
Improving Activity Mining in a Smart Home using Uncertain and
Temporal Databases
Josky A
¨
ızan
1,2
, Cina Motamed
2
and Eugene C. Ezin
1
1
Institut de Math
´
ematiques et de Sciences Physiques, Universit
´
e d’Abomey-Calavi, Benin
2
Laboratoire d’Informatique Signal et Image de la C
ˆ
ote d’Opale, Universit
´
e du Littoral C
ˆ
ote d’Opale, France
Keywords:
Sequential Pattern Mining, Smart Home, Activity of Daily Living.
Abstract:
In the context of smart home, activity mining appears as an interesting and promising solution for learning ac-
tivity of daily living. This paper is an extension of a previous a research work titled Activity Mining in a Smart
Home from Sequential and Temporal Databases. It proposes an activity mining method based on uncertain and
temporal sequential pattern mining to deal with data uncertainty and events temporal relationships. It allows
to track regular activities and to detect changes in an individual’s behavioural pattern. Uncertain sequential
pattern mining algorithm is firstly applied to the input sequence database to extract typical sequences and sec-
ondly a clustering approach based on sequence alignment methods is performed in order to obtain separated
typical activities. The results obtained are enough good compared to existing related works.
1 INTRODUCTION
Home assistance is an emerging area that aims to
ensure health care, safety and autonomy for the el-
derly. A smart home capability appears as a promis-
ing solution. It is the combination of technologies and
services through the networking process for a better
quality of life.
Because of the large amount and uncertainty of
data that can be generated through daily activities of
inhabitant, in this paper, we have extended our previ-
ous work (A
¨
ızan et al., 2020) by using sequential pat-
tern mining technique based on probabilistic and tem-
poral databases to discover frequent activities mod-
els. Proposed method is consisted of three steps. In
the first step, the pre-processing phase converts sen-
sor data into the event sequences. In the second step,
the detection of frequent activities is performed by ap-
plying uncertain sequential pattern mining algorithm.
In the third step, the system estimates temporal con-
straints between events inside of each set of frequent
sequences and tries to cluster temporally similar se-
quence to obtain more specific sequences. It permits,
for example, to differentiate a short and a long activity
based on the same sequence.
The paper is organized as follows. In section 2,
related works are reviewed. Section 3 gives a theoret-
ical description of the proposed method while section
4 presents experimental results and analysis. A
conclusion ends this paper with its future directions.
2 STATE OF ART AND RELATED
WORKS
Learning daily activities in a smart home is a research
real challenge in the field of Sequential Pattern Min-
ing (SPM).
A frequent sequential pattern mining algorithm is
proposed in (Schweizer et al., 2015) to learn con-
sumer behaviour and then reduce energy consumption
in smart homes. This algorithm uses a window with a
prefixed size over the chronologically ordered events
to find all possible frequent patterns and is named
Window Sliding with De-Duplication (WSDD). This
approach does not consider the time between two
events. (Singh and Yassine, 2017) proposed in the
same field of energy consumption behaviour analysis,
an unsupervised progressive incremental data mining
mechanism.
Frequent episode mining is used in (Li et al.,
2017) to recognize sequential behaviour patterns. To
discover data model for smart home and IoT data an-
alytics, (Suryadevara, 2017) developed a framework.
A novel sequential pattern mining algorithm called
PBuilder is proposed in (Hassani et al., 2015) that
Aïzan, J., Motamed, C. and Ezin, E.
Improving Activity Mining in a Smart Home using Uncertain and Temporal Databases.
DOI: 10.5220/0009827206370642
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 637-642
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All r ights reserved
637
uses a batch-free approach to mine activities in a
smart home. High utility pattern mining is given in
(Menaka and Gayathri, 2013) to model activity in a
smart home and uses linked sensor data stream ap-
proach to save processing time and memory space.
Temporal data mining algorithm is presented in
(Moutacalli et al., 2012) to model activities. Their
approach uses the mining process of the timestamp
of each activity event constituting. A novel method
used sequential pattern mining based on the longest
common subsequence is proposed in (Raeiszadeh and
Tahayori, 2018) to model behaviour in smart home.
