
Design and Integration of a Dexterous Interface with Hybrid Haptic
Feedback
Florian Gosselin
1a
, Claude Andriot
2
, François Keith
2
, François Louveau
3
, Guillaume Briantais
3
and Pascal Chambaud
1
1
CEA, LIST, Interactive Robotics Laboratory, F-91120 Palaiseau, France
2
CEA, LIST, Interactive Simulation Laboratory, F-91120 Palaiseau, France
3
Haption SA, F-53210 Soulgé-sur-Ouette, France
Keywords: Force Feedback Interface, Haptics, Dexterous, Virtual Reality.
Abstract: Haptic interfaces allow natural physical interactions with virtual environments. By measuring the user’s
movements and providing force feedback, they recreate a physical sense of presence in the virtual world, thus
improving the user’s immersion. These characteristics led to their adoption in various VR applications, e.g.
fitting, training or ergonomic studies. Until recently however, most of the commercially available systems
were equipped with a handle which constraints the simulated movements to the manipulation of tools having
a shape similar to the handgrip. More dexterous devices which do not constraint the hand’s posture are
required to allow for the simulation of more various grasps and fine manipulation. Such interfaces are
currently the subject of intense research, with new products arrived recently on the market. Some of these
devices allow generic force feedback on the fingers thanks to multidirectional actuation. They remain however
complex and cumbersome. To overcome this limitation, some other devices limit the number of actuators.
More compact solutions can be obtained this way, but force feedback is limited to only few directions. In this
paper, we present a different approach. By combining force and local pseudo-force feedback, we aim at
allowing a rich and multidirectional haptic feedback in a light and compact fashion. This paper presents an
innovative haptic glove implementing such hybrid haptic feedback developed for interactions with digital
mock-ups, with details on its main components and its integration in a VR application.
1 INTRODUCTION
A haptic interface is an (often small) interactive robot
usually equipped with one or several end-effectors
manipulated by a user. Its sensors allow measuring
the user’s movements which are in turn used to
control the displacements of an avatar in a virtual
environment. When the user’s avatar is subject to an
external force, generated e.g. when it contacts a
virtual object, the device’s actuators provide a force
feedback which improves the user immersion by
reproducing a physical sense of presence in the virtual
world.
Such devices are designed so as to offer as less
resistance as possible to the user when moving in free
space, hence naturally following his or her
movements, and at the same time to be powerful and
stiff enough to render realistic forces when required.
a
https://orcid.org/0000-0003-3412-8144
This capability to allow natural interactions by
gesture with force feedback in virtual environments
led to their adoption in various VR applications like
for example fitting (i.e. verification of the possibility
to assemble complex systems by reproducing the
required user and parts movements in VR), training in
VR or ergonomic studies (Perret et al., 2013) (Arnaldi
et al. 2018).
Until recently, however, most of the
commercially available haptic interfaces were still
equipped with a handle fixed on the end-effector of
the robot (Massie and Salisbury, 1994) (Conti and
Khatib, 2005). This simple solution is well suited
when simulating an operation performed with a given
tool, for example a scalpel or a drill in surgery or a
screwdriver in a virtual factory. However, they limit
the user’s dexterity and are less adapted when manual
manipulation is required or when several tools with
Gosselin, F., Andriot, C., Keith, F., Louveau, F., Briantais, G. and Chambaud, P.
Design and Integration of a Dexterous Interface with Hybrid Haptic Feedback.
DOI: 10.5220/0009831204550463
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 455-463
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
455

different shapes are used successively. In this case, a
dexterous interface is required.
The design of a dexterous haptic interface is
however an extremely difficult task as the hand is one
of the most complex part of the human body. It has a
large number of moving bodies and joints which
produce complex and coupled movements when
grasping and manipulating objects in many possible
ways (Feix et al., 2009). Moreover, its morphology
and dimensions vary greatly between individuals, and
can even differ between the left and right hands for
the same person. Finally, it is highly sensitive to force
and haptic information. As a consequence, despite
continuous efforts in the field, no haptic interface to
date allows natural interactions in VR with the full
dexterity and sensitivity of the human hand. Different
approaches have been proposed in the literature to
tackle this issue (see for example recent reviews in
(Heo et al., 2012) (Pacchierotti et al., 2017) (Perret
and Vander Poorten, 2018)):
Wearable devices and thimbles are very simple
systems that (at least for some of them) almost
preserve the hand dexterity. They can give a
compelling illusion of some of the phenomena
occurring when one touches a virtual object,
considering e.g. its shape or texture. However,
they cannot block the fingers when grasping an
object, thus limiting the realism of the
interaction as the real world hand configuration
may not be respected.
At the opposite end of the spectrum,
exoskeletons have links and joints similar to the
hand, and (in their most complete and complex
form) they are attached to all the phalanges on
which they can independently apply forces.
They theoretically allow simulating all types of
grasps. Their joints must however therefore be
roughly aligned with the fingers’ ones, which
in turn calls for a user-specific design or at least
tuning. This is not convenient for a universal
VR device that can be used by different users.
Also, they are complex and bulky.
Haptic gloves appear in between these two
extremes. They allow accurately measuring the
hand movements but usually only provide uni-
directional force feedback on the hand closure,
either using traditional motors and cables as in
(Nilsson et al., 2012) or more innovative
solutions like for example electrostatic brakes
as in (Hinchet et al., 2018). Hence they do not
allow simulating the forces occurring when
touching the environment in any arbitrary
direction. Also, like clothing, they must fit the
user’s size and are not universal.
