
Simulation of near Infrared Sensor in Unity for Plant-weed
Segmentation Classification
Carlos Carbone
a
, Ciro Potena
b
and Daniele Nardi
Department of Computer, Control and Management Engineering, Sapienza University of Rome, Via Ariosto 25, Rome, Italy
Keywords:
Unity Engine, Near Infrared, Convolutional Neural Network, Plant-weed Segmentation Classification.
Abstract:
Weed spotting through image classification is one of the methods applied in precision agriculture to increase
efficiency in crop damage reduction. These classifications are nowadays typically based on deep machine
learning with convolutional neural networks (CNN), where a main difficulty is gathering large amounts of
labeled data required for the training of these networks. Thus, synthetic dataset sources have been developed
including simulations based on graphic engines; however, some data inputs that can improve the performance
of CNNs like the near infrared (NIR) have not been considered in these simulations. This paper presents a
simulation in the Unity game engine that builds fields of sugar beets with weeds. Images are generated to
create datasets that are ready to train CNNs for semantic segmentation. The dataset is tested by comparing
classification results from the bonnet CNN network trained with synthetic images and trained with real images,
both with RGB and RGBN (RGB+near infrared) as inputs. The preliminary results suggest that the addition
of the NIR channel to the simulation for plant-weed segmentation can be effectively exploited. These show a
difference of 5.75% for the global mean IoU over 820 classified images by including the NIR data in the unity
generated dataset.
1 INTRODUCTION
Precision agriculture is the use of techniques that pro-
vide key information from plant crops to improve de-
cision making about the use of the resources avail-
able in crop management (ISPA, 2020). In this area
there has been an increase in research development in
the recent years (Stafford, 2000; Khanal et al., 2017;
Patr
´
ıcio and Rieder, 2018; Duhan et al., 2017; Car-
bone et al., 2018).
One of the main challenges in precision agricul-
ture is to obtain the location of weeds that need to
be removed to diminish possible quality loses in the
main plants being grown (Lottes et al., 2018). The
first step to obtain the location of such weeds is to
have a reliable system that can identify them (Lottes
et al., 2018). The most common system to accomplish
this type of task is image-based classification through
Deep Neural Networks. In particular, Convolutional
Neural Networks (CNNs) are one of the methods that
currently provide the most promising results for this
purpose (Krizhevsky et al., 2017; Potena et al., 2017;
a
https://orcid.org/0000-0001-5615-0225
b
https://orcid.org/0000-0003-2395-2170
Carvajal et al., 2017).
As any machine learning based method, CNNs re-
quire accurately labeled data to develop that can reli-
ably identify plants and weeds in an image (Bah et al.,
2018). The data required are usually images taken in
the field in controlled environments. Acquisition of
these data requires a lot of time and effort to then such
data need to be manually labeled by hand (Bah et al.,
2018). To ease such difficult task, simulation environ-
ments based on graphic engines have been developed
to generate synthetic datasets for CNN training (Ci-
cco et al., 2016). However, these simulators, to the
best of our knowledge, have not included the simu-
lation of the near-infrared (NIR) sensor, which have
been proven quite effective on crop images (Milioto
et al., 2017).
The objective of our research is to create a sim-
ulation environment that includes the near-infrared
channel to generate a dataset for CNN training. This
is accomplished through a sugar beet field simulated
along with weeds in the Unity game engine (Xie,
2012), hereinafter referred to as ”Unity”, using tex-
tures gathered with a real world sensor. This simu-
lator then generates images to train a selected CNN
and compare its performance against the same net-
Carbone, C., Potena, C. and Nardi, D.
Simulation of near Infrared Sensor in Unity for Plant-weed Segmentation Classification.
DOI: 10.5220/0009827900810090
In Proceedings of the 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2020), pages 81-90
ISBN: 978-989-758-444-2
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
81

work trained with a dataset of real images. Our exper-
iments show that the performance result is improved
by including the NIR data. Additionally, the simula-
tor could be adjusted in future investigations for other
types of plants. This would require additional tex-
tures and adjustments to the 3D meshes. The simula-
tor could also be modified to include more points of
views representing sensors mounted in different type
of robots like ground robots or unmaned aerial vehi-
cles (UAVs).
The rest of this paper is structured as follows: Sec-
tion II presents the state of the art for plant-weed
classification using CNNs and for simulation environ-
ments developed to generate CNNs training datasets.
Section III presents the developed simulation environ-
ment in Unity along with texture gathering with a real
sensor. Section IV explains the tests specifications.
Section IV presents the selected convolutional neural
network. Section V presents the results, the main key
performance indicators and the discussion about the
values obtained. Finally, section VI presents the con-
clusions and future works.
2 RELATED WORK
In this section we present the background state of
the art by addressing first research developments for
Plant-weed classification using convolutional neural
networks and then for Simulation environments that
aim to support data generation for deep learning re-
searches.
2.1 Plant-weed Classification using
Convolutional Neural Networks
The usage of UAVs in precision agriculture is one of
the current commercial trends for these robots as well
as for research approaches (Kolodny, 2017; Carbone
et al., 2018). In (Sa et al., 2018a), an approach to
achieve reliable plant-weed classification with UAVs
hardware constraints was developed. SegNet was the
network used with a Jetson TX2 integrated on the
UAV. Efforts to include multispectral sensor data in
convolutional neural network (CNN) training were
further explored in (Sa et al., 2018b). Another ap-
proach that reduces the requirements of the network
is presented in (Lottes and Stachniss, 2017). Here
a semi-supervised approach is presented exploiting
knowledge about the common arrangements of crops.
