
Proactive-cooperative Navigation in Human-like Environment for
Autonomous Robots
Wanting Jin
a
, Paolo Salaris
b
and Philippe Martinet
c
Chorale Team, INRIA Sophia Antipolis, Valbonne, France
Keywords:
Human-robot Interaction, Proactive Planning, Cooperative Behavior, Social Force Model.
Abstract:
This work
1
deals with the problem of navigating a robot in a constrained human-like environment. We provide
a method to generate a control strategy that enables the robot to proactively move in order to induce desired
and socially acceptable cooperative behaviors in neighboring pedestrians. Contrary to other control strategies
that simply aim to passively avoid neighboring pedestrians, this approach aims to simplify the navigation task
of a robot by looking for cooperation with humans, especially in crowded and constrained environments. The
co-navigation process between humans and a robot is formalized as a multi-objective optimization problem
and a control strategy is obtained through the Model Predictive Control (MPC) approach. The Extended
Headed Social Force Model with Collision Prediction (EHSFM with CP) is used to predict the human motion.
Different social behaviors of humans when moving in a group are also taken into account. A switching strategy
between purely reactive and proactive-cooperative planning depending on the evaluation of human intentions
is also furnished. Validation of the proactive-cooperative planner enables the robot to generate more socially
and understandable behaviors is done with different navigation scenarios.
1 INTRODUCTION
In order to enable the robot to establish a cooperative
behavior with humans in a constrained environment,
the robot not only should be able to plan its motion in
the presence of humans but also to predict human ac-
tions. The problem has two main parts: Human Aware
Navigation and Human Motion Prediction.
Human Aware Navigation. Reactive planning treats
pedestrians as static or moving obstacles in the envi-
ronment (Bevilacqua et al., 2018). However, proac-
tive planning extends reactive planning by taking into
account that humans can see the robot and react ac-
cordingly. In (Ferrer and Sanfeliu, 2019) authors pro-
pose an Anticipative Kino-dynamic Planner, where
the reaction of the human towards robot motion has
been taken into account. In (Truong and Ngo, 2017),
the robot motion is planned by using the Hybrid Re-
ciprocal Velocity Obstacle (Snape et al., 2011), which
is known as a proactive velocity-based approach.
a
https://orcid.org/0000-0002-3399-0499
b
https://orcid.org/0000-0003-1313-5898
c
https://orcid.org/0000-0001-5827-0431
1
This work is funded by MOBI-DEEP project
(ANR-17-CE33-0011) and CROWDBOT project (H2020
n.779942).
However, in previous works, human motion is only
a passive reaction to the robot one. It is worth not-
ing that besides passively move to avoid the collision,
humans are also able to understand others’ navigation
intentions and actively move to give convenience to
others. In (Che et al., 2020), the robot expresses its
navigation desire through explicit and implicit com-
munication. In (Khambhaita and Alami, 2020), both
human and robot trajectories are optimized during the
cooperation process.
Human Motion Prediction. The microscopic human
motion model can be roughly classified as physics-
based, planning-based and learning-based. For the
planning-based methods, humans behave like plan-
ners by finding an optimal path during navigation
(Mombaur et al., 2010). In (Trautman et al., 2013),
human motion is modeled as an Interacting Gaussian
Process. However, such methods require a lot of data
for training and do not generalize to different envi-
ronments. Among the physics-based models, the So-
cial Force Model (SFM) is the most used one (Hel-
bing and Moln
´
ar, 1995) which is a simple and uni-
versal method that could provide valid motion pre-
dictions by taking into account the interactions with
the environment. In the case of cooperation, human
behaviors are not only based on the information per-
412
Jin, W., Salaris, P. and Martinet, P.
Proactive-cooperative Navigation in Human-like Environment for Autonomous Robots.
DOI: 10.5220/0009822004120419
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 412-419
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ceived from surrounding but also depend on their in-
tentions. In (Tamura et al., 2012), the sub-goals are
set based on human intentions. In (Zanlungo et al.,
2011), the authors improve the initial SFM by adding
the explicit collision prediction (CP). In this paper,
we choose a suitable cost function and define a con-
strained optimization framework to generate both re-
active and proactive-cooperative motions for a mo-
bile robot in human-like environments. We extend
the SFM framework and show by simulations that it
is able to give reasonable and useful predictions of
human motions, even during the cooperative phase.
We also provide a switching strategy between reactive
and proactive-cooperative planning depending on the
human availability to collaborate. Finally, we test the
performances of the proposed machinery under differ-
ent and significant human-robot interaction scenarios,
especially where the cooperation and the communi-
cation of intentions are important (Khambhaita and
Alami, 2017).
2 NAVIGATION STRATEGY
In this section, our proactive-cooperative planning is
described and the switching strategy for passing from
purely reactive strategy to a proactive one is provided.
2.1 Multi-objective Optimization
For simplicity reasons, both humans and robots are
modeled as cylinders with radius r
r
and r
i
, respec-
tively. The configuration of the vehicle is described
by q
q
q
r
(t) = (p
p
p
r
(t),θ
r
(t)), where p
p
p
r
(t) = (x
r
(t),y
r
(t))
T
is the position of the vehicle, and θ
r
(t) is the vehi-
cle heading angle. The input of the vehicle is de-
noted by u
u
u
r
= [v
r
(t),ω
r
(t)]
T
with v
r
(t) and ω
r
(t) the
forward and angular velocity respectively. We also
define v
v
v
r
=
˙
p
p
p
r
as the robot linear velocity. In this
paper, we use a kinematic and nonholonomic model
for our robot but any other model can be used. Let
us also consider humans moving on the same plane
around the robot and represent the state of the i-th per-
son as q
q
q
i
(t) = (p
p
p
i
(t),θ
i
(t),v
f
i
(t),v
o
i
(t),ω
i
(t)), where
p
p
p
i
(t) = (x
i
(t),y
i
(t))
T
and θ
i
(t) are defined similar as
the configuration of robot. And ω
i
is the angular ve-
locity. We will assume the following dynamic model
for each person in the environment:
˙x
i
= v
f
i
cosθ
i
− v
o
i
sinθ
i
; ˙y
i
= v
f
i
sinθ
i
+ v
o
i
cosθ
i
˙
θ
i
(t) = ω
i
; ˙v
f
i
(t) =
1
m
i
u
f
i
; ˙v
o
i
(t) =
1
m
i
u
o
i
;
˙
ω
i
(t) =
1
I
i
u
θ
i
(1)
where u
u
u
i
= [u
f
i
,u
o
i
,u
θ
i
]
T
are the inputs used to generate
the predicted trajectory. The mass and the inertia of
the i-th person are defined as m
i
and I
i
. We define
v
v
v
i
=
˙
p
p
p
i
as the human linear velocity expressed on the
plan of motion.
