
The Computation of the Inverse Kinematics of a 3 DOF Redundant
Manipulator via an ANN Approach and a Virtual Function
Shahnaz Habibkhah
a
and Rene V. Mayorga
b
Department of Industrial Systems Engineering, University of Regina, Regina, SK, Canada
Keywords: Artificial Neural Network, Redundant Robotic Manipulators, Inverse Kinematics.
Abstract: In this paper a method based on Artificial Neural Networks (ANNs) is presented to solve the Inverse
Kinematics (IK) of 3 degrees of freedom (DOF) redundant manipulators. In order to obtain the manipulator’s
joint angles coordinates and solve the IK problem with acceptable accuracy; the forward kinematics equations
of the manipulator are used to obtain position of the end effector, and also a virtual auxiliary function is
included in the ANN approach. Then, the trained ANN’ ability to track a designed target trajectory is tested
inside the workspace of the manipulator in two scenarios with different inputs data to the ANN.
1 INTRODUCTION
The study of robot manipulators motion without
considering the imposed forces is called Forward
Kinematics (FK) (Wang & Chen, 1991, and Murray
et al., 2017). In the FK of a robot manipulator, in
order to obtain the position coordinates of the end-
effector, the robot joint angles are specified.
Whereas, obtaining the joint angles of a robotic
manipulator from Cartesian coordinates of the end
effector is called the Inverse Kinematics (IK) problem
(Wang & Chen, 1991). The IK problem has been very
important as the robot complexity increases, since
obtaining a solution for IK becomes difficult
(Alavandar & Nigam, 2008, and Daya et al., 2010).
This issue is more difficult for redundant
manipulators (RM) (Fu et al., 2013).
The RM is a kind of manipulator in which the
number of DOF is more than what is needed to
perform a task (Chirikjian, 1992, and Sciavicco &
Siciliano, 1988). For this kind of manipulators,
normally there is no direct solution to obtain IK.
Over the years, many numerical and non-
numerical solutions have been proposed to solve IK
of non-RMs and RMs. Aiming to solve the IK of
manipulators, (Oh et al., 1984) has presented a
Newton-Raphson numerical method. The Oh’s paper
has considered a 7 DOF RM as the case study and has
a
https://orcid.org/0000-0002-3138-7928
b
https://orcid.org/0000-0001-8365-6571
taken the position coordinates of all links, as well as
the orientation of the end effector into account, as the
constraints. (Gómez et al., 2015) has combined
geometric and numerical ideas to present a solution
for IK. In order to solve IK of RM, (Sciavicco &
Siciliano, 1988) have applied some constraints related
to joint limitations and obstacle avoidance, and a
numerical solution is proposed. Another solution to
the IK of 7 DOF RM is proposed by (Zhao et al.,
2018) where the Newton-Raphson iteration approach
is combined with a damped least square method.
(Zhao et al., 2016) has presented another solution for
the IK of Hyper RM (HRM), in which a new
geometrical method is used. A regression solution has
been also proposed by (Sariyildiz, et al., 2012) to
solve IK of a 7 DOF RM. In this case seven separate
support vector regressions (SVR) are used to solve
the problem since the SVR structure is multi input
single output. However, the SVR solution failed to
solve IK problem of redundant manipulators in the
study proposed by (Bocsi, et al., 2011).
Another approach to solve IK of manipulators is
using non-conventional tools. The idea of using
Fuzzy logic to solve IK is presented by (Howard &
Zilouchian, 1998, and Palm, 1992, and Xu &
Nechyba, 1993). (Palm, 1992) has used this tool to
solve the IK of RMs and a 4 DOF is considered as
case study. Whereas, (Xu & Nechyba, 1993) has used
this tool to solve the IK for both RM and non-RM.
Habibkhah, S. and Mayorga, R.
The Computation of the Inverse Kinematics of a 3 DOF Redundant Manipulator via an ANN Approach and a Virtual Function.
DOI: 10.5220/0009834904710477
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 471-477
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
471
Using Adaptive Neuro-Fuzzy Inference System
(ANFIS), is another idea proposed by (Mohammed
Jasim, 2011). To solve the IK of 2 DOF and 3 DOF
manipulators, (Alavandar & Nigam, 2008) have used
ANFIS. In the paper, in order to provide training data
for ANFIS of 2 DOF manipulator, positions of end
effector are used, and data to train ANFIS of 3 DOF
manipulator is obtained from end effector positions
coordinates and summation of joint angles. Similarly,
(Duka, 2015) has used the end effector positions and
summation of joint angles to train ANFIS to solve the
IK of 3 DOF manipulators.