All proposed approaches and algorithms in the
context of smart home are applied over deterministic
database. Therefore they did not consider the uncer-
tainty of real world data. In practice, sensors data are
not always reliable and it seems important to consider
these imperfections.
Several works are carried out on sequential pattern
mining algorithms by integrating uncertainty manage-
ment. (Muzammal and Raman, 2010) proposed prob-
abilistic models for uncertain sequential pattern min-
ing. (Zhao et al., 2014) have developed algorithm to
mine probabilistically frequent sequential patterns in
large uncertain databases. (Li et al., 2013) focused on
probabilistic frequent spatio-temporal sequential pat-
tern with gap constraints. (Zhang et al., 2017) pro-
posed high utility-probability sequential pattern min-
ing from uncertain databases. (Muzammal et al.,
2017) developed a framework for probabilistic trajec-
tory extraction and mining from uncertain data. In
(Yang et al., 2002) sequential pattern mining is stud-
ied in noisy sequences. Sequential pattern mining in
probabilistic databases (Aggarwal, 2009), (Suciu and
Dalvi, 2005) is the popular framework for modelling
uncertainty.
In our approach, we considered uncertainty of the
sensor events and also, the order of the sensors’ ac-
tivation, for the frequent sequential pattern extrac-
tion for each activity. Since some activities share
some sensor events, in order to solve the conflicts in
the classification of activities, we used the sequence
alignment-based technique, which basically increases
the average accuracy of classification over the previ-
ous works.
3 PROPOSED METHOD
In this work, we use uncertain and temporal se-
quential pattern mining to discover typical activi-
ties that frequently occur by an individual in smart
home and the sequence alignment-based technique to
recognize and predict these activities as they occur.
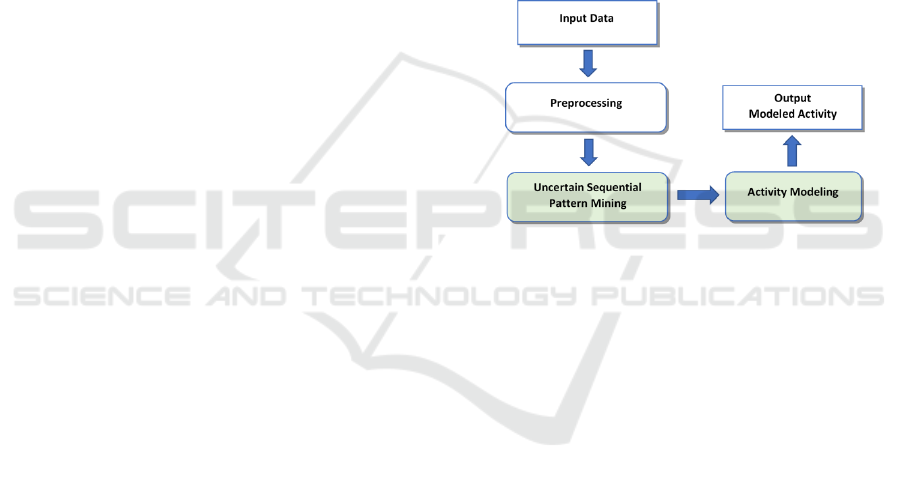
The proposed method has three phases namely pre-
processing, uncertain sequential pattern mining and
activity modeling. Fig. 1 presents the proposed ap-
proach architecture wich differs from that used in our
previous work (A
¨
ızan et al., 2020) by the integration
of uncertainty management in the sequetial pattern
mining phase and the use of sequence alignment in the
activity modeling phase. For our experience, we have
used the Massachusetts Institute of Technology (MIT)
smart home data set (Tapia et al., 2004). This data
set needs to be transformed to a realistic probabilistic
and temporal sequential database. The pre-processing
represents the first stage of the architecture. The sec-
ond step extracts typical activities by using a sequen-
tial pattern mining approach, and then a third stage
operates activity modeling based on sequence align-
ment.
Figure 1: Architecture of proposed approach.
