
A Genetic Algorithm for Automated Test Generation for Satellite
On-board Image Processing Applications
Ulrike Witteck
1
, Denis Grießbach
1
and Paula Herber
2
1
Institute of Optical Sensor Systems, German Aerospace Center (DLR), Berlin-Adlershof, Germany
2
Embedded Systems Group, University of M
¨
unster, Germany
Keywords:
Image Processing, Software Testing, Genetic Algorithms.
Abstract:
Satellite on-board image processing technologies are subject to extremely strict requirements with respect to
reliability and accuracy in hard real-time. In this paper, we address the problem of automatically selecting test
cases that are specifically tailored to provoke mission-critical behavior of satellite on-board image processing
applications. Because such applications possess large input domains, it is infeasible to exhaustively execute all
possible test cases. In particular, because of their complex computations, it is difficult to find specific test cases
that provoke mission-critical behavior. To overcome this problem, we define a test approach that is based on a
genetic algorithm. The goal is to automatically generate test cases that provoke worst case execution times
and inaccurate results of the satellite on-board image processing application. For this purpose, we define a
two-criteria fitness function that is novel in the satellite domain. We show the efficiency of our test approach on
experimental results from the Fine Guidance System of the ESA medium-class mission PLATO.
1 INTRODUCTION
In the satellite domain, on-board image processing ap-
plications are subject to extremely strict requirements
especially with regard to reliability and accuracy in
hard real-time. It is important to test such applications
extensively. But their huge input domain makes man-
ual testing error-prone and time-consuming. Further,
executing all possible test cases is impossible.
Therefore, we are interested in a test approach that
automatically and systematically generates test cases
for testing satellite on-board image processing appli-
cations. However, the automated test generation for
on-board image processing applications poses a major
challenge: due to complex algorithmic computations
it is difficult to select test cases with a high probability
to provoke mission-critical behavior. Mission-critical
behavior means scenarios where, for example, the real-
time behavior of the system or the delivered mathe-
matical accuracy does not meet specified requirements.
Such scenarios may cause system failures, damages,
or unexpected behavior during mission lifetime.
In (Sthamer et al., 2001; Wegener and Mueller,
2001; Varshney and Mehrotra, 2014; H
¨
ansel et al.,
2011), various automated test approaches for several
real-time embedded systems in different domains are
presented. The authors investigate systems with huge
input domains and complex functional-behavior. How-
ever, the presented approaches are not designed to
search for test cases provoking real-time critical be-
havior and scenarios where the mathematical accuracy
of the application gets critically low.
In this paper, we present a genetic algorithm based
approach to automatically generate test cases that pro-
voke mission-critical behavior of the system. It is
based on the master thesis of the first author (Witteck,
2018). With this approach, we aim for an improvement
of a given test suite to support robustness testing. In
general, a genetic algorithm solves search or optimiza-
tion problems by applying evolutionary mechanisms.
It evaluates solutions with respect to given criteria us-
ing a fitness function and improves the best solutions
to satisfy these criteria (Moheb R. Girgis, 2005).
For our proposed test approach, we define a novel
two-criteria fitness function based on real-time behav-
ior and mathematical accuracy provided by a satel-
lite on-board image processing application. With this
fitness function, our genetic algorithm automatically
steers the search towards test cases that provoke long
execution times and mathematically inaccurate results.
We use the Fine Guidance System (FGS) algorithm
of the European Space Agency (ESA) mission PLAne-
tary Transits and Oscillation of stars (PLATO) as a case
study to investigate the efficiency of our test approach.
128
Witteck, U., Grießbach, D. and Herber, P.
A Genetic Algorithm for Automated Test Generation for Satellite On-board Image Processing Applications.
DOI: 10.5220/0009821101280135
In Proceedings of the 15th International Conference on Software Technologies (ICSOFT 2020), pages 128-135
ISBN: 978-989-758-443-5
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

The FGS algorithm is a satellite on-board image pro-
cessing algorithm that calculates high-precision atti-
tude data of the spacecraft by comparing tracked star
positions in image frames taken on board with known
star positions from a star catalog. The experimental
results show the efficiency of the genetic approach in
terms of the automated search of specific test cases
tailored for robustness testing.
This paper is structured as follows: Section 2 de-
scribes the concept of genetic algorithms in general.