Some authors have also used ANN to solve the IK
of manipulators. (Duka, 2014) has used ANN to solve
IK of 3 DOF RM in which position coordinates of the
end effector and summation of joint angles are
training inputs. This tool is used to solve IK of a 6
DOF manipulator by (Almusawi et al., 2016) and
training inputs are the end effector desired positions
and orientations as well as current joint angles’
feedback. The paper presented by (El-Sherbiny et al.,
2018) has compared the application of ANN, ANFIS
and Genetic Algorithms methods to solve IK of a 5
DOF manipulator. According to paper’s claims, the
ANN and ANFIS yield the best results. (Thuruthel et
al., 2016) has proposed a solution to solve the inverse
statistics (IS) of redundant soft robots; according to
this study, the inverse statistics is analogous to IK for
rigid robots; thence, many approaches used to solve
IK problem of rigid RM can be utilized to solve the
IS. In their solution, Artificial Neural networks are
used for mapping purposes and the training method is
the Bayesian regularization method (Foresee at al.,
1997).
In this paper, an ANN is used to solve IK problem
of 3 DOF RMs. In order to prepare data to train ANN,
joint angles values are selected randomly and are put
in FK equations of the manipulator and the end
effector’s position as well as its orientation are set as
input data. The orientation of the end effector is
defined according to (Nakamura, 1990) which is
equal to the function cos of the summation of the joint
angles. To evaluate the ANN performance to track a
target trajectory inside the workspace of the
manipulator, the coordinates of the end effector as
well as its expected orientations are applied as the
inputs of ANN. For this purpose, two different
scenarios are considered; in the first case it is assumed
that the end effector should orient in parallel to the
line connected from the end effector to the origin, and
in the second case it is assumed that the end effector
is supposed to orient in parallel to the y axis.
The remainder of this paper is organized as
follows: Section 2 describes the robot manipulator
kinematics equations and end effector workspace.
The Section 3 explains the ANN, and the Section 4
presents the simulation results of the ANN training
and tracking performance of the ANN in 2 scenarios.
Finally, section 5 contains some Conclusions.
2 PROBLEM DESCRIPTION
2.1 Redundant Robot Manipulator
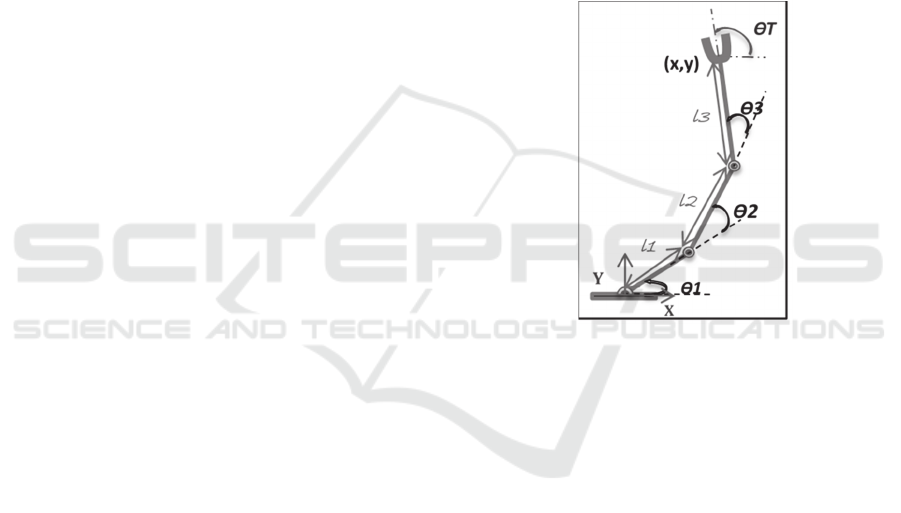
Fig. 1 shows the 3 DOF redundant manipulator (RM)
considered in this paper. To calculate the
manipulator’s end-effector position using the joint
angles, the FK equations are considered.
Figure 1: 3 DOF Redundant Robot Manipulator.
According to the FK equations, the Cartesian
coordinates of the end effector are:
𝑋𝑙1𝑐𝑜𝑠
𝜃1
𝑙2𝑐𝑜𝑠
𝜃1 𝜃2
𝑙3𝑐𝑜𝑠
𝜃1 𝜃2 𝜃3
(1
)
𝑌 𝑙1 𝑠𝑖𝑛𝜃1 𝑙2 𝑠𝑖𝑛
𝜃1 𝜃2
𝑙3𝑠𝑖𝑛
𝜃1 𝜃2 𝜃3
(2
)
Where ɵ
1
, ɵ
2
, and ɵ
3
are the first, second and third
joint angles of the manipulator, and l1, l2 and l3 are
the lengths of the robot arms.
