
Solution of the Forward Kinematic Problem of 3UPS-PU Parallel
Manipulators based on Constraint Curves
Adri
´
an Peidr
´
o
a
, Luis Pay
´
a
b
, Sergio Cebollada
c
, Vicente Rom
´
an
d
and
´
Oscar Reinoso
e
Automation, Robotics and Computer Vision Laboratory,
Miguel Hern
´
andez University, Avda. de la Universidad s/n, 03202 Elche, Spain
Keywords:
Forward Kinematics, k-d Trees, Parallel Robots, Algebraic Elimination, Curve Rendering, Angular Wrapping.
Abstract:
Algebraic elimination methods for solving the forward kinematic problem of parallel manipulators are fast and
obtain all solutions, but they require eliminating all unknowns except one, and solving a high-degree univariate
polynomial whose coefficients often have expressions too complex to be obtained symbolically. This prevents
parameterizing these coefficients in terms of all the kinematic parameters involved, which requires repeating
the elimination process again whenever these kinematic parameters change. To avoid this, this paper presents
an new method to solve the forward kinematics of 3UPS-PU parallel manipulators by eliminating only one
unknown, reducing the system to an easily parameterizable set of planar constraint curves in the space of the
remaining unknowns, which contain all real solutions of the forward kinematics. By sampling points from
these curves densely, and sorting the sampled points using k-d trees, the proposed method manages to search
all real solutions along these curves. The proposed method is compared to previous methods that obtain all
solutions and is shown to perform about 100 times faster than these methods, but is less general than them.
1 INTRODUCTION
This paper presents a method for quickly obtaining
all real solutions of the forward kinematic problem
of 3UPS-PU parallel manipulators. This manipulator,
which has been studied by several authors, is part of
the well-known Tricept machining robot (Neumann,
1988) which has been widespread in industry.
Siciliano (1999) analyzed the inverse kinematics
and manipulability of the Tricept robot. Fattah and
Kasaei (2000) modelled the dynamics of 3UPS-PU
parallel robots using Newton-Euler equations and the
natural orthogonal complement method. Caccavale
et al. (2003) also modeled the dynamics of the Tri-
cept robot, and designed an impedance controller for
interacting with the environment.
Koll
´
ath et al. (2009) studied the workspace and
positioning accuracy of this robot. Hosseini and Da-
niali (2011) studied the proximity to singularities of
the Tricept manipulator, and optimized its design to
maximize workspace volume. Hu (2014) analyzed
a
https://orcid.org/0000-0002-4565-496X
b
https://orcid.org/0000-0002-3045-4316
c
https://orcid.org/0000-0003-4047-3841
d
https://orcid.org/0000-0002-3706-8725
e
https://orcid.org/0000-0002-1065-8944
the workspace and forward/inverse kinematics at po-
sition, velocity, and acceleration levels, for a 6-DOF
serial-parallel robot composed of two 3UPS-PU par-
allel robots connected in series.
Regarding singularities of this robot, Liu and Hsu
(2007) and Peidr
´
o et al. (2019) analyzed its singular-
ity locus in the output and input space, respectively,
characterizing some important singularities. Lu et al.
(2007) and Pendar et al. (2008) also analyzed some
notable singularities of this robot.
Concerning the forward kinematic problem, Joshi
and Tsai (2003) solved this problem for 3UPS-PU
robots with flat platforms through algebraic elimina-
tion, obtaining the symbolic expression of a univari-
ate polynomial whose roots are the solutions of the
forward kinematics. Using also algebraic elimination,
Innocenti and Wenger (2006) solved the forward kine-
matics of the general family of 3UPS-PRR manipula-
tors (which includes 3UPS-PU as a special case), re-
ducing the problem to a 28-th degree polynomial.
Algebraic elimination methods are widely used
for solving the forward kinematics of parallel manip-
ulators, due to their advantages: they boil down to
finding the roots of a polynomial, which is a mature
problem for which efficient root-finding techniques
exist. They obtain all solutions, including nonreal
324
Peidró, A., Payá, L., Cebollada, S., Román, V. and Reinoso, Ó.
Solution of the Forward Kinematic Problem of 3UPS-PU Parallel Manipulators based on Constraint Curves.
DOI: 10.5220/0009828203240334
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 324-334
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ones. Lastly, they are very fast: once one obtains and
codes the symbolic expression of the coefficients of
the polynomial in terms of all parameters (joint dis-
placements, links’ lengths, etc.), one only needs to
substitute the numerical values of these parameters
into the expressions and get the roots of the polyno-
mial (e.g., using command roots in Matlab).
However, elimination methods also have disad-
vantages: the process of eliminating unknowns until
arriving at a univariate polynomial may introduce sev-
eral spurious solutions, and the degree of such poly-
nomial may increase quickly, especially if the elim-
ination steps are not performed carefully. Further-
more, the symbolic expression of the coefficients of
the final polynomial can be tremendous, with expres-
sions so large and complex that span several pages
(Joshi and Tsai, 2003) in the most optimistic cases. In
other cases, they become too complicated to be ob-
tained symbolically even with the aid of computer al-
gebra, having to settle for numerical coefficients in-
stead, obtained by giving concrete or random values
to all parameters (Innocenti and Wenger, 2006).
When implementing programming code for the
resolution of the kinematic problems of parallel ma-
nipulators, with the aim of simulating these problems
for research or educational purposes (Peidr
´
o et al.,
2016), it is desirable to implement resolution meth-
ods that provide all solutions (to provide information
as complete as possible) and, at the same time, ob-
tain these solutions as quick as possible, so that the
user can change some kinematic parameter and in-
stantaneously get the new updated solutions. These
requirements are best satisfied by elimination meth-
ods, which require typing the symbolic expression of
the coefficients of the polynomial in the programming
code, parameterized in terms of all involved variables.
However, for robots as complex as the general 3UPS-
PU manipulator, this is not feasible, due to these co-
efficients having too large expressions to obtain them,
even with the help of computer algebra software.
In order to solve this problem, this paper presents
a new method for obtaining all real solutions of the
forward kinematics of 3UPS-PU parallel manipula-
tors, with the advantages of elimination methods (i.e.,
obtaining all solutions quickly) but avoiding the too-
complex-to-obtain symbolic expressions of the coef-
ficients of the polynomial. The proposed method be-
gins by eliminating some unknown of the system of
equations (as ordinary elimination methods do), but
instead of continue eliminating other unknowns un-
til arriving at a final univariate polynomial of high
degree (which has the undesired large coefficients),
our method focuses on solving graphically a reduced
and simpler system of equations obtained from elim-
Figure 1: 3UPS-PU parallel manipulator.
inating the first unknown. Such reduced system is
interpreted geometrically as a constraint curve that
contains all the sought solutions. Thus, the method
proposed in this paper plots that curve and efficiently
searches the desired solutions along it.
The remainder of this paper is organized as fol-
lows. Section 2 presents the kinematic model of
3UPS-PU manipulators. In Section 3, this kinematic
model is transformed into a set of constraint curves
that contain all real solutions of the forward kine-
matics of this manipulator. A method to search so-
lutions along these curves is described in Section 4.
The value of the proposed method is demonstrated
through an example in Section 5. Finally, Section 6
summarizes conclusions and points out future work.