The motion planning problem can be hence for-
malized as a constrained multi-objective optimization
problem (see Sec. 4) that smoothly adapts to different
social scenarios by changing the weights of the linear
scalarization applied to the cost function. As a con-
sequence, in a generic form, the constrained multi-
objective optimization problem can be formalized as
u
u
u
∗
r
=argmin
u
u
u
r
Z
¯
t+T
¯
t
∑
µ
γ
µ
F
µ
(u
u
u
r
(τ),q
q
q
r
(τ),q
q
q
1
(τ),...,q
q
q
N
(τ)) dτ
s.t. g
g
g(u
u
u
r
(t),q
q
q
r
(t),.. . , q
q
q
N
(t)) ≤ 0
(2)
where
¯
t is the current time, T is the whole horizon
time, N is the total number of pedestrians in the neigh-
boring, γ
µ
are the weights to be adapted depending
on the current scenario, F
µ
(·) are the cost functions
(see Sec. 4.1), g
g
g(·) are the several constraints (see
Sec. 4.2). As it will be clear in Sec. 4, the optimiza-
tion problem (2) will be solved by adopting the Model
Predictive Control (MPC).
2.2 Proactive-cooperative Planning
A reactive action consists in a local path correspond-
ing to an instantaneous reaction to sensory feedback.
An action can be defined instead as proactive if it
has the ability of creating or controlling a situa-
tion rather than just responding to it after it hap-
pened. To be proactive a robot has to act with the aim
of creating or controlling a situation that, e.g., may
facilitate a subsequent phase of cooperation and/or
the robot (human) objective. Differently from reac-
tive planning, proactive one must take into account
if the human is willing to cooperate or not by ob-
serving how he/she reacts. In the starting stage of
the proactive-cooperative planning, the robot should
proactively generate actions to express its willingness
to cooperate and intentions clearly. Once the hu-
man understands the robot’s objective and is willing
to cooperate, the cooperation phase starts (see Fig-
ure 1). The main difference between reactive and
proactive-cooperative planning is that, the latter up-
dates the predicted human trajectory simultaneously
with the planned robot trajectory. Hence, both human
and robot future trajectories are taken into account for
the optimization process (see the two-way arrows be-
tween the ”Human State Prediction” and ”Proactive-
Cooperative Planning” blocks in Figure 1).
Proactive-cooperative Navigation in Human-like Environment for Autonomous Robots
413
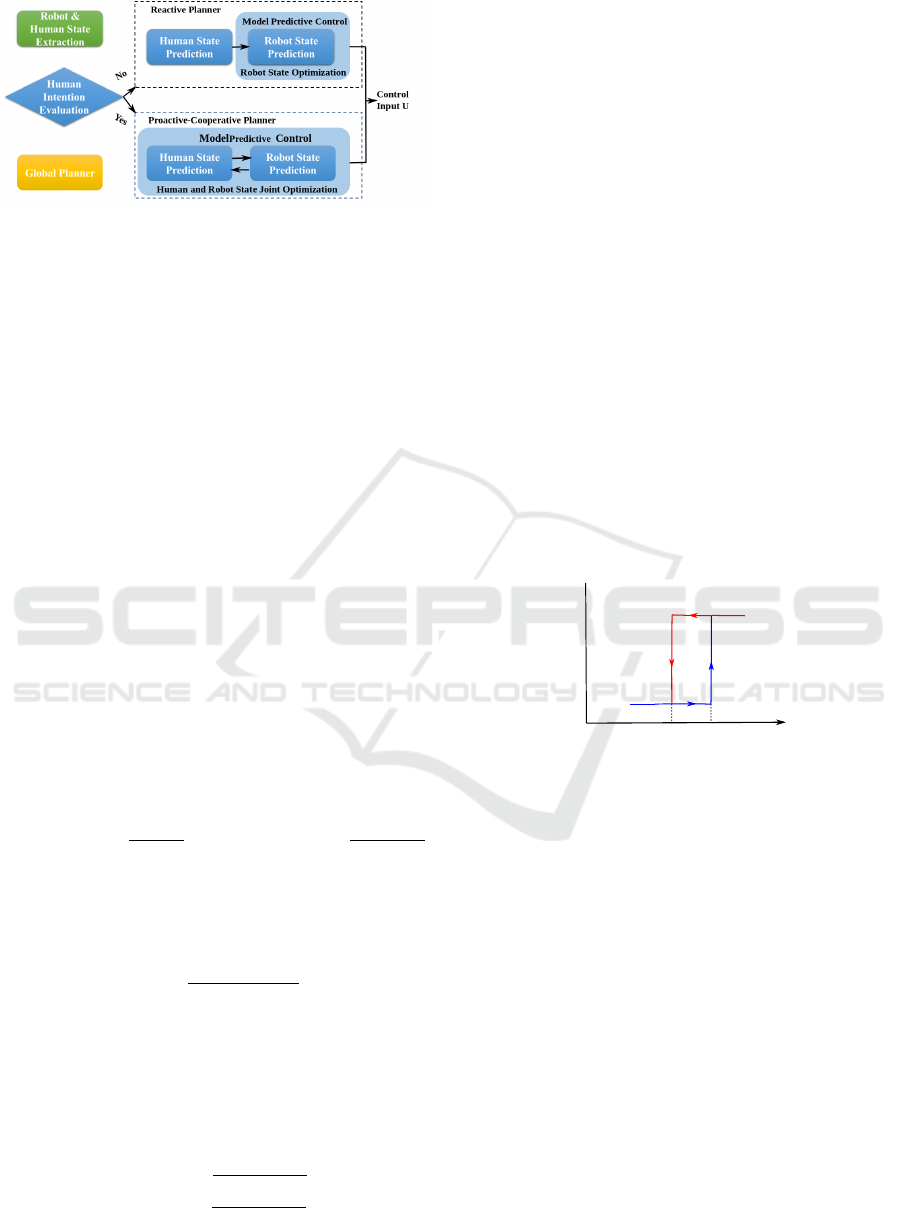
Figure 1: Local planning framework.