Fingertip devices also lie in between these two
extremes in terms of complexity. Contrary to
exoskeletons, they are linked to the user’s hand
only at the level of the palm and distal
phalanges. As a consequence, they do not allow
simulating power grasps but, despite being
restricted to the simulation of precision grasps,
they can more easily fit different users and their
design is much simpler. When considering
applications mainly focused on precise
manipulation, they constitute an interesting
solution.
This short review demonstrates the interest of
dexterous fingertip interfaces. Such devices are
indeed subject to intense developments at the
moment, with a lot of products recently arrived on the
market or announced, like e.g. Dexta Robotics
Dexmo (www.dextarobotics.com), Senseglove
DK1.2 (www.senseglove.com) or Haption HGlove
(www.haption.com/fr/products-fr/hglove-fr.html).
These interfaces feature between 3 and 5 fingers,
which corresponds to what is required for the
majority of dexterous interactions (Gonzalez et al.,
2014). Indeed, this later reference shows that we
mainly use the distal phalanx of the thumb, index,
middle and ring finger, and the exterior side of the
index when interacting with our environment (these
areas are sufficient to simulate more than 50% of the
tasks performed in the daily life). A four fingers (and
even more a five fingers) interface remains however
complex and potentially cumbersome and heavy. As
a consequence, most of the four or five fingers
devices only integrate 1 actuator per finger (e.g.
Dexmo), acting only against hand closure, and
eventually complemented with a tactile actuator (e.g.
Senseglove). This solution allows for a more simple
and compact design. It does not, however, allow
rendering the forces occurring in other directions.
Therefore, multi-degrees of freedom (DoF) miniature
robots allowing multi-directional force feedback are
needed for each finger. This solution theoretically
allows a realistic rendering of any force on the
fingertips (in a first approximation, a single finger can
apply almost only forces on the environment, torques
being generated by a combined use of several fingers,
and only 3D force feedback is required at the
fingertips). The Haption HGlove is the sole
commercially available solution allowing such 3D
force feedback on the fingertips. It is however
restricted to three fingers. Addressing four or five
fingers would probably lead to a more complex,
cumbersome and heavy solution which would affect
the user’s ability to make abstraction of the interface.
Preserving a natural interaction is however of
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
456

particular importance for fine manipulation, i.e. when
grasping and precisely manipulating small objects.
In this paper, we present a hybrid haptic glove that
introduces several innovations intended to tackle
these limitations. More specifically:
in order to obtain a compelling illusion of a
multi-directional force feedback in a lighter
and more compact fashion than with existing
devices, we propose to combine an under-
actuated fingertip device used to render normal
forces on the distal phalanges with thimble like
local skin deformation systems positioned
under the fingertips to render tangential forces,
to allow for the simulation of the majority of
the targeted activities, we implement this
principle on four fingers,
to allow for the realization of different grasp
types without constraining the fingers’
movements, a redundant and partially coupled
architecture is chosen for each finger’s robot,
links dimensions and shapes are further
optimised to get a light and compact design and
to avoid fingers-robots collisions,
finally, low cost optical sensors are introduced
to measure the movements of the fingers.
Further details on these elements are given in the
following section.
2 DESIGN AND
IMPLEMENTATION OF A
HYBRID HAPTIC GLOVE
2.1 Design Rationale
The dextrous hybrid haptic feedback interface
presented in this paper was developed to address
industrial applications, with a first use case focused
on the maintenance of the battery of electric cars, and
more specifically on training the technicians in charge
of this task. The whole task (i.e. battery disassembly)
duration being much too long (in the order of a few
hours) to be completely simulated, we focused our
attention on some critical steps like the disassembly
of the on-board computing unit and some internal
cables and connectors. These tasks are performed
with both hands using different tools (T-shaped
wrench, clamp,…) or directly with the fingers. In
most cases, only the fingertips are involved, and
almost only the tips of the thumb, index, middle and
ring. To allow for the simulation of these tasks, we
decided to develop two four fingers fingertip haptic
devices, one for the left hand and the other for the
right hand. The other technical design drivers are
those classically used for the design of dexterous
haptic interfaces as summarized in (Gonzalez et al.,
2014): no restriction of fingers’ movements, multi-
DoF haptic feedback on the fingertips, force feedback
in the order of 10N, control stiffness of about
5000N/m. Another constraint was to develop a
solution that is compact and simple enough to be used
by non-specialists.