On the other hand, it is impossible to find a unique
set of joint angles of the manipulator from the end
effector’s position coordinates. Normally, an infinite
set of solutions exist. However, an effective approach
as proposed here to deal with this problem, is to
consider a constraint as an auxiliary virtual function
that helps to set a unique solution. It is important to
mention here, that many auxiliary virtual functions
are possible. In fact, a careful selection of the virtual
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
472
auxiliary function may yield an explicit solution to
the IK problem.
Here, as a particular case, the auxiliary virtual
function is selected to represent the end effector’s
orientation. In this paper, the orientation of the end
effector is defined according to (Nakamura, 1990),
which is equal to cos of the summation of the joint
angles as defined next:
𝐶: 𝑐𝑜𝑠
𝜃1 𝜃2 𝜃3
𝑐𝑜𝑠 𝜃𝑇
(3)
Where ɵ
T
is summation of three joint angles. The
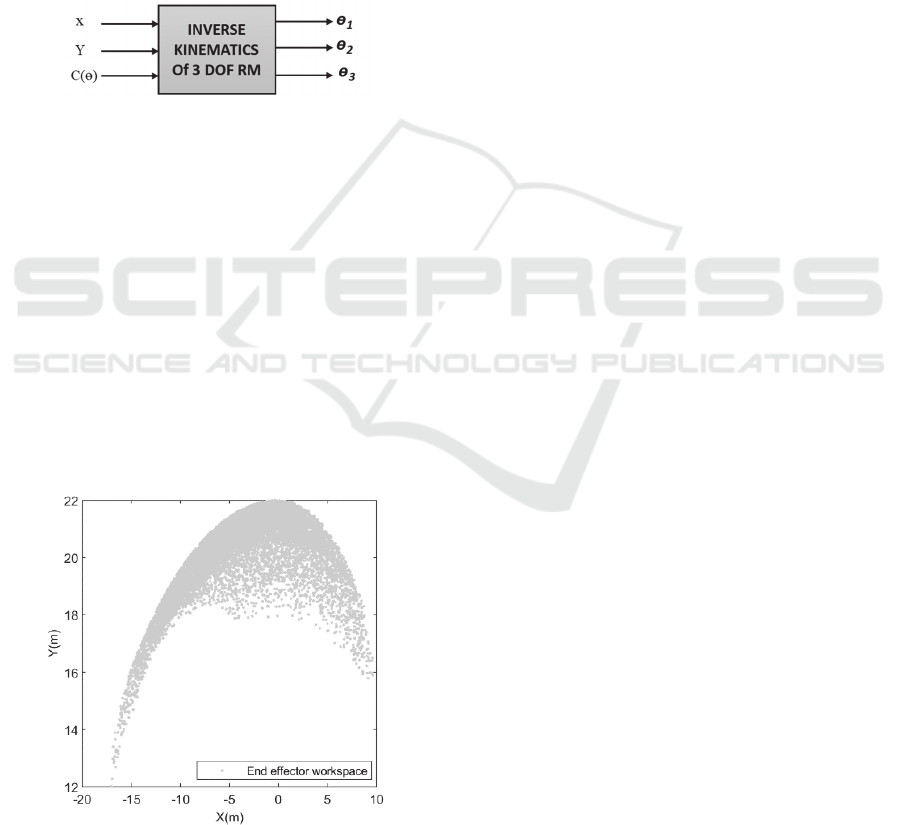
idea of solving IK is depicted in Figure 2; where C(θ)
can be a general case.
Figure 2: Inverse Kinematics Proposed Approach.
2.2 The End Effector Workspace
In order to get a manipulator’s workspace, the length
of the three links as well as the joint angles ranges
should be specified. Changing the joint angles and
feeding them into the FK equations leads to find the
robot’s end effector’s positions and workspace.
Assuming l1=10, l2=7, l3=5, and limiting the angles
inside the ranges mentioned in (4), the end effector’s
positions and workspace of the manipulator will be as
in Figure 3.
𝜋/2 𝜃1 3𝜋/4, 𝜋/4 𝜃2 0 𝑎𝑛𝑑 𝜋/4
𝜃3𝜋/4
(4)
Figure 3: End-effector’s workspace.