2.3 Switching Strategy
Based on previous analysis, it is clear that the
robot must be able to switch between reactive and
cooperative-proactive strategies depending on the re-
sult of the evaluation of human intentions. For sim-
plicity reasons, we consider only two possible human
intentions (denoted by int):
• iff int = 0: human does not see the robot or is not
willing to cooperate;
• iff int = 1: human sees the robot and is willing to
cooperate;
Let us introduce now the confidence of human inten-
tions Con
int
= g(ms), as a function of ms which can be
considered as the ”measurement” of human reaction
to robot movements. ms is defined as a binary func-
tion which depends on the difference between the ob-
servation of the real human trajectories
ˆ
q
q
q
real
i
and the
predicted one during cooperation q
q
q
coop
i
as:
• ms = 0: when
ˆ
q
q
q
real
i
− q
q
q
coop
i
> e
thres
• ms = 1: when
ˆ
q
q
q
real
i
− q
q
q
coop
i
< e
thres
where, e
thres
is a threshold parameter.
Odd(int) =
p(int=1)
p(int=0)
and Odd(int|ms) =
p(int=1|ms)
p(int=0|ms)
are defined as the ratio between the possibility of hav-
ing int = 1 and int = 0 before and after ms is updated.
Its form can be simplified through Bayes rule and ap-
ply log operator to both sides as
logOdd(int|ms) = log
p(ms|int = 1)
p(ms|int = 0)
+ logOdd(int)
(3)
We use the value of log Odd(int) to represents the
confidence of human intentions Con
−
int
before updat-
ing ms, and logOdd(int|ms) to represent the updated
confidence Con
+
int
after updating ms. Previous equa-
tion (3) becomes Con
+
int
= Con
−
int
+ lomeas, with:
lomeas =
(
lonot = log
p(ms=0|int=1)
p(ms=0|int=0)
∈ (−1,0)
losee = log
p(ms=1|int=1)
p(ms=1|int=0)
∈ (0,1)
(4)
where lomeas is a predefined value indicating how
the Con
int
should be updated depending on the ”mea-
surement” ms. During the interaction process be-
tween the human and the robot, the robot will have
a new ms at each time step, and Con
int
will be up-
dated continuously through the whole interaction pro-
cess. To avoid jerky motion during switching, hys-
teresis is introduced. When the robot and a per-
son meet, the robot is not sure about human inten-
tions. The robot needs to clearly show its cooperative
willingness and checks the human ones for cooper-
ation. The confidence Con
int
is initially set higher
than a given confidence threshold Con
thres−
, to en-
able the proactive-cooperative behavior. If the hu-
man responds to the robot motion accordingly then
ms is set to 1 and the confidence Con
int
keeps to in-
crease and rests bigger Con
thres−
: the cooperative pro-
cess finally starts. If the human does not respond to
robot suggestions or he/she decides to stop the coop-
eration then ms = 0, the confidence Con
int
decreases
and falls down Con
thres−
. The robot switches to reac-
tive planning to guarantee safety. During the reactive
planning, if the confidence Con
int
increases beyond
Con
thres+
, the robot switches again to the proactive-
cooperative planning (Figure 2).
Planning Strategy
Reactive
Planning
Proactive-
Cooperative
Planning
Con
int
Con
thres+
Con
thres-
Figure 2: Switching strategy.
3 HUMAN MOTION
The robot needs to predict the human motion under
different navigation scenarios. The Extended Headed
Social Force Model (EHSFM) with Collision Pre-
diction (CP) is proposed as a combination of three
state of the art works built upon the SFM frame-
work: The Headed Social Force Model (HSFM) (Fa-
rina et al., 2017), the Extended Social Force Model
(ESFM) (Ferrer and Sanfeliu, 2019) and the collision
prediction (CP) (Zanlungo et al., 2011).
3.1 Headed Social Force Model
The HSFM expands the SFM by taking into account
that pedestrians usually move along its heading direc-
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
414

tion. The control input u
u
u
i
is hence computed as
u
f
i
= f
f
f
T
i
e
e
e
f
i
u
o
i
= β
o
( f
f
f
e
i
)
T
e
e
e
o
i
− β
d
v
o
i
u
θ
i
= −β
θ
(θ
i
− θ
0
i
) − β
ω
ω
i
(5)
Definitions of the parameters are the same as in (Fa-
rina et al., 2017). The interaction force between
pedestrian i and agent z (z can be an obstacle o, a wall
w and other pedestrians j) is
f
f
f
iz
= A
z
e
(r
iz
−diz)/B
z
n
n
n
iz
(6)
where A
z
reflects the strength of interaction, B
z
corre-
sponds to the interaction range. r
iz
= r
i
+r
z
is the sum
of their radius. d
iz
= kp
p
p
i
− p
p
p
z
k denotes the distance
between their centers. n
n
n
iz
denotes the normalized co-
ordinates pointing from agent z to pedestrian i.
