
An Efficient GPGPU based Implementation of Face Detection Algorithm
using Skin Color Pre-treatment
Imene Guerfi
a
, Lobna Kriaa
b
and Leila Azouz Saidane
CRISTAL Laboratory, RAMSIS Pole, National School for Computer Sciences (ENSI), University of Manouba, Tunisia
Keywords:
GPU Computing, Parallel Programming, Face Detection, AdaBoost, Haar Cascade, Skin Color Segmentation.
Abstract:
Modern and future security and daily life applications incorporate several face detection systems. Those sys-
tems have an exigent time constraint that requires high-performance computing. This can be achieved using
General-Purpose Computing on Graphics Processing Units (GPGPU), however, some existing solutions to sat-
isfy the time requirements may degrade the quality of detection. In this paper, we aimed to reduce the detection
time and increase the detection rate using the GPGPU. We developed a robust, optimized algorithm based on
an efficient parallelization of the face detection algorithm, combined with the reduction of the research area
using a mixture of two color spaces. for skin detection. Central Processing Unit (CPU) serial and parallel ver-
sions of the algorithm are developed for comparison’s sake. A database is made using a classification method
to evaluate our approach in order to discuss all scenarios. The experimental results show that our proposed
method achieved 27,1x acceleration compared to the CPU implementation with a detection rate of 97,05%.
1 INTRODUCTION
In the last decade, the identification requirements of
each individual are increasing rapidly, especially in
security and daily life applications. Security experts
have suggested biometrics as an efficient method to
ensure security. The trend started with fingerprints
and now it is shifting towards facial recognition (Khan
et al., 2017). The report published by Market research
Future predicts that the global facial recognition mar-
ket will increase considerably during the forecast pe-
riod (MRF, 2019) due to the growing need for surveil-
lance and security as a result of increased criminal
activities. Mobile facial identification and the rise in
popularity of smart homes are also fueling this growth
of the facial identification market.
A face processing system comprises face detec-
tion, recognition, tracking, and rendering. The pri-
mary and substantial aspects of any face processing
system are face detection. It is used to detect the pres-
ence and the precise location of one or more faces in a
digital image or video sequence. Recently face detec-
tion has received significant attention in academia and
industry, mainly due to its wide range of applications,
such as public security, video conferencing, entertain-
a
https://orcid.org/0000-0002-2886-1713
b
https://orcid.org/0000-0002-2112-7807
ment and human-machine interface. Several of these
applications are interactive and require reliable and
fast face processing. Paul Viola and Michael Jones re-
alized the first real-time face detection algorithm (Vi-
ola and Jones, 2001). Until today, the viola-jones al-
gorithm has been widely applied in digital cameras
and photo organization software.
The research on face detection, for the most part,
has been focused on designing new algorithms or im-
proving the detection rate and decreasing the false
positive rate of the existing methods. Therefore, the
majority of the available works are software solutions
designed for general-purpose computational proces-
sors (GPP) (Bilaniuk et al., 2014). However, detect-
ing faces in images is a computationally expensive
task; hence, we need to look for high-performance so-
lutions for fast face detection at reasonable cost. Re-
cently, processor performance has evolved by increas-
ing the number of computing units. In particular, the
graphics-processing unit (GPU) was used in collabo-
ration with the CPU to accelerate high computational
general-purpose applications, by offloading compute-
intensive portions of the application to the GPU. At
the same time, the rest of the code still runs on the
CPU. Heterogeneous computing that combines tra-
ditional processors coupled with GPU has become a
promising solution in most systems to achieve higher
performance. The GPUs, in general, are used to accel-
574
Guerfi, I., Kriaa, L. and Saidane, L.
An Efficient GPGPU based Implementation of Face Detection Algorithm using Skin Color Pre-treatment.
DOI: 10.5220/0009833305740585
In Proceedings of the 15th International Conference on Software Technologies (ICSOFT 2020), pages 574-585
ISBN: 978-989-758-443-5
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

erate applications as they integrate hundreds of cores
designed to handle many simultaneous tasks.
Various works studied how to redesign the face
detection algorithm for GPU parallel execution opti-
mally. Many promising results have been presented
and a lot of works claim to offer the fastest GPU im-
plementation. However, the efficiency of face detec-
tion algorithms does not depend only on the speed of
detection, because this last can be affected easily by
the change of some parameters such as the number of
the classifiers, the step of scanning, the scaling fac-
tor, the size of images and the number of faces in the
image (Wei and Ming, 2011). To provide an efficient
face detection algorithm the detection rate and speed
should not be decreased and false-positive should not
be increased.
In the present work, we present an efficient
GPGPU based implementation of the Viola-Jones
face detection algorithm using the ”Compute Unified
Device Architecture” (CUDA) programming model.
For the time acceleration and the improvement of the
detection rate, we propose a new optimized parallel
method combined with a research area reduction us-
ing a skin color pre-treatment. In addition, an upscal-
ing for the size of the small images was done to im-
prove the detection rate. For comparison reasons, a
CPU single-threaded and CPU multithreaded version
of the code was developed. Standard and stable pa-
rameters and a lot of image sizes with variant face
numbers were used for all the implementations so that
the evaluation could be more effective.
We evaluate our efficient face detection algorithm
using a created database composed of 700 color im-
ages taken from the web. The experimental results
indicate that our parallel face detector achieves 27.1x
and 18x speedup compared to CPU single-threaded
and multi-threaded versions respectively while in-
creasing the accuracy and reducing false-positive rate.
The rest of this paper is organized as follows: The
next section gives an overview of the related work.
Section 3 describes the Viola and Jones algorithm.
Section 4 gives details of the proposed optimized al-
gorithm for face detection. Section 5 elaborates ex-
perimental results and discussion, and finally. Section
6 presents the conclusion.
2 RELATED WORKS
Face detection was one of the first computer vision
applications; the search in this field was begun since
the middle of the 1960s. Indeed, the majority of
the early works did not propose efficient methods
(Zafeiriou et al., 2015). In 2001, a revolution in this
field was made when Viola and Jones invented a re-
liable face detection technique with promising accu-
racy and high-efficiency(Viola and Jones, 2001). The
used algorithm was based on Adaboost training and
Haar cascading. It achieved an average of about 15
frames per second (fps) for a (320x288) image. It
made face detection practically feasible in real-world
applications. Until today, this algorithm has been
widely applied in digital cameras and photo organi-
zation software.
Since then, many relevant works have been pre-
sented for accelerating the Viola-Jones face detec-
tion algorithm. The available computational re-
sources limited earlier implementation of this al-
gorithm. However, with the increase of low-cost,
high-performance computational devices, many re-
searchers have begun to explore the usage of these
features.
(Sharma et al., 2009) introduced the first GPU re-
alization of a face detection algorithm using CUDA.
They reached a detection at 19 fps on a (1280 × 960)
video stream, which is a good improvement in detec-
tion time. However, the accuracy was only 81% with
16 false positives on the CMU test set. (Kong and
Deng, 2010) proposed a GPU accelerated OpenCV
implementation that achieved between 49.08 ms and
196.73ms (20,4-5,1 fps) on images from (340x240)
to (1280x1024). (Hefenbrock et al., 2010) presented
a multi-GPU implementation. They used a desktop
server containing four Tesla GPUs for the implemen-
tation and achieved 15.2 fps. However, the integral
image computation was not parallelized. In their other
works, (Nguyen et al., 2013) they used 5 Fermi GPUs
and improved in efficiency by using a dynamic warp
scheduling approach to eliminate thread divergence.