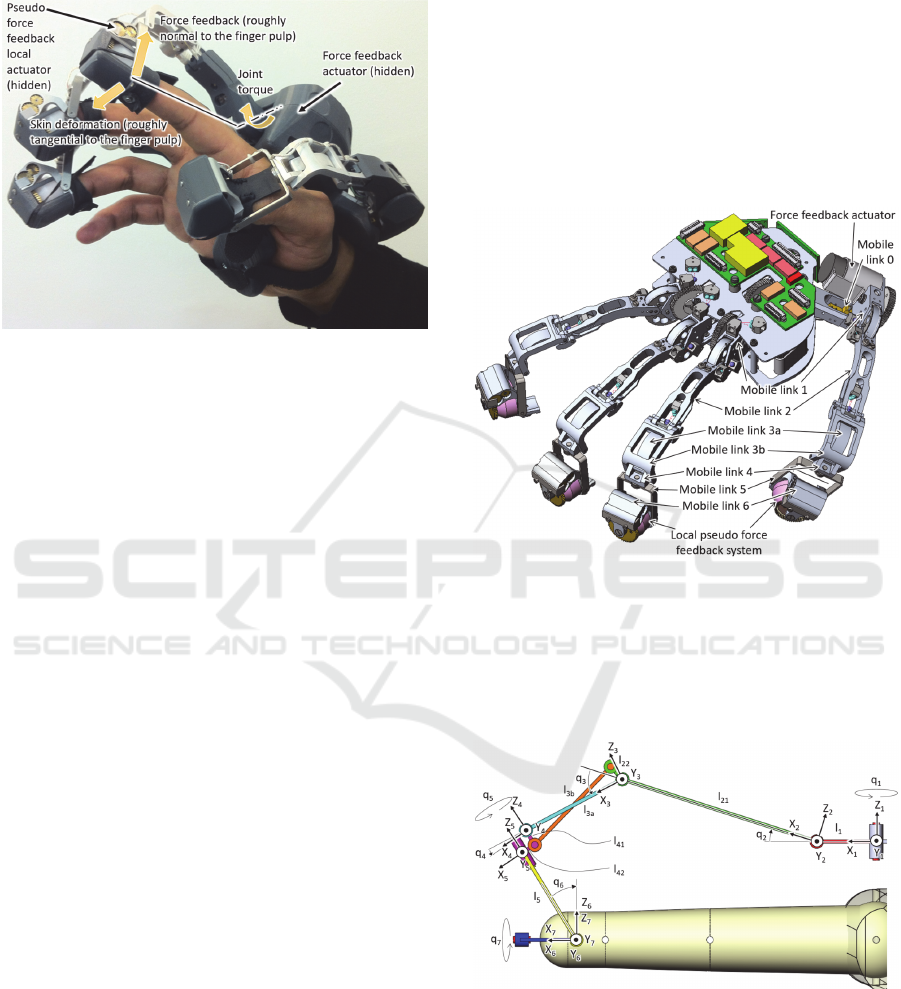
2.2 Overview of the System
The interface developed to answer the above-
mentioned specifications is illustrated in Figure 1. It
is composed of four robots, each of them being
associated with a finger. These robots are linked to a
common basis fixed on the palm. The basis also
serves as a support for motion capture passive targets
that, in association with external cameras, allow
tracking the hand movements (the robots’ sensors
being in charge of the measurement of the movements
of the fingers). It is further connected to a controller
in charge of the management of the different sensors’
signals and of the control of the actuators.
Figure 1: Hybrid haptic feedback glove.
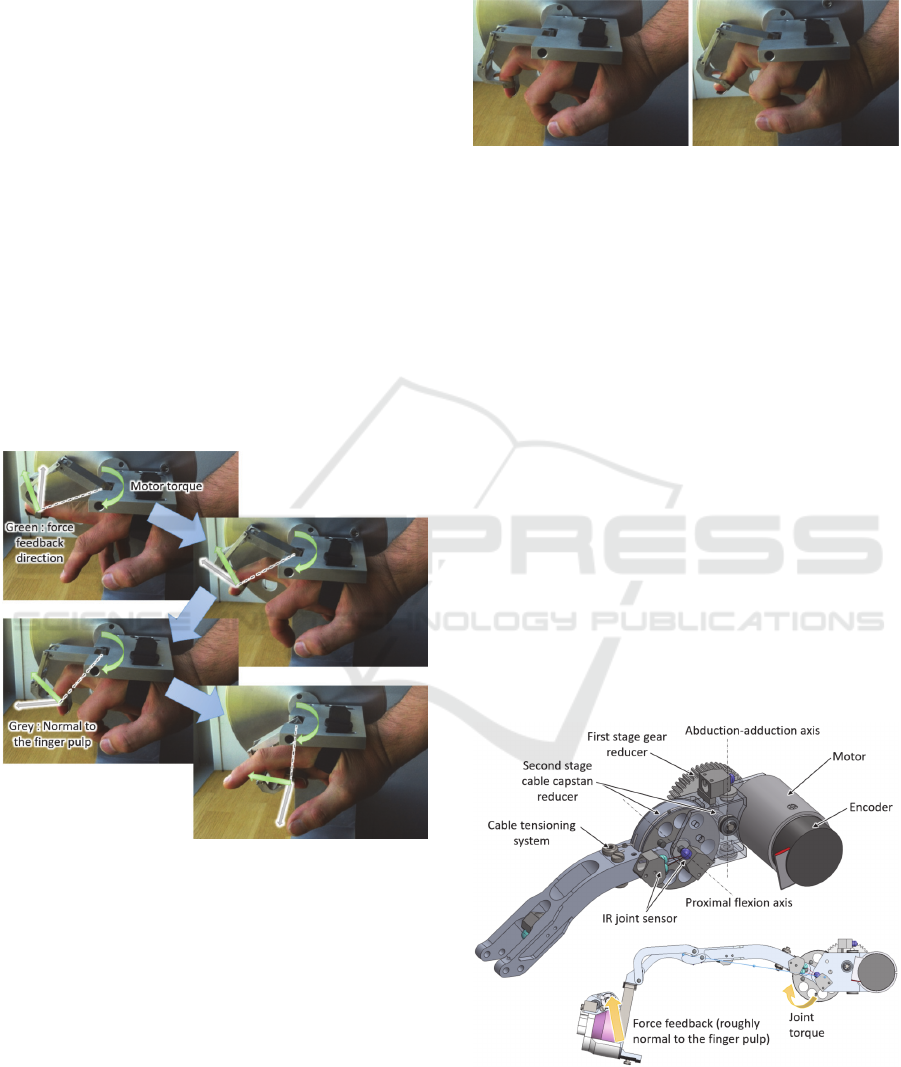
2.3 Hybrid Haptic Feedback Principle
As mentioned before, designing a 4 fingers device
with 3 DoF force feedback on each finger would
result in a complex and bulky system. Fortunately,
local tangential skin deformation systems as for
example in (Girard et al., 2016) can, to some extent,
give the illusion of force feedback to the user yet
without large actuators. Building on this observation,
we propose to implement a solution combining large
actuators able to provide (bi-directional) force
feedback in the direction of the finger flexion-
extension (that is roughly normal to the fingerpad),
and local skin deformation systems using small
Design and Integration of a Dexterous Interface with Hybrid Haptic Feedback
457
actuators able to provide a pseudo force feedback in
the other directions (i.e. tangential to the finger pulp).