3.2 EHSFM with Collision Prediction
The EHSFM with CP extends the HSFM by including
the ESFM to take into account the influence of robot
motion on human one. The human ability of collision
prediction is also added. The behaviors of humans
when walking in a group are also introduced. Let u
u
u
i
the input as defined in 5. The definition of the social
force is extended by introducing the effect of human-
robot interactions, the range of view and the effects of
people walking as a group. The total social force f
f
f
i
is
f
f
f
i
i
i
= f
f
f
0
i
+ f
f
f
e
i
+ f
f
f
grp
i
. (7)
In real cases, a group of people can separate for
a while in order to avoid collision and then again
come back in formation depending on the relation-
ship between the members of the group (Bruneau
et al., 2015). In our work, group behavior is mod-
eled by considering a spring between a couple of peo-
ple. When the members get closer or separate be-
cause of external force generated by the environment,
the spring will push or bring them back to a comfort-
able distance. The group force and the stiffness of the
spring s
g
are defined as follows:
f
f
f
grp
i
= s
g
(d
grp
− l
grp
)n
n
n
ji
with s
g
=
κ
1+cos(∠v
v
v
i
,v
v
v
j
)
2l
grp
e
k
v
v
v
i
−v
v
v
j
k
if d
grp
< 2l
grp
0 otherwise
(8)
where d
grp
is the current distance between a couple
of members and l
grp
is the initial distance before the
interaction with the robot. Parameter κ represents
the relationship between two persons. Its value for
a group of mother and son should be higher than for
a group of friends. The stiffness of the spring should
reduce to model the intention of the member of sepa-
rating each other, thus it is also a function of the dif-
ference between two members’ heading direction and
the magnitude of the velocity. When d
grp
> 2l
grp
a
couple of people are not treated as a group anymore.
The updated external force f
e
i
is defined as:
f
f
f
e
i
=
∑
j(6=i)∈N
w
ψ
i j
f
f
f
CP
i j
+
∑
w∈W
w
ψ
iw
f
f
f
CP
iw
+
∑
o∈O
w
ψ
io
f
f
f
CP
io
+
∑
r∈R
w
ψ
ir
f
f
f
CP
ir
(9)
where N, O, R are the sets of pedestrians, obstacles
and robots in the environment. w
ψ
iz
takes into account
the anisotropy effect of the interaction force (Johans-
son et al., 2007) caused by the human’s limit field of
view and it is defined as:
w
ψ
iz
= (λ + (1 − λ)
1 + cos(ψ
iz
)
2
), cos(ψ
iz
) = e
e
e
f
i
· n
n
n
iz
(10)
where ψ
iz
is the angle between human forward direc-
tion e
e
e
f
i
and normalized distance vector n
n
n
iz
. λ ∈ [0, 1]
is a parameter which grows with the strength of inter-
actions from behind.
The interaction force generated by the robot f
CP
ir
is
added to model the effects of the robot motion on the
human one. The interaction force f
f
f
iz
defined in (6) is
not enough to model human intention during cooper-
ation since it models human motion as a pure reaction
to changes in the environment. In order to model the
cooperative behavior between humans and the robot,
the human’s ability of Collision Prediction (CP) to
solve potential collisions is taken into account. The
interaction force with CP f
CP
iz
(z can be obstacles o,
walls w, pedestrians j and robots r ) is
f
CP
iz
(
{
d
d
d
iz
}
,
{
v
v
v
iz
}
,v
v
v
i
) = A
0
z
v
i
t
i
e
−d
iz
/B
0
z
d
d
d
0
iz
(t
i
)
d
0
iz
(t
i
)
(11)
The parameters are defined similarly to (Zanlungo
et al., 2011). The comparison between f
iz
and f
CP
iz
is
showed in Figure 3. Under the scenario where agent
i and j meet face to face in a corridor, f
i j
is along
continuous lines which depend on the current relative