In (Lottes et al., 2018) a CNN was developed with
an encoder-decoder structure that includes spatial in-
formation within sequences of images. This approach
achieved a generalized improvement in results as it
performs well on new unseen fields without the need
to retrain the model. Considering spatial information
is indeed a desirable feature in agricultural inspec-
tions, as they are often performed by robots that need
to gather a sequence of images to cover the inspection
of crops.
In (Fawakherji et al., 2019) an approach of using
two networks in sequence is developed to do semantic
segmentation classification. The first network being
based on encode-decoder architecture to classify con-
nected patches of plant instances from the soil, then
the second network does the classification labeling.
The results obtained were accurate enough in cases
were the images had challenging features. Further-
more, (Li et al., 2019) make an approach in cases
where the weeds are dense and overlap the plants,
using ResNet-10 as base with the Adaptive Affinity
Fields method.
2.2 Simulation Environments
This research builds upon the work ”Automatic
Model Based Dataset Generation for Fast and Accu-
rate Crop and Weeds Detection” (Cicco et al., 2016),
which proposed the use of images from a simula-
tion environment to enhance the effectiveness of CNN
for crop-weed classification using Unreal Engine 4
(Sanders, 2016), hereinafter referred to as ”Unreal”.
The new feature of our research, which switches from
Unreal Engine to Unity, is the inclusion of the sim-
ulation NIR data. Unity was chosen due to its better
compatibility and accessibility on the Linux operating
system. This will ease future research that requires
robotics libraries that are mostly supported in Linux
like the robotic operating system (ROS). To the best
of our knowledge, the inclusion of the NIR data for
plants in simulation environments based in graphics
engines has not been done before. In particular, the
research done in (Cicco et al., 2016) includes only the
red-green-blue (RGB) data for synthetic dataset gen-
eration.
Video games have been used directly as source of
training datasets for machine learning research. In
(Richter et al., 2016), pixel output from the game as
well as commands being issued were used to generate
large datasets for machine learning research purposes.
In (Shafaei et al., 2016) output images of cityscapes
were generated and tested by comparing classification
results of a CNN trained with the generated images
and real images.
Further studies have included the customization of
the environment simulated by using video game en-
gines instead of video games with constraints defined
by the game design. In (Kim et al., 2019), the Unreal
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
82

was used to simulate specific orientations of cars to
train a model that works with video data from the real
world; they highlight that the main problem in this
domain is the lack of labeled imagery which can be
generated automatically within Unreal. A similar ap-
proach was pursued with Unity in (Kaur et al., 2018)
where the data was used to train a CNN as part of
a system that provides drive assistance. Moreover,
in (Yang et al., 2016), also develops a study in the
car domain in Unity but with the focus of using the
generated data to test sensor reaction instead of CNN
training.
In (Acker et al., 2017) a cellular automation is im-
plemented with Unreal to generate random pedestrian
and vehicle movement to generate imagery that inter-
faces with a neural network through UnrealCV. The
main idea was to generate an environment that had its
movement established of an abstract level. Similarly,
in (Hattori et al., 2015) a simulator for pedestrian be-
havior is developed. Similarly, in (Zhao et al., 2019)
presents a Unity simulation for the training of a CNN
for occupancy detection in a room which reduced the
average localization error by 36.54% and 11.46% for
private and public scenarios respectively using a real
testbed.
In (Juliani et al., 2018) a platform for deep rein-
forcement learning is developed in Unity with the pur-
pose of making available an open source simulation of
learning agents in an environment with realistic visu-
als.
In (Akiyama et al., 2018) presents a method with-
out a graphic engine that generates chart images to
support studies in information visualization. A web
tool is developed to synthetically and randomly gener-
ate the charts based on probability distributions func-
tions. These charts are then rendered in PNG format.
The main contribution of this paper is the inclu-
sion of the near infrared (NIR) data in a simulation
environment developed in Unity that can build proce-
dural fields of sugar beets and weeds including RGB
and NIR data to generate images to be included as part
of a CNN training dataset.
3 INTEGRATED SIMULATION
ENVIRONMENT
In this research, Unity is the graphic engine used to
develop the simulation environment to generate the
synthetic dataset. Unity is designed to develop video
games by providing scripting functionality along with
realistic illumination. In Unity, we developed a real-
istic procedural crop field that randomizes parameters
of its generated plants and weeds.
3.1 Sensor and Textures
Texture images and 3D meshes are required to gener-
ate the plants and weeds in Unity. Cropped images of
real plants are used as textures which are cropped to
fit into the 3D meshes through UV mapping which is
the system that maps the pixels from the images to the
3D mesh. These images were gathered using the JAI
AD-130 GE camera which provides input from a visi-
ble color channel from 400-700nm and a near infrared
(NIR) channel from 750-900+nm simultaneously.
The plant images were taken in a small sugar beet
field in the city of Ancona in Italy with the support
of the personnel of the Agenzia Servizi al settore
Agroalimentare delle Marche (ASSAM). In total, 8
textures were gathered, a cropped example image is
shown in Figure 1. The weed textures were extracted
from the 2016 Sugar Beets Dataset Recorded at Cam-
pus Klein Altendorf in Bonn, Germany, hereinafter
referred to as ”Bonn Dataset”. A total of 50 weed
textures were created by cropping the RGB and NIR
images using the masks in the labeled images, an ex-
ample is shown in Figure 2.
(a) RGB.
(b) NIR.
Figure 1: Sugar beet leaf textures, RGB on the left, NIR on
the right.
3.2 Unity Engine
Once the texture images are obtained they must be
placed in what is called materials in Unity with ap-
propriate shader coding. The shader is the part of the
simulator that takes the texture inputs and places them
on top of the 3D meshes to render the appropriate pix-
els in the screen. Then the material is an instance of
the shader code where textures images are specified.