Figure 2: Hybrid haptic feedback principle.
The logic behind this choice is the following:
the hand closing force is a function of the
movements of the fingers and it has to be finely
regulated when grasping a rigid or soft object if
one wants to prevent slippage or break (if the
object is fragile),
the forces in the other directions mainly result
from global hand movements (and only little
from movements of the fingers relative to the
palm) which produce local skin deformation
under an external load.
This approach is different from usual solutions
proposed to limit the weight of dextrous haptic
interfaces. It does not replace force feedback
produced by heavy robotic structures with pseudo-
force haptic feedback rendered by wearable interfaces
or thimbles. It neither proposes to implement tactile
feedback in addition to force feedback (as for
example on the Senseglove) in order to increase the
force bandwidth. Here, the pseudo force does not
replace nor come in addition to the force feedback. As
illustrated in Figure 2, it complements it, both acting
in different directions.
2.4 Kinematics
It is of primary importance that dexterous haptic
interfaces allow free movements of the fingers. This
prevents the use of fully coupled architectures
introducing fixed synergies between links as it would
constrain the hand closure movement to follow a
given and fixed trajectory. Yet the device should also
remain compact. This prevents using parallelogram
structures as for example in (Gosselin et al., 2005), or
their serial 2 links equivalent as implemented e.g. on
the Dexmo, as such structures protrude excessively
from the plane of the palm when the hand is opened.
To allow for free fingers’ movements yet
guaranteeing a compact design, we developed a
redundant and partially coupled architecture
composed of 7 links (plus the rotating drum of the
local pseudo force feedback system, see Figure 3).
The same solution is used for all fingers, except an
additional joint and link for the thumb (this
supplementary DoF allows to cope with the thumb’s
internal rotation appearing when the hand is closed).
Figure 3: Redundant and partially coupled robots’
architecture.
The kinematic structure of the index, middle and
ring fingers’ robots is illustrated in Figure 4
(corresponding to links 1 to 6, an additional joint
being added between links 0 and 1 for the thumb):
Figure 4: Kinematic model of the robots. A frame
R
i
=(O
i
,X
i
,Y
i
,Z
i
) is associated with each link, with its origin
positioned on the joint axis, q
i
is the rotation around joint
i
,
and l
i
(resp. l
i1
, l
i2
) designates the length of link i (resp. of
different parts of link i).
With these notations, the kinematic model of the
index, middle and ring robots can be written as
follows:
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
458
T
01
=trans(X
0
,d
x
).trans(Y
0
,d
y
).rot(Z
0
,q
1
) (1)
T
12
=trans(X
1
,l
1
).rot(Y
1
,q
2
) (2)
T
23
=trans(X
2
,l
21
).rot(Y
2
,q
3
) (3)
T
34
=trans(X
3
,l
3a
).rot(Y
3
,q
4
) (4)
T
45
=trans(Z
4
,-l
41
).trans(X
4
,l
42
).rot(Z
4
,q
5
) (5)
T
56
=trans(Z
5
,-l
5
).rot(Y
5
,q
6
) (6)
T
67
=rot(X
6
,q
7
) (7)
Another transformation is required for the thumb.
Equation (1) is then replaced with the following
equations :
T
b0
=trans(X
0
,d
x
).trans(Y
0
,d
y
).
trans(Z
0
,d
z
).rot(Z
0
,q
zb0
).rot(X
b
,q
xb0
) (8)
T
01
=trans(Z
0
,l
0
).rot(Z
0
,q
1
) (9)
Link 1 moves in abduction-adduction while the
other links allow finger flexion-extension. The links
2, 3a, 3b and 4 form an inverted parallelogram which
allows the robot to remain close to the finger in its
entire workspace as shown in Figure 5 (contrary to
parallelograms which protrude excessively from the
plane of the palm when the hand is opened).
Figure 5: Ability of the proposed architecture to remain
close to the finger (image made with a mock-up of the
proposed architecture).
Pivot joints are added at the end of this structure
to allow for the fingertip to rotate freely when the user
closes his or her hand.
The placement of the robots relative to the palm,
the joints’ range of motion and the links’ dimensions
were further optimized in order to allow free
movements of the fingers over their entire workspace.
The resulting dimensions ensure the kinematic
compatibility of the robots with the movements of
human fingers for a medium sized male adult (Hansen
et al., 2018). It also allows closing the hand in
different ways associated with different grasp types
as shown in Figure 6.
Figure 6: Ability to follow different hand closing
trajectories.
It is worth mentioning that, unlike gloves and
exoskeletons whose dimensions are adapted to the
size of the user, fingertip devices can accommodate
different hand sizes. Our device can therefore be used
by various medium-sized users (for smaller and larger
people, we intend in the future to develop several
glove sizes to cope with significantly smaller or larger
hands).