2 THE 3UPS-PU MANIPULATOR
This section presents the kinematic model of the
3UPS-PU parallel manipulator, which is depicted in
Figure 1. This manipulator is composed of a mobile
platform connected to a fixed base through four se-
rial kinematic chains connected in parallel. Three of
such kinematic chains (denoted by A
i
B
i
in Figure 1)
have architecture Universal-Prismatic-Spherical, with
their prismatic joints being actuated, allowing one to
control the length ρ
i
of each leg (this chain is denoted
by UPS, where underline means “actuated”). The re-
maining kinematic chain OC, with architecture PU,
is passive, and grants three degrees of freedom to the
relative motion of the mobile platform with respect to
the fixed base: a translation z along a passive slider,
and two rotations (α, β) about the axes of a passive
Universal joint (see Figure 1). Two frames OXYZ
and CUVW are attached to the fixed base and mo-
Solution of the Forward Kinematic Problem of 3UPS-PU Parallel Manipulators based on Constraint Curves
325

bile platform, respectively. By controlling the lengths
(ρ
1
,ρ
2
,ρ
3
) of the actuated chains, the position z and
orientation (α,β) of the platform can be controlled.
The kinematic and geometric parameters of the
manipulator are defined as follows. θ is the constant
angle between OC and the Z axis, with OC contained
in plane XZ. z is the signed position of C along the
passive slider OC. α and β are the angles by which the
mobile platform is rotated about the axes of the uni-
versal joint centered at C. A
i
is the universal joint of
the i-th actuated kinematic chain, and a
i
= [a
ix
,a
iy
,0]
T
are its coordinates in frame OXYZ. B
i
is the spherical
joint of the i-th actuated chain, and b
i
= [b
iu
,b
iv
,b
iw
]
T
are its local coordinates in frame CUVW. The length
of each actuated chain is A
i
B
i
= ρ
i
.
Note that we make no simplification for the geom-
etry of the 3UPS-PU manipulator considered in Fig-
ure 1, which is fairly general, unlike other previous
papers, which mainly focus on simplified designs for
which both the mobile platform and fixed base are flat
(Peidr
´
o et al., 2019). In case that some of the universal
joints A
1
A
2
A
3
were not contained in plane OXY as
in Figure 1, one can always define plane XY passing
through the centers of the universal joints A
1
A
2
A
3
,
then fix the origin of frame OXYZ in the point where
line OC intersects this plane, and define the X and Z
axes as the unit projections of line OC on plane XY
and on its perpendicular, respectively.
In Figure 1, all variables except for (z, α, β) and
(ρ
1
,ρ
2
,ρ
3
) are constant design parameters, i.e., they
are fixed once a concrete design is chosen for this
manipulator. (ρ
1
,ρ
2
,ρ
3
) are the controlled inputs,
whereas (z,α,β) are the outputs, which can be con-
trolled indirectly through the inputs. The relationship
between inputs and outputs is derived by enforcing
the condition that the distance between joints A
i
and
B
i
must equal ρ
i
(i = 1, 2, 3), which yields:
e
1
=
z · u
θ
+ R
y
θ
R
x
α
R
y
β
b
1
− a
1
2
− ρ
2
1
= 0 (1)
e
2
=
z · u
θ
+ R
y
θ
R
x
α
R
y
β
b
2
− a
2
2
− ρ
2
2
= 0 (2)
e
3
=
z · u
θ
+ R
y
θ
R
x
α
R
y
β
b
3
− a
3
2
− ρ
2
3
= 0 (3)
where u
θ
= [s
θ
,0,c
θ
]
T
(s
j
and c
j
denote the sine and
cosine of subscript angle j, respectively), and R
q
p
de-
notes a rotation matrix of angle p around axis q.
The problem analyzed in this paper is the forward
kinematics, which consists in solving (z,α,β) from
Eqs. (1)-(3) for given known values of (ρ
1
,ρ
2
,ρ
3
). A
new solution to this problem will be presented in the
next sections.
3 CONSTRAINT CURVES
For given ρ
i
, Eqs. (1)-(3) constitute a nonlinear sys-
tem of three equations in three unknowns (z,α,β). A
typical method for solving these systems consists in
performing algebraic manipulations in order to elimi-
nate equations and variables, until reducing the origi-
nal system to a univariate polynomial in one of the un-
knowns (e.g., z), which can be solved via well-known
root-finding algorithms. However, as explained in
the introduction, this method has some shortcomings:
the final univariate polynomial obtained can have too
high a degree if the elimination steps are not done
carefully, spurious solutions may appear (i.e., solu-
tions that do not satisfy the original system), and the
general symbolic expression of the coefficients of this
polynomial is usually too complex or impossible to
obtain even with computer algebra software due to
involving many terms, which prevents parameteriz-
ing the solution in terms of general parameters. The
method proposed in this paper begins by eliminating
one unknown from the system (z), reducing it to a set
of curves that constrain the admissible combinations
of the other two unknowns (α and β). Then, these
curves can be searched for real solutions of the origi-
nal system, without needing to further reduce the sys-
tem to a univariate polynomial, which would lead to a
high-degree polynomial with excessively complicated
coefficients and likely spurious solutions.
First, note that the squared norm in Eqs. (1)-(3)
can be expanded as follows:
e
i
= z
2
+ a
2
i
+ b
2
i
+ 2zu
T
θ
(Rb
i
− a
i
) − 2a
T
i
Rb
i
− ρ
2
i
(4)
where a
2
i
=
k
a
i
k
2
, b
2
i
=
k
b
i
k
2
, and R = R
y
θ
R
x
α
R
y
β
.
Considering Eq. (4), it can be checked that subtracting
Eq. (3) from Eq. (1) and dividing by 2 yields:
k
13
+ zu
T
θ
(Rb
13
− a
13
) − tr(c
13
R) = 0 (5)
where the following parameters are constants:
k
i j
= 0.5
(a
2
i
− a
2
j
) + (b
2
i
− b
2
j
) − (ρ
2
i
− ρ
2
j
)
(6)
a
i j
= a
i
− a
j
(7)
b
i j
= b
i
− b
j
(8)
c
i j
= b
i
a
T
i
− b
j
a
T
j
(9)
and where tr(·) is the trace of a matrix. In order to
obtain Eq. (5) from (4), it is necessary to make use
of the linearity of the trace operator, and consider that
a
T
Rb = tr(ba
T
R). Similarly, subtracting Eq. (3) from
Eq. (2) and dividing by 2 yields:
k
23
+ zu
T
θ
(Rb
23
− a
23
) − tr(c
23
R) = 0 (10)
Note that subtracting e
3
from e
1
and e
2
cancels the
quadratic term z
2
which was present in Eq. (4), and
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
326

the two new equations (5) and (10), which replace the
original quadratic Eqs. (1)-(2), are linear in z. Accord-
ingly, for a given pair (α,β) to yield the same value
of z from these two linear equations (i.e., to enforce
these two equations to be consistent), the determinant
of the following 2 × 2 matrix M must vanish:
M =
u
T
θ
(Rb
13
− a
13
) tr(c
13
R) − k
13
u
T
θ
(Rb
23
− a
23
) tr(c
23
R) − k
23
(11)
det(M) = 0 (12)
Recall that R = R
y
θ
R
x
α
R
y
β
is a function of (α, β), so
the only unknowns in Eq. (12) are (α,β) (z has been
eliminated from the system). Thus, Eq. (12) defines
a set of constraint curves (possibly multiple disjoint
curves) in plane (α,β), which contain the solutions
of the forward kinematic problem. In particular, the
points of these curves where e
3
= 0 will be the sought
solutions, since the other two equations of the sys-
tem are automatically satisfied for some real z due to
(α,β) belonging to the curves defined by Eq. (12).