Two main shaders are used in this simulation: one
with transparency and double side rendering (used for
plants and weeds), and one that shows raw colors to
the screen excluding transparent pixels (used to create
the masks for the labeled images).
For the plants, the textures are applied in a rect-
angular mesh with a skeleton that bends the mesh re-
sembling a bent leaf. With the previously mentioned
Simulation of near Infrared Sensor in Unity for Plant-weed Segmentation Classification
83

(a) RGB. (b) Labeled.
(c) Cropped.
Figure 2: Weeds in sugar beet field, original RGB on the
left, labeled image on the right, Green labels are the plants
and red labels are the weeds, and texture showing only the
weeds cropped at the bottom.
shaders only the leaf pixels are visible in the mesh,
visually turning the bent rectangle to a leaf. With the
same shaders, the weed textures are placed in a simple
square due to the very small shapes of the weeds.
With the plant and weed meshes ready to be
spawned, a script is created to procedurally generate
the field with some randomized parameters to create
a high variety of plants and weeds. The size and rota-
tion of the sugar beet leaves have random variations to
have similar shapes compared to the real images. The
weeds are randomly placed as planes on the ground
over the field with their rotation being randomized.
A field is shown in Figure 3, and images taken from
the camera in the generated level are shown in Fig-
ure 4, the RGB taken images are also shown in Figure
5 where the brightness has been manually adjusted
for demonstration purposes for this paper. During the
image generation the following steps are taken repeat-
edly until the desired amount of images is generated:
1. The camera is placed in a fixed position it takes a
screenshot of the field setup with RGB data.
2. The field switches to the NIR data by changing
the Unity materials and the camera takes another
screenshot.
3. The field switches to the label mask data by
changing the Unity materials and the camera takes
another screenshot.
4. The intensity of the global illumination is slightly
varied with random values, the field is replaced
with a completely new one and the camera is
moved to a new random position within the crop.
5. Above steps are then repeated to generate more
images.
The close up images present a side by side com-
parison of the Unity synthetic images with the real
images of both RGB and near infrared data. The
Unity images show similar features, plant sizes and
illumination that are essential to get good classifica-
tion results for real images. This allowed to gener-
ate a synthetic dataset of plant-weed images includ-
ing the RGB view, the NIR view and the labeled
view that holds a similar aspect to the real dataset.
The specific properties of the datasets built will be
introduced in Section 4. Additionally, the dataset
can be accessed in https://github.com/CSCarbone07/
SPQR AgriSim Unity.
(a) Unity RGB field.
(b) Unity NIR field.
(c) Unity labeled masks field.
Figure 3: Sugar beet leaf field: RGB (above), NIR and la-
beled masks (below).
3.3 Convolutional Deep Learning
Neural Network
The deep neural network used is: ”Bonnet: An
Open-Source Training and Deployment Framework
for Semantic Segmentation in Robotics” (Milioto and
Stachniss, 2019), hereinafter referred to as ”Bonnet”.
This network is used with its default configuration
for plant-weed classification, and some modifications
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
84
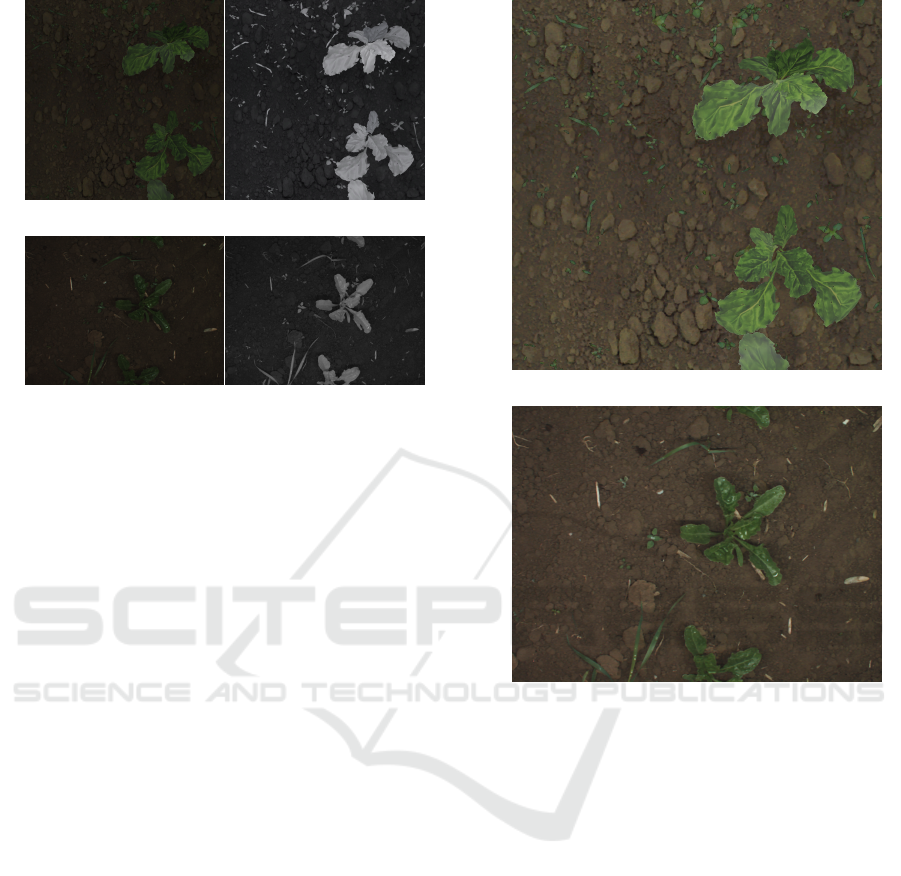
(a) Unity RGB image. (b) Unity NIR image.