3 ANN DESCRIPTION
3.1 ANN Structure
The ANN used in this paper is an adaptive network.
A feedforward network contains some nodes that are
connected by some links together to make
relationships between the nodes. The network takes
some income signals, performs node functions on
signals and generate the outputs (Jang et al., 1997).
An important point about the ANN is that it is able to
update the nodes’ parameters to minimize the error.
Aiming to have an effective ANN, a training
function is needed. A popular training function in
MATLAB is trainlm function which updates bias and
weights using Levenberg-Marquardt (LM)
optimization method. Although this method needs
more memory than other methods; it is the fastest
backpropagation algorithm and is the first choice in
MATLAB (MATLAB, 2018). In this algorithm, in
the first step, some initial random values are assumed
for the weights and the total error is evaluated. Then,
the weights are updated by using a Jacobian matrix
which contains the derivatives of errors with respect
to the weights and biases. Finally, the total error is
updated with respect to the new weights; and based
on the error changes (increment or decrement), the
algorithm switches to other algorithms. The process
will stop once the error amount is smaller than the
required value. Indeed, this algorithm switches to the
steepest descent (also known error backpropagation)
algorithm (Rumelhart et al., 1986) when the curvature
area is complex; and when the local curvature is
quadratic, it switches to the Gauss-Newton (GN)
algorithm to be computationally faster. Still, the LM
is more robust since it can converge if the error
surface is very complex (Yu & Wilamowski, 2011).
3.2 Data Preparation for ANN Design
In order to generate data sets to train the ANN, the
joint angles are feed in (1)-(3) and related end
positions and orientations are obtained. In order to do
this, 10000 random samples for each angle are created
from which 7000 are used for training; 1500 are used
for testing; and 1500 are used for validation. The
inputs of the ANN are these data sets and outputs will
be the joint angles.
The Computation of the Inverse Kinematics of a 3 DOF Redundant Manipulator via an ANN Approach and a Virtual Function
473
4 SIMULATIONS
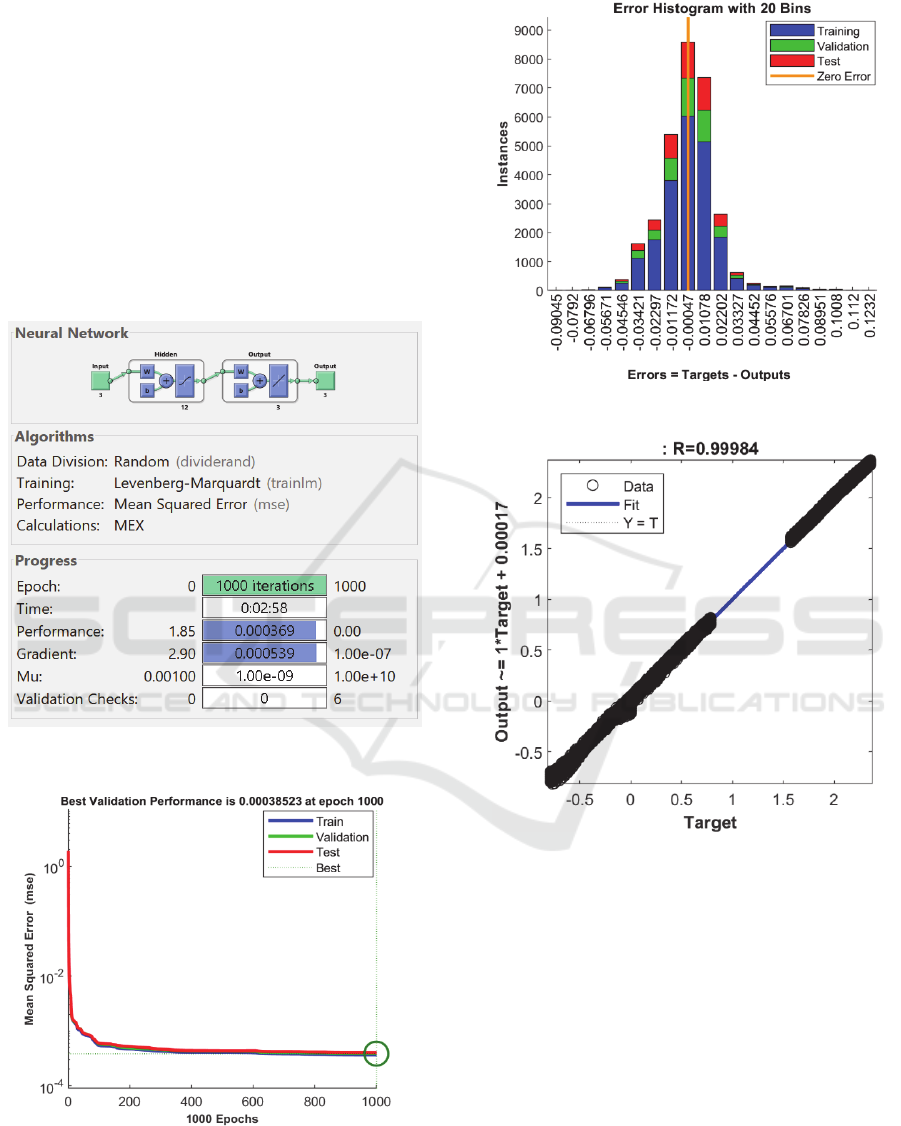
In this section, an ANN with 12 hidden layers is
trained, providing training data mentioned in the last
section, and the training results are depicted. Then
target trajectories are designed inside the workspace
and the ANN ability to track them is considered.