They used the technique of thread pool mechanism to
significantly alleviate the cost of creating, switching,
and terminating threads. They reported realized 95.6
fps on (640x480) images. The proposed approach
(Devrari and Kumar, 2011) includes enhanced Haar-
like features and uses SVM (Support Vector Machine)
for training and classification. They achieved 3.3
fps on (2592x1900) images. The (Wei and Ming,
2011) implementation reached 12 fps on (640*480)
images. However, the used method causes inade-
quate usage of resources. A Haar-based face detection
for (1920x1080) video on GTX470 was proposed by
(Oro et al., 2011) (Oro et al., 2012) and achieved a
performance of 35 fps. (Tek and G
¨
okmen, 2012) used
3 GPUs for the implementation and they achieved 99
fps with good detection rate even though the classifier
was small.
Other relevant implementations of the algorithm
are found in the work of (Jeong et al., 2012), (Li et al.,
An Efficient GPGPU based Implementation of Face Detection Algorithm using Skin Color Pre-treatment
575
2012)and (Sun et al., 2013), whose experiments re-
veal improve detection speed for high-resolution im-
ages. Other works (Meng et al., 2014) (Bhutekar and
Manjaramkar, 2014) focused on improving detection
for small images.
(Chouchene et al., 2015) proposed parallel imple-
mentation of face detection on (NVidia310M) GPU
that could achieve 24 fps for small images (32x32)
and only 11 fps for bigger images (1024x1024). (Wai
et al., 2015) presented Open CV accelerated imple-
mentation using the latest GPU at that time (Tesla
k40) and they achieved 37.91 fps on (640x480) im-
ages. (Fayez et al., 2016) proposed an image scan-
ning framework using GPGPU in which they have
implemented the Viola-Jones algorithm. They have
achieved 37fps for (1920x1080) images. In (Jain
and Patel, 2016) introduced an implementation that
increases the speed of the algorithm 19.75x over a
CPU implementation. (Mutneja and Singh, 2018)
presented face detection using a combination of mo-
tion and skin color segmentation, the test samples
were low-resolution videos (600x800) and they get
3.16 fps. In their other work (Mutneja and Singh,
2019) much more analysis was done for the algorithm
and they achieve 25 fps for (480x640) images. (Pati-
dar et al., 2020) presented an optimized parallel face
detection system using CUDA on GPU and achieved
1.28 fps in the FDDB image set. Although interesting
results were recorded, a lack of information about the
used classifier and accuracy and false-positive and the
test data set in most of the works.
3 BACKGROUND
3.1 Viola-Jones Algorithm
The Viola-Jones Face detection algorithm is one
of the best face detection algorithms that have
been developed through time. The algorithm is an
appearance-based model, and it can be divided into
two phases. A training phase where a cascade clas-
sifier is generated based on a set of positive and neg-
ative samples. It is a concatenation of several weak
classifiers divided into stages that get increasingly
complex. With the AdaBoost algorithm for the selec-
tion of informative human facial features. The second
is the detection phase, where the algorithm will detect
faces in a given image using the pre-trained cascade
classifier. A small window will scan the image, at
each position the cascade classifier is applied. To re-
duce the treatment if a window doesn’t pass a stage of
the cascade classifier is directly rejected. Otherwise,
it passes to the next stage; if it passes all stages, then it
contains a face. This algorithm consists of four parts:
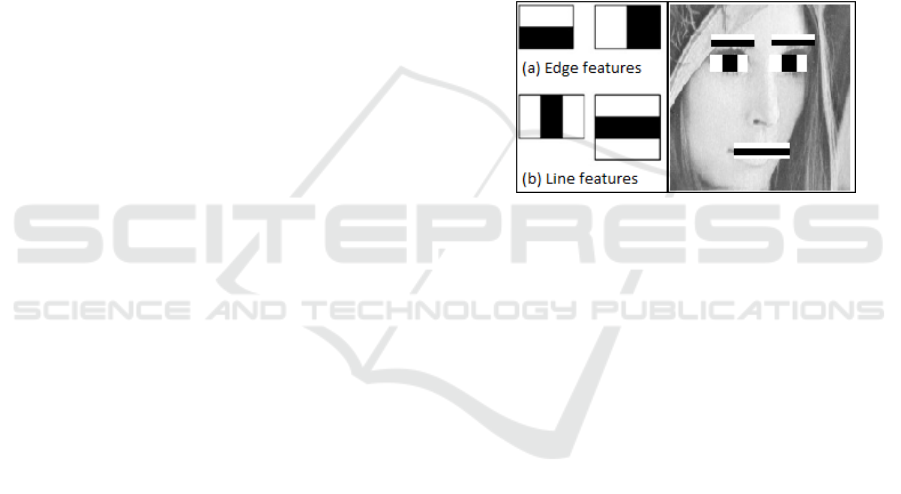
3.1.1 Haar-Like Features
Human faces share some similar properties. These
properties are mapped mathematically to the Haar
features (Figure 1). A Haar feature of a rectangle h(r)
is a scalar calculated by summing up the pixels in the
white region p(w) and subtracting those in the dark
region p(b) (equation 1).
h(r) =
∑
p(w) −
∑
p(b) (1)
These features are used in the training step to form the
classifiers and in the detection step. When an image
is scanned to detect a face, at each step, the features
in the actual window are compared to the trained one.
Figure 1: Fore types of Haar features with example.
3.1.2 Integral Image
The integral image was proposed to overcome the
huge amount of calculation caused by identifying
Haar features. The integral value I at pixel (x, y) is
the sum of all the pixels above it and to its left (equa-
tion 2).
I(x, y) =
∑
´x≤x, ´y≤y
i( ´x, ´y) (2)
This allows very fast feature evaluation, since calcu-
lating the sum of pixels inside a rectangle requires the
Integral image values of the four corners only (equa-
tion 3), which leads to computing features in constant
time efficiently.
h(x ´xy ´y) = I( ´x, ´y) − I(x, ´y) − I( ´x, y) + I(x, y) (3)
3.1.3 AdaBoost
Adaptive Boosting is a machine learning algorithm.
They are applied in the training phase to select the
features that best describe a face. This algorithm com-
bines these features into weak classifiers, and then it
groups them to create strong classifiers that form the
cascade classifier.