3.1 Pre-processing
This stage is the same as that proposed in our previ-
ous work (A
¨
ızan et al., 2020). An activity is a time
ordered records of events. Events are generated by
sensors and actuators. The decision about activating
of an event is linked with the state changes (Boolean)
from the sensor or when its value greatly changes nu-
merically. A small change in value is considered as
the noise and is therefore ignored. In the real world,
each sensor is associated with a confidence c with
0 < c < 1. The pre-processing phase aims to con-
vert sensor data into probabilistic event sequences.
For illustration we show the “Washing dishes” activ-
ity from the dataset in Table 1. In the pre-processing
phase as shown in Fig. 2, raw sensor data are con-
verted to (t)eid format in which t represents sensor
activation or deactivation timestamp, eid represents
event id. The event id named eid is in the form XY Z
where X represents sensor id, Y represents sensor
state which can be 1 for activating or 0 for deacti-
vating. Z represents the number of times the sensor is
activated or deactivated during the same activity.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
638
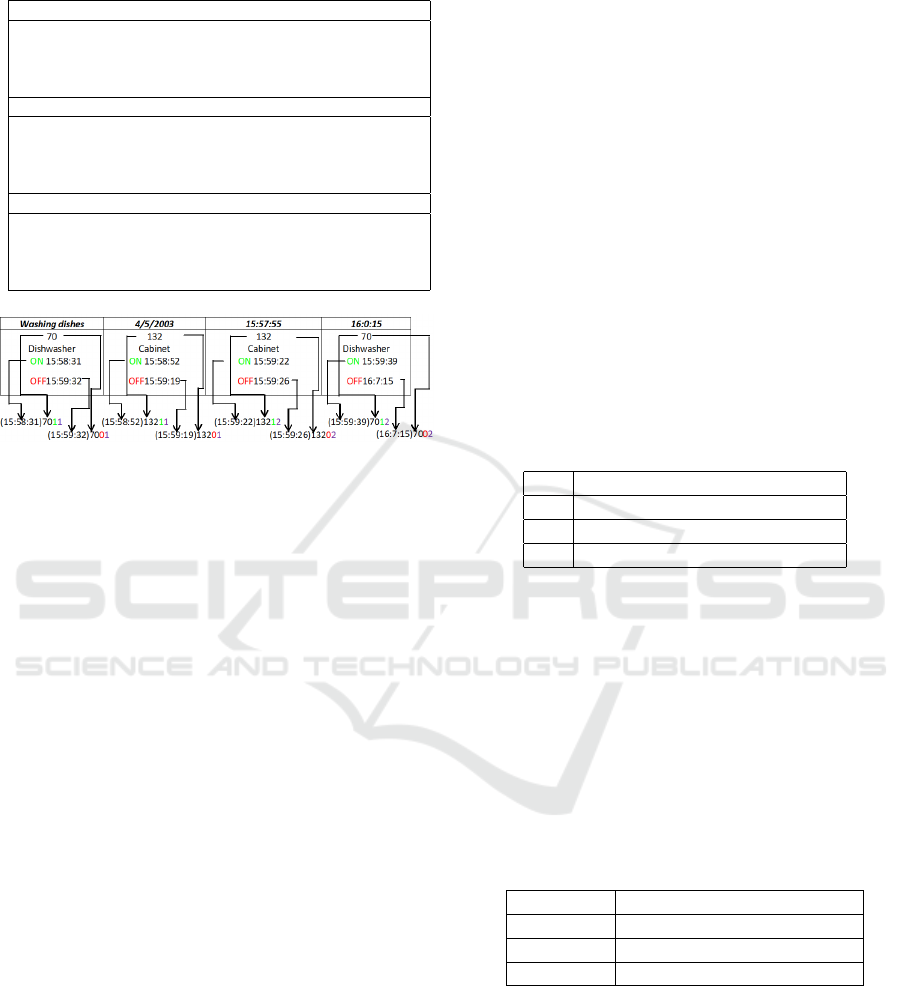
Table 1: Sample of data.