4.1 ANN Design Simulation
Here the ANN training, its performance, error
histogram, and scatter plot of data points’ fit are
shown respectively.
Figure 4: ANN training.
Figure 5: ANN Performance.
Figure 6: ANN Error Histogram.
Figure 7: Scatter plot of data points’ fit.
4.2 Target Trajectory Tracking
The target trajectory is defined by the following
equation and is depicted in Figure 8.
𝑡 65°: 120°, 𝑥 1 16.5 cos
𝑡
,𝑦
5 16.5sin 𝑡
(5
)
Where x and y are the coordinates of the trajectory
points. In the following subsection, the data
provision for ANN is discussed and the ANN tracking
performance is considered for two cases scenarios.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
474
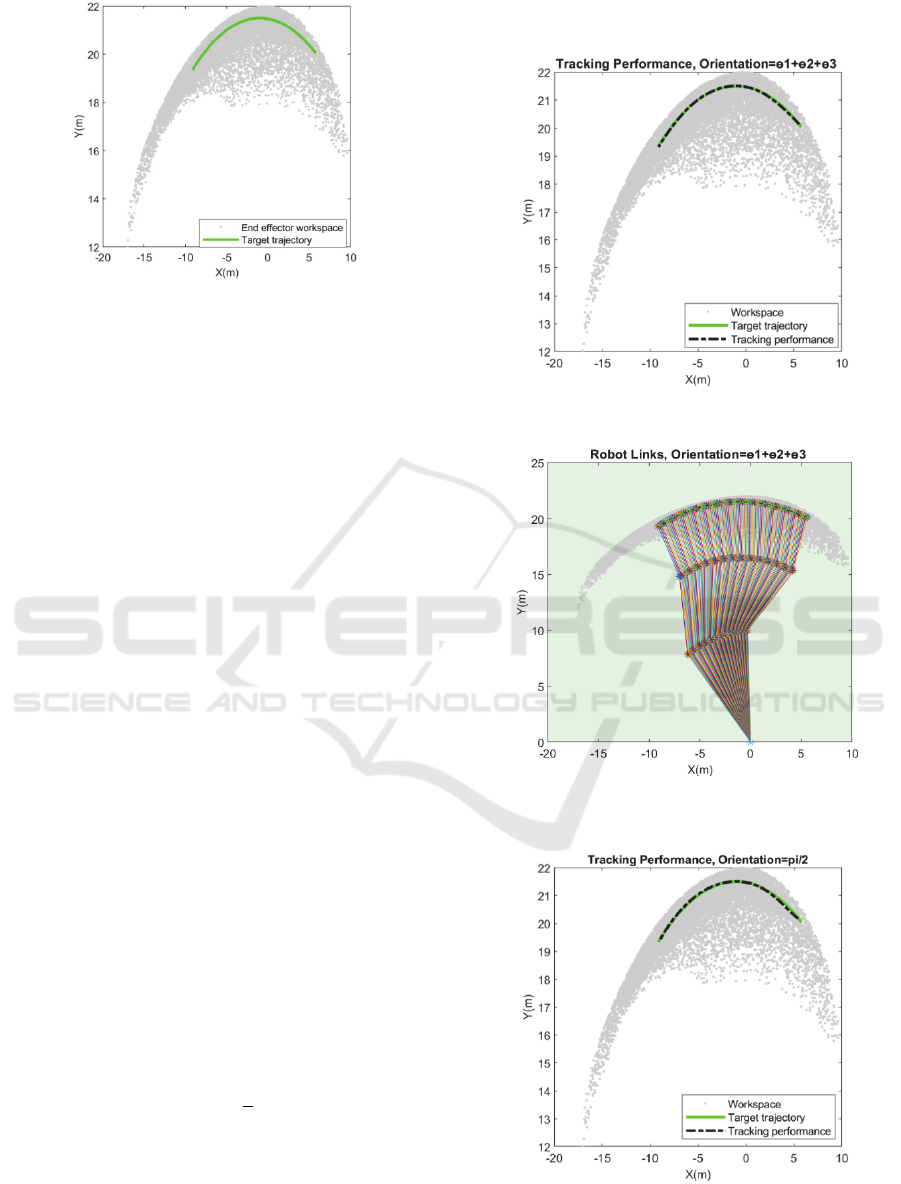
Figure 8: Target trajectory inside the workspace.