(c) Real RGB image. (d) Real NIR image.
Figure 4: Images taken from camera for synthetic dataset
(above) compared to real images (below): RGB to the left,
NIR to the right.
were done to the code to include a fourth channel to
include the input NIR data. The research reported a
mean intersection over union (IoU) of 80.1% for crop-
weed classification and 98.5% for the mean accuracy.
The code is also adapted to be mounted on robots with
ROS if necessary since the network was released as an
open source tool to ease its usage on robotics applica-
tions.
The network is based on an encoder-decoder ar-
chitecture, and the plant weed configuration has a
9 layer configuration with 3 down-sample blocks of
8, 16 and 64 filters respectively and 3 blocks of up-
sample of 32, 16 and 8 filters respectively. This con-
figuration setting was developed to work with the real
data set that is used in this research, Bonn Dataset
(Chebrolu et al., 2017), which is the dataset used for
testing in this research.
4 TESTS
This section explains the key features of the datasets
used for the training of the deep learning neural net-
work. A summary of these features is presented in
Table 1.
The synthetic dataset was generated using the
level built in Unity, creating 1034 images with a size
of 1024x1024 pixels, which is one of the common op-
tions for Unity textures. The mentioned amount of
images was generated to have an amount of images
close to the half of the images available in the Bonn
Dataset, which are used as the source of real images
(a) Unity RGB enlightened image.
(b) Real RGB enlightened image.
Figure 5: Enlightened RGB images from Figure 4.
for training and performance evaluation. This dataset
has a total 1854 images, where 1034 are used as the
real dataset for the training of the CNN by fitting them
into 734 for the train images, 150 for the validation
images and 150 for the test images as shown in Table
1. This leaves 820 real images which were used for
the performance evaluation of each trained CNN us-
ing each dataset. The Unity synthetic dataset has the
same distribution of images as the real dataset for the
training of the CNN. Then, a mixed dataset is built
where 300 image of the real dataset are added and
distributed equally for the training, validation and test
along with the synthetic dataset distribution for the
CNN training as shown in the third column in Table
1.
Each dataset built has an RGB and an RGBN ver-
sion and both share the same distribution of images.
The labels are defined as ground, weed and plant in all
the datasets. All the textures were gathered with the
same sensor model used to take the real images in the
Bonn Dataset. The pixels for the real dataset training
Simulation of near Infrared Sensor in Unity for Plant-weed Segmentation Classification
85

Table 1: Datasets features.
Feature for RGB and RGBN input Real Unity Unity + Real
Dimensions (WxH pixels) 1296x966 1024x1024 512x512
Train (number of images) 734 734 734 Unity +100 real
Validation (number of images) 150 150 150 Unity +100 real
Test (number of images) 150 150 150 Unity +100 real
are the same as the sensor output, for the Unity dataset
the output of 1024x1024 pixels is used, and for the
mixed dataset the images were reduced to 512x512
pixels to have the same dimensions. Both the syn-
thetic and the mixed dataset have a power of two size
of images which is a common property for Unity im-
ages. The each training using each dataset had at least
200 epochs with the aim of running the training until
the gain in accuracy was negligible.
5 RESULTS
The results for each training are presented using the
IoU and the accuracy as key performance indicator
(KPI). The former is calculated through Equation 1
for each label: N is number of pixels of a classified
image, T
pi
is the true positive where a pixel is clas-
sified correctly for a given label. The sum of these
being equivalent to the intersection of the classified
image with the ground truth image for the chosen la-
bel. Then, the T
pi
, F
pi
and F
ni
are the True positive,
False positive and False negative respectively for a la-
bel. Then the IoU mean is obtained by calculating an
average of the IoU mean for each label on a given im-
age, hence the total IoU mean is calculated by taking
a mean over all the IoU means of the 820 classified
images for performance evaluation.
IoU
label
=
N
∑
i=1
T
pi
T
pi
+ F
pi
+ F
ni
(1)
The second KPI used is the accuracy which is cal-
culated using Equation 2. Again, this is calculated for
each label and then a mean is calculated per image
and a mean over the 820 images is calculated as well
for this performance evaluation. The variables are the
same ones in Equation 1 with the addition of the T
ni
which is the true negative when a pixel does not con-
tain a certain label in both the classified image and
the ground truth. Each KPI result is then multiplied
by 100 to have the results in percentages.
Accuracy
label
=
N
∑
i=1
T
pi
+ T
ni
T
pi
+ T
ni
+ F
pi
+ F
ni
(2)
Table 2 and 3 were obtained by using the se-
lected KPIs. The former represents the overall re-
sult after calculating the IoU and accuracy means for
the classification over 820 labeled images using RGB
(red-green-blue) and RGBN (red-green-blue-near in-
frared) inputs from Bonn Dataset (Chebrolu et al.,
2017). The results of table 2 are also presented in Fig-
ure 6 and 7 for better visualization. Table 3 presents
the KPIs of interest for the image that got the highest
difference between RGB and RGBN mean IoU using
the synthetic (Unity) trained network. The columns
represent each classification result for said image us-
ing each trained CNN with each dataset. This image
is shown in Figure 8, which also presents the clas-
sification ground truth (plant green and weed red la-
beled image) and the result classification (plant green
and weed blue labeled image) using the trained net-
work for RGB and RGBN inputs using the 3 training
datasets: real, Unity and Unity+real.
5.1 Discussion
As it can be seen in Table 2 and 3, an increase in mean
IoU and mean accuracy is achieved by adding the in-
put of the NIR channel for the deep learning network
training. As an overall, the mean IoU and mean Accu-
racy (lines 8, 9, 16 and 17 of the table) has a difference
of 5.75% and 0.64% respectively for the trained neu-
ral network using the Unity training dataset shown in
the third column of Table 2. The same trend is found
in the classification results using the other trained net-
works using the real and Unity+real dataset, second
and fourth column respectively. This means that the
NIR data can increase considerably the classification
results, specially for the synthetic dataset as this pre-
sented the biggest improvement compared to the other
dataset trained networks.