Its main limitation is that, due to under-actuation,
the force feedback direction is not fully controlled. As
shown in Figure 5, it is not always normal to the
finger pulp. When the hand is fully closed, it does no
more constrain the finger that can move freely. Still,
the force is roughly normal to the finger pulp in the
majority of the robot’s range of motion.
2.5 Actuation
Figures 7 and 8 give additional details on the force
feedback actuator (Figure 7) and local pseudo force
actuation system (Figure 8).
Figure 7: Force feedback actuator used to render forces on
the proximal flexion axis.
Design and Integration of a Dexterous Interface with Hybrid Haptic Feedback
459
The force feedback actuator was designed to be
highly transparent and backdriveable yet compact and
light. After the study of different combinations of
actuators and reducers, we selected a Maxon DC
motor (ref. REmax21 221028) and a two stages
reducer combining a first stage gear reducer and a
second stage miniature cable capstan reducer. Such
combination ensures that, even if backlash occurs in
the gear reducer, its amplitude is downscaled at the
output of the cable capstan reducer, making if almost
negligible in practice. This solution allows generating
a continuous joint torque equal to 0.342Nm and a
peak joint torque of 0.974Nm on the proximal flexion
joint. The distance between this joint and the fingertip
varying between 59.9mm and 111.7mm in the
workspace of the robot (about 75mm when the hand
is fully opened), this corresponds to a continuous
force capacity varying between 3N and 5.7N and a
peak force varying between 8.7N and 16.2N (4.5N
continuous and 13N peak when the hand is fully
opened). This is in line with our specifications.
The motor is further equipped with a 512ppt
magneto-optical encoder (ref. Maxon MR 201940).
After interpolation, this corresponds to a resolution
between 0.18 and 0.34mm in the workspace of the
robot. Finally, taking into account the maximum
speed of the actuators, we can guarantee that the
fingers can move at speeds up to 0.6 to 1.2m/s.
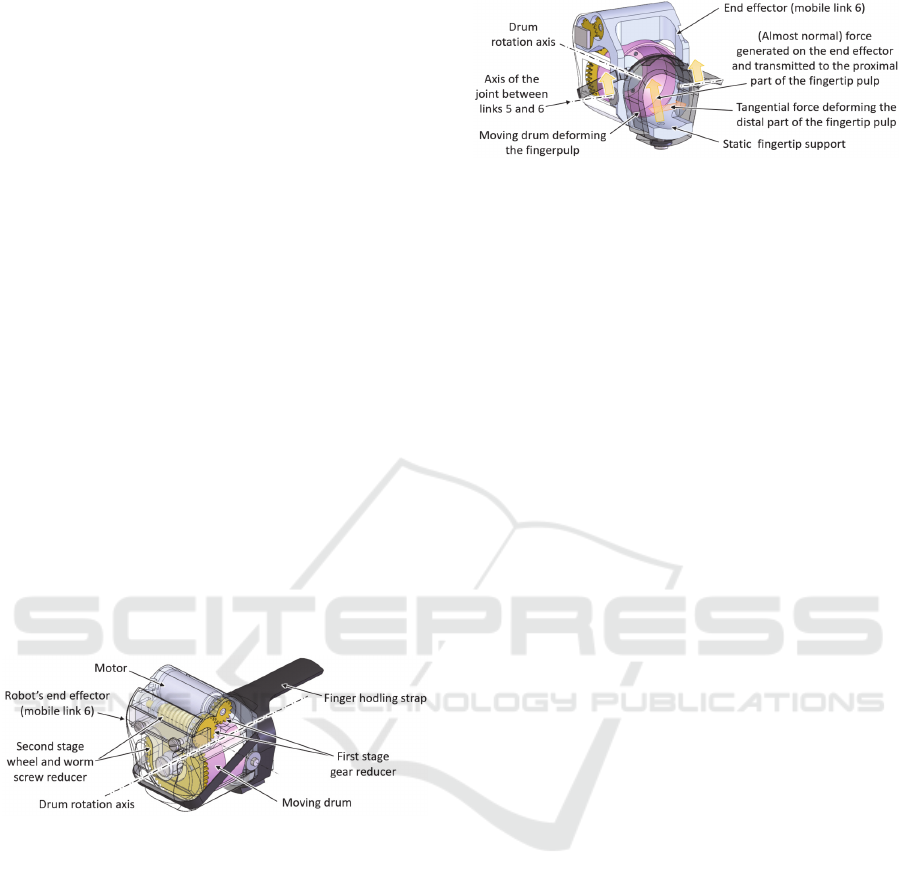
Figure 8: Local pseudo-force actuation system.
The pseudo force actuation system is composed
of a miniature Maxon DC motor (ref. RE8 347727)
associated with a two stages reducer combining a first
stage gear reducer and a second stage wheel and
worm screw reducer. It allows generating a maximum
continuous (resp. peak) torque of 0.0196Nm (resp.
0.0308Nm) that produces a rotation of a moving drum
placed below the distal part of the fingertip pulp
(whose proximal part is supported by a dedicated
support machined on the end effector, see Figure 9).
This torque corresponds to a maximum continuous
(resp. peak) tangential force of 1.96N (resp. 3.08N)
for the index, middle and ring and 1.57N (resp.
2.47N) for the thumb (the thumb’s drum has a larger
diameter). This is theoretically sufficient to deform
the pulp a few millimetres (Gleeson et al., 2010).
Figure 9: 2 DoF haptic feedback on the end-effector.