ICSOFT 2020 - 15th International Conference on Software Technologies
576
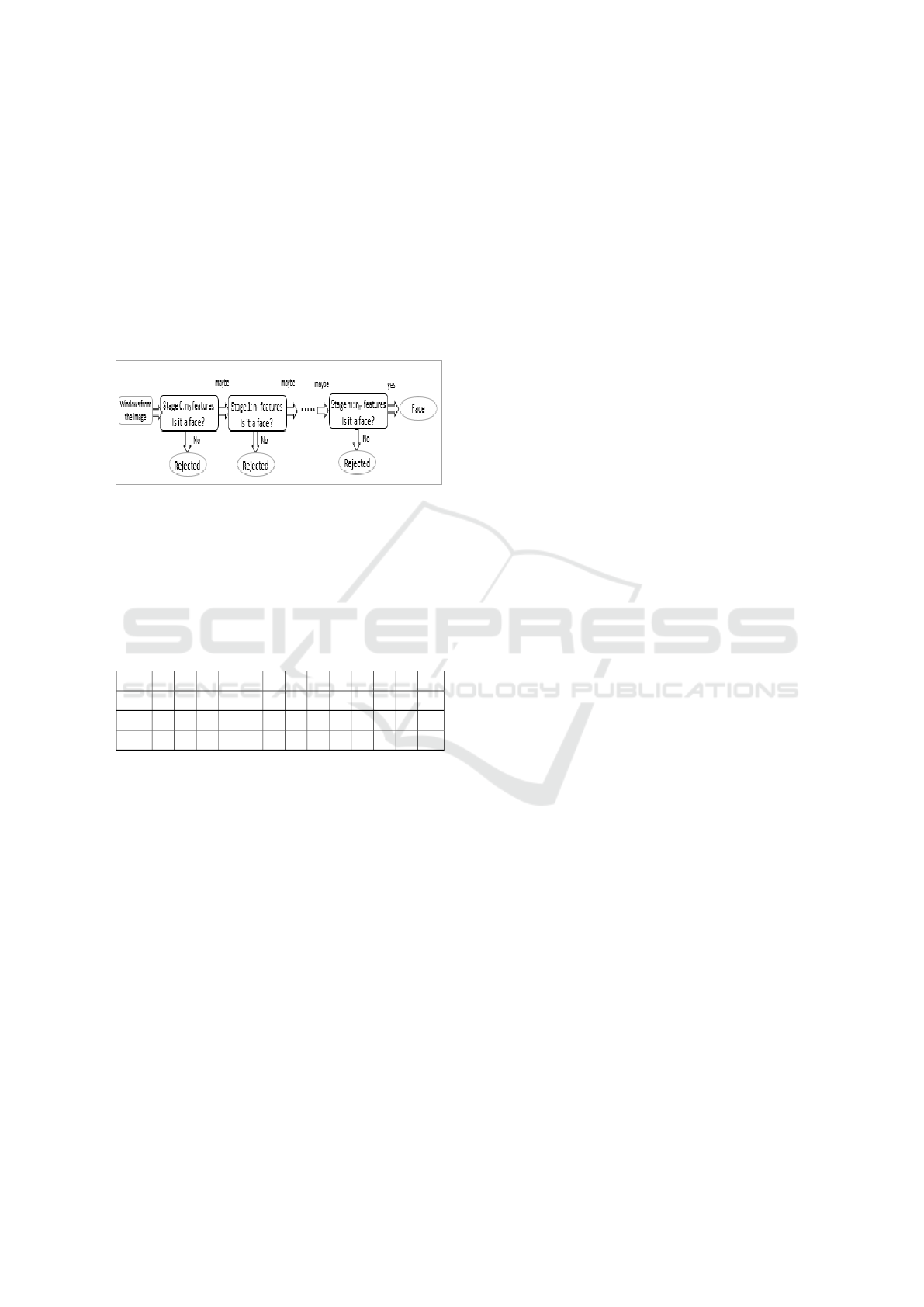
3.1.4 Cascade Classifier
The cascade classifier is generated during the training
phase and used in the detection phase. During the
detection, a sub-window scanned the image and tried
at each step to determine if the current window could
be a face. To ensure that each window should pass
through the pre-trained cascade classifier. Efficient
cascade classifier constructed to reject the maximum
of the negative windows at early stages to reduce the
computation time (figure 2).
Figure 2: A cascade classifier.
Because the focus of this paper is the parallel ac-
celeration of the face detection process, we obtain
the classifier not by self-training, but by using the
OpenCV open-source software (OpenCV, ). The clas-
sifier has 2913 features divided into 25 stages (Table
1), with min windows size of 25x25.
Table 1: The used cascade classifier.
stages 0 1 2 3 4 5 6 7 8 9 10 11 12
features 9 16 27 32 52 53 62 72 83 91 99 115 127
stages 13 14 15 16 17 18 19 20 21 22 23 24 total
features 135 136 137 159 155 169 196 197 181 199 211 200 2913
4 PROPOSED ALGORITHM
This section describes our optimized face detection
algorithms based on an efficient parallel implementa-
tion using CUDA and integrating of RGB and YCbCr
color spaces to reduce the research area. Before that,
the single-threaded version is presented to make the
algorithm clear and for comparison reasons.
4.1 Sequential Algorithm
Face detection implementation comprises 4 main
steps: 1) resizing of the original image into a pyra-
mid of images at different scales 2) calculating the in-
tegral images for fast feature evaluation, 3) Comput-
ing the image coordinates for each Haar feature, and
4) detecting faces using a cascade of classifiers. Fig-
ure 3 shows the overall flow of the data. The process
starts with reading the input image and loading the
cascade classifier. After that, the image is converted
to grayscale and the new height and width are cal-
culated to resize the image. The algorithm consists of
resizing the image with scale factor 1 for the first time
than with a predefined scale factor, until the image is
equal or smaller than the detection windows 25x25
(the size obtained from the used classifier), in our case
the scale factor is 1,2. Each time the image is resized,
we transform it into an integral image format and we
also calculate the integral image of the square root of
the intensities of the pixels to accelerate the further
calculation. The next step is to compute the image
coordinates for each Haar feature, these are the rel-
ative positions of each Haar rectangle boundary in a
25x25 window. For a shifted position of the detection
window, the shifted offset is added to get the new co-
ordinates. After that, the window passes through the
stages of the cascade classifier. At each stage, if the
integral sum is less than the threshold, this window
is rejected. Otherwise, the window passes to the next
stage. If it completes all the stages then it is stored as
a face. Then the window is shifted by a step of one
pixel and passed through the cascade classifier. When
the window scans all the image, the image is resized
again and processed through the same steps until the
condition is satisfied. Finally, the stored faces are in-
dicated by a circle around them in the original image.
4.2 GPGPU Implementation
The proposed research work is the detection of multi-
ple human faces from images with different sizes us-
ing Haar-features and cascade classifier, employing
skin color pre-treatment for search space reduction
and GPU acceleration for faster processing.
In this section, we introduce some of the main
ideas for parallelizing face detection exploiting both
CPU and GPU. First of all, when the image is loaded
it is directly transformed into grayscale and save to the
GPU global memory. The GPU doesn’t transfer the
result to avoid the communication overhead. The cas-
cade classifier is also saved to the GPU global mem-
ory as multiple vectors, for example, one for the num-
ber of features in each stage, one for all the rectangles
coordinate and anther one for the threshold. This part
of the algorithm is handled by the CPU. The parts that
can be parallelized in this algorithm are image resiz-
ing, integral image computation, the compute of im-
age coordinates for each Haar feature and scanning
the image and processing each window by the cas-
cade classifier. In what follows, we explain each one
separately.