Furthermore, it gives an introduction of the PLATO
mission and the PLATO FGS algorithm. Section 3
outlines related work on the use of genetic algorithms
for test case generation. Section 4 presents our ge-
netic algorithm. First, it provides our description of
the algorithm components. Then, it gives an overview
of our automated test case generation approach. Our
implementation and experimental results are presented
in Section 5. Finally, Section 6 provides a summary of
the main results and gives an outlook on future work.
2 PRELIMINARIES
In this section, we introduce the concept of genetic
algorithms in general and give an overview of the
PLATO mission as well as its mission-critical FGS
algorithm.
2.1 Genetic Algorithms
Manual test case generation for embedded software
tests is often error-prone and inefficient. Especially,
the large the number of input parameter combinations
makes manual testing expensive. A solution to this
problem is an automated test approach, designed to
search for test cases specifically tailored to provoke
erroneous behavior, i.e. the violation of given system
requirements. A promising approach is based on ge-
netic algorithms. The test case design is thus an opti-
mization problem: the genetic algorithm searches for
parameter combinations that satisfy given test criteria.
In general, a genetic algorithm is a search-based
method that solves complex optimization problems.
The approach evaluates automatically generated op-
timization parameters with respect to predefined test
criteria using a cost function. It is an efficient method
which rapidly delivers high-quality solutions to a prob-
lem (Alander and Mantere, 1999; Sharma et al., 2016).
Genetic algorithms are inspired by the concept of
biological evolution. The solutions to a problem ex-
perience evolutionary mechanisms like selection, mu-
tation, and recombination. In terms of genetic algo-
rithms, a solution to a problem is considered as an
individual. It consists of a specified number of genes.
The algorithm uses the cost function to assign a fit-
ness value to each individual as a measure of their
quality with respect to specified criteria. In each gen-
eration, the genetic algorithm creates a population of
individuals from previously created individuals. This
is done until a population satisfies a certain criterion.
The fitness value is decisive for the survival proba-
bility of an individual and therefore for the selection
into the next generation. The selection strategy affects
the convergence of the genetic algorithm. A too high
convergence is a common problem. In that case, the
algorithm delivers a locally optimal solution. How-
ever, solutions do not evolve if the convergence is too
low. To generate new individuals the genetic algorithm
applies crossover and mutation operators. The goal of
the crossover operator is to generate a better popula-
tion by exchanging genes from fitter individuals. The
mutation operator preserves the diversity of genes by
inserting new genes into the population (Sharma et al.,
2016; Moheb R. Girgis, 2005; Gerdes et al., 2004).
An advantage of genetic algorithms is the possibil-
ity to run on parallel processors. They solve different
complex, computation intensive problems, with many
possible solutions in a wide search-space. It is possi-
ble to automatically search in a huge input domain for
optimal test data that provoke a specified behavior of
the software application (Alander and Mantere, 1999;
Moheb R. Girgis, 2005; Gerdes et al., 2004).
2.2 Case Study: PLATO Mission
PLATO is an ESA mission in the long-term space
scientific program “cosmic vision”. The main mission
goal is to find and characterize Earth-like exoplanets
orbiting in the habitable zone of solar-type stars.
Its scientific objective is achieved by long unin-
terrupted ultra-high precision photometric monitoring
of large samples of bright stars. This requires a very
large Field of View (FoV) as well as a low noise level.
To achieve a high pupil size and the required FoV
the instrument contains 26 telescopes for star obser-
vation. 24 normal cameras monitor stars fainter than
magnitude
8
at a cycle time of
25 s
. Two fast cameras
observe stars brighter than magnitude
8
at a cycle time
of
2.5 s
. The cameras are equipped with four Charge
Coupled Devices (CCDs) in the focal plane, each with
4510 × 4510
pixels. Each fast camera comes with a
data processing unit that runs the FGS algorithm. The
algorithm calculates attitude data with an accuracy of
milliarcseconds from the CCD image data.
In each cycle, the FGS reads a
6 × 6
pixel window
for each guide star from a full CCD-image. Guide stars
are predefined stars in a star catalog that satisfy given
A Genetic Algorithm for Automated Test Generation for Satellite On-board Image Processing Applications
129

criteria. A linear center of mass calculation estimates
the initial centroid position in each window. To get a
more precise solution, the FGS algorithm refines each
centroid using a Gaussian Point Spread Function (PSF)
observation model. The PSF describes the distribution
of star light over CCD pixels. Based on measured
pixel intensities, the algorithm determines the PSF
model including: centroid position, intensity, image
background and PSF-width. A non-linear least square
fitting method iteratively refines the parameters.