Going out to work 4/1/2003 12:11:26 12:15:12
81 139 140
Closet Jewelry box Door
12:12:29 12:13:27 12:13:45
12:13:0 12:13:35 12:13:48
Toileting 4/4/2003 12:30:17 12:31:10
100 67
Toilet Flush Cabinet
12:30:30 12:30:51
14:2:12 12:30:54
Washing dishes 4/5/2003 15:57:55 16:0:15
70 132 132 70
Dishwasher Cabinet Cabinet Dishwasher
15:58:31 15:58:52 15:59:22 15:59:39
15:59:32 15:59:19 15:59:26 16:7:15
Figure 2: Pre-Processing phase of the sensor data.
3.2 Sequential Pattern Mining
The second stage is performed by a sequential pat-
tern mining to obtain frequent sequences. According
to the sequence database, we have a deterministic se-
quential pattern mining when there is no uncertainty
in the data otherwise we must use an uncertain se-
quential pattern mining.
Deterministic Sequential Pattern Mining. rep-
resents the standard sequential pattern mining. Let
S = {1, ··· , p} and I = {i
1
, i
2
, · ·· , i
m
} be respectively
a set of sources and a set of items. An event e is a col-
lection of items such that e ⊆ I . A sequence database
D = hs
1
, s
2
, · ·· , s
p
i is an ordered list of sequences
such that each s
i
∈ D is of the form (eid
i
, e
i
, σ
i
),
where eid
i
is a unique event-id, including a timestamp
(events are ordered by this timestamp), e
i
is an event
and σ
i
is a source.
A sequence is an ordered list of events s =
he
1
, e
2
, · ·· , e
n
i such that e
k
⊆ I (1 ≤ k ≤ n). A se-
quence s
a
= hA
1
, A
2
, · ·· , A
n
i is a subsequence of an-
other sequence s
b
= hB
1
, B
2
, · ·· , B
m
i denoted s
a
s
b
,
if and only if there exist integers 1 ≤ i
1
< i
2
< · ·· <
i
n
≤ m such that A
1
⊆ B
i
1
, A
2
⊆ B
i
2
, · ·· , A
n
⊆ B
i
n
. Let
d
i
be the sequence corresponding to a source i. For
a sequence s and source i, let X
i
(s, d
i
) be an indica-
tor variable, whose value is 1 if s is a subsequence of
sequence d
i
, and 0 otherwise. For any sequence s, its
support in D is denoted by:
Sup(s, D) =
p
∑
i=1
X
i
(s, d
i
) (1)
The goal is to find all sequences s such that
Sup(s, D) ≥ θp for some user-defined threshold 0 ≤
θ ≤ 1.
Uncertain Sequential Pattern Mining. In the
context of Uncertain sequential pattern mining, there
are three different kinds of uncertainty: the source, the
event and the time (Muzammal and Raman, 2010). In
our work, we will focus on sensors data uncertainty,
which is linked with the event uncertainty.
In the event uncertainty, the database D
p
=
(D
p
1
, D
p
2
, · ·· D
p
m
) is represented by a collection of p-
sequence. Each p-sequence is an ordered list of
events with its confidence. An example of p-sequence
database is presented in Table 2.
Table 2: Sample of p-sequence database.
p-sequence
D
p
X
(e, h : 0.6)(e, f : 0.3)( f , g : 0.7)
D
p
Y
(e, h : 0.4)(e, f : 0.2)
D
p
Z
(e : 1.0)(e, f : 0.5)( f , g : 0.3)
The Possible Worlds semantics of D
p
is as fol-
lows. For each event e
j
in a p-sequence D
p
i
there
are two kinds of worlds; one in which e
j
occurs and
the other where it does not. For the rest of the algo-
rithm, we use Possible Worlds semantics PW (D
p
) of
the database D
p
. we get PW (D
p
) by calculating the
PW (D
p
i
). each PW (D
p
i
) is obtained by considering of
the 2
l
possibilities with l the length of p-sequence D
p
i
.
In this approach, the events at the p-sequences
level are considered probabilistically independent,
Table 3 presents PW (D
p
Y
).
Table 3: Possible worlds of D
p
Y
.
hi (1 − 0.4) × (1 − 0.2) = 0.48
(e, h) (0.4) × (1 − 0.2) = 0.32
(e, f ) (1 − 0.4) × (0.2) = 0.12
(e, h)(e, f ) (0.4) × (0.2) = 0.08
The same method is used to determine PW (D
p
X
)
and PW (D
p
Z
) and Table 4 presents the possible worlds
PW (D
p
) of the p-sequence database D
p
.