An Efficient GPGPU based Implementation of Face Detection Algorithm using Skin Color Pre-treatment
577
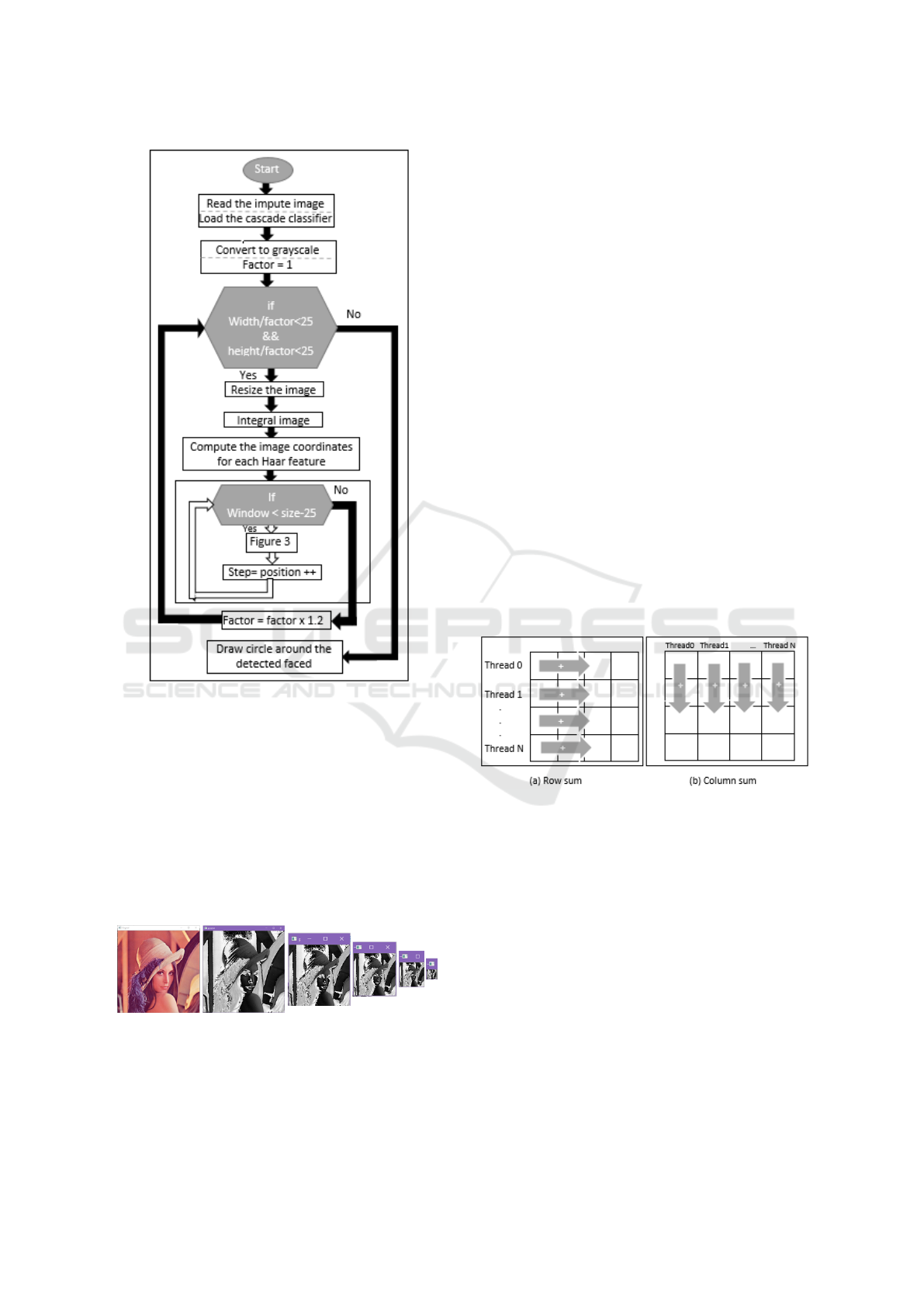
Figure 3: The face detection algorithm.
4.2.1 Image Resizing
Since the size of faces in the image could be variante
and the detection window is stable (25x25), the im-
age should be resized until it is equal to the detection
window size. for that, we use the nearest neighbor
algorithm to create a pyramid of images at different
scales (figure 4). The nearest neighbor is the simplest
and fastest implementation of the image scaling tech-
nique (Jiang and Wang, 2015). It is very useful when
speed is the primary concern.
Figure 4: Image pyramid.
In this step the image width and height are down-
scaled by a factor of 1.2, in order to ensure that, we
need to create a new image and compute both the hor-
izontal and vertical ratios between the original image
and the new image, after that, we delete redundant
pixels based on these ratios. After analyzing the al-
gorithm we can see that computing is independent, so
we can map each pixel position to be fetched by a
single thread. The total number of threads should be
equal to the new image (width x height).
4.2.2 Integral Image
After image resizing, we have to compute the inte-
gral image, which is computationally expensive, es-
pecially for large images, because the value of each
pixel is the sum of all the pixels above and to the left
of it. To parallelize this step we have to remove the
dependency between data. The main idea is to split
the algorithm into 2 parts (Figure 5), the first is the
sum of each row independently of others and the sec-
ond is the sum of the columns. For that, we need as
much thread as the number of rows, and we have to
create a vector to hold the intermediate image. Here,
each thread processes each row separately, it adds the
previous pixel value, to the current pixel value along
that row.The vertical sum computation is done on the
output of the horizontal sum computation. It is similar
to the horizontal sum; however, the threads compute
the sum over the columns. The results are saved in a
new image.
Figure 5: Image integral computation.
Similarly, we compute the integral sum of the
squared pixel values, that we need to calculate the
variance of the pixels for the Haar rectangle coordi-
nates, in the Cascade classifier stage. We calculate the
integral image and the integral image of the squared
pixel at the same time since they use the same data.
4.2.3 Preparing the Image Coordinates
Next, we compute the image coordinates for each
Haar feature, and these are the relative positions of
each HAAR rectangle boundary in a (25x25) win-
dow. This calculation is a preparation for the next
step when we shift the detection window. We will
just need to shift the offset to get the new coordinates.
The cascade classifier contains a 2913 feature each of
which has 3 rectangles. We processed each feature
ICSOFT 2020 - 15th International Conference on Software Technologies
578

separately, which means that each thread will process
3 rectangles.
4.2.4 Scanning the Image
In order to carry the detection, in the last step, we have
to place a detection window (25x25) over the output
of the previous step. We process through the cascade
classifier, then we slide the window to the next po-
sition, until the end of the image. The cascade clas-
sifier processing can’t be split because at each stage,
if the window is rejected there is no need to process
the rest, so this part should be done together. How-
ever, each window computation is independent of the
others. For that, each scan window is processed inde-
pendently. Hence, one thread is assigned to process a
scan window.
This is the simple parallel implementation of the
algorithm. In the following, we will present the opti-
mization added to accelerate the process.
4.3 Optimization
The objective of parallel computing is to reduce the
calculation time of a process. The GPU architectures
are increasingly used for that purpose. To exploit the
GPU performance it is essential to know the proper-
ties of the hardware architecture. The efficiency of an
algorithm implemented on a GPU is related to how
the available resources are used. In this subsection,
we will introduce the optimizations and how to ex-
ploit the resources better. In what follows, the op-
timization in each part of the algorithm is explained
separately.
4.3.1 Image Resizing and Sum of Rows
We merge the compute of image resizing and the first
part of the integral image (row sum) in the same ker-
nel, to avoid storing the resized image to global mem-
ory between kernel. In this case, each thread pro-
cesses one row separately, when it computes a pixel
value with the nearest neighbor it adds it to the pre-
vious pixel values and it saves it to an intermediate
vector. To facilitate the next calculations, we save the
values in the column that have the same number as
the computed row, so that in the next step when we
calculate the sum of the column, this latter will be the
row with the same index as the column. We trans-
pose it again after the column sum. This optimization
helps us to avoid global memory access, that could
cost 200-800 clock cycles on an NVIDIA. Therefore,
memory optimization is essential in GPU based par-
allel face detection and it improves processing perfor-
mance.