The algorithm which will be described in the next
Section 4 will perform an efficient search along these
curves, looking for zero-crossings of e
3
. However,
before presenting the proposed algorithm, we will an-
alyze in more detail the degree of such curves in plane
(α,β). To that end, these curves will be intersected
with straight lines for which α or β remain constant.
3.1 Intersection with Constant α
The objective of this subsection is to intersect the
curves defined by Eq. (12) in plane (α,β) with a
straight line defined by α = constant. If α is constant
and known, then M is a function of the only unknown
β, so M can be written as follows:
M = C
α
c
β
+ S
α
s
β
+ Y
α
(13)
where the following newly defined matrices:
C
α
=
u
T
θ
R
y
θ
R
x
α
B
c
b
13
tr(c
13
R
y
θ
R
x
α
B
c
)
u
T
θ
R
y
θ
R
x
α
B
c
b
23
tr(c
23
R
y
θ
R
x
α
B
c
)
(14)
S
α
=
u
T
θ
R
y
θ
R
x
α
B
s
b
13
tr(c
13
R
y
θ
R
x
α
B
s
)
u
T
θ
R
y
θ
R
x
α
B
s
b
23
tr(c
23
R
y
θ
R
x
α
B
s
)
(15)
Y
α
=
u
T
θ
(R
y
θ
R
x
α
B
Y
b
13
− a
13
) tr(c
13
R
y
θ
R
x
α
B
Y
) − k
13
u
T
θ
(R
y
θ
R
x
α
B
Y
b
23
− a
23
) tr(c
23
R
y
θ
R
x
α
B
Y
) − k
23
(16)
are constant for constant α. In Eqs. (14)-(16), the fol-
lowing sparse matrices have been introduced:
B
c
= diag(1, 0, 1),
B
Y
= diag(0, 1, 0),
B
s
=
0 0 1
0 0 0
−1 0 0
(17)
where diag(m
1
,m
2
,...,m
n
) denotes an n × n diagonal
matrix with numbers m
1
, m
2
, ... m
n
in its diagonal.
The rewriting of Eq. (11) as Eqs. (13)-(16) has been
achieved by decomposing the rotation R
y
β
as follows:
R
y
β
=
c
β
0 s
β
0 1 0
−s
β
0 c
β
= B
c
c
β
+ B
s
s
β
+ B
Y
(18)
Now, performing the tangent of half-angle substitu-
tion in Eq. (13), i.e.:
c
β
=
1 −t
2
β
1 +t
2
β
, s
β
=
2t
β
1 +t
2
β
, with t
β
= tan
β
2
(19)
Using (19), M in Eq. (13) will be written as follows:
M =
C
α
(1 −t
2
β
) + S
α
2t
β
+ Y
α
(1 +t
2
β
)
1 +t
2
β
(20)
Inserting (20) into (12) yields:
det
h
C
α
(1 −t
2
β
) + S
α
2t
β
+ Y
α
(1 +t
2
β
)
i
(1 +t
2
β
)
2
= 0 (21)
Clearing the denominator in (21) and expanding the
determinant in the numerator yields the following
quartic equation in t
β
:
ω
4
t
4
β
+ ω
3
t
3
β
+ ω
2
t
2
β
+ ω
1
t
β
+ ω
0
= 0 , (22)
where the coefficients ω
i
are computed as follows:
ω
4
= C
11
α
· (C
22
α
−Y
22
α
) +C
12
α
· (Y
21
α
−C
21
α
)
+C
21
α
·Y
12
α
−C
22
α
·Y
11
α
+Y
11
α
·Y
22
α
(23)
−Y
12
α
·Y
21
α
ω
3
= − 2 · (C
11
α
· S
22
α
−C
12
α
· S
21
α
−C
21
α
· S
12
α
+C
22
α
· S
11
α
− S
11
α
·Y
22
α
+ S
12
α
·Y
21
α
(24)
+ S
21
α
·Y
12
α
− S
22
α
·Y
11
α
)
ω
2
= − 2 · (C
11
α
·C
22
α
−C
12
α
·C
21
α
− 2 · S
11
α
· S
22
α
(25)
+ 2 · S
12
α
· S
21
α
−Y
11
α
·Y
22
α
+Y
12
α
·Y
21
α
)
ω
1
= 2 · (C
11
α
· S
22
α
−C
12
α
· S
21
α
−C
21
α
· S
12
α
+C
22
α
· S
11
α
+ S
11
α
·Y
22
α
− S
12
α
·Y
21
α
(26)
− S
21
α
·Y
12
α
+ S
22
α
·Y
11
α
)
ω
0
= C
11
α
· (C
22
α
+Y
22
α
) −C
12
α
· (C
21
α
+Y
21
α
)
−C
21
α
·Y
12
α
+C
22
α
·Y
11
α
+Y
11
α
·Y
22
α
(27)
−Y
12
α
·Y
21
α
The coefficients C
ij
α
, S
ij
α
, and Y
ij
α
denote the entries
in the i-th row and j-th column of matrices C
α
, S
α
,
and Y
α
, respectively. All these coefficients are known
constants for a given value of α.
Solution of the Forward Kinematic Problem of 3UPS-PU Parallel Manipulators based on Constraint Curves
327

The roots of (22) provide the intersection points
between the constraint curves defined by Eq. (12)
and a straight line defined by α = constant. Since
Eq. (22) is a quartic polynomial, it will have a max-
imum of four real roots, i.e., there will be up to four
such intersection points. For each real root t
∗
β
of this
polynomial, the corresponding value of β is obtained
as β
∗
= 2 arctan(t
∗
β
). Finally, it is worth noting that
Eq. (22) can be solved analytically, since its degree is
lower than five (it admits closed-form solution).
3.2 Intersection with Constant β
This case is analogous to the problem studied in §3.1.