Table 2 also includes the results for each class:
Plant, Weed, Ground. In these lines (2-13), it can be
seen that the best performance is for the ground fol-
lowed by the plants and then the weeds, which follows
an order of pixels. This is because the ground data
is considerably different from the other two classes.
Additionally, there was more training and classifica-
tion pixel data available for the ground and less for
plants and weeds. Therefore, the classification results
are in favor of soil ground classification compared to
plant and weed classification. Additionally, it is worth
mentioning that the available labeled images from the
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
86
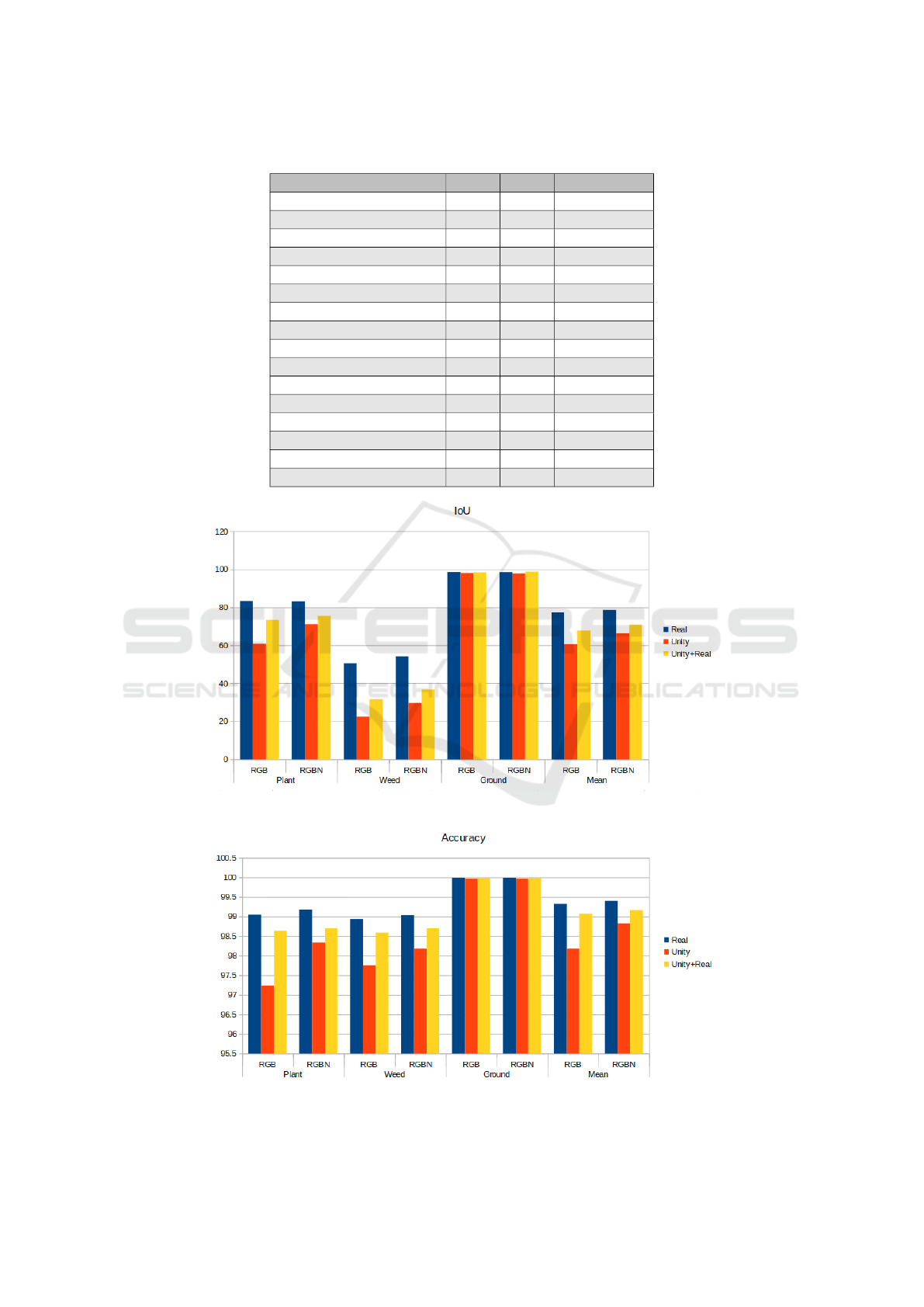
Table 2: Classification mean results (in percentage) for classification over 820 images used for evaluation performance.
Method Real Unity Unity + Real
Plant IoU RGB 83.35 60.83 73.51
Plant IoU RGBN 83.07 71.20 75.61
Weed IoU RGB 50.49 22.54 31.57
Weed IoU RGBN 54.09 29.57 36.82
Ground IoU RGB 98.56 98.14 98.41
Ground IoU RGBN 98.53 97.97 98.73
mean IoU RGB 77.47 60.50 67.83
mean IoU RGBN 78.56 66.25 70.38
Plant Accuracy RGB 99.04 97.23 98.63
Plant Accuracy RGBN 99.18 98.33 98.70
Weed Accuracy RGB 98.93 97.75 98.59
Weed Accuracy RGBN 99.03 98.18 98.70
Ground Accuracy RGB 99.99 99.97 99.99
Ground Accuracy RGBN 99.99 99.97 99.99
mean Accuracy RGB 99.32 98.18 99.07
mean Accuracy RGBN 99.40 98.82 99.16
Figure 6: IoU results from table 2 for each class.