An example of the possible world D
∗
is shown in
Table 5.
A probability of this possible world Pr(D
∗
) =
0.294 × 0.32 × 0.35 = 0.03 if we consider that p-
sequence stochastically independent. Expected Sup-
port is evaluated according (2).
Improving Activity Mining in a Smart Home using Uncertain and Temporal Databases
639
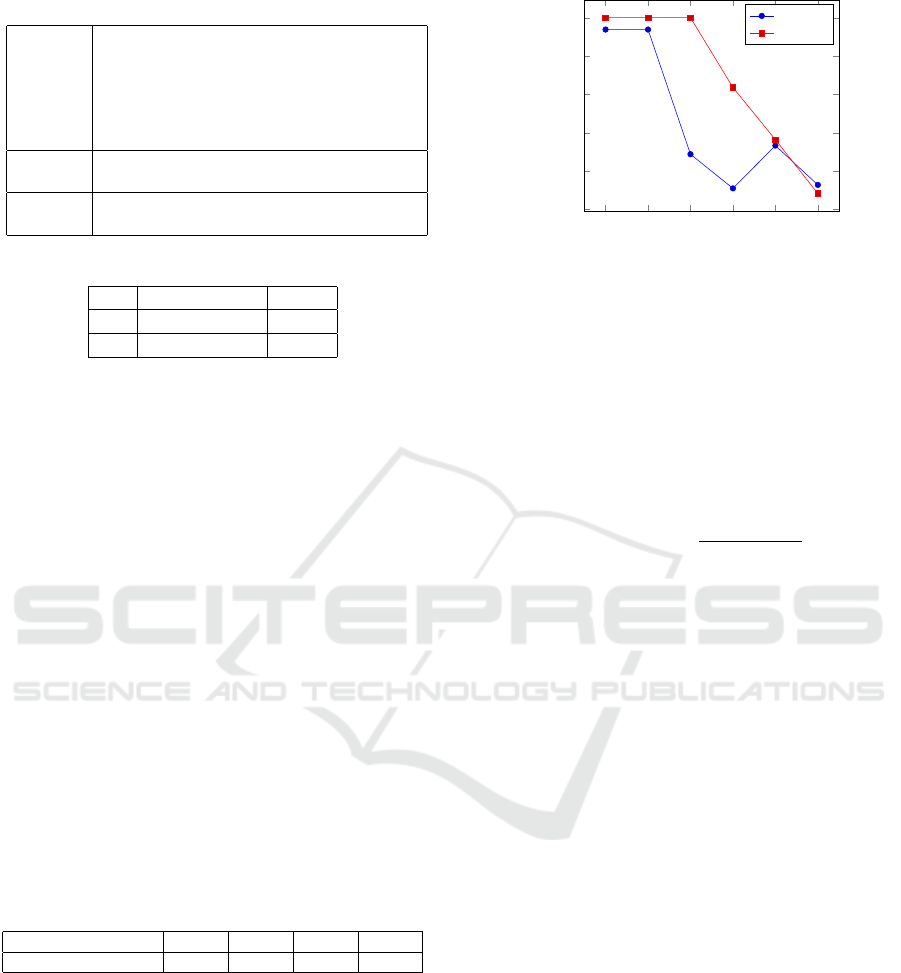
Table 4: Possible worlds of D
p
.
PW (D
p
X
) {hi = 0.084};{(e, h) = 0.126};
{(e, f ) = 0.036}; {( f , g) = 0.196};
{(e, h)(e, f ) = 0.054};
{(e, h)( f , g) = 0.294};
{(e, f )( f , g) = 0.084};
{(e, h)(e, f )( f , g) = 0.126}
PW (D
p
Y
) {hi = 0.48}; {(e, h) = 0.32};
{(e, f ) = 0.12}; {(e, h)(e, f ) = 0.08}
PW (D
p
Z
) {(e) = 0.35};{(e)(e, f ) = 0.35};
{(e)( f , g) = 0.15}; {(e)(e, f )( f , g) = 0.15}
Table 5: One possible world.