4.2.1 First Case Scenario
Regarding to Figure 2, three inputs data are needed
for the ANN inputs. Two of them are the coordinates
of the trajectory points; and the third one should
provide orientation of the end effector as in Eq.(3). In
order to provide data for orientation related to the
points of the target trajectory, in the first case,
orientations of the robot’s end effector are built using
end effector coordinates and is assumed cos(atan2(y,
x)) which means the direction of a line connected
from the end effector to the base of the robot as origin.
Hence, the coordinates of the trajectory points and the
amounts of cos(atan2(y, x)) are inputs of the ANN:
𝑖𝑛𝑝𝑢𝑡𝑠1: 𝑥, 𝑦, cos 𝑎𝑡𝑎𝑛2
𝑥 , 𝑦
]
(6)
The tracking performance of ANN is illustrated in
Figure 9 and the manipulator links status during the
tracking act are shown in Figure 10. As the Figure 10
illustrates, the end effector of the manipulator at each
point is directing toward the origin.
4.2.2 Second Case Scenario
In this scenario, in order to provide data for
orientation related to the points of the target
trajectory, the orientation of the robot end effector is
assumed vertical, which means parallel to the
direction of y-axis, or perpendicular to the x-axis.
Hence the coordinates of the trajectory points and
zero digit (cos(90
°
)) are inputs of the ANN since :
𝑖𝑛𝑝𝑢𝑡𝑠2: 𝑥, 𝑦, cos
]
(7)
The tracking performance of ANN is illustrated in
Figure 11 and the manipulator links status during the
tracking act are shown in Figure 12. As the Figure 12
illustrates, the end effector of the manipulator at each
point is directing perpendicular to the x-axis.
Figure 9: Tracking performance of first scenario.
Figure 10: Manipulators links status in first scenario.
Figure 11: Tracking performance of second scenario.
The Computation of the Inverse Kinematics of a 3 DOF Redundant Manipulator via an ANN Approach and a Virtual Function
475
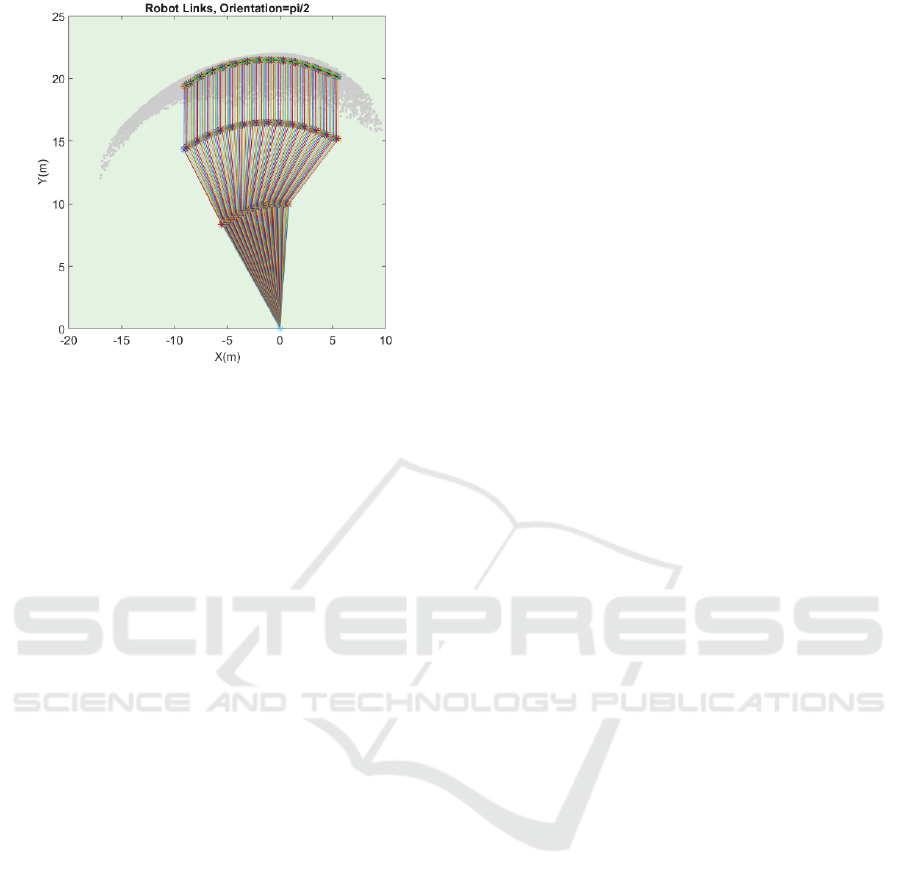
Figure 12: Manipulators links status in second scenario.