The input star signal affects the quality of the cen-
troid calculation. If the star signal in a pixel is little
interfered by noise and the signal-to-noise ratio is high,
the star information is usable. The distribution of the
star signal over pixels depends on the star position
on the Focal Plane Assembly (FPA), the sub-pixel po-
sition, the magnitude and the PSF shape. If the star
signal in the window pixels is not sufficiently good,
then the centroid estimation is less accurate or the
algorithm does not converge or converges late.
The FGS algorithm transforms the pixel coordi-
nates of the calculated centroid position into a star
direction vector. From at least two star directions and
the corresponding reference vectors from a star cat-
alog, the algorithm calculates the attitude by means
of the QUaternion ESTimator (QUEST) algorithm.
Within the QUEST algorithm, the scalar TASTE test
measures the validity of the input data (Shuster, 2008).
The TASTE value is high, if an input star is misidenti-
fied (Griebach, 2020). We use the value as a qualitative
measure of the mathematical accuracy of the FGS al-
gorithm and denote it as quality index.
The input of the FGS algorithm is a combination
of stars. Since the star parameters of a single star
affect the performance and accuracy of the centroid
calculation, the performance and accuracy of the FGS
algorithm depends on the combination of input stars.
If the FGS result is incorrect or the delivery is too
late, then the attitude data is unusable. In this case,
all captured science data cannot be further processed
and the mission is lost. Hence, the FGS is regarded as
mission-critical component, which therefore requires
an extensive test procedure (Pertenais, 2019).
3 RELATED WORK
Various papers describe automated software test meth-
ods which use genetic algorithms. In (Varshney and
Mehrotra, 2014; Sthamer et al., 2001; H
¨
ansel et al.,
2011), the authors used genetic algorithms to auto-
matically generate test data for structural-oriented
tests, like control flow testing and data flow testing.
Function-oriented tests, for example examining the
temporal behavior of an application are shown in
(Sthamer et al., 2001; Wegener and Mueller, 2001).
Genetic algorithms for structural testing are used
in (Varshney and Mehrotra, 2014). Their algorithm
uses data flow dependencies of a program to auto-
matically optimize test data. The study shows that
genetic algorithms are feasible to generate test data
that achieve high coverage of variable definition and
reference paths in the program code. Moreover, the
study shows that data generated by the genetic algo-
rithm achieves higher coverage of the program flow
graph in fewer generations than data generated by ran-
dom testing. However, we look for a test approach that
does not depend on the internal system structure.
In (Sthamer et al., 2001), the authors used an evolu-
tionary approach to investigate the temporal behavior
of embedded systems. Their approach automatically
searches for input situations where the system under
test violates specified timing constraints. Their fitness
function is based on the execution time. Sthamer et
al. used an engine control system as a case study. The
experiments show that the evolutionary approach gen-
erates test data that detect errors in the timing behavior
of systems with large input domain and strict timing
constraints. The study shows that the evolutionary ap-
proach is applicable to different test goals as well as for
testing systems of various application fields. But, our
goal is to consider temporal behavior as well as mathe-
matical accuracy of image processing applications for
various input values. We define a fitness function that
includes additional metrics to evaluate the individuals.
All of these approaches show that genetic algo-
rithms improve the software test efficiency. The stud-
ies confirm that genetic algorithms are suitable to au-
tomatically generate test cases that satisfy special test
criteria from a wide input domain. However, the fitness
function must be adapted to the specific problem.
4 GENETIC TEST APPROACH
Many satellite on-board image processing applications
perform complex algorithmic computations. Such
computations make it hard to find test cases that are
tailored to provoke real-time critical behavior or sce-
narios where the mathematical accuracy gets critically
low. But, such test cases are necessary to verify com-
pliance with strict requirements of satellite on-board
image processing applications in reliability and mathe-
matical accuracy in hard real-time.
To overcome this problem, we define a test ap-
proach based on a genetic algorithm that automatically
searches for test cases to increase the robustness of a
given system. Our key idea is a novel two-criteria fit-
ICSOFT 2020 - 15th International Conference on Software Technologies
130
Select Init
Population
Init
Population
Fitness
Evaluation
Termination
Conditions
met?