In this case, we wish to compute the intersections
of the constraint curves defined by Eq. (12) in plane
(α,β) with a line defined by β = constant. Following
similar steps as in §3.1, we begin by decomposing the
rotation matrix R
x
α
as follows:
R
x
α
=
1 0 0
0 c
α
−s
α
0 s
α
c
α
= A
c
c
α
+ A
s
s
α
+ A
Y
(28)
where A
c
, A
s
and A
Y
are the following matrices:
A
c
= diag(0, 1, 1),
A
Y
= diag(1, 0, 0),
A
s
=
0 0 0
0 0 −1
0 1 0
(29)
Inserting (28) into (11), then M is rewritten as:
M = C
β
c
α
+ S
β
s
α
+ Y
β
(30)
where the matrices C
β
, S
β
and Y
β
are constant for a
given β, and they have the following expressions:
C
β
=
"
u
T
θ
R
y
θ
A
c
R
y
β
b
13
tr(c
13
R
y
θ
A
c
R
y
β
)
u
T
θ
R
y
θ
A
c
R
y
β
b
23
tr(c
23
R
y
θ
A
c
R
y
β
)
#
(31)
S
β
=
"
u
T
θ
R
y
θ
A
s
R
y
β
b
13
tr(c
13
R
y
θ
A
s
R
y
β
)
u
T
θ
R
y
θ
A
s
R
y
β
b
23
tr(c
23
R
y
θ
A
s
R
y
β
)
#
(32)
Y
β
=
u
T
θ
(R
y
θ
A
Y
R
y
β
b
13
− a
13
) tr(c
13
R
y
θ
A
Y
R
y
β
) − k
13
u
T
θ
(R
y
θ
A
Y
R
y
β
b
23
− a
23
) tr(c
23
R
y
θ
A
Y
R
y
β
) − k
23
(33)
Next, the same steps performed between Eqs. (19)-
(22) should be repeated here: the tangent of half-
angle substitution [α = 2arctan(t
α
)] is performed in
Eq. (30) and the determinant of M is expanded, arriv-
ing at the following quartic equation:
ω
4
t
4
α
+ ω
3
t
3
α
+ ω
2
t
2
α
+ ω
1
t
α
+ ω
0
= 0 , (34)
where the coefficients ω
i
depend on the (constant) en-
tries C
ij
β
, S
ij
β
, and Y
ij
β
of matrices C
β
, S
β
, and Y
β
, and
these coefficients can be computed using Eqs. (23)-
(27), by substituting every α for β in these equations.
We conclude from the analysis of Sections 3.1 and
3.2 that, when intersecting the constraint curves de-
fined by Eq. (12) in plane (α, β) with straight lines for
which α or β are constant, yields up to four intersec-
tion points, and these points can be obtained by solv-
ing analytically the quartic polynomials of Eqs. (22)
or (34). This will be exploited in the method pre-
sented in the next section for finding all real solutions
of the forward kinematics of 3UPS-PU manipulators.
4 PROPOSED METHOD
The constraint curve defined by Eq. (12) in plane
(α,β) contains the real solutions of the forward kine-
matics of the 3UPS-PU manipulator. The method pro-
posed in the present section consists in searching the
desired solutions along these curves. This method
consists of some steps, beginning by generating these
curves, as explained in the following subsection.
4.1 Step 1: Generating the Constraint
Curves
In order to search for solutions along the constraint
curves implicitly defined by Eq. (12), first it is nec-
essary to generate, “render” or “plot” these curves in
plane (α,β), which will be accomplished by the sam-
pling method described next, which was proposed in
(Peidr
´
o et al., 2018). This method consists in gener-
ating a sequence by varying α between −π rad and
+π rad using some step ∆α, so that for each value of
α in this sequence {−π,−π + ∆α, −π + 2∆α,...,π −
2∆α,π − ∆α,π}, β is solved from Eq. (22), obtaining
up to four real solutions. Geometrically, this process
consists in intersecting the constraint curves with a
bundle of parallel vertical lines uniformly separated a
distance ∆α (see Figure 2a), storing all the obtained
intersection points as a point cloud Cloud
α
.
This point cloud is a discrete approximation of the
constraint curves, which may be used for searching
the desired solutions of the forward kinematics, by
checking if e
3
changes sign between two neighbor-
ing intersection points (e.g., Q and R in Figure 2a).
However, in order for this strategy to work satisfacto-
rily, the density of intersection points along the curves
should be approximately uniform, which is not ac-
complished yet. Indeed, note that, in Figure 2a, the
regions where the constraint curves have vertical tan-
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
328
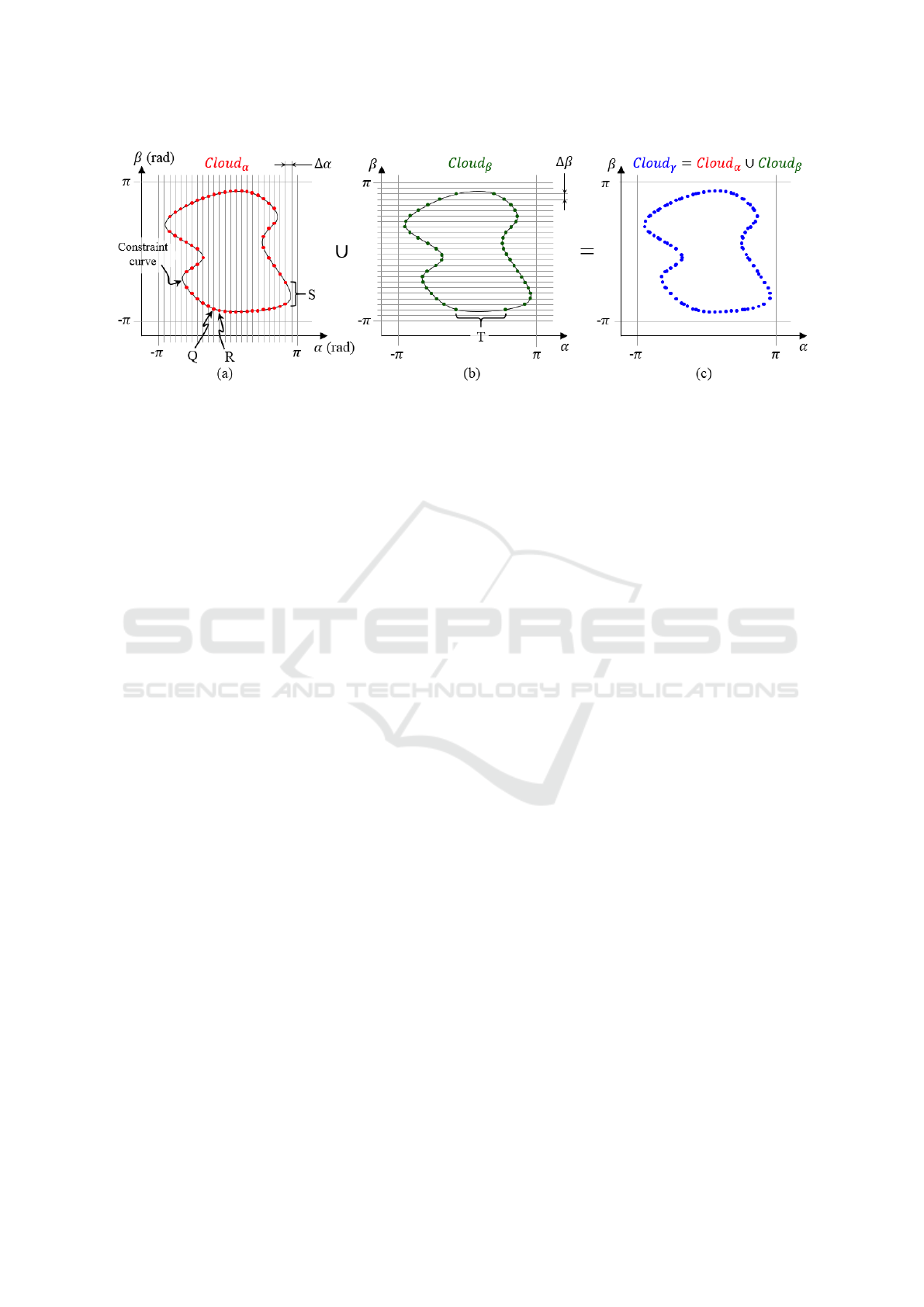
Figure 2: Discrete approximations of the constraint curves obtained by intersecting them with a bundle of vertical lines (a),
horizontal lines (b), and a combination of both (c).
gent have lower density of intersection points (e.g., re-
gion S in Figure 2a). As a result of this lower density,
neighboring points in these regions are too separated
and the algorithm may consider that they are not truly
neighbors, so it would not check if potential solutions
exist between them, which may miss solutions.