Figure 7: Accuracy results from table 2 for each class.
Simulation of near Infrared Sensor in Unity for Plant-weed Segmentation Classification
87
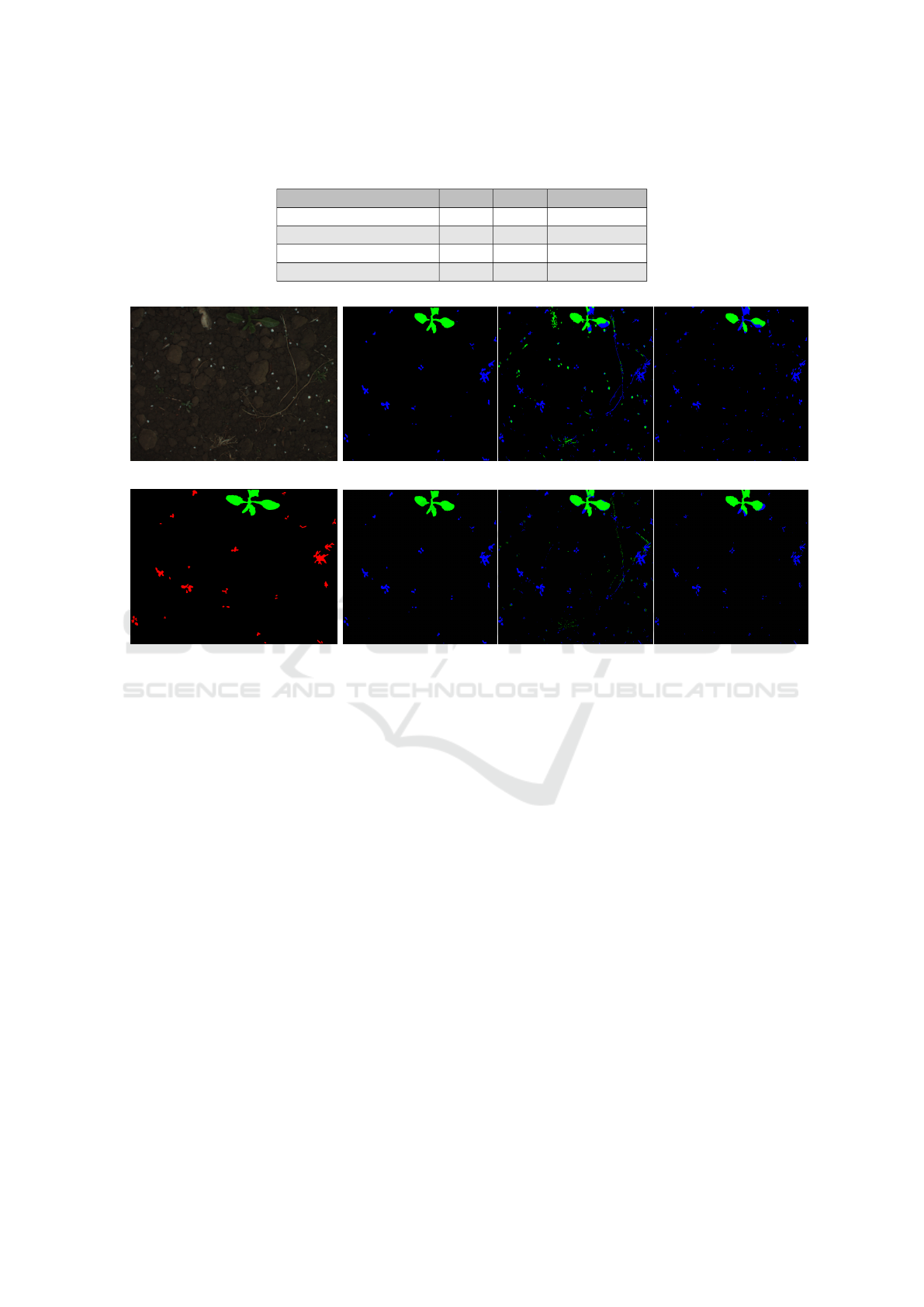
Table 3: Classification results (in percentage) for selected image with a high difference between RGBN and RGB mean IoU
score using the Unity trained network.
Method Real Unity Unity + Real
mean IoU RGB 81.56 57.68 59.45
mean IoU RGBN 83.38 74.03 71.93
mean Accuracy RGB 99.76 99.14 99.29
mean Accuracy RGBN 99.79 99.58 99.62
(a) Real RGB image.
(b) Real (RGB).
(c) Unity (RGB).
(d) Unity+real (RGB).
(e) Real image ground truth.
(f) Real (RGBN).
(g) Unity (RGBN).
(h) Unity+real (RGBN).
Figure 8: Classified image with high difference between RGBN and RGB mean IoU using the Unity trained network. First
column present original image and ground truth labeled image. Second column presents the classification result using the real
dataset trained network. The third column presents classification result for the Unity trained network. And the fourth column
presents the classification result for the Unity+real trained network. Green labels plants, red labels weed in ground truth and
blue labels weeds in network classified image.
Bonn Dataset are in a slightly younger state compared
to the used for the synthetic generated images, which
also creates spread results compared to previous re-
searches (Cicco et al., 2016).