Selection
Parent
Population
Crossover
Child
Population
Mutated
Population
Mutation
Genetic Algorithm
Complete
Test Set
Improved
Test Set
Configuration
Parameters
no
yes
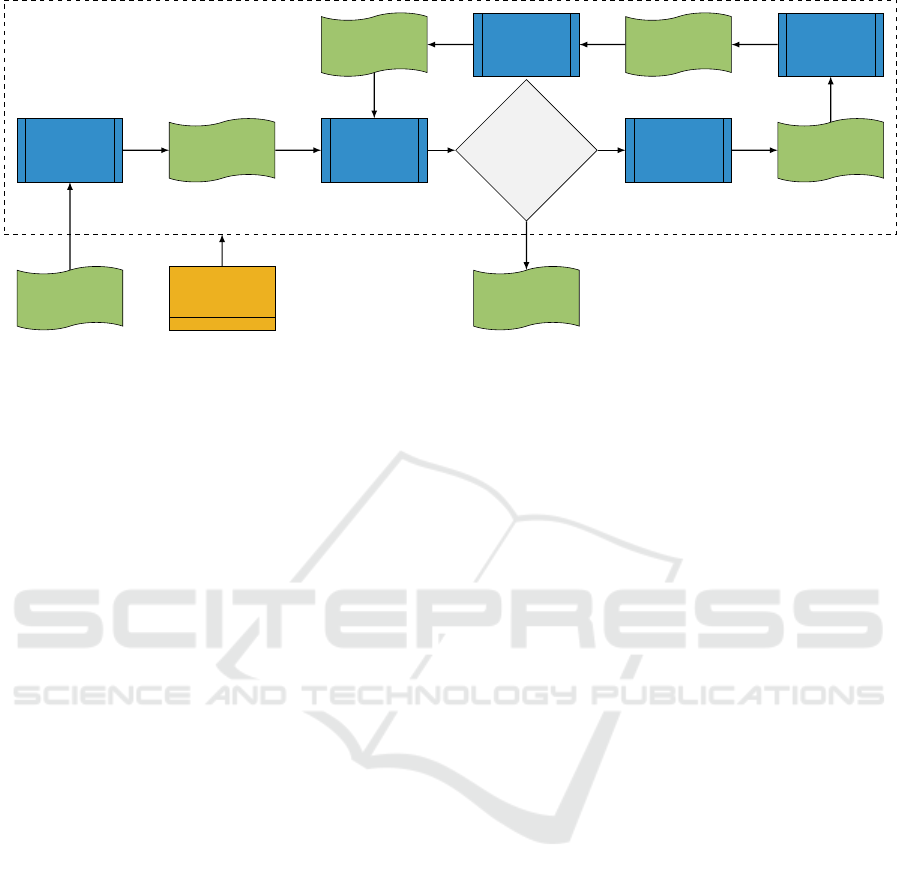
Figure 1: Overview of the automated test case generation approach.
ness function that is specifically tailored for the domain
of satellite on-board image processing application.
Figure 1 gives an overview of our proposed ap-
proach. As the figure depicts, input of our genetic
algorithm (see Section 4.2) is a test set with complete
coverage on the input domain and a parameter specifi-
cation to configure the genetic approach. To calculate a
complete test set, we have used an approach for equiv-
alence class testing of on-board satellite image pro-
cessing applications presented in (Witteck et al., 2019).
Their presented approach partitions all input parame-
ters of the FGS algorithm into equivalence classes and
systematically selects representative inputs from each
partition. Our genetic algorithm selects test cases from
the complete test set and evaluates them according to
their fitness values. It iteratively evolves promising
test cases using evolutionary mechanisms, namely se-
lection, crossover, and mutation. As a result, it delivers
test cases that satisfy given test criteria.
4.1 Assumptions and Limitations
We consider systems whose inputs are objects in an
image. In our case study, the observed objects are stars
uniformly distributed in the image (Griebach, 2020).
Performance and mathematical accuracy of the FGS
algorithm depend on the number and distribution of
preselected guide stars. We specify a test case as a
combination of 30 stars, since previous experiments
have shown that 30 input stars provide sufficiently
good results. In our test approach, we take four star
parameters into account that affect run time and mathe-
matical accuracy of the FGS algorithm: position in the
image, magnitude, sub-pixel position and PSF shape.
A test set consists of several stars. We denote a test
set as complete if it reaches full coverage on the input
domain with respect to the coverage criteria defined in
(Witteck et al., 2019). Thus the set includes one star
for each equivalence class combination.
In our test approach, we use the TASTE-value as
a qualitative measure of the mathematical accuracy
of the FGS algorithm. Hence, a low quality index
corresponds to a high accuracy of the FGS algorithm.
4.2 Genetic Algorithm
We use a genetic algorithm to automatically search
for test cases in a given test set that provoke mission-
critical behavior with respect to run time and mathe-
matical accuracy. In the following, we describe the
components and strategies of our genetic approach.