In order to avoid this, another sequence is defined,
this time by varying β between −π rad and π rad with
some step ∆β, and for each value of β in this sequence
{−π,−π+∆β,−π+2∆β,...,π− 2∆β, π−∆β,π}, α is
solved from Eq. (34), obtaining four real solutions at
most. Geometrically, this process consists in inter-
secting the constraint curves with a bundle of hori-
zontal parallel lines uniformly separated a distance of
∆β (see Figure 2b), storing all the intersection points
as another point cloud Cloud
β
. Comparing Figures
2a-b, one sees that the low-density regions in Figure
2a (e.g., region S) are now better defined in Figure 2b,
but at the expense of getting poorly sampled regions
where the constraint curves have horizontal tangent
(e.g., region T in Figure 2b).
As noted in (Simionescu, 2014; Peidr
´
o et al.,
2018), the union of both point clouds yields a more
accurate point cloud Cloud
γ
= Cloud
α
∪ Cloud
β
that
presents an approximately uniform density of points
along the curves, since the poorly defined regions of
Cloud
α
are compensated by Cloud
β
and vice versa
(see Figure 2c). This is the solution that will be
adopted here for obtaining a discrete approximation
of the constraint curves, which can be searched for
solutions of the forward kinematic problem.
After this, a set Cloud
γ
= {p
1
, p
2
, p
3
,...p
N
} of
points along the constraint curves is obtained. In gen-
eral, these points do not follow any useful order in
Cloud
γ
, since they are points of plane (α, β) that are
stored in memory in the same order as they are ob-
tained by intersecting the constraint curves with the
aforementioned sequences of vertical and horizontal
lines. Therefore, in order to search for solutions be-
tween these sampled points, it will be necessary to ar-
range these points in some data structure that allows
for efficient searches of the neighbors of each point.
This will be done in Step 2 of the proposed method.
Before proceeding to the next steps of the method,
let us define a unique companion point ˜p
i
= (z
i
,e
3i
)
associated to each p
i
= (α
i
,β
i
). ˜p
i
is calculated from
p
i
as follows: first, z
i
is obtained by substituting
(α
i
,β
i
) into Eq. (5) or (10) and solving for z. Any of
these linear equations is equally valid: since (α
i
,β
i
)
belongs to the constraint curve (they satisfy Eq. 12),
it is guaranteed that these two equations provide the
same solution for z. Then, α
i
, β
i
, and z
i
can be substi-
tuted into Eq. (3) to obtain a unique value of e
3i
.
4.2 Step 2: Sorting the Point Cloud
The second step of the proposed method consists
in organizing the point cloud Cloud
γ
using k-d (k-
dimensional) trees, which are data structures that sort
points in a k-dimensional space (in this paper, k=2).
A k-d tree T is obtained from a point cloud by re-
cursively dividing it at the point whose coordinate is
the median (and the coordinate used for doing this di-
vision is switched cyclically after each division). For
example: Figure 3a shows a set of seven points 1...7 in
plane (α, β). Point 5 is the median along coordinate α,
so it divides the set into two branches br
l
= {1, 4, 6}
and br
r
= {2, 3, 7}. This division is performed again
inside these two branches, but using now points 6
and 2, since these are the medians along coordinate
β in each branch. This generates four new branches:
br
lu
= {4}, br
ld
= {1}, br
ru
= {7} and br
rd
= {3}. If
we had more points, this process would continue re-
cursively, alternating cyclically the coordinate along
which the median divides each branch (α, β, α, β...).
The resulting k-d tree is shown in Figure 3b.
Solution of the Forward Kinematic Problem of 3UPS-PU Parallel Manipulators based on Constraint Curves
329
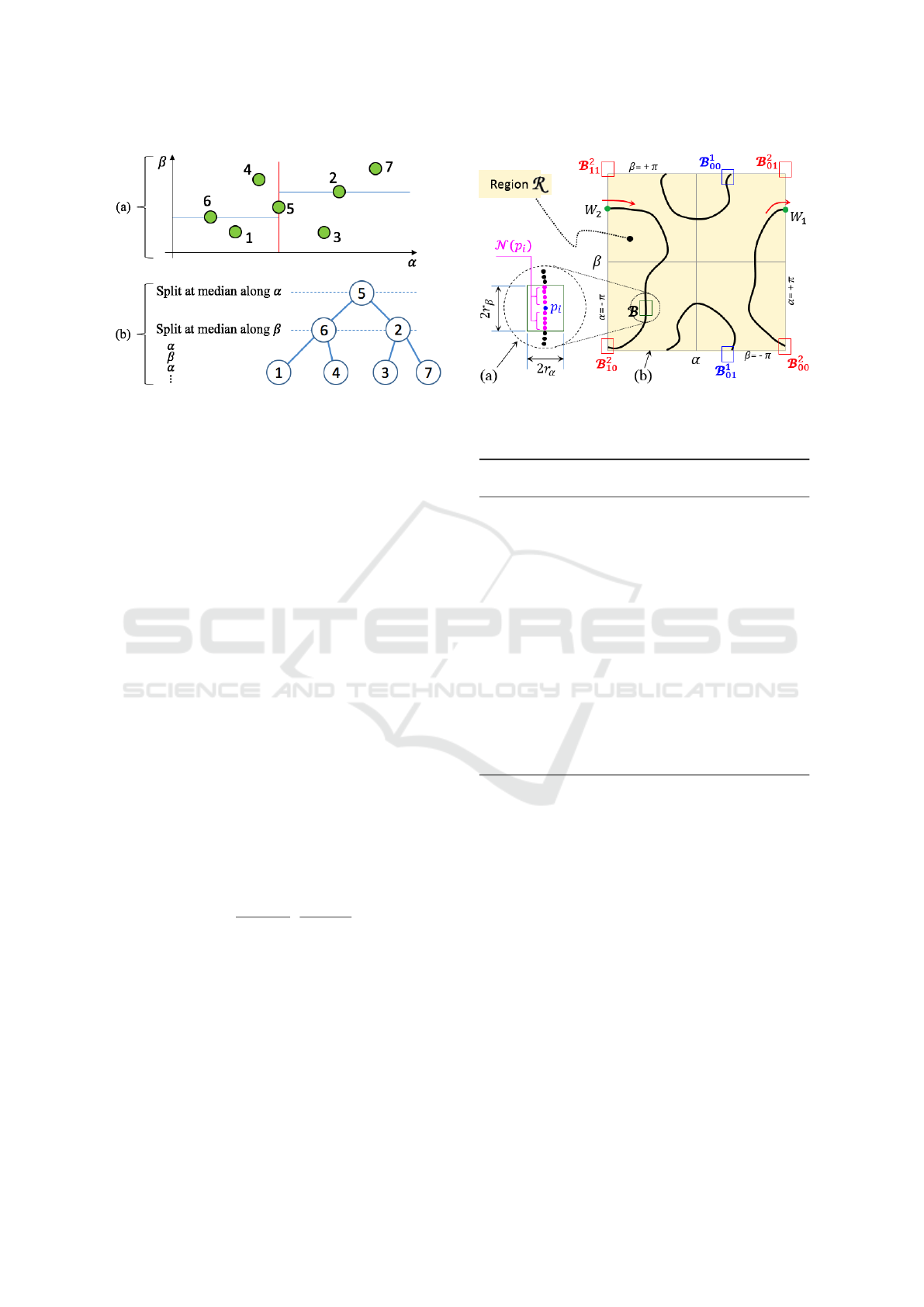
Figure 3: A set of points (a), and their k-d tree (b).