As observed at the top portion of the concave
curve in the Figure 12, the proposed approach can
deal with joint configurations close to singularities
(the manipulator fully stretched) without losing
accuracy in the trajectory tracking. This is due to the
auxiliary virtual function acting also as a constraint
(Mayorga, Carrera, 2007) for the singularities
prevention.
5 CONCLUSIONS
In this paper a method based on an Artificial Neural
Network (ANN) approach is presented to solve the IK
of 3 degrees of freedom (DOF) redundant
manipulators. To train the ANN, different joint angles
are feed into the forward kinematics of the
manipulator. Then, the coordinates of the end
effector, and also a virtual function that includes their
orientation are used to provide input data for training
an ANN model that gives as output the joint angles.
According to the ANN training results including
performance and error histogram, the designed ANN
model is satisfactory.
The trained ANN’s ability to track a designed
target trajectory inside the workspace of the
manipulator is tested in two scenarios with different
target orientation of the end effector’s points. In both
cases, the training performance is accurate.
Since the relationship between the inputs and
outputs is nonlinear, the proposed ANN approach is
an efficient solution for this problem compared to
other methods. Moreover, the proposed solution here
is suitable when the purpose is tracking some position
coordinates when one or more constraints exist. In
these cases, finding numerical solutions might be
complex and time-consuming. However, in the
proposed approach, the constraints can be easily
included as virtual functions.
REFERENCES
Alavandar, S., & Nigam, M. J. (2008). Inverse kinematics
solution of 3DOF planar robot using ANFIS. Int. J. of
Computers, Communications & Control, 3, 150-155.
Alavandar, S., & Nigam, M. J. (2008). Neuro-Fuzzy based
Approach for Inverse Kinematics Solution of Industrial
Robot Manipulators. International Journal of
Computers Communications & Control, 3(3), 224.
Almusawi, A. R., Dülger, L. C., & Kapucu, S. (2016). A
New Artificial Neural Network Approach in Solving
Inverse Kinematics of Robotic Arm (Denso VP6242).
Computational Intelligence and Neuroscience, 2016, 1-
10.
Bócsi, B., Nguyen-Tuong, D., Csató, L., Schoelkopf, B., &
Peters, J. (2011, September). Learning inverse
kinematics with structured prediction. In 2011
IEEE/RSJ International Conference on Intelligent
Robots and Systems (pp. 698-703). IEEE.
Chirikjian, G. S. (1992). Theory and applications of hyper-
redundant robotic manipulators (Doctoral dissertation,
California Institute of Technology).
Daya, B., Khawandi, S., & Akoum, M. (2010). Applying
Neural Network Architecture for Inverse Kinematics
Problem in Robotics. Journal of Software Engineering
and Applications, 03(03), 230-239.
Duka, A. (2014). Neural Network based Inverse Kinematics
Solution for Trajectory Tracking of a Robotic Arm.
Procedia Technology, 12, 20-27.
Duka, A. (2015). ANFIS Based Solution to the Inverse
Kinematics of a 3DOF Planar Manipulator. Procedia
Technology, 19, 526-533.
El-Sherbiny, A., Elhosseini, M. A., & Haikal, A. Y. (2018).
A comparative study of soft computing methods to
solve inverse kinematics problem. Ain Shams
Engineering Journal, 9(4), 2535-2548.