The mean IoU results obtained using the real im-
ages, shown in the second column of Table 2, are
in line with previous reported results for plant-weed
classification using Bonnet, these are 80.1% for the
mean mIoU and 98.5% for the mean accuracy (Mil-
ioto and Stachniss, 2019). It is worth noting that the
difference of mean IoU between the RGB and RGBN
for the real dataset training is of 1.09% and 0.08% for
the mean IoU and mean Accuracy respectively could
be considered small. Multiple trends for these val-
ues have been found by previous researches when the
NIR is added as an input for plant-weed classifica-
tion. (Milioto et al., 2017) reported multiple results
with differences of mean IoU ranging between 2.98%
and 27.94% and (Deng et al., 2014) reports a negative
difference of 26.27%, meaning that there are cases
where the extra data from the NIR could bring con-
fusion to the neural network.
Table 3 and Figure 8 show a case where the NIR
makes the big improvement for plant-weed classifi-
cation. Here the biggest change of interest is the
mean IoU where a difference of 2.65% and 18.7%
is achieved for the real dataset trained network and
Unity trained network respectively.
As both Table 2 and 3 suggest, the improvement
trend by including the NIR input data is more promi-
nent in the synthetic dataset method, meaning that
this contribution is remarkable for simulation envi-
ronments developed to generate synthetic dataset.
In previous research ”Automatic Model Based
Dataset Generation for Fast and Accurate Crop and
Weeds Detection” using Unreal as the simulation en-
vironment to generate the synthetic dataset results ob-
tained are up to 60.2% and 99.5% for the mean IoU
and mean accuracy respectively (Cicco et al., 2016).
This result was obtained by using also a set of the im-
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
88

ages included in the Bonn Dataset (Chebrolu et al.,
2017) using a modified version of the RGB SegNet
as the convolutional neural network (CNN) with a
synthetic generated dataset of RGB images resized to
480x360 pixels (Badrinarayanan et al., 2015).
6 CONCLUSIONS AND FUTURE
WORK
The main contribution of this paper is the addition
of the near infrared sensor in a simulation environ-
ment to generate datasets of plant-weed images that
include red, green, blue and near infrared data. The
results were tested against real data with a convolu-
tional neural network (CNN) designed for plant-weed
segmentation classification. The classification is eval-
uated using the mean intersection over union (IoU)
and the accuracy: both values are increased by adding
the near infrared data, with the most prominent im-
provement obtained by using the synthetic data.
The results obtained suggests this method to be
bases for the simulation of other type of plants and
weeds with the purpose of providing a reliable source
of data to generate datasets for CNN training. Simu-
lation parameters as size of plants, illumination inten-
sity and color variations can be adjusted to fit a spe-
cific environmental condition, and thus achieve simi-
lar classification results. Additional type of plants and
weeds can be added as well by adding new textures or
new 3D meshes to depending on their complexity. If
the new plant general shape is the same, it would re-
quire only additional textures and simple adjustments
to the 3D meshes. The developed simulator gener-
ates sugar beets leaves using a simple rectangular bent
mesh which then take the shape of the leaf through a
transparency shader that only renders the pixels with
leaf pixels. Then, carrots, for example, could be eas-
ily added since they have also a bent stem with leaves
that follow to some degree the pattern of the bent
stem. For some studies simple new textures could be
enough and if more detail is required then extra bent
meshes could be spawned on top of the main stem to
have more precise leave shapes. Plants with consid-
erable different shapes like sunflowers could also be
added by adding appropriate meshes that follow the
general shape of the plant and their required textures.
The simulator could also be modified to include
more points of views representing sensors mounted in
different type of robots like ground robots or UAVs.
These robots could also be added in the simulator to
perform inspection patterns and collect data for ma-
chine learning training and testing.
REFERENCES
Acker, O. V., Lachish, O., and Burnett, G. (2017). Cel-
lular automata simulation on FPGA for training neu-
ral networks with virtual world imagery. volume
abs/1711.07951.
Akiyama, R., Araujo, T., Chagas, P., Miranda, B., Santos,
C., Morais, J., and Meiguins, B. (2018). Synthetic
chart image generator: An application for generating
chart image datasets. In 2018 22nd International Con-
ference Information Visualisation (IV). IEEE.
Badrinarayanan, V., Kendall, A., and Cipolla, R.
(2015). Segnet: A deep convolutional encoder-
decoder architecture for image segmentation. CoRR,
abs/1511.00561.
Bah, M., Hafiane, A., and Canals, R. (2018). Deep learn-
ing with unsupervised data labeling for weed detec-
tion in line crops in UAV images. Remote Sensing,
10(11):1690.
Carbone, C., Garibaldi, O., and Kurt, Z. (2018). Swarm
robotics as a solution to crops inspection for precision
agriculture. KnE Engineering, 3(1):552.
Carvajal, J. A., Romero, D. G., and Sappa, A. D. (2017).
Fine-tuning based deep convolutional networks for
lepidopterous genus recognition. In Progress in Pat-
tern Recognition, Image Analysis, Computer Vision,
and Applications, pages 467–475. Springer Interna-
tional Publishing.
Chebrolu, N., Lottes, P., Schaefer, A., Winterhalter, W.,
Burgard, W., and Stachniss, C. (2017). Agricultural
robot dataset for plant classification, localization and
mapping on sugar beet fields. The International Jour-
nal of Robotics Research, 36(10):1045–1052.
Cicco, M. D., Potena, C., Grisetti, G., and Pretto, A.
(2016). Automatic model based dataset generation for
fast and accurate crop and weeds detection. volume
abs/1612.03019.
Deng, W., Zhao, C., and Wang, X. (2014). Discrimina-
tion of crop and weeds on visible and visible/near-
infrared spectrums using support vector machine, ar-
tificial neural network and decision tree. Sensors &
Transducers, 26:26–34.
Duhan, J. S., Kumar, R., Kumar, N., Kaur, P., Nehra, K., and
Duhan, S. (2017). Nanotechnology: The new perspec-
tive in precision agriculture. Biotechnology Reports,
15:11–23.