4.3.2 Sum of Columns
After the end of the first kernel, the result stays in the
GPU global memory. We invoke 2 kernels, the first
for the computation of the sum of columns and the
second for the computation of the sum of the columns
for the square value of pixels. Since we don’t need the
second kernel until the image scanning, we execute it
asynchronously on a different stream, and we left the
first kernel to be treated by the default stream. We left
the second kernel to be executed concurrently with the
kernel that prepares the image coordinates for each
Haar feature. Finally, we synchronize all the kernels
before the image scanning.
4.3.3 Scanning the Image
As we mentioned before (section 4.3.4). In this step,
we process each window with one thread through all
the features of the cascade classifier. These features
are common to all the scan windows; hence we import
them to the shared memory so that they can be visi-
ble to all the threads of the same block and like this,
we can avoid multiple global memory access. Shared
memory has lower latency and higher bandwidth than
global memory, for this we use it to improve the per-
formance. The features need nearly 69 KB of mem-
ory, however, in our case, the used GPU has only 48
KB of shared memory. For this purpose, we decide
to import only the most used features so that we re-
duce as much memory transactions as possible. We
mention here that the newer NVIDIA architecture has
more shared memory, and make the import of all fea-
tures in shared memory possible.
4.3.4 Overlap Data Transfers
The last optimization is to overlap data transfers when
we copy the detected face vector to CPU memory. For
that, we divided the data into multiple chunks. We
execute each chunk on different stream and we copy
the data of each streams separately.
The latter approach was further improved by ap-
plying skin color filtering to reduce the search space.
This skin color filtering will be discussed in the next
section.
4.4 Skin Color Segmentation
Skin color segmentation can be accomplished by
explicitly modeling the skin distribution of certain
color spaces using parametric decision rules (bin Ab-
dul Rahman et al., 2007). A literature survey shows
that different color spaces are applied for skin color
analysis. In most cases, the default color space is the
An Efficient GPGPU based Implementation of Face Detection Algorithm using Skin Color Pre-treatment
579

well-known RGB, which is composed of three pri-
mary colors, red, green and blue. The variations in
skin color pixels due to illumination levels are mini-
mized when utilizing the RGB color-space. However,
due to intermixed chrominance (color information)
and luminance (brightness measurement), it is least
recommended for color tone analysis (Shifa et al.,
2020). Another well used color space is YCbCr. In
this space, the intensity of light is represented by lu-
minance (Y) and chrominance is found by calculat-
ing the blue (Cb) and red (Cr) differences relative to
luminance. The experimental result of (Shaik et al.,
2015) shows that YCbCr color space can be applied
for complex color images with uneven illumination.
In the case of real scenario, illumination varia-
tion remains a challenging task. For this, we utilize
the additional luminance and chrominance informa-
tion of the image on top of standard RGB properties
to improve the skin pixels segmentation. We used the
RGB boundary rules introduced by (bin Abdul Rah-
man et al., 2007) (equation 4) and the suitable ranges
of YCbCr introduced by (Saikia et al., 2012) (equa-
tion 5). Equation 6 presents the combination to detect
skin color, the other pixels are colored by the black
color. The results are shown in figure 6, where (a)
is the original image, (b) is the skin color segmented
image and (c) is the gray scale of (b).
The skin colour at uniform daylight illumination rule
is defined in RGB as:
(R > 95) AND (G > 40) AND (B > 20) AND
(max{R, G, B} − min{R, G, B} > 15) AND
(|R − G| > 15) AND (R > G) AND (R > B) (4a)
while the skin colour under flashlight or daylight lat-
eral illumination rule in RGB is given by:
(R > 220) AND (G > 210) AND (B > 170) AND
(|R − G| ≤ 15) AND (R > B) AND (G > B) (4b)
(4a) OR (4b) (4)
77 ≤ Cb ≤ 127 AND 133 ≤ Cr ≤ 173 (5)
(4) OR (5) (6)
In (Vansh et al., 2020), an improved face detec-
tion approach was proposed using YCbCr color space
and Viola-Jones algorithm. They state that detection
time was a little longer than a simple Viola-Jones al-
gorithm, however, the detection rate was increased. In
this paper, we focus on the parallelization of the algo-
rithm to improve the speed of detection and we add
the skin color pre-treatment to increase the detection
rate and minimizing the treated area in order to im-
prove the speed. In the proposed method we add a
(a) (b)
(c)
Figure 6: Example of skin color segmentation.
treatment, after the integral image calculation, to se-
lect only the pixels that had skin color to be processed
by the cascade classifier.
For smaller images, since the face size may be less
than (25x25), we used the nearest neighbor algorithm
to scale up the image size before starting the previ-
ously described algorithm. We found that adding the
scaling up can improve the detection rate by a factor
of 1.27x on the small image.
An overview of our optimized CUDA implemen-
tation is presented in Figure 7.
5 EXPERIMENTATION AND
DISCUSSION
5.1 Experimental Setup
The proposed method was developed and tested on
Intel
R
Core
TM
i5 2.30 GHz loaded with Windows
10 (64 bit) and NVIDIA graphics processing unit
GeForce 920MX. The development and testing have
been done in Microsoft Visual Studio 14.0.25431.01.
The CUDA files are compiled by the CUDA compiler
of Release 10.1, 10.1.168 with the architecture sup-
port corresponding to compute capability 5.0.
The detection time is related to five factors: the
size of the image, the number of features in the clas-
sifiers, the step of scanning, the resizing scale and the
hardware platform (Wei and Ming, 2011). In addi-
tion, the number of faces in the image affects the de-
tection time. In this work, we maintain the classifier,
the step of scanning, scaling factor and hardware plat-
ICSOFT 2020 - 15th International Conference on Software Technologies
580
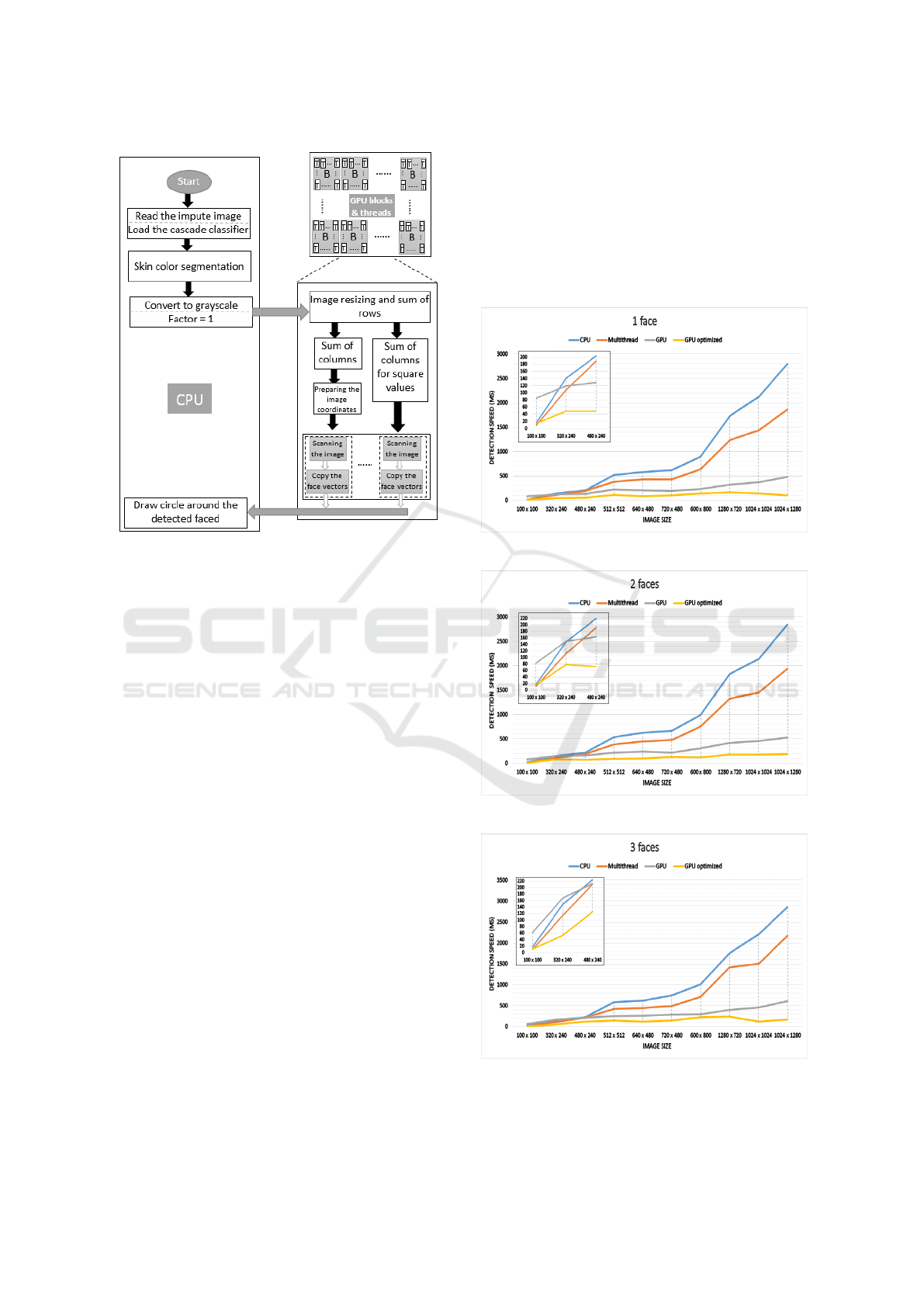
Figure 7: Our optimized CUDA based face detection algo-
rithm.