positions. This leads both agents to decelerate but
cannot generate significant lateral motion until they
are very close. f
CP
i j
is instead along the dashed lines
which depend on the future point of potential colli-
sion. This leads the two agents to move in the lateral
direction and gives the way to the others.
4 PROBLEM DEFINITION
The optimization problem is now formalized by using
the MPC which solves an optimal control problem for
Proactive-cooperative Navigation in Human-like Environment for Autonomous Robots
415
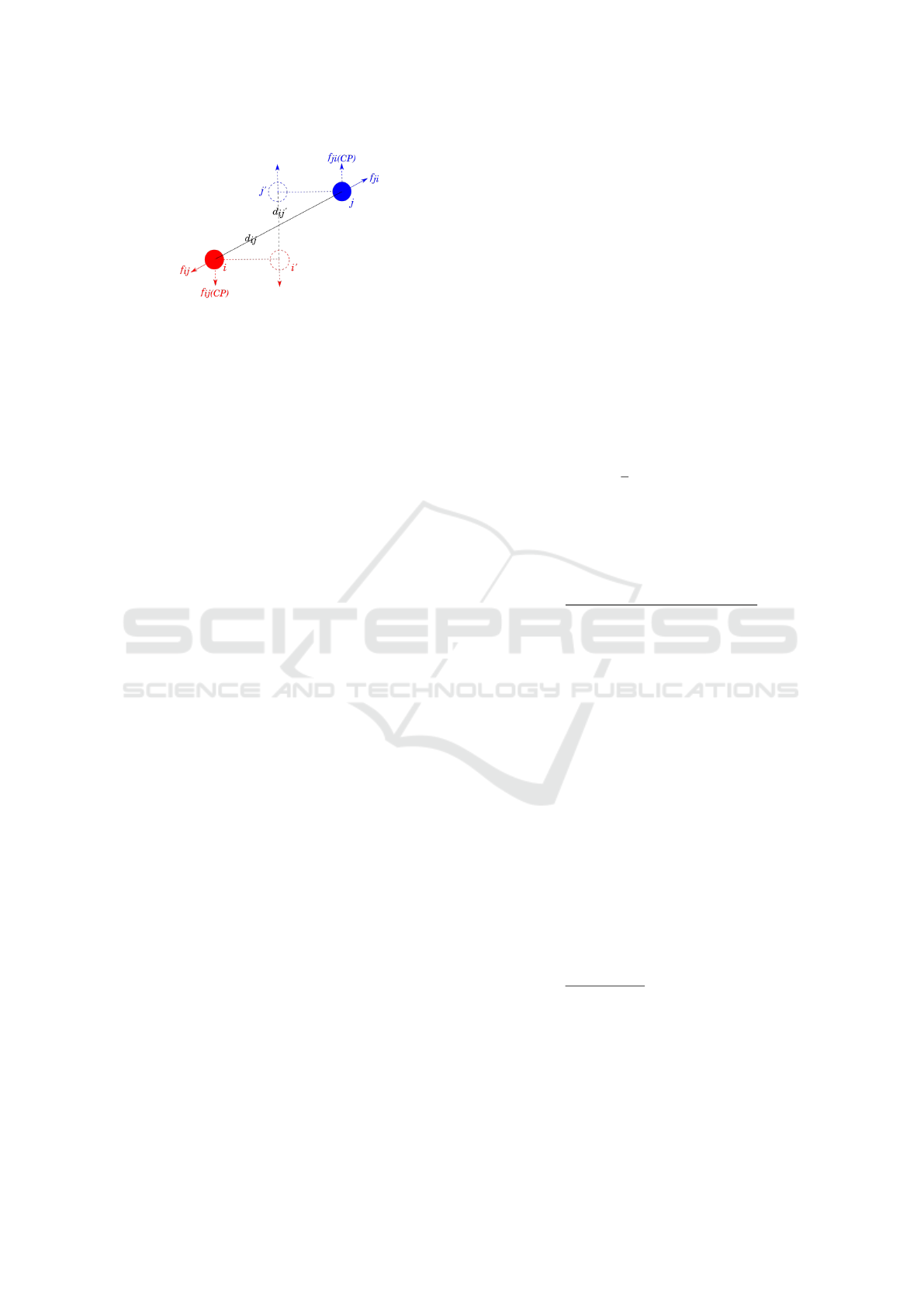
Figure 3: Comparison between f
i j
and f
CP
i j
when two
agents i and j meet face to face in a corridor
a finite horizon time window T , using the state of the
system of the current time
¯
t as the initial state. The
horizon time is hence divided into h steps of fixed
length ∆t, such that h∆t = T . k is then used to rep-
resent each time step with k ∈ {0,1, .. ., h}.
Reactive Planning. For reactive planning, the robot
motions do not influence the human ones. Thus, once
the robot detects a person in the environment, it pre-
dicts the human future state by using HSFM and then
modifies its own trajectory to avoid collisions. The
optimization problem can be defined as:
argmin
{
u
u
u
r
(0)···u
u
u
r
(h)
}
h
∑
k=0
γ
1
F
goal
(k) + γ
2
F
energy
(k) (12)
s.t. Model: q
q
q
r
(k + 1) = q
q
q
r
(k) +
˙
q
q
q
r
(u
u
u
r
(k))4t
Constraints: g
1
(k); g
2
(k); g
4
(k)
State feedback:
(
q
q
q
r
(0) =
ˆ
q
q
q
r
(
¯
t)
{
q
q
q
i
(0)···q
q
q
i
(h)
}
=
{
ˆ
q
q
q
i
(
¯
t)···
ˆ
q
q
q
i
(
¯
t + h)
}
Proactive-cooperative Planning. For proactive-
cooperative planning, the robot not only needs to ac-
complish its navigation task as for the reactive plan-
ning but also to express its cooperation willingness
clearly while, at the same time, maximizing the hu-
man comfort by respecting social rules. The predicted
human trajectories and the robot ones are updated at
the same time by using the EHSFM with CP. The op-
timization problem is defined as:
argmin
{
u
u
u
r
r
r
(0)···u
u
u
r
r
r
(h)
}
h
∑
k=0
γ
1
F
goal
(k) + γ
2
F
energy
(k) + γ
3
F
indiv
(k)
+γ
4
F
dir
(k) + γ
5
F
ttc
(k) + γ
6
F
group
(k)
(13)
s.t. Model:
(
q
q
q
r
(k + 1) = q
q
q
r
(k) +
˙
q
q
q
r
(u
u
u
r
(k))4t
q
q
q
i
(k + 1) = q
q
q
i
(k) +
˙
q
q
q
i
(q
q
q
i
(k), q
q
q
r
(k))4t
Constraints: g
1
(k); g
2
(k); g
3
(k); g
4
(k); g
5
(k)
State feedback:
(
q
q
q
r
(0) =
ˆ
q
q
q
r
(
¯
t)
q
q
q
i
(0) =
ˆ
q
q
q
i
(
¯
t)
4.1 Cost Function
In (12) and (13), the cost function is composed of:
Reach the Goal. The robot has to reach a given goal
or a close area around it.
F
goal
(k) =
p
p
p
r
(k) − p
p
p
goal
r
(
¯
t)
2
(14)
Energy Consuming. The energy at each time step k:
F
energy
(k) =
k
u
u
u
r
(k)
k
2
(15)
Individual Comfort. The influence of the robot mo-
tion on each person is modeled by the interaction
force. The cost function for individual comfort is:
F
indiv
(k) =
f
f
f
CP
ir
(k)
2
(16)
Group Comfort. The cost to separate or compress the
group because of robot motion can be formalized by
the potential energy of the spring in the group:
F
group
(k) =
1
2
s
g
(d
grp
(k) − l
grp
)
2
(17)
Directionality. The directional cost function penal-
izes the face to face behavior between humans and the
robot to increase the legibility of robot motion. The
evaluation parameter of directional cost is (Khamb-
haita and Alami, 2020)
c
dir
(k) =
v
v
v
r
(k) ·
−−→
p
p
p
r
p
p
p
i
(k) + v
v
v
i
(k) ·
−−→
p
p
p
i
p
p
p
r
(k)
C(k)
2
(18)
where C is the distance between robot and human i.