Building a k-d tree is useful for efficiently retriev-
ing data from a point cloud, e.g., obtaining all points
whose coordinates lie between specific limits (this is
what will be done in this paper). Since each layer di-
vides the previous one into two sets depending if their
coordinate is below or above the median, retrieving
all points whose coordinates lie within desired limits
is done faster than by checking all of them, since a
k-d tree search discards half of the data at each layer.
See (Press et al., 2007) for methods to build k-d trees.
4.3 Step 3: Searching Solutions
After building a k-d tree data structure T to sort the
point cloud Cloud
γ
, Algorithm 1 is executed to search
solutions along the curves. First, a set S is defined as
the empty set (line 1). After the algorithm finishes,
this set S will contain the sought solutions. Then,
for each point p
i
= (α
i
,β
i
) ∈ Cloud
γ
(line 2), a set
N (p
i
,r
α
,r
β
) of neighbors of p
i
is retrieved from the
k-d tree T (line 3). N (p
i
,r
α
,r
β
) is defined as follows:
N
p
i
,r
α
,r
β
= Cloud
γ
∩ B(p
i
,r
α
,r
β
) \
{
p
i
}
(35)
where:
B
p
i
= (α
i
,β
i
),r
α
,r
β
=
(α
j
,β
j
) : max
|α
j
− α
i
|
r
α
,
|β
j
− β
i
|
r
β
≤ 1
(36)
Note that N is composed of all points p
j
of Cloud
γ
(excluding p
i
) which fall inside a box B centered at
p
i
and with width 2r
α
and height 2r
β
, with r
α
and
r
β
being small radii (see Figure 4a). This retrieval
operation is very fast because p
j
have been arranged
into a k-d tree T previously (step 2), which allows one
to search very efficiently points whose coordinates lie
in specified intervals, like those imposed by box B.
When retrieving the neighbors p
j
of p
i
, one
should be careful with the fact that all these points
Figure 4: (a) Box B containing the neighbors of p
i
. (b) Con-
straint curves wrapped at α, β = ±π, with wrapped boxes
B
uv
. Boxes are exaggerated here, they usually are smaller.
Algorithm 1 : Searching solutions S along the constraint
curves defined by Eq. (12).
1: S =
/
0
2: for all p
i
= (α
i
,β
i
) ∈ Cloud
γ
do
3: Retrieve N (p
i
,r
α
,r
β
) from T
4: for all p
j
= (α
j
,β
j
) ∈ N (p
i
,r
α
,r
β
) do
5: if e
3i
· e
3 j
≤ 0 then
6: α
∗
= (e
3i
α
j
− e
3 j
α
i
)/(e
3i
− e
3 j
)
7: β
∗
= (e
3i
β
j
− e
3 j
β
i
)/(e
3i
− e
3 j
)
8: z
∗
= (e
3i
z
j
− e
3 j
z
i
)/(e
3i
− e
3 j
)
9: s
∗
= [α
∗
,β
∗
,z
∗
]
T
10: if s
∗
/∈ B
s,r
α
,r
β
∀s ∈ S then
11: do
12: ∆s
∗
= −J(s
∗
)
−1
F(s
∗
)
13: s
∗
← s
∗
+ ∆s
∗
14: while
k
∆s
∗
k
> ε
15: S ← S ∪
{
s
∗
}
lie on the constraint curves in plane (α,β), which is
a plane of angles. Since α and β appear in Eq. (12)
inside sines and cosines, the solution set of Eq. (12)
in plane (α,β) is periodic every 2π rad along both
axes. This is why α and β were swept between −π
and +π when generating the curves as explained in
Section 4.1: all information is confined to this region
R = [−π,π] × [−π,π] of the plane. As a result of
this, the curves defined by Eq. (12) wrap at the lines
α = ±π and β = ±π, as illustrated in Figure 4b: e.g.,
a point W
1
marching along these curves and crossing
the vertical line α = π in positive direction as indi-
cated in Figure 4b would reappear as if coming from
α = −π, as indicated by point W
2
in the same figure.
Due to this wrapping, when retrieving the neigh-
bors of a point p
i
that is close to the borders of re-
gion R , one should not omit the wrapped neighbors
of such p
i
. For example: the neighbors to the right
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
330

of W
2
in Figure 4b are also neighbors of W
1
because,
due to wrapping, W
1
and W
2
are identified as the same
point. However, k-d tree methods for sorting and re-
trieving points do not work with wrapped angular co-
ordinates, and would fail to identify the neighbors to
the right of W
2
as neighbors of W
1
also.
To avoid this wrapping of angular coordinates,
Peidr
´
o et al. (2018) proposed using the sines s
j
and
cosines c
j
of angles as the variables of the problem,
instead of working with the angles j directly, impos-
ing the additional constraint: s
2
j
+c
2
j
= 1. This indeed
avoids the problem of wrapping and permits using k-
d trees to sort and search points, since the sines and
cosines do not wrap as their angles, but it also has the
drawback of doubling the dimension of the problem,
which increases computational time: each original an-
gular variable j is substituted by two variables (the
sine and cosine of j). In this paper, we propose an al-
ternative method for searching points using k-d trees
when these points have angular coordinates that wrap
along the axes of the ambient space, without having
to double the dimension of such a space by unfolding
each angle into its sine and cosine.
The alternative method is as follows: in line 3 of
Algorithm 1, when using k-d trees to retrieve the set
N of neighboring points inside a box B centered at p
i
,
one must “replicate” this box if it intersects any of the
wrapping lines α = ±π or β = ±π, defining “replica
boxes” whose centers are translated a distance of 2π
along the wrapped axes. More formally, let us define
an auxiliary variable σ
α
as follows:
σ
α
=
+1 if B intersects the line α = +π
−1 if B intersects the line α = −π
0 otherwise
(37)
In (37), it is assumed that B will not intersect simul-
taneously both lines α = π and α = −π since this box
should be small, as in Figure 4b. Let us define an anal-
ogous variable σ
β
, by substituting every α in (37) for
β. After defining σ
α
and σ
β
, one only has to change
B in Eq. (35) for B, which is defined as follows:
B
p
i
,r
α
,r
β
=
|σ
α
|
[
u=0
|σ
β
|
[
v=0
B
uv
(p
i
,r
α
,r
β
,σ
α
,σ
β
) (38)
where:
B
uv
(p
i
,r
α
,r
β
,σ
α
,σ
β
) = B
p
i
− 2π(uσ
α
,vσ
β
),r
α
,r
β
(39)
and where B is defined as in Eq. (36). Equation (38)
effectively defines the union of 2
|σ
α
|+|σ
β
|
wrapped
copies or replicas of box B, with each copy being
translated a distance of 2π along each axis in or-
der to cover all the wrapped regions intersected with
the original box B
00
. For example, Figure 4b shows
two boxes B
1
00
and B
2
00
, which intersect the wrapping
lines α = ±π or β = ±π, and their wrapped repli-
cas {B
1
00
,B
1
01
} and {B
2
00
,B
2
01
,B
2
10
,B
2
11
}, whose cen-
ters are translated as indicated by Eq. (39).