form unchanged, and compute the acceleration of our
system. However, we were not able to find any pub-
licly available databases contain color images with
different sizes and a variant number of faces. So in
order to evaluate the performance of the final face de-
tection algorithm, the considered database is instead a
collection of 700 images taken from the web. The col-
lected database contains frontal face images in color
with 10 different sizes (100x100, 320x240, 480x240,
512x512, 640x480, 720x480, 600x800, 1280x720,
1024x1024, 1024x1280), that are grouped by the
number of faces, 7 different types were distinguished
(1, 2, 3, 4, 5, 6-9, ≥10 faces), with 10 images for each
size and for each number of faces.
5.2 Results and Discussion
Our experiments are based on the comparison of
our proposed solution and several implementations of
Viola-Jones: the sequential one, multithreaded and
Cuda GPU based. The results show that our solu-
tion decrease the detection time, increase the detec-
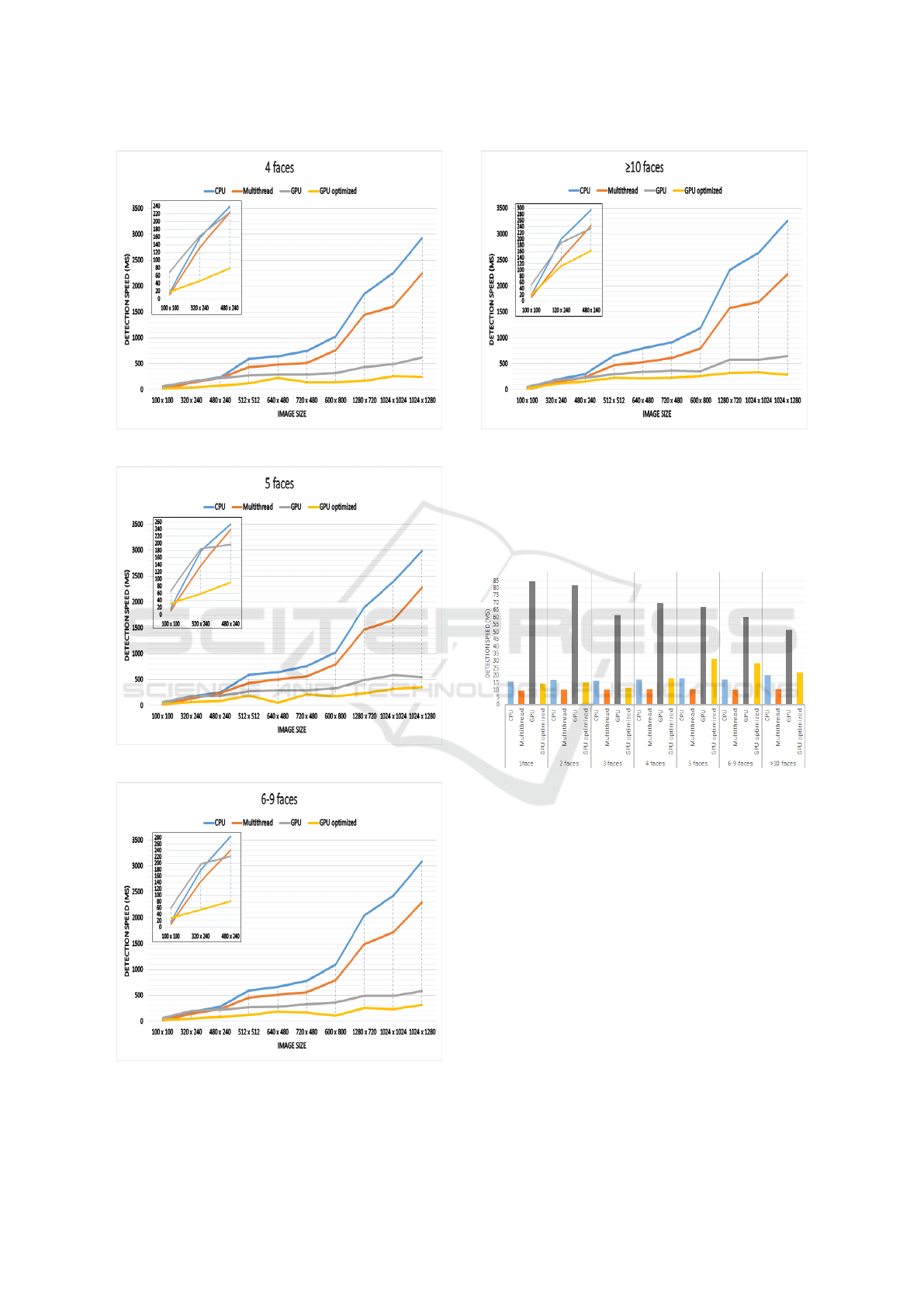
tion rate and eliminates the false positive rate. Fig-
ure 8 shows the graphical results of our face detection
(all the results details are given in table 2). The pre-
viously presented database (section 5.1) was used for
the testing of the detector. Each figure presents the ex-
ecution time, according to the number of faces for the
different algorithms (sequential, multithreaded, GPU
and our optimized algorithm). At the top left of the
figures, we zoomed the execution times of the small
image sizes, in order to make them clearer.
According to the figures, we distinguish 2 differ-
ent cases, the first for small size images and the sec-
ond for big size images.
Figure 9 presents the detection time for the smaller
size images. The Multithreaded version gives a better
result than that of the CPU single-threaded and GPU.
(a)
(b)
(c)
Figure 8: The detection time for all image sizes.