The penalty cost function for directionality is F
dir
(k)
=
(ζ
dir
+ ε) − c
dir
(k) if c
dir
(k) < (ζ
dir
+ ε
dir
)
0 otherwise
(19)
where ζ
dir
is a threshold of activation, ε is a parameter
that takes into account the accuracy of the directional
estimation. Notice that, higher relative velocity and
shorter distance means a higher penalty. The direc-
tional cost function sets up the tread-off between the
effect of slowing down and changing the path.
Time to Collision. The robot is expected to look
ahead and anticipate its actions clearly. The minimum
distance between the robot and human i in a future
time window η is
d
ttc
(k) = min
t
m
∈(0,η)
k
(p
p
p
r
+ v
v
v
r
t
m
) − (p
p
p
i
+ v
v
v
i
t
m
)
k
2
(20)
while the cost function corresponding to the minimum
human-robot distance within η is
F
ttc
(k) =
(
(ρ
ttc
+ε)−d
ttc
(k)
C(k)
2
if d
ttc
(k) < (ρ
ttc
+ ε)
0 otherwise
(21)
If d
ttc
is smaller than a certain threshold ρ
ttc
, then the
cost function is activated and, if minimized, pushes
the robot to move sideways in head of time η. There-
fore, the robot clearly suggests a solution to the hu-
man on how reducing the risk of a potential collision.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
416

4.2 Constraint
The constraints that guarantee safety and comfort are:
Proxemic constraint. The proxemics theory intro-
duced in (Twitchell Hall, 1966) defines areas around
people with different distances of interaction w.r.t. the
others, e.g. the intimate space is within 0.45m and
the personal space is within 1.2m. Since the scenario
for our task is extremely constrained, the robot may
go into the pedestrian’s personal space but it should
never violate the intimate space to guarantee comfort.
Thus, the distance between pedestrian i (with i ∈ N)
and the robot should be bigger than the intimate space
radius ξ
per
, i.e.
g
1
(k) : r
r
+ r
i
+ ξ
per
−
k
p
p
p
r
(k) − p
p
p
i
(k)
k
< 0 (22)
Safety Distance Constraint to Walls. The robot
should stay sufficiently far from walls. The walls are
defined as line segments in 2D. The distance d
rw
i
be-
tween each wall w (with w ∈ W ) and the robot must
be bigger than the safety distance ξ
wall
. Moreover, the
robot motion should not push the human i too close to
the wall. Thus, these constraints are:
g
2
(k) : r
r
+ ξ
wall
− d
rw
(k) < 0 (23)
g
3
(k) : r
i
+ ξ
wall
− d
iw
(k) < 0 (24)
Safety Distance Constraint to Obstacles. Each obsta-
cle is defined as a circumscribing disc-shaped object
with center position p
p
p
o
and radius r
o
. The definition
of safety constraint to obstacles are similar to safety
constraint to walls.
g
4
(k) : r
r
+ ξ
obs
− d
ro
(k) < 0 (25)
g
5
(k) : r
i
+ ξ
obs
− d
io
(k) < 0 (26)
5 RESULTS AND ANALYSIS
Simulations are done in Matlab
c
. The total simula-
tion time is 10s. The size of the horizon time window
is T = 5s. At each time step, the future control input
consists of a sequence of 10 piece-wise constant val-
ues. As a consequence, ∆t = 0.1s. Three scenarios of
interactions between one single person and one single
robot have been considered. Scenario 1: one single
person and one robot meet face to face in a corridor;
Scenario 2: one single person and one robot perform
a 90
o
path-crossing; Scenario 3: as in scenario 1 with
an obstacle partially blocking the way. For these sce-
narios, a comparison between reactive and proactive-
cooperative planning has been done. Finally, in Sce-
nario 4 one robot meets a group of persons.
Model Parameter. As mentioned in (Khambhaita
and Alami, 2017), the parameter re-tuning or learn-
ing under different scenarios is required for every
state of the art human motion prediction method
since humans behave differently in different situa-
tions. The parameters used in each scenario (see Ta-
ble 1) are tuned manually. More reasonable values
can be learned through data analysis of real experi-
ments (Ferrer and Sanfeliu, 2019) in future works.
Table 1: Parameters of Human Motion Model.
Scenario N
◦
A
0
j
B
0
j
A
0
r
B
0
r
A
0
o
B
0
o
A
0
w
B
0
w
(1) 250 6 250 6 0 0 2000 0.08
(2) 250 15 250 15 0 0 2000 0.08
(3) 250 12 250 12 400 0.5 2000 0.08
(4) 250 6 250 6 0 0 2000 0.08
(5) 250 6 250 6 0 0 2000 0.08
Optimization Parameters. The weighting parameters
and penalty thresholds for each cost function need to
be re-tuned for each scenario in order to have proper
behavior. The parameters used in this paper are in Ta-
ble 2. The proxemics distance is set to ξ
per
= 0.45 m.
The safety distance between human (robot) and the
wall and the obstacle are set to ξ
wall
= 0.2 m, ξ
obs
=
0.1 m. The collision time window is set to η = 8 s.
Table 2: Weighting Parameters and Penalty Thresholds.
Scenario N
◦
γ
1
γ
2
γ
3
γ
4
γ
5
γ
6
ζ
dir
ρ
ttc
(1) 1 1 0.005 200 200 0 0.5 2
(2) 0.1 1 0.05 100 100 0 1 1
(3) 1 1 0.05 100 100 0 0.5 2
(4) 1 1 0.005 200 200 0 0.5 2
(5) 1 1 0 100 100 1 0.5 2
Human and Robot Characteristic. Human mass is
75 kg and inertia I
i
= 0.045 kg m
2
. Humans radius
is r
i
= 0.3 m. We assume that humans reach the de-
sired velocity of 1.5 m/s in φ = 0.5 s. Robot radius
is 0.3 m. The linear velocity v
r
∈ [0, 2] and angular
velocity w
r
∈ [−1,1].