D
∗
X
{(e, h)( f , g)} 0.294
D
∗
Y
{(e, h)} 0.32
D
∗
Z
{(e)(e, f )} 0.35
ES(s, D
p
) =
∑
D
∗
∈PW (D
p
)
Pr[D
∗
] × Sup(s, D
∗
) (2)
Sup(s, D
∗
) is evaluated according the (1) be-
cause D
∗
is deterministic. We have |PW (D
p
X
)| ×
|PW (D
p
Y
)| × |PW (D
p
Z
)| = 8 × 4 × 4 = 128 and
then Equation (2) becomes unexploitable when the
database is large. To deal with problem, expected
support is evaluated as follows: Let s = (e)( f ) be a
sequence and database of Table 2. For each source
X, Y and Z, the probability that it supports s is calcu-
lated. According to PW (D
p
X
see Table 4, the probabil-
ity that source X support s is (0.054+0.294+0.084+
0.126) = 0.558 and the probability that it does not is
1 − 0.558 = 0.442. similarly, the probability that Y
and Z support s are 0.08 and 0.65. For i = 0, 1, 2, 3,
independence of p-sequence is used to compute the
probability that exactly i sources support s as shown
in Table 6. For example, the probability that s is sup-
ported by all three sources is (0.558 × 0.08 × 0.65) =
0.029. Then ES(s) = (0 × 0.142 + ···3 × 0.029) =
1.228.
Table 6: Support probability distribution.
No of sources 0 1 2 3
support probability 0.142 0.456 0.372 0.029
3.3 Activity Modeling
At this stage, each input sequence (test sequences) is
compared against frequent sequences patterns of all
of the activites from uncertain sequential pattern min-
ing stage. A score will be computed for each pair
of sequence and activity class. This score determines
how similar the triggered sensors of input sequence
are with the triggered sensors of discovered frequent
sequences patterns for each activity. The class of ac-
50 60
70 80 90 100
90
92
94
96
98
100
Confidence
Accuracy
subject 1
subject 2
Figure 3: Activities recognition accuray according to sensor
confidence.
tivity with maximum score will be selected for that
sequence.
To define a similarity measure between the two
sequences (3), we used Levenshtein distance e(A, B)
(Rashidi et al., 2011), which is the number of edits
(insertions, deletions, and substitutions) required to
transform an event sequence A into another event se-
quence B.
sim(A, B) = 1 −
e(A, B)
max(|A|, |B|)
(3)
4 EXPERIMENTAL RESULTS
AND ANALYSIS
In this section, we present the results obtained with
the proposed method. We used the MIT data smart
home testbed better described in subsection 4.1.
4.1 MIT Dataset
MIT dataset is a two weeks collection of human ac-
tivity in two single-person apartments containing re-
spectively 77 and 84 sensors see Fig. 5 for illustra-
tion. The sensors were installed in everyday objects
such as containers, drawers, refrigerators, etc. to
record opening-closing events (activation deactivation
events) as the subject carried out everyday activities.
Activities are labeled in to 16 different classes and
the number of occurrences of each class by subject is
showed in Table 7.