Individual Representation.
In terms of our genetic
algorithm, a test case represents an individual with
30 genes, analogous a test case with 30 stars. Our
individual representation is based on the equivalence
class definitions described in (Witteck et al., 2019). We
define a gene as a tuple of equivalence class identifiers
(i
P
, i
M
, i
E
, i
G
)
where
P
defines the position of the star
in the image,
M
the magnitude of the star,
E
the sub-
pixel position, and G the PSF shape.
Initial Population.
Our genetic algorithm uses a
complete test set as search space. For each individual,
the algorithm randomly selects 30 stars from this space.
Each selected star covers a different combination of
equivalence classes. The tester specifies the population
size and the genetic algorithm generates individuals
until the required population size is reached.
Fitness Function.
To evaluate the suitability of an
individual to survive, the genetic algorithm calculates
a fitness value by means of a fitness function.
A Genetic Algorithm for Automated Test Generation for Satellite On-board Image Processing Applications
131
In Equation (1), we define a two-criterion fitness
function that depends on execution time and quality
index of the FGS execution. To capture a trade-off
between both parameters and to define the impact of
the parameters on the new generation, we apply the
weighted sum with weighting factors w
time
and w
taste
.
fitness(c) = f
time
(c) · w
time
+ f
taste
(c) · w
taste
,
with f
time
(c) =
time
a
time
, f
taste
(c) =
taste
a
taste
,
0 ≤ w
time
, w
taste
≤ 1 and w
time
+ w
taste
= 1
(1)
f itness(c)
provides the fitness of an individual
c
. In-
dividuals that cause long execution times and a high
quality index, i.e. a low accuracy, have a high fitness
value. They are fitter than individuals with lower fit-
ness values.
f
time
(c)
calculates the fitness value of an
individual
c
with respect to the FGS execution time.
f
taste
(c)
calculates the fitness value of an individual
c
with respect to the quality index. Since both metrics
have different magnitudes, we normalize the values us-
ing reference values before combining them in the fit-
ness function. The tester defines both reference value
a
time
and
a
taste
for example as average of execution
times or quality values measured by random testing.
Input: population, w
time
, w
taste
, a
time
, a
taste
Output: fitTime, fitTaste, populationFit
1 maximalFit = populationFit = 0;
2 foreach individual ∈ population do
3 time, taste = FGS(individual);
4 fitValue =
time
a
time
· w
time
+
taste
a
taste
· w
taste
;
5 if fitValue > maximalFit then
6 maximalFit = fitValue;
7 fitTime = time;
8 fitTaste = taste;
9 end
10 individual.fit = fitValue;
11 populationFit += fitValue;
12 end
Algorithm 1: Fitness evaluation.
In the evaluation process (Line 12), our genetic
algorithm sends each individual in the population as
input to the FGS algorithm and calculates its fitness
value by means of our fitness function. Line 12 also
provides the longest execution time fitTime, the worst
quality index fitTaste and the sum of fitness values
populationFit of the whole population.
Selection.
Our genetic algorithm applies the stochas-
tic universal sampling method to select the fittest indi-
viduals to generate a new population. Each individual
gets a section on a imaginary roulette-wheel propor-
tional to its fitness value. Equally spaced pointers are
arranged around the wheel. The number of pointers
corresponds to the population size. After turning the
wheel once, the algorithm inserts each individual on
whose field a pointer points to into the new population.
The probability of each individual to be selected is
proportional to its fitness value. The selection method
reduces the evolutionary pressure but also preserves
the variability in the population by selecting test cases
with low fitness values (Gerdes et al., 2004, pp. 79-83).
Crossover.
Our genetic algorithm performs the pa-
rameterized uniform crossover strategy to create new
individuals (Gerdes et al., 2004, p. 89). The crossover
mechanism randomly chooses two not yet selected in-
dividuals as parents from the population. For every
single gene of the parents, the genetic algorithm de-
cides according to the crossover probability
p
c
whether
the genes are exchanged or not. The genes do not cross
if one of them is already contained in its target indi-
vidual. The genetic algorithm applies the crossover
operator to each pair in the population. As a result,
the crossover mechanism returns a child population
containing new individuals. We define that the tester
specifies the crossover probability p
c
.
Mutation.