Environment Parameters. The origin of the world
reference frame is fixed at the bottom left corner of the
wall on the left, with x
W
and y
W
axis along with the
horizontal and vertical directions, respectively. The
length and width of the corridor are 15 m and 5 m, re-
spectively. The 90
o
cross path takes place in a square
of 15 × 15 m.
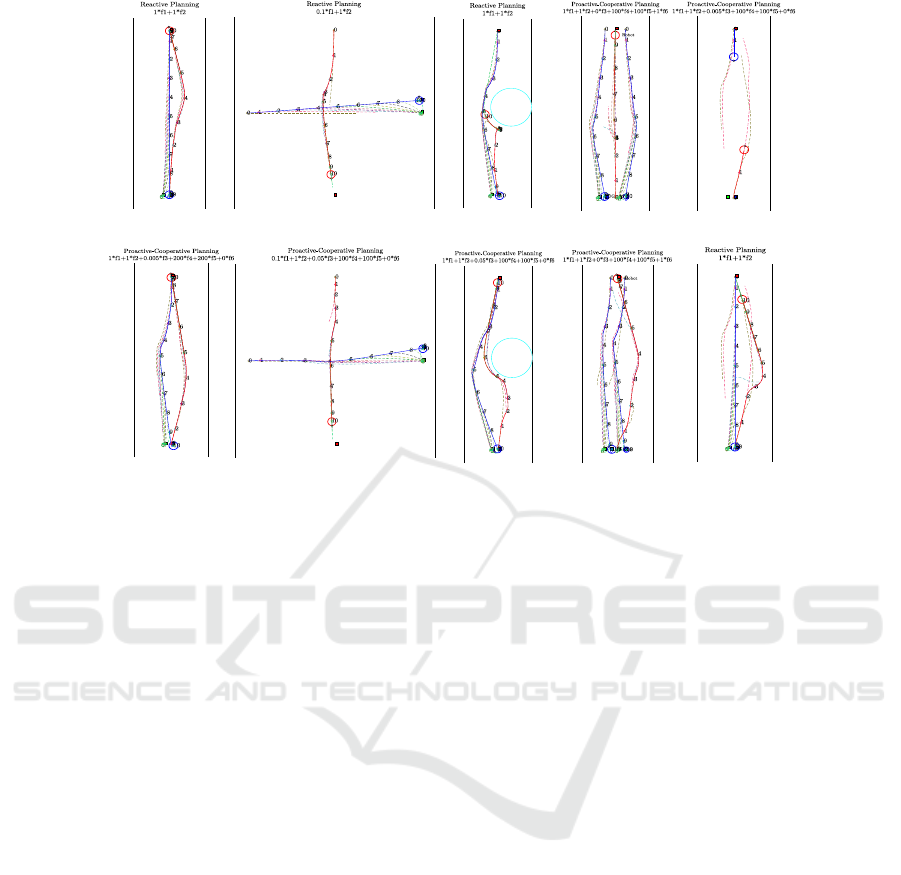
5.1 Simulation Results
The simulation results are reported in Figure 4. The
red (denoted by G
r
) and blue (denoted by G
hAct
)
squares mark the position of the robot and human ac-
tual goal, respectively. In order to introduce some
noise in the human motion prediction, the predicted
Proactive-cooperative Navigation in Human-like Environment for Autonomous Robots
417
G
hAct
G
hPre
Human
G
r
Robot
G
hAct
G
hPre
Human
G
r
Robot
G
hAct
G
hPre
Human
G
r
Robot
G
hAct
G
hPre
Human
G
r
Robot
G
hAct
G
hPre
Human
G
r
Robot
G
hAct
G
hPre
Human
G
r
Robot
G
gAct
G
gPre
G
gAct
G
gPre
G
r
G
hAct
G
hPre
Human
G
r
Robot
G
gAct
G
gPre
G
gAct
G
gPre
G
r
G
hAct
G
hPre
Human
G
r
Robot
(a
1
)
(a
2
)
(b
1
)
(b
2
)
(c
2
)
(e
1
)
(d
1
)
(c
1
)
(d
2
) (e
2
)
Figure 4: Simulation results for the four scenarios (a,b,c,d): Reactive (above) and proactive-cooperative (below); Switching
strategy (e): 0-2s proactive-cooperative planning (above) and 3-10s reactive planning (below).
human navigation goal is set differently and marked
with a green square (denoted by G
hPre
). The red and
the blue continuous curves (dashed curves) are then
executed (planned) robot trajectory and the simulated
(predicted) human trajectory, respectively. The col-
ored circles on the red and blue continuous curves
represent the robot and human positions at each sec-
ond (with the number indicate the time).
Scenario 1. The human starts at the top middle of
the corridor and plans to cross the corridor and reach
his/her goal at the bottom middle(see Figure 4-(a)).
The robot starts at the opposite position of the corri-
dor and plans to reach the top middle of the corridor.
The predicted human goal is 0.5m left of the actual
goal. For the reactive planner, the robot detours to
respect proxemics distance when it is close to the hu-
man. This may make human confused and threatened
by the robot motion. By using proactive-cooperative
planning (see Figure 4-(a), bottom), the robot deceler-
ates while approaching the human and deviates to the
lateral side to clearly show its cooperative intentions
to the human. After the interaction, the robot accel-
erates again to reach its goal. Hence, the trajectory
generated by our proactive-cooperative planning has
higher legibility and is more socially acceptable.
Scenario 2. The human starts at the left middle of
the square and plan to reach the right middle. The
robot starts at the top middle of the square and plans to
reach the bottom middle. The predicted human goal
is 0.5m above the actual goal. By using reactive plan-
ning, the robot starts with high speed and then slows
down and detours on the back of the human (almost
at 4 s of the simulation). On the contrary, by using
proactive-cooperative planning (see Figure 4-(b), bot-
tom), the robot slows down initially as well as moving
straight towards its navigation goal to show its inten-
tions and let the human pass first. Once human passes
the crossing point, the robot accelerates to reach its
goal. During the interaction process, no confusion
seems to be generated as the robot shows its naviga-
tion goal clearly and human accelerates to pass the
crossing point and gives the way to the robot.