4.2 Results and Analysis
Our implementation in Java, is executed on a machine
Intel(R) Core(TM) i7 −7500U CPU @2.70 GHz 2.90
GHz running on Windows 10. With a support value
fixed to 0.5, our method applied on MIT dataset (see
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
640
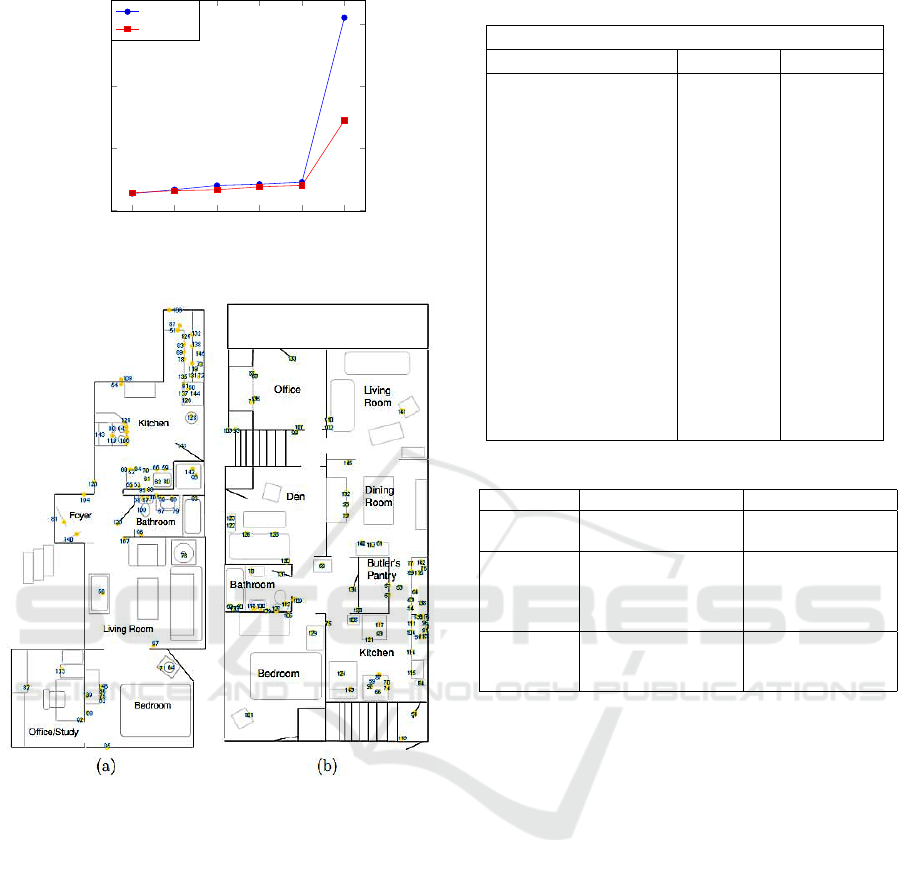
50 60
70 80 90 100
0
5
10
15
Confidence
Process time
subject 1
subject 2
Figure 4: Processing time according to sensor confidence.
Figure 5: (a) apartment of subject one. (b) apartment of
subject two.
Fig. 3) shows that accuracy rate is maximum for con-
fidences between 50% and 70% and decreases for
confidence greater than 70%. The maximum values of
accuracy are 99.38% and 100% respectively for sub-
ject 1 and subject 2.
In summary, the decrease of accuracy rate for con-
fidences greater than 70% is explained by an increase
in the part of unreliable frequent pattern resulting
from uncertain sequential pattern mining phase by ap-
plying these confidences.
Fig. 4 depicted processing time for MIT dataset.
We can notice that the processing time increases for
confidences greater than 70% and are low for confi-
dences that give maximum values of accuracy rate.
This is explained by the fact that when applying these
confidences that give maximum values of accuracy
rate at the uncertain sequential pattern mining phase,
Table 7: Activities labeled.
Number of Examples per Class
Activity Subject 1 Subject 2
Preparing dinner 8 14
Preparing lunch 17 20
Listening to music - 18
Taking medication - 14
Toileting medication 85 40
Preparing breakfast 14 18
Washing dishes 7 21
Preparing a snack 14 16
Watching TV - 15
Bathing 18 -
Going out to work 12 -
Dressing 24 -
Grooming 37 -
Preparing a beverage 15 -
Doing laundry 19 -
Cleaning 8 -
Table 8: Comparison of results with MIT dataset.
Approach Result
Proposed
Method
(Uncertain SPM) Subject 1: 99.38%
Subject 2: 100%
(Raeiszadeh
and
Tahayori,
2018)
(UP-
DM+RandomForest)
Subject 1: 97.45%
Subject 2: 91.37%
(Tapia
et al.,
2004)
(Naive Bayes Clas-
sifier)
Subject 1: 60.6%
Subject 2: 41.09%
we obtain only useful and reliable frequent pattern.
Other confidences give not only useful and reliable
frequent pattern but also unreliable frequent pattern
and then need more processing time. Table 8 shows a
comparison of our results with other methods.