With this design, haptic feedback can be
generated on the fingertip in two directions (1 DoF
force feedback in flexion-extension plus 1 DoF
pseudo force feedback in abduction-adduction, see
Figure 9). Should haptic feedback be required in three
directions, this local actuation system could easily be
replaced with a 2 DoF solution as proposed for
example in (Girard et al., 2016).
2.6 Hand Posture Measurement
At the time of the development of the glove presented
in this paper, there was no joint sensor commercially
available at a reasonable price that was small enough
to be integrated in the device. As a consequence, we
had to develop a custom solution. The association of
a diode and photodiode, as proposed on the UBN
Hand IV (Palli and Pirozzi, 2011), was judged very
promising. It is cheap and relatively precise.
However, its range of measurement is too limited to
cover the movements of our glove.
To overcome this limitation, we propose to use a
photodiode with a very large viewing angle yet a
relatively constant response over this angle. It is
illuminated with 2 IR diodes in order to increase the
measurement range. The positioning of these
components relative to the joint is optimized to get an
as linear as possible response over a large range of
motion. This arrangement is shown in Figure 7 for the
proximal flexion axis: the photodiode represented in
blue is positioned along the joint axis and the IR
diodes shown in light blue are pointing at its centre.
It is worth noting that, while cheap, this sensor
relies on mass produced components whose response
can vary between samples. To cope with this issue,
we measured the response of 27 emitter-receiver
couples and identified a mean response (see Figure
10). Once calibrated in two points (typically the joints
limits where the angles are precisely known), this
solution gives a relatively linear response over about
60° with an error below 3° which is comparable to the
repeatability of the sensors of the Cyberglove II (see
http://www.cyberglovesystems.com/cyberglove-ii#
specs). The precision is thus judged sufficient for the
accurate capture of the fingers movements.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
460
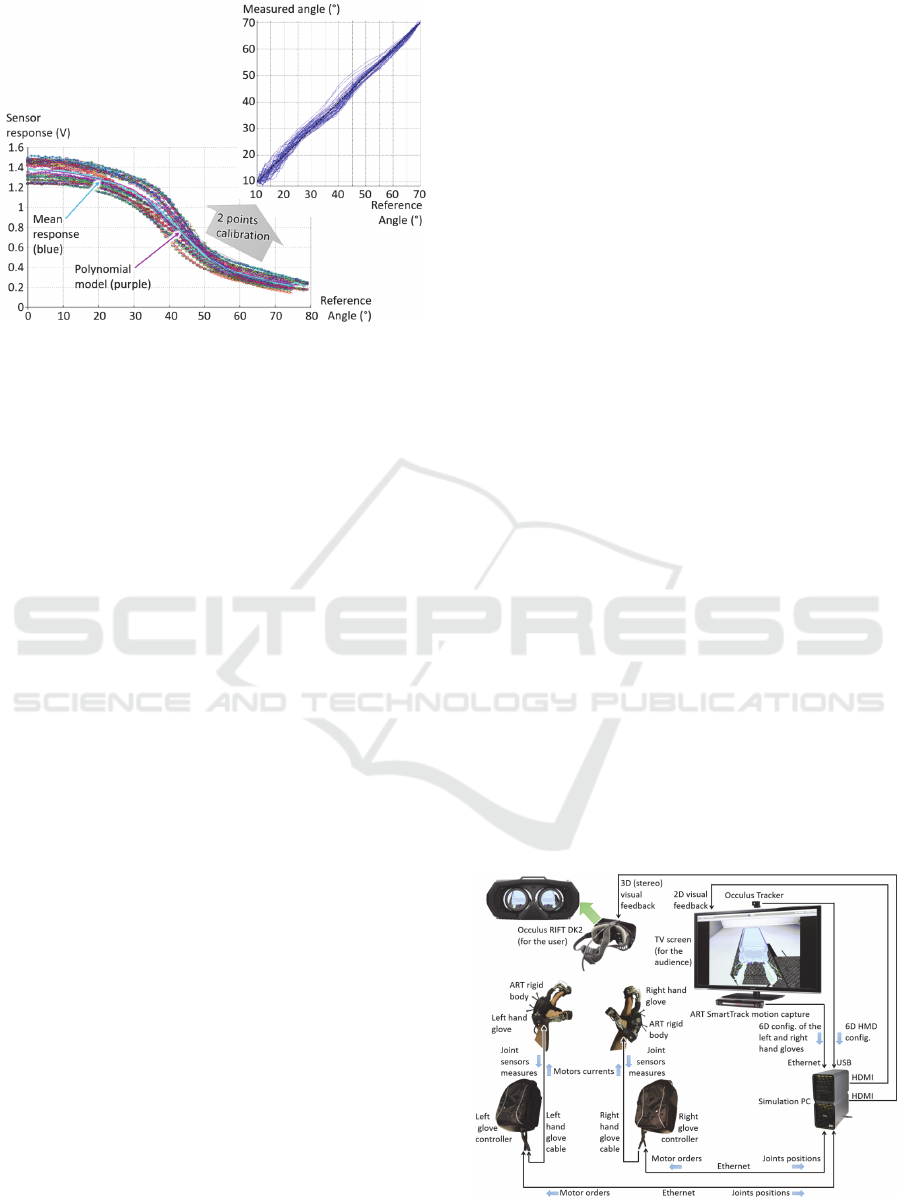
Figure 10: Optical sensors’ response.