An Efficient GPGPU based Implementation of Face Detection Algorithm using Skin Color Pre-treatment
581
(d)
(e)
(f)
Figure 8: The detection time for all image sizes. (cont.).
(g)
Figure 8: The detection time for all image sizes. (cont.).
We notice that the GPU detection time increase for
the small images. However, our optimized algorithm
offers nearly the same execution time as the CPU ver-
sion.
Figure 9: Detection time for small images (100x100).
For bigger size images, we notice that the GPU detec-
tion time is better than that of the CPU, and the space
between their representation getting bigger with im-
age size increases. From figures 8, it is obvious that
our algorithm outperforms the CPU single-threaded
and multithreaded versions and even the GPU version.
The performance of the proposed CUDA opti-
mized algorithm with and without skin color filter-
ing has been compared with that of the sequential
and multithreaded implementation. Table 2 summa-
rizes the detection time in ms for all the previously
described implementations. As per the implemented
results, it has been observed that the optimized GPU
is better than the CPU version in most of the cases.
In the first experiment, we measured the process-
ing time of sequential and multithreaded versions. we
found that the multithreaded version can accelerate
ICSOFT 2020 - 15th International Conference on Software Technologies
582
Table 2: The detection time for the different implementations on the created dataset.
size 100 x 100 320 x 240 480 x 240 512 x 512 640 x 480 720 x 480 600 x 800 1280 x 720 1024 x 1024 1024 x 1280
1 face
CPU 16.20 140.93 203.55 523.77 581.76 620.68 899.05 1734.41 2119.42 2802.51
Multithread 9.47 109.08 188.83 383.07 431.76 435.53 644.81 1236.44 1434.50 1860.77
GPU 84.93 119.24 128.43 222.1 203.77 191.95 235.33 319.97 374.88 480.83
GPU optimized 14.41 48.54 49.21 111.83 79.74 98.73 140.89 167.44 143.61 103.41
2 faces
CPU 16.70 147.69 219.18 542.80 623.4 663.11 998.03 1828.85 2140.54 2845.46
Multithread 10.4 112.58 191.63 393.67 444.73 478.29 757.68 1324.35 1454.53 1940.97
GPU 81.84 149.27 163.65 221.3 239.08 217.21 304.6 414.76 456.39 528.12
GPU optimized 15.4 77.56 71.76 87.84 102.53 132.64 117.92 183.97 178.96 193.94
3 faces
CPU 16.65 148.94 224.54 586.58 625.12 744.6 1010 1754.41 2206.9 2863.15
Multithread 10.41 114.32 210.80 428.55 446.43 495.34 710.22 1417.58 1508.11 2176.85
GPU 61.54 167.57 212.71 251.96 259.69 283.91 301.24 400.17 457.7 610.65
GPU optimized 11.65 53.19 125.94 143.14 118.09 141.26 227.39 238.65 126.52 171.61
4 faces
CPU 17.35 158.79 239.24 594.14 641.03 747.02 1022.28 1851.67 2255.01 2930.95
Multithread 10.77 132.98 222.96 435.97 483.91 512.15 759.30 1440.53 1606.86 2242.37
GPU 69.87 162.35 223.72 276.56 293.9 301.17 314.22 438.56 492.47 621.82
GPU optimized 17.93 46.18 78.85 124.47 221.31 140.52 142.46 165.28 259 249.18
5 faces
CPU 17.99 178.03 254.61 595.34 646.07 762.86 1026.78 1901.63 2396.42 2987.78
Multithread 11.01 137.97 239 438.07 510.40 562.95 789.87 1462.99 1657.34 2280.72
GPU 67.27 185.1 196.11 267.15 295.64 299.49 333.74 491 581.57 547.61
GPU optimized 31.33 59.06 89.98 197.4 55.99 219.45 184.51 233.79 316.75 354.17
6-9 faces
CPU 17.24 179.41 284.42 601.1 671.13 778.42 1092.92 2048.3 2426.02 3092.29
Multithread 10.45 142.27 240.91 455.25 511.16 563.37 792.50 1494.26 1719.13 2304.84
GPU 60.47 198.03 221.98 268.34 281.88 325.62 363.74 489.09 486.2 589.29
GPU optimized 28.41 53.79 80.65 125.9 194.58 171.82 114.02 256.24 237.87 316.64
≥10 faces
CPU 19.97 199.6 295.38 661.58 793.43 913.5 1195.36 2306.87 2637.04 3259.85
Multithread 11.04 136.12 244.78 468.06 530.52 609.14 796.13 1577.59 1697.14 2223.2
GPU 51.48 188.17 235.01 296.11 351.4 366.53 361.85 583.5 574.23 650.47
GPU optimized 22 112.13 163.53 235.32 214.39 227.85 262.03 320.03 329.92 293.54
the execution by a factor up to 1.81x. However, the
improvement isn’t enough for realistic scenarios. We
notice that the detection time is increasing with the
rise of image size and the number of faces. After that,
a GPU CUDA based version was implemented. For
smaller images, we notice that the detection time was
increased. Despite this, for the bigger sizes, the sim-
ple GPU implementation is faster than CPU imple-
mentations by a factor up to 5.83x. Since the GPU
version still not that much faster and suffers when we
use small images, an optimized version was imple-
mented. For smaller images, the detection time be-
comes so near to that of the CPU versions. The im-
provement is 27.1x compared to the CPU version.
Although, it is important for a face detection al-
gorithm to be fast, however, it is not the only factor
to measure its efficiency. The detection rate and false
positive are also important. First, for the GPU ver-
sion, we achieved a detection rate of 91.35% with 15
false positives. In the GPU optimized version with
the skin color segmentation, since only skin pixels
are treated, the false positive is reduced to zero and
the detection rate is 97.05%. With the use of sta-
ble parameters, it is obvious that our proposed imple-
mentation outperforms those of the literature. How-
ever, there is still a possibility of improvement, with
a better cascade classifier and more amount of shared
memory that exists in newer NVIDIA architecture.
6 CONCLUSIONS
Face detection is a classical computationally-
intensive problem. In this paper, we solve this compu-
tationally intensive problem on an NVIDIA GPGPU
using the CUDA parallel computing language. We
propose a real-time optimized and robust GPGPU im-
plementation of face detection algorithm using the
RGB and YCbCr spaces of color to select the skin
color pixel on which the detection is applied in order
to reduce the research area. To evaluate our method,
we created a database of 700 color images that con-
tain different sizes and face numbers. We achieved
an average of 27.1x acceleration over the CPU imple-
mentation. In order to increase the detection rate for
the smaller images, we increased the size before treat-
ment. This scaling-up increases the detection rate by
a factor of 1.27x. With the use of skin color segmen-
tation and small images scaling up, we could increase
An Efficient GPGPU based Implementation of Face Detection Algorithm using Skin Color Pre-treatment
583

the detection rate to 97.05% and we get rid of the false
positive. We believe that with a more robust classifier
and more optimizations, we can still achieve a better
speedup. Then, we will focus on the creation of a ro-
bust classifier and the optimization of the implemen-
tations to overcome the execution overhead caused by
the number of faces. In addition, our challenge is to
approve the efficiency of our approach regardless of
the hardware platform used.
REFERENCES
Bhutekar, S. J. and Manjaramkar, A. K. (2014). Parallel
face detection and recognition on gpu. International
Journal of Computer Science and Information Tech-
nologies, 5(2):2013–2018.