Then, in order to retrieve the wrapped neighbors
of p
i
using k-d trees, one has to perform a search for
all points in k-d tree T whose coordinates fall in the
intervals defined by each box B
uv
separately.
Continuing with Algorithm 1, after retrieving all
neighbors p
j
of current point p
i
(including possible
wrapped neighbors), then the sign of e
3i
for the cur-
rent point p
i
is compared to the sign of e
3 j
for each
neighbor. If e
3
changes sign between p
i
and any p
j
of its neighbors, a solution exists between them, and
this solution is approximated by a linear interpolation
between p
i
and p
j
, by enforcing e
3
= 0. This linear
interpolation is performed between lines 6-9 of Algo-
rithm 1. Note that not only the coordinates (α,β) are
interpolated, but also z (line 8). Recall that the values
of z and e
3
are stored in each companion point ˜p
i
of
p
i
computed during the first step of the method. Note
also that, in case of wrapping, when interpolating α
and β in lines 6-7, the values of (α
i
,β
i
) must be those
of point p
i
translated by the displacement of Eq. (39).
After this linear interpolation, an approximate so-
lution s
∗
is obtained (line 9 of Algorithm 1). This
solution is compared to all other solutions stored in S
so far (line 10), and if this solution is not similar to the
previously stored solutions (i.e., if it does not belong
to small boxes centered at other solutions, line 10),
then it is regarded as a new solution and it is stored
in S (line 15). Before storing a new solution, how-
ever, it is refined through Newton-Raphson method
for nonlinear systems, which converges very quickly
(in about 2-3 iterations) to a very accurate solution,
since the starting approximate solution obtained by
linear interpolation is already very close to the ex-
act one. Newton-Raphson method is applied between
lines 11-14, in which ∆s
∗
is the improvement of the
solution in each iteration, ε is a small threshold be-
low which further improvements are considered neg-
ligible (stop criterion), and F and J are the constraint
vector function and its Jacobian matrix, respectively,
which are defined as follows: F = [e
1
,e
2
,e
3
]
T
and
J =
∂e
1
/∂α ∂e
1
/∂β ∂e
1
/∂z
∂e
2
/∂α ∂e
2
/∂β ∂e
2
/∂z
∂e
3
/∂α ∂e
3
/∂β ∂e
3
/∂z
(40)
where e
i
are functions of s = [α,β,z]
T
, defined in
Eqs. (1)-(3). Since s
∗
will change little during New-
ton iterations, matrix J
−1
may be computed only once
before refining each solution s
∗
(right before line 11)
and kept constant in line 12, which saves computa-
tions without impeding fast convergence.
Solution of the Forward Kinematic Problem of 3UPS-PU Parallel Manipulators based on Constraint Curves
331

Figure 5: The two closed constraint curves for the example
of Section 5. The region enclosed by each curve has been
colored to better distinguish these curves under wrapping.
5 EXAMPLE AND DISCUSSION
Next, the efficiency and validity of the pro-
posed method will be demonstrated through
an example with the following parameters:
a
1
= [0.7, 2.45, 0]
T
, a
2
= [2.676, −1.379, 0]
T
, a
3
=
[−2.161,2.627,0]
T
, b
1
= [−2.255,1.099,2.728]
T
,
b
2
= [0.675,−2.347,0.532]
T
, b
3
=
[−1.935,−0.966,−1.953]
T
, θ = 0, ρ
1
= 5, ρ
2
= 4.5,
and ρ
3
= 4.631 (assume arbitrary units of length).
Our method will be run configured as follows:
∆α = ∆β = 0.0315738 rad, r
α
= r
β
= 0.0347312 rad,
ε = 0.000001 (threshold to stop Newton refinement).
For these parameters, the constraint curves ob-
tained by the proposed method are shown in Figure
5 in thick black lines. As this figure shows, this ex-
ample yields 18 real solutions, which are identified
by numbers 1-18 and small blue circles along these
curves. Note that, considering the wrapping of these
curves along the lines α = ±π and β = ±π, there are
two closed constraint curves. The sampling method
proposed in Section 4.1 is robust to the frequent case
in which these curves have multiple connected com-
ponents, which may pose troubles to alternative meth-
ods based on continuation for tracking and render-
ing these curves. In that case, continuation methods
should guarantee that a continuation starts from one
seed point belonging to each connected component,
in order to track all components (Gomes, 2014).
The values of (α,β,z) for these 18 solutions are
shown in Table 1. To check the correctness of these
solutions, these were back-substituted into Eqs. (1)-
(3) to solve ρ
i
from them, obtaining the original val-
ues (ρ
1
= 5, ρ
2
= 4.5, and ρ
3
= 4.631) with errors
smaller than 10
−9
in all cases. Also, to check if the
proposed method obtained all real solutions (without
missing solutions), these were also obtained by other
reliable methods for obtaining all solutions, which are
available as software packages: CUIK (Porta et al.,
2014) and Bertini (Bates et al., 2013), which use
branch-and-prune and homotopy methods, respec-
tively. Our method was coded in Java programming
language, and all three methods (ours, and the CUIK
and Bertini methods) were tested on a single-core
2GB RAM Ubuntu 32bit virtual machine with CUIK
preinstalled on it, running on a Mac Pro with a 3 GHz
8-Core Intel Xeon E5 processor and 16 GB RAM. All
three methods obtained 18 real solutions, and the so-
lutions obtained by our method coincide with those of
the other two methods up to the eighth decimal posi-
tion (CUIK and Bertini work with the cosine and sine
of angles intead of the angles themselves, so this com-
parison was made after computing the sine and cosine
of α and β for all 18 solutions displayed in Table 1).
Comparing times, our method took only 0.01 sec-
onds to generate the curves and obtain all 18 solutions
(steps 1 to 3), whereas CUIK and Bertini took 1.11
and 0.89 seconds to obtain these solutions, respec-
tively (CUIK and Bertini were run using their default
parameters). These times are averages of 10 runs for
each method, with standard deviations of 0.002, 0.02
and 0.08 seconds for our method, CUIK, and Bertini,
respectively. The times measured for the CUIK and
Bertini methods were extracted from the output files
generated by these packages, which are identified as
“User time in process” in CUIK, and “Track Time” in
Bertini. According to this comparison, our method is
roughly 100 times faster than other methods.
Nevertheless, CUIK and Bertini have other advan-
tages over our proposed method. For example, Bertini
can obtain also all nonreal solutions, which are not
physically possible but still are useful for learning
how they become real when approaching singulari-
ties (Peidr
´
o et al., 2019). In particular, the example
considered in this section has 10 nonreal solutions
besides the 18 real ones obtained by the proposed
method, and Bertini obtains all 28 solutions (real and
nonreal). Regarding CUIK, it can handle degenerate
cases which are otherwise elusive or very difficult to
solve, e.g., when a constraint curve degenerates into
a point solution, which would be overlooked by the
sampling method described in Section 4.1. Finally,
both CUIK and Bertini work with any parallel manip-
ulator, whereas our method is ad-hoc for 3UPS-PU
manipulators. However, we believe that this method
can be easily generalized and extended to more com-
plex manipulators, which is the topic of future work.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
332

Table 1: 18 real solutions for the example of Section 5.