Thirteen such sensors are integrated in our glove,
one on each of the abduction-adduction axes (q
1
), one
on each of the proximal and intermediate flexion axes
(q
2
and q
3
), plus one additional sensor for measuring
the internal rotation of the thumb (q
xb0
). Knowing that
the angle q
4
can be computed from q
3
using the
formula introduced in (Ngalé Haulin et al., 2001) and
that the position of the fingertip does not depend on
q
5
, q
6
and q
7
, it can be demonstrated that these sensors
are sufficient to compute the position of the fingertips
relative to the palm. The sensors measuring angle q
2
is even not mandatory as this angle is already
measured by the motor’s encoder. This redundant
sensor is still useful to get an absolute measure and
avoid the need to initialize the measurement at start-
up on this axis.
2.7 Controller
To manage all sensors and actuators of the hybrid
haptic feedback glove, a custom designed controller
was developed. It is composed of three types of cards:
Two cards in charge of the management of the
ReMax21 actuators (each card being able to
manage 2 motors and their incremental encoders).
These motors are controlled using a current loop
running at 25kHz and a speed loop running at
5kHz, managed by a Texas Instrument
microcontroller (ref. TMS320F28035). The motor
current is measured with a 14 bits AD converter,
and the speed information comes from the 512ppt
encoders. Each card integrates two
microcontrollers, as well as a H bridge per motor
(ref. Texas Instruments DRV8432).
One card for the management of the four RE8
actuators. This card has also fourteen 12 bits
analog inputs in charge of the acquisition of the
13 analog values of the joint sensors. Two
microcontrollers (ref. TMS320F28035) are used
therefore, each microcontroller being in charge of
two actuators and seven analog inputs. Joints
sensors’ positions are acquired at a frequency of
5Khz, and the motors are controlled in speed
mode using a U-RI control law running at a
frequency of 25kHz (the RE8 actuators have no
rotary sensors), with a 12-bits resolution for the
current acquisition. A double H-bridge (ref. Texas
Instrument DRV8848) allows the microcontroller
to manage the power supply for each motor.
Finally, a motherboard ensures the link between
the UDP communication and the actuators’ cards.
This link is managed by a microcontroller (ref.
Microchip PIC32MX695F512L) running at a
frequency of 1Khz. This bi-directional
communication allows sending position and
current data to the simulation and receiving speed
and force orders.
This controller is sufficiently compact to be
integrated in a small backpack. It is powered by a 12V
power supply, making it compatible with a battery.
3 VR APPLICATION
Figure 11 illustrates the architecture of the VR system
used to test the hybrid haptic feedback glove. The PC
running the VR simulation is coupled to the gloves’
controllers using Ethernet cables. The user wears the
left and right gloves and his hands’ movements are
measured by an ART motion capture system. An
Oculus Rift DK2 Head Mounted Display (whose
movements are measured by an Oculus tracker so as
to adjust the viewing angle) is used for visual
feedback. An additional TV screen is used to display
the virtual environment to the audience.
Figure 11: Architecture of the VR environment.
Design and Integration of a Dexterous Interface with Hybrid Haptic Feedback
461

The dextrous hybrid haptic feedback interface is
coupled to a VR application developed in Unity and
running the XDE physics engine (Merlhiot et al.,
2012). Given the nature of the tasks simulated, a
particular attention was given to the simulation of the
friction between the fingers and their environment,
with an advanced Coulomb-Contensu model. As
shown in Figure 12, an avatar of the haptic glove
coupled at the joint level to the real glove is used to
control the virtual hand that interacts with the
environment. When the virtual hand is blocked, it
constraints the movements of the glove’s avatar thus
of the real glove.
Figure 12: Coupling between the glove and its avatar at
joint level.
Figure 13 illustrates an example simulation. The
user can easily grasp and manipulate virtual objects.
Figure 13: Bimanual use of the gloves in VR.
The first tests performed with the virtual model of
the battery demonstrated that simple operations are
feasible (e.g. grasping and displacement of the on-
board computing unit). Additional work is however
still needed to allow for the simulation of finer tasks
(e.g. unscrewing the bolts used to fix the computing
unit, manipulation of internal cables and connectors).
4 CONCLUSION AND
PERSPECTIVES
This paper presents a novel hybrid haptic glove, with
details on its electro-mechanical design and its
integration in a VR application. Contrary to most
existing force feedback gloves, haptic feedback is
generated in several directions, yet this multi-
directional haptic feedback is attained in a more
compact package than with devices equipped with
large force feedback motors on several axes.
This design constitutes an interesting alternative to
existing VR gloves which, despite large efforts, still
suffer critical flaws that prevent their wide
dissemination (weight, volume, complexity and cost
of multi-fingers fully actuated exoskeletons and
fingertip devices, limited number of force feedback
degrees of freedom of under-actuated gloves, lack of
rendering realism of fingertip wearables and
thimbles). On the contrary, our design offers rich
interaction capabilities and haptic feedback in a
relatively compact and light system that could be
produced at a reasonable cost in the future.
First tests show that this solution allows efficient
dexterous interactions in VR. This observation tends
to confirm the interest of hybrid haptic feedback,
offering interesting perspectives for both VR
applications and dexterous teleoperation. Potential
VR applications cover training industrial tasks as
exemplified in previous section, but also virtual
surgery training, and, of course, immersive video
games. Regarding teleoperation, it could be used for
example for the control of a telepresence robot used
for precise tele-manipulation of radioactive or
dangerous material, for the control of dextrous
human-like space or subsea robots like Robonaut 2
(Diftler et al., 2011) or Aquanaut (Manley et al.,
2018), for remote bomb disposal or distant
maintenance of an industrial setting.
Short term future work should be focused on a
thorough evaluation of the device in order to confirm
these first results. In the longer term, further work is
planned on the VR application in order to allow the
simulation of more complex scenarios.