Scenario 3. The obstacle is a cylinder with center at
p
p
p
o
= [3.5,8]
T
and radius r
o
= 1.5m. Since the robot
assumes the human will not give the way, during the
time window 3s-8s the robot cannot find a feasible
trajectory to reach the goal (see Figure 4-(c)). The
robot has to turn around and move to the right side to
respect the proxemic constraint during the time win-
dow 5s-6s. Indeed, the predicted human trajectories
are different from real ones. By using our proactive-
cooperative planning (see Figure 4-(c) bottom), the
robot reaches the navigation goal much more effi-
ciently. Moreover, it slows down and moves to the
lateral side to clearly express its politeness. The hu-
man passes first the bottleneck created by the obstacle
and gives enough space to the robot that clearly ex-
pressed to the human its navigation goal.
Scenario 4. The navigation scenario is as for Sce-
nario 1. For the group of mother and son (see Fig-
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
418

ure 4-(d) bottom), κ = 100 and l
gr
= 1 m. For the
group of friends (see Figure 4-(d) top), κ = 10 and
l
gr
= 2 m. For the first case, when the robot meets
a group of mother and son, since the spring stiffness
is very high and may cost much energy to separate
them, the robot detours from outside. However, in the
second case, when the robot meets a group of friends,
the robot passes through the group to save energy.
Switching strategy. The result for the corridor sce-
nario is showed in Figure 4-(e). All the parameters for
reactive and proactive-cooperative planner are fixed
to correctly compare the performance of these two
strategies. In real application, for reactive planning,
the robot motion should be more conservative, with
v
r
∈ (0,1] and the proxemic distance ξ
per
= 1.2 m.
For the switching parameters, the initial confidence
Con
int
= 20, Con
thres+
= 10, Con
thres+
= 7, e
thres
= 1,
lonot = 2 and losee = 1. In Figure 4-(f) on the top,
at the beginning the robot proactively communicates
with the human its willingness. During this phase, the
robot evaluates human intentions. Until 2s of simula-
tion, the confidence Con
int
is still beyond the thresh-
old Con
thres−
, thus the robot maintains a proactive and
cooperative behavior. However, in the following (see
Figure 4-(f) bottom), the real human trajectory dif-
ferentiates from the predicted one, thus Con
int
falls
below the confidence threshold Con
thres−
: the robot
switches to reactive planning to guarantee safety.
6 CONCLUSIONS
A Proactive-cooperative planning for a mobile robot
and a switching strategy to pass from a purely reac-
tive to a proactive behavior depending on the confi-
dence about human intentions is provided. Simula-
tions show the effectiveness of our method. The many
parameters introduced for modeling the human mo-
tion model in different situations are the main draw-
back of our method. Future works will be dedicated
to include some learning strategies (e.g. (Ferrer and
Sanfeliu, 2019) and (Che et al., 2020)) to determine
these parameters and automatically adapt the method
to any situation. Moreover, a simulator for taking onto
account more realistic human motions will be consid-
ered. Finally, real experiments are required to defi-
nitely validate the proposed machinery.
REFERENCES
Bevilacqua, P., Frego, M., et al. (2018). Reactive planning
for assistive robots. IEEE Robotics and Automation
Letters, 3(2):1276–1283.
Bruneau, J., Olivier, A., and Pettr
´
e, J. (2015). Going
through, going around: A study on individual avoid-
ance of groups. IEEE Trans. on Visualization and
Computer Graphics, 21(4):520–528.
Che, Y., Okamura, A. M., and Sadigh, D. (2020). Efficient
and trustworthy social navigation via explicit and im-
plicit robot–human communication. IEEE Transac-
tions on Robotics, pages 1–16.
Farina, F., Fontanelli, D., et al. (2017). Walking ahead: The
headed social force model. PLOS ONE, 12(1):1–23.
Ferrer, G. and Sanfeliu, A. (2019). Anticipative kino-
dynamic planning: Multi-objective robot navigation
in urban and dynamic environments. Autonomous
Robots, 43(6):1473–1488.
Helbing, D. and Moln
´
ar, P. (1995). Social force model for
pedestrian dynamics. Physical Review E, 51:4282–
4286.
Johansson, A., Helbing, D., and Shukla, P. K. (2007). Spec-
ification of the social force pedestrian model by evo-
lutionary adjustment to video tracking data. Advances
in Complex Systems, 10:271–288.
Khambhaita, H. and Alami, R. (2017). Assessing the social
criteria for human-robot collaborative navigation: A
comparison of human-aware navigation planners. In
Proc. IEEE ISRHIC, pages 1140–1145.
Khambhaita, H. and Alami, R. (2020). Viewing robot navi-
gation in human environment as a cooperative activity.
In Robotics Research, pages 285–300.
Mombaur, K., Truong, A., and Laumond, J.-P. (2010). From
human to humanoid locomotion—an inverse optimal
control approach. Autonomous Robots, 28(3):369–
383.
Snape, J., van den Berg, J. P., et al. (2011). The hybrid
reciprocal velocity obstacle. IEEE Transactions on
Robotics, 27:696–706.
Tamura, Y., Le, P. D., et al. (2012). Development of pedes-
trian behavior model taking account of intention. In
IEEE/RSJ IROS, pages 382–387.
Trautman, P., Ma, J., et al. (2013). Robot navigation in
dense human crowds: the case for cooperation. In
Proc. IEEE ICRA, pages 2153–2160.
Truong, X. and Ngo, T. D. (2017). Toward socially aware
robot navigation in dynamic and crowded environ-
ments: A proactive social motion model. IEEE TASE,
14(4):1743–1760.
Twitchell Hall, E. (1966). The hidden dimension. Garden
City, N.Y., Doubleday.
Zanlungo, F., Ikeda, T., and Kanda, T. (2011). Social force
model with explicit collision prediction. EPL (Euro-
physics Letters), 93:68005.
Proactive-cooperative Navigation in Human-like Environment for Autonomous Robots
419