5 CONCLUSION
We have used a sequential pattern mining algorithm
from probabilistic and temporal databases to bring out
typical activities in the smart home. By considering
of sensor uncertainty, the recognition focuses on re-
liable parts of the sensor data. We use temporal re-
lationships between events for a more accurate char-
acterization/classification of frequent activities. The
future work is the development of an online adaptive
unsupervised learning of activities in the context of
uncertain observation and temporal constraints.
Improving Activity Mining in a Smart Home using Uncertain and Temporal Databases
641

REFERENCES
Aggarwal, C. C. (2009). Managing and mining uncertain
data.
A
¨
ızan, J., Motamed, C., and Ezin, E. (2020). Activity min-
ing in a smart home from sequential and temporal
databases. In In Proceedings of the 9th International
Conference on Pattern Recognition Applications and
Methods.
Hassani, M., Beecks, C., ows, D. T., and Seidl, T. (2015).
Mining sequential patterns of event streams in a smart
home application. In The LWA 2015 Workshops:
KDML, FGWM, IR, and FGD.
Li, L., Li, X., Lu, Z., Lloret, J., and Song, H. (2017).
Sequential behavior pattern discovery with frequent
episode mining and wireless sensor network. In Com-
munications Magazine. IEEE.
Li, Y., Bailey, J., Kulik, L., and Pei, J. (2013). Mining
probabilistic frequent spatio-temporal sequential pat-
terns with gap constraints from uncertain databases.
In IEEE International Conference on Data Mining
(ICDM). IEEE.
Menaka, J. and Gayathri, K. S. (2013). Activity modeling
in smart home using high utility pattern mining over
data streams. In The Journal of Computer Science and
Network.
Moutacalli, M. T., Bouzouane, A., and Bouchard, B.
(2012). Unsupervised activity recognition using tem-
poral data mining. In The First International Confer-
ence on Smart Systems, Devices and Technologies.
Muzammal, M., Gohar, M., Rahman, A. U., and Qu, Q.
(2017). Trajectory mining using uncertain sensor data.
In The Journal of IEEE Access. IEEE.
Muzammal, M. and Raman, R. (2010). On probabilistic
models for uncertain sequential pattern mining. In In-
ternational Conference on Advanced Data Mining and
Applications.
Raeiszadeh, M. and Tahayori, H. (2018). A novel method
for detecting and predicting resident’s behavior in
smart home. In 6th Iranian Joint Congress on Fuzzy
and Intelligent Systems. IEEE.
Rashidi, P., Cook, D. J., Holder, L. B., and Schmitter-
Edgecombe, M. (2011). Discovering activities to rec-
ognize and track in a smart environment. In IEEE
Trans Knowl Data Eng, volume 23(4), page 527–539.
Schweizer, D., Zehnder, M., Wache, H., and Witschel, H.
(2015). Using consumer behavior data to reduce en-
ergy consumption in smart homes. In 14th Interna-
tional Conference on Machine Learning and Applica-
tions.
Singh, S. and Yassine, A. (2017). Mining energy consump-
tion behavior patterns for house holds in smart grid.
In Transactions on Emerging Topics in Computing.
IEEE.
Suciu, D. and Dalvi, N. N. (2005). Foundations of prob-
abilistic answers to queries. In the ACM SIGMOD
International Conference on Management of Data.
Suryadevara, N. (2017). Wireless sensor sequence data
model for smart home and iot data analytics. In
First International Conferenceon Computational In-
telligence and Informatics, Advances in Intelligent
Systems and Computing.
Tapia, E. M., Intille, S. S., and Larson, K. (2004). Activ-
ity recognition in the home setting using simple and
ubiquitous sensors. In Pervasive Computing.
Yang, J., Wang, W., Yu, P. S., and Han, J. (2002). Mining
long sequential patterns in a noisy environment. In
ACM SIGMOD international conference on Manage-
ment of data.
Zhang, B., Lin, J. C., Fournier-Viger, P., and Li, T. (2017).
Mining of high utility-probability sequential patterns
from uncertain databases. In The Journal of PLoS
One.
Zhao, Z., Yan, D., and Ng, W. (2014). Mining probabilis-
tically frequent sequential patterns in large uncertain
databases. In The Journal of IEEE Transactions on
Knowledge and Data Engineering. IEEE.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
642