Fawakherji, M., Youssef, A., Bloisi, D., Pretto, A., and
Nardi, D. (2019). Crop and weeds classification for
precision agriculture using context-independent pixel-
wise segmentation. In 2019 Third IEEE International
Conference on Robotic Computing (IRC). IEEE.
Hattori, H., Boddeti, V. N., Kitani, K., and Kanade, T.
(2015). Learning scene-specific pedestrian detectors
without real data. In 2015 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
3819–3827.
ISPA (2020). Home | international society of precision agri-
culture.
Juliani, A., Berges, V., Vckay, E., Gao, Y., Henry, H., Mat-
Simulation of near Infrared Sensor in Unity for Plant-weed Segmentation Classification
89

tar, M., and Lange, D. (2018). Unity: A general plat-
form for intelligent agents. CoRR, abs/1809.02627.
Kaur, P., Sobti, R., and Khamparia, A. (2018). Simulation
and deep cnn based architecture for validation of in-
telligent automotive functions. In 2018 International
Conference on Advances in Computing, Communica-
tions and Informatics (ICACCI), pages 2344–2348.
Khanal, S., Fulton, J., and Shearer, S. (2017). An overview
of current and potential applications of thermal remote
sensing in precision agriculture. Computers and Elec-
tronics in Agriculture, 139:22–32.
Kim, T. S., Peven, M., Qiu, W., Yuille, A., and Hager,
G. D. (2019). Synthesizing attributes with unreal en-
gine for fine-grained activity analysis. In 2019 IEEE
Winter Applications of Computer Vision Workshops
(WACVW), pages 35–37.
Kolodny, L. (2017). Fixed-wing drones not quite
taking off in commercial market, a new
DroneDeploy study finds \textbar TechCrunch.
https://techcrunch.com/2016/08/15/fixed-wing-
drones-not-quite-taking-off-in-commercial-market-
a-new-dronedeploy-study-finds/. Visited on 2017-
08-09.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2017). Im-
ageNet classification with deep convolutional neural
networks. Communications of the ACM, 60(6):84–90.
Li, N., Zhang, X., Zhang, C., Guo, H., Sun, Z., and
Wu, X. (2019). Real-time crop recognition in trans-
planted fields with prominent weed growth: A visual-
attention-based approach. IEEE Access, 7:185310–
185321.
Lottes, P., Behley, J., Milioto, A., and Stachniss, C. (2018).
Fully convolutional networks with sequential infor-
mation for robust crop and weed detection in preci-
sion farming. IEEE Robotics and Automation Letters,
3(4):2870–2877.
Lottes, P. and Stachniss, C. (2017). Semi-supervised online
visual crop and weed classification in precision farm-
ing exploiting plant arrangement. In 2017 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS). IEEE.
Milioto, A., Lottes, P., and Stachniss, C. (2017). Real-time
semantic segmentation of crop and weed for precision
agriculture robots leveraging background knowledge
in cnns. CoRR, abs/1709.06764.
Milioto, A. and Stachniss, C. (2019). Bonnet: An Open-
Source Training and Deployment Framework for Se-
mantic Segmentation in Robotics using CNNs. In
Proc. of the IEEE Intl. Conf. on Robotics & Automa-
tion (ICRA).
Patr
´
ıcio, D. I. and Rieder, R. (2018). Computer vision and
artificial intelligence in precision agriculture for grain
crops: A systematic review. Computers and Electron-
ics in Agriculture, 153:69–81.
Potena, C., Nardi, D., and Pretto, A. (2017). Fast and ac-
curate crop and weed identification with summarized
train sets for precision agriculture. In Intelligent Au-
tonomous Systems 14, pages 105–121. Springer Inter-
national Publishing.
Richter, S. R., Vineet, V., Roth, S., and Koltun, V. (2016).
Playing for data: Ground truth from computer games.
In Leibe, B., Matas, J., Sebe, N., and Welling, M.,
editors, Computer Vision – ECCV 2016, pages 102–
118, Cham. Springer International Publishing.
Sa, I., Chen, Z., Popovic, M., Khanna, R., Liebisch, F., Ni-
eto, J., and Siegwart, R. (2018a). weedNet: Dense
semantic weed classification using multispectral im-
ages and MAV for smart farming. IEEE Robotics and
Automation Letters, 3(1):588–595.
Sa, I., Popovi
´
c, M., Khanna, R., Chen, Z., Lottes, P.,
Liebisch, F., Nieto, J., Stachniss, C., Walter, A., and
Siegwart, R. (2018b). WeedMap: A large-scale se-
mantic weed mapping framework using aerial multi-
spectral imaging and deep neural network for preci-
sion farming. Remote Sensing, 10(9):1423.
Sanders, A. (2016). An Introduction to Unreal Engine 4.
CRC Press.
Shafaei, A., Little, J. J., and Schmidt, M. (2016). Play
and learn: Using video games to train computer vi-
sion models.
Stafford, J. V. (2000). Implementing precision agriculture in
the 21st century. Journal of Agricultural Engineering
Research, 76(3):267–275.
Xie, J. (2012). Research on key technologies base unity3d
game engine. In 2012 7th International Conference
on Computer Science Education (ICCSE), pages 695–
699.
Yang, C., Lee, T., Huang, C., and Hsu, K. (2016). Unity 3d
production and environmental perception vehicle sim-
ulation platform. In 2016 International Conference
on Advanced Materials for Science and Engineering
(ICAMSE), pages 452–455.
Zhao, J., Frumkin, N., Ishwar, P., and Konrad, J. (2019).
Cnn-based indoor occupant localization via active
scene illumination. In 2019 IEEE International Con-
ference on Image Processing (ICIP), pages 2636–
2640.
SIMULTECH 2020 - 10th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
90