Bilaniuk, O., Fazl-Ersi, E., Laganiere, R., Xu, C., Laroche,
D., and Moulder, C. (2014). Fast lbp face detection
on low-power simd architectures. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition Workshops, pages 616–622.
bin Abdul Rahman, N. A., Wei, K. C., and See, J. (2007).
Rgb-h-cbcr skin colour model for human face detec-
tion. Faculty of Information Technology, Multimedia
University, 4.
Chouchene, M., Sayadi, F. E., Bahri, H., Dubois, J., Mit-
eran, J., and Atri, M. (2015). Optimized parallel im-
plementation of face detection based on gpu compo-
nent. Microprocessors and Microsystems, 39(6):393–
404.
Devrari, K. and Kumar, K. V. (2011). Fast face detec-
tion using graphics processor. International Journal
of Computer Science and Information Technologies,
2(3):1082–1086.
Fayez, M., Faheem, H., Katib, I., and Aljohani, N. R.
(2016). Real-time image scanning framework using
gpgpu-face detection case study. In Proceedings of the
International Conference on Image Processing, Com-
puter Vision, and Pattern Recognition (IPCV), page
147. The Steering Committee of The World Congress
in Computer Science, Computer . . . .
Hefenbrock, D., Oberg, J., Thanh, N. T. N., Kastner, R.,
and Baden, S. B. (2010). Accelerating viola-jones
face detection to fpga-level using gpus. In 2010
18th IEEE Annual International Symposium on Field-
Programmable Custom Computing Machines, pages
11–18. IEEE.
Jain, V. and Patel, D. (2016). A gpu based implementation
of robust face detection system. Procedia Computer
Science, 87:156–163.
Jeong, J.-c., Shin, H.-c., and Cho, J.-i. (2012). Gpu-based
real-time face detector. In 2012 9th International
Conference on Ubiquitous Robots and Ambient Intel-
ligence (URAI), pages 173–175. IEEE.
Jiang, N. and Wang, L. (2015). Quantum image scaling
using nearest neighbor interpolation. Quantum Infor-
mation Processing, 14(5):1559–1571.
Khan, M. A., Shaikh, M. K., bin Mazhar, S. A., Mehboob,
K., et al. (2017). Comparative analysis for a real time
face recognition system using raspberry pi. In 2017
IEEE 4th International Conference on Smart Instru-
mentation, Measurement and Application (ICSIMA),
pages 1–4. IEEE.
Kong, J. and Deng, Y. (2010). Gpu accelerated face detec-
tion. In 2010 International Conference on Intelligent
Control and Information Processing, pages 584–588.
IEEE.
Li, E., Wang, B., Yang, L., Peng, Y.-t., Du, Y., Zhang, Y.,
and Chiu, Y.-J. (2012). Gpu and cpu cooperative ac-
celaration for face detection on modern processors. In
2012 IEEE International Conference on Multimedia
and Expo, pages 769–775. IEEE.
Meng, R., Shengbing, Z., Yi, L., and Meng, Z. (2014).
Cuda-based real-time face recognition system. In
2014 Fourth International Conference on Digital In-
formation and Communication Technology and its Ap-
plications (DICTAP), pages 237–241. IEEE.
MRF (2019). Biometric in government market
research report - global forecast til 2025.
page 195. MARKET RESEARCH FUTURE.
https://www.marketresearchfuture.com/reports/
biometrics-government-market-8035.
Mutneja, V. and Singh, S. (2018). Gpu accelerated face
detection from low resolution surveillance videos us-
ing motion and skin color segmentation. Optik,
157:1155–1165.
Mutneja, V. and Singh, S. (2019). Modified viola–jones al-
gorithm with gpu accelerated training and parallelized
skin color filtering-based face detection. Journal of
Real-Time Image Processing, 16(5):1573–1593.
Nguyen, T., Hefenbrock, D., Oberg, J., Kastner, R., and
Baden, S. (2013). A software-based dynamic-warp
scheduling approach for load-balancing the viola–
jones face detection algorithm on gpus. Journal of
Parallel and Distributed Computing, 73(5):677–685.
OpenCV. [Online]. https://sourceforge.net/projects/
opencvlibrary/.
Oro, D., Fern
´
andez, C., Saeta, J. R., Martorell, X., and
Hernando, J. (2011). Real-time gpu-based face de-
tection in hd video sequences. In 2011 IEEE Inter-
national Conference on Computer Vision Workshops
(ICCV Workshops), pages 530–537. IEEE.
Oro, D., Fern’ndez, C., Segura, C., Martorell, X., and Her-
nando, J. (2012). Accelerating boosting-based face
detection on gpus. In 2012 41st International Confer-
ence on Parallel Processing, pages 309–318. IEEE.
Patidar, S., Singh, U., Patidar, A., Munsoori, R. A., and
Patidar, J. (2020). Comparative study on face de-
tection by gpu, cpu and opencv. Lecture Notes on
Data Engineering and Communications Technologies,
44:686–696.
Saikia, P., Janam, G., and Kathing, M. (2012). Face de-
tection using skin colour model and distance between
eyes. International Journal of Computing, Communi-
cations and Networking, 1(3).
Shaik, K. B., Ganesan, P., Kalist, V., Sathish, B., and
Jenitha, J. M. M. (2015). Comparative study of skin
ICSOFT 2020 - 15th International Conference on Software Technologies
584

color detection and segmentation in hsv and ycbcr
color space. Procedia Computer Science, 57(12):41–
48.
Sharma, B., Thota, R., Vydyanathan, N., and Kale, A.
(2009). Towards a robust, real-time face processing
system using cuda-enabled gpus. In 2009 Interna-
tional Conference on High Performance Computing
(HiPC), pages 368–377. IEEE.
Shifa, A., Imtiaz, M. B., Asghar, M. N., and Fleury, M.
(2020). Skin detection and lightweight encryption for
privacy protection in real-time surveillance applica-
tions. Image and Vision Computing, 94:103859.
Sun, L.-c., Zhang, S.-b., Cheng, X.-t., and Zhang, M.
(2013). Acceleration algorithm for cuda-based face
detection. In 2013 IEEE International Conference
on Signal Processing, Communication and Comput-
ing (ICSPCC 2013), pages 1–5. IEEE.
Tek, S. C. and G
¨
okmen, M. (2012). Gpu accelerated real-
time object detection on high resolution videos using
modified census transform. In VISAPP International
Conference on Computer Vision Theory and Applica-
tions, pages 685–688.
Vansh, V., Chandrasekhar, K., Anil, C., and Sahu, S. S.
(2020). Improved face detection using ycbcr and ad-
aboost. In Computational Intelligence in Data Min-
ing, pages 689–699. Springer.
Viola, P. and Jones, M. (2001). Robust real-time face detec-
tion. In null, page 747. IEEE.
Wai, A. W. Y., Tahir, S. M., and Chang, Y. C. (2015). Gpu
acceleration of real time viola-jones face detection. In
2015 IEEE International Conference on Control Sys-
tem, Computing and Engineering (ICCSCE), pages
183–188. IEEE.
Wei, G. and Ming, C. (2011). The face detection system
based on gpu+ cpu desktop cluster. In Intl. Conf. on
Multimedia Technol.(ICMT’11), pages 3735–3738.
Zafeiriou, S., Zhang, C., and Zhang, Z. (2015). A survey
on face detection in the wild: past, present and future.
Computer Vision and Image Understanding, 138:1–
24.
An Efficient GPGPU based Implementation of Face Detection Algorithm using Skin Color Pre-treatment
585