# Solution α (rad) β (rad) z
1 -3.074015668 2.096303267 -1.560581389
2 -2.598732611 2.977271815 -1.218233476
3 2.259863227 2.298271789 1.836517445
4 2.296596123 1.825026909 -0.312209976
5 -3.076668574 -0.285479858 1.695349818
6 -2.521795906 -0.498199503 0.138552682
7 -0.944416244 1.279997012 -5.636730120
8 -0.618751656 0.447473831 2.571815016
9 -0.573215460 0.056916560 2.345009820
10 -0.139016511 -0.862859797 2.372701275
11 0.684167157 -1.425432943 4.033720688
12 -0.056524769 2.706168583 -2.505056890
13 -1.325219478 3.042199401 0.924688594
14 2.483381960 -1.670214061 0.751169173
15 1.065465274 -0.595531432 -2.109833757
16 0.950424577 -0.014348808 -2.409395862
17 1.203800574 1.274843283 -1.554851753
18 2.911141509 0.085737211 2.937707838
6 CONCLUSIONS
In this paper, we have presented a new method for
solving the forward kinematics of 3UPS-PU parallel
manipulators. The proposed method eliminates one
unknown, obtaining an equation that defines a con-
straint curve in the plane of the remaining unknowns.
This constraint curve is densely sampled and then
efficiently searched to find all real solutions of the
forward kinematics. This method makes use of k-
d trees and requires solving quartic polynomials at
most. Furthermore, explicit symbolic expressions of
the coefficients of these polynomials have been de-
rived, which are parameterized in terms of all kine-
matic parameters. This allows us to change the value
of any kinematic parameter and instantaneously re-
compute and update all solutions. This is not feasible
in general for elimination methods, which yield high-
degree polynomials that involve too large and compli-
cated expressions to be obtained symbolically.
The proposed method is about 100 times faster
than other methods, but has also a much more limited
scope, since it works only for 3UPS-PU robots. How-
ever, we are currently working on the extension of
this method to broader families of manipulators with
more degrees of freedom, succeeding to find “con-
straint manifolds” (analogous to the constraint curves
here analyzed) that can be efficiently sampled and
searched for all real solutions of the forward kinemat-
ics. Extension of this method to the complex domain
will also be explored, to find also nonreal solutions.
ACKNOWLEDGEMENTS
This research was funded by the Spanish government
through the project DPI2016-78361-R (AEI/FEDER,
UE): “Creaci
´
on de mapas mediante m
´
etodos de apari-
encia visual para la navegaci
´
on de robots”, and
by the Generalitat Valenciana through the project
AICO/2019/031: “Creaci
´
on de modelos jer
´
arquicos
y localizaci
´
on robusta de robots m
´
oviles en entornos
sociales”.
REFERENCES
Bates, D. J., Hauenstein, J. D., Sommese, A. J., and
Wampler, C. W. (2013). Numerically Solving Poly-
nomial Systems with Bertini. SIAM.
Caccavale, F., Siciliano, B., and Villani, L. (2003).
The tricept robot: dynamics and impedance con-
trol. IEEE/ASME Transactions on Mechatronics,
8(2):263–268.
Fattah, A. and Kasaei, G. (2000). Kinematics and dynam-
ics of a parallel manipulator with a new architecture.
Robotica, 18(5):535–543.
Gomes, A. J. (2014). A continuation algorithm for pla-
nar implicit curves with singularities. Computers &
Graphics, 38:365 – 373.
Hosseini, M. A. and Daniali, H.-R. M. (2011). Kinematic
analysis of tricept parallel manipulator. IIUM Engi-
neering Journal, 12(5):7–16.
Hu, B. (2014). Complete kinematics of a serial–parallel
manipulator formed by two tricept parallel manip-
Solution of the Forward Kinematic Problem of 3UPS-PU Parallel Manipulators based on Constraint Curves
333

ulators connected in serials. Nonlinear Dynamics,
78(4):2685–2698.
Innocenti, C. and Wenger, P. (2006). Position analysis of
the RRP-3(SS) multi-loop spatial structure. J. Mech.
Design, 128(1):272–278.
Joshi, S. and Tsai, L.-W. (2003). The kinematics of a class
of 3-dof, 4-legged parallel manipulators. J. Mech. De-
sign, 125(1):52–60.
Koll
´
ath, L., Kurekov
´
a, E., Plosku
ˇ
n
´
akov
´
a, L., and Beniak, J.
(2009). Non-conventional production machines. Sci-
entific Proceedings. SjF, STU Bratislava, pages 69–
75.
Liu, C. H. and Hsu, F.-K. (2007). Direct singular positions
of the parallel manipulator tricept. Proceedings of the
Institution of Mechanical Engineers, Part C: Journal
of Mechanical Engineering Science, 221(1):109–117.
Lu, Y., Hu, B., and Liu, P. (2007). Kinematics and dynam-
ics analyses of a parallel manipulator with three active
legs and one passive leg by a virtual serial mechanism.
Multibody System Dynamics, 17(4):229–241.
Neumann, K. (1988). Robot, US4732525A.
Peidr
´
o, A., Gil, A., Mar
´
ın, J. M., and Reinoso,
´
O. (2016).
A web-based tool to analyze the kinematics and sin-
gularities of parallel robots. Journal of Intelligent &
Robotic Systems, 81(1):145–163.
Peidr
´
o, A., Mar
´
ın, J. M., Reinoso,
´
O., Pay
´
a, L., and
Gil, A. (2019). Parallelisms between planar and
spatial tricept-like parallel robots. In Arakelian, V.
and Wenger, P., editors, ROMANSY 22 – Robot De-
sign, Dynamics and Control, pages 155–162, Cham.
Springer International Publishing.
Peidr
´
o, A., Reinoso, O., Gil, A., Mar
´
ın, J. M., and Pay
´
a,
L. (2018). A method based on the vanishing of
self-motion manifolds to determine the collision-free
workspace of redundant robots. Mechanism and Ma-
chine Theory, 128:84 – 109.
Pendar, H., Roozbehani, H., Sadeghian, H., and Zohoor, H.
(2008). Singularity analysis of a 3dof parallel manip-
ulator using infinite constraint plane method. Journal
of Intelligent and Robotic Systems, 53(1):21–34.
Porta, J. M., Ros, L., Bohigas, O., Manubens, M., Rosales,
C., and Jaillet, L. (2014). The cuik suite: Analyz-
ing the motion closed-chain multibody systems. IEEE
Robotics Automation Magazine, 21(3):105–114.
Press, W. H., Teukolsky, S. A., Vetterling, W. T., and Flan-
nery, B. P. (2007). Numerical Recipes: The Art of
Scientific Computing (3rd Edition). Cambridge Uni-
versity Press.
Siciliano, B. (1999). The tricept robot: Inverse kinematics,
manipulability analysis and closed-loop direct kine-
matics algorithm. Robotica, 17(4):437–445.
Simionescu, P. A. (2014). Computer-aided graphing and
simulation tools for AutoCAD users. CRC Press.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
334