ACKNOWLEDGEMENTS
This research was partly supported by the “Agence
Nationale de la Recherche” (Mandarin project -
ANR-12-CORD-0011, labeled by “Cap Digital Paris
Région”, the French cluster for digital contents and
services).
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
462

REFERENCES
Arnaldi, B., Cotin, S., Couture, N., Dautin, J.L., Gouraton,
V., Gruson, F., Lourdeaux, D., (2018), Nouvelles
applications, in Réalité virtuelle et réalité augmentée,
mythes et réalités, ISTE, 2018, pp. 27-93.
Conti, F., Khatib, O., (2005), Spanning large workspaces
using small haptic devices, Proc. IEEE Worldhaptics
Conf., 6 pages.
Diftler, M.A., Mehling, J.S., Abdallah, M.E., Radford,
N.A., Bridgwater, L.B., Sanders, A.M., Askew, R.S.,
Linn, D.M., Yamokoski, J.D., Permenter, F.A.,
Hargrave, B.K., Platt, R., Savely, R.T., Ambrose, R.O.,
(2011), Robonaut 2 - The First Humanoid Robot in
Space, Proc. IEEE Int. Conf. on Robotics and
Automation, pp. 2178-2183.
Feix, T., Pawlik, R., Schmiedmayer, H.B., Romero, J.,
Kragic, D., (2009), A Comprehensive Grasp
Taxonomy, Robotics, Science and Systems Conference:
Workshop on Understanding the Human Hand for
Advancing Robotic Manipulation.
Girard, A., Marchal, M., Gosselin, F., Chabrier, A.,
Louveau, F., Lecuyer, A., (2016), HapTip: Displaying
Haptic Shear Forces at the Fingertips for Multi-Finger
Interaction in Virtual Environments, Frontiers in ICT,
3(6), 15 pages.
Gleeson, B., Horschel, S., Provancher, W., (2010), Design
of a Fingertip-Mounted Tactile Display with Tangential
Skin Displacement Feedback, IEEE Trans. on Haptics,
3(4), pp. 297-301.
Gonzalez, F., Gosselin, F., Bachta, W., (2014), Analysis of
hand contact areas and interaction capabilities during
manipulation and exploration, IEEE Trans. on Haptics,
7(4), pp. 415-429.
Gosselin, F., Jouan, T., Brisset, J., Andriot, C., (2005),
Design of a wearable haptic interface for precise finger
interactions in large virtual environments, Proc. IEEE
Worldhaptics Conf., pp. 202–207.
Hansen, C., Gosselin, F., Ben Mansour, K., Devos, P.,
Marin, F., (2018), Design-validation of a hand
exoskeleton using musculoskeletal modeling, Applied
Ergonomics, 68, pp. 283-288.
Hinchet, R., Vechev, V., Shea1, H., Hilliges, O., (2018),
DextrES: Wearable Haptic Feedback for Grasping in
VR via a Thin Form-Factor Electrostatic Brake, Proc.
ACM User Interface and Technology Symp., pp. 901-
912.
Heo, P., Min Gu, G., Lee, S.J., Rhee, K., Kim, J., (2012),
Current Hand Exoskeleton Technologies for
Rehabilitation and Assistive Engineering, Int. J.
Precision Engineering and Manufacturing, 13(5), pp.
807-824.
Manley, J.E., Halpin, S., Radford, N., Ondler, M., (2018),
Aquanaut: A New Tool for Subsea Inspection and
Intervention, Proc. IEEE/MTS Oceans Conf. and
Exposition, 4 pages.
Massie, T., Salisbury, J.K., (1994), The PHANTOM haptic
interface: A device for probing virtual objects, Proc.
ASME Symp. on Haptic Interfaces for Virtual
Environment and Teleoperator Systems, pp. 295–299.
Merlhiot, X., Le Garrec, J., Saupin, G., Andriot, C., (2012),
The XDE mechanical kernel: Efficient and robust
simulation of multibody dynamics with intermittent
nonsmooth contacts, Proc. Joint Int. Conf. on
Multibody System Dynamics.
Ngalé Haulin, E., Lakis, A.A., Vinet, R., (2001), Optimal
synthesis of a planar four-link mechanism used in a
hand prosthesis, Mechanism and Machine Theory,
36(11-12), pp. 1203-1214
Nilsson, M., Ingvast, J. , Wikander, J., von Holst, H.,
(2012), The Soft Extra Muscle System for Improving
the Grasping Capability in Neurological Rehabilitation,
Proc. IEEE EMBS Int. Conf. on Biomedical Engineerig
and Sciences, pp. 412-417.
Perret, J., Kneschke, C., Vance, J., Dumont, G., (2013),
Interactive Assembly Simulation with Haptic
Feedback, Assembly Automation, 33 (3), pp. 214-220.
Perret, J., Vander Poorten, E., (2018), Touching Virtual
Reality: A Review of Haptic Gloves, Proc. Int. Conf.
on New Actuators, pp. 270-274.
Pacchierotti, C., Sinclair, S., Solazzi, M., Frisoli, A.,
Hayward, V., Prattichizzo, D., (2017), Wearable Haptic
Systems for the Fingertip and the Hand: Taxonomy,
Review, and Perspectives, IEEE Trans. on Haptics, pp.
580-600.
Palli, G., Pirozzi, S., (2011), Miniaturized Optical-based
Force Sensors for Tendon-driven Robots, Proc. IEEE
Int. Conf. on Robotics and Automation, pp. 5344-5349.
Design and Integration of a Dexterous Interface with Hybrid Haptic Feedback
463