Fu, Z., Yang, W., & Yang, Z. (2013). Solution of Inverse
Kinematics for 6R Robot Manipulators With Offset
Wrist Based on Geometric Algebra. Journal of
Mechanisms and Robotics, 5(3).
Foresee, F. D., Hagan, M. T., 1997. Gauss-Newton
approximation to Bayesian regularization. In Proc.
1997 International Joint Conference on Neural
Networks, 1930–1935.
Gómez, S., Sánchez, G., Zarama, J., Ramos, M. C.,
Alcántar, J. E., Torres, J., ... & Lopez, J. A. (2015).
Design of a 4-DOF robot manipulator with optimized
algorithm for inverse kinematics. International Journal
of Mechanical and Mechatronics Engineering, 9(6),
929-934.
Howard, D. W., & Zilouchian, A. (1998). Application of
fuzzy logic for the solution of inverse kinematics and
hierarchical controls of robotic manipulators. Journal of
Intelligent and Robotic Systems, 23(2/4), 217-247.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
476

Jang, J., Sun, C., & Mizutani, E. (1997). Neuro-Fuzzy and
Soft Computing-A Computational Approach to
Learning and Machine Intelligence [Book Review].
IEEE Transactions on Automatic Control, 42(10),
1482-1484.
MATLAB and Statistics Toolbox Release 2018a, The
MathWorks, Inc., Natick, Massachusetts, United States.
Mayorga, R. V., Carrera, J. (2007). A Radial Basis Network
Approach for the Computation of Inverse Continuous
Time Variant Functions. International Journal of Neural
Systems 17 (03), 149-160.
Mohammed Jasim, W. (2011). Solution of Inverse
Kinematics for SCARA Manipulator Using Adaptive
Neuro-Fuzzy Network. International Journal on Soft
Computing, 2(4), 59-66.
Murray, R. M., Li, Z., & Sastry, S. S. (2017). A
Mathematical Introduction to Robotic Manipulation.
Nakamura, Y. (1990). Advanced robotics: redundancy and
optimization. Addison-Wesley Longman Publishing
Co., Inc..
Oh, S., Orin, D., & Bach, M. (1984). An inverse kinematic
solution for kinematically redundant robot
manipulators. Journal of Robotic Systems, 1(3), 235-
249.
Palm, R. (1992). Control of a redundant manipulator using
fuzzy rules. Fuzzy Sets and Systems, 45(3), 279-298.
Rumelhart, D. E., Hinton, G. E., & Williams, R. J. (1986).
Learning representations by back-propagating errors.
Nature, 323(6088), 533-536.
Sariyildiz, E., Ucak, K., Oke, G., Temeltas, H., & Ohnishi,
K. (2012, July). Support Vector Regression based
inverse kinematic modeling for a 7-DOF redundant
robot arm. In 2012 International Symposium on
Innovations in Intelligent Systems and Applications
(pp. 1-5). IEEE.
Sciavicco, L., & Siciliano, B. (1988). A solution algorithm
to the inverse kinematic problem for redundant
manipulators. IEEE Journal on Robotics and
Automation, 4(4), 403-410.
Thuruthel, T., Falotico, E., Cianchetti, M., Renda, F., &
Laschi, C. (2016, July). Learning global inverse statics
solution for a redundant soft robot.
Wang, L., & Chen, C. (1991). A combined optimization
method for solving the inverse kinematics problems of
mechanical manipulators. IEEE Transactions on
Robotics and Automation, 7(4), 489-499.
Xu, Y., & Nechyba, M. (1993). Fuzzy inverse kinematic
mapping: rule generation, efficiency, and
implementation. Proceedings of 1993 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS '93).
Yu, H., & Wilamowski, B. (2011). Levenberg–Marquardt
Training. Electrical Engineering Handbook, 1-16.
Zhao, J., Xu, T., Fang, Q., Xie, Y., & Zhu, Y. (2018). A
Synthetic Inverse Kinematic Algorithm for 7-DOF
Redundant Manipulator. 2018 IEEE International
Conference on Real-time Computing and Robotics
(RCAR).
Zhao, J., Zhao, L., & Liu, H. (2016). Motion planning of
hyper-redundant manipulators based on ant colony
optimization. 2016 IEEE International Conference on
Robotics and Biomimetics (ROBIO).
The Computation of the Inverse Kinematics of a 3 DOF Redundant Manipulator via an ANN Approach and a Virtual Function
477