The mutation process decides according
to a mutation probability
p
m
for each gene of each
individual in the population whether the gene mutates
or not. Depending on the mutation probability
p
m
,
the mutation function preserves the diversity in the
population or inserts minimal changes to find test cases
that locally provoke critical behavior (Gerdes et al.,
2004). The tester specifies the mutation probability
p
m
.
If the gene mutates, the genetic algorithm randomly
selects a new star from its search space, which is not
contained in the individual, as a gene. As a result, the
mutation process returns a new mutated population.
Termination Condition.
The genetic algorithm ter-
minates if it reaches a given number of generations, if
the best solution has not improved in the last
n
genera-
tions (Bhandari et al., 2012), or if the FGS algorithm
execution time exceeds a predefined value. The tester
defines these criteria.
4.3 Automated Test Generation
The objective of our test approach is to find star combi-
nations that provoke long execution times and inaccu-
rate results of the satellite on-board image processing
application. To define a comparatively concise search
ICSOFT 2020 - 15th International Conference on Software Technologies
132

space for our genetic algorithm, we utilize the parti-
tioning of the input parameters of the FGS algorithm
presented in (Witteck et al., 2019). A given test set con-
tains one star per equivalence class combination of the
parameters. This results in approximately
2.8 × 10
55
possible combinations of 30 stars as FGS input. Test-
ing all possible combinations is infeasible. Our key
idea is a genetic algorithm that is specifically tailored
to find particular test cases in a large input domain.
Algorithm 2 gives an overview of the structure of
our defined genetic algorithm using the components
described in Section 4.2. The test set TS, which is
complete with respect to the equivalence classes de-
fined in (Witteck et al., 2019) is the search space of
our genetic algorithm. The algorithm creates the initial
population by randomly selecting stars from its test set
until the population size popSize is reached. Using our
two-criterion fitness function, the algorithm calculates
the fitness value for each individual based on the ex-
ecution time and quality index delivered by the FGS
algorithm. By specifying the parameter weights
w
time
and w
taste
, the tester is flexible to define the test goal.
Input: TS, popSize, w
time
, w
taste
, a
time
, a
taste
,
p
c
, p
m
, T, maxTime
Output: P
1 P ←
/
0;
2 t = fitTime = fitTaste = 0;
3 P ← getInitialPopulation();
4 popFit, fitTime, fitTaste ← evaluation();
5 while t < T and fitTime < maxTime do
6 P ← selection();
7 P ← crossover();
8 P ← mutation();
9 popFit, fitTime, fitTaste ← evaluation();
10 t++;
11 end
Algorithm 2: Genetic algorithm.
Based on the fitness values, our genetic algorithm
generates a new population with fittest individuals in
the selection process. On the newly selected, fitter pop-
ulation, Line 11 performs the parameterized uniform
crossover strategy in the crossover function. This func-
tion generates new individuals by mixing the genes of
selected individuals according to the crossover proba-
bility
p
c
. The genetic algorithm applies the mutation
operator on the newly generated child population. Our
genetic algorithm iteratively evolves individuals until it
reaches a predefined maximum number of generations
T
or the achieved maximum execution time or quality
index of a generation exceeds a specified maximum
execution time maxTime. Line 11 provides a popula-
tion P of individuals that provoke longest execution
times and lowest accuracies.
Using the genetic algorithm, our test approach im-
proves a given test set to efficiently provoke worst-case
execution time and inaccurate results of the FGS algo-
rithm. If the test detects violations of the requirements,
the FGS algorithm has to be corrected and tested again.
5 EVALUATION
We have implemented our test approach to investigate
its efficiency for satellite on-board image processing
applications. As a case study, we used the FGS algo-
rithm of the PLATO mission.
Our objective is to evaluate our approach for the
development and test of the FGS algorithm implemen-
tation. Our goal is to test execution time and mathemat-
ical accuracy of the algorithm under realistic hardware
conditions. We run the FGS algorithm on a GR-XC6S
FPGA development board (PENDER ELECTRONIC
DESIGN GmbH, 2011) running at 50 MHz.
In our experiments we have used a complete test
set that covers all equivalence class combinations pre-
sented in (Witteck et al., 2019) as search space. Since
Gaussian-PSF stars are unrealistic, we eliminate them
from the test set. This reduces the amount of possible
star combinations to
1.6 × 10
46
. From this test set, our
test application selects star combinations and sends
picture sequences of 1000 times steps for each star
to the development board, where the FGS algorithm
calculates the attitude data. As a result, the test applica-
tion receives execution time and quality index for each
time step and averages them over all time steps. Based
on these values, our genetic algorithm calculates the
fitness value of the executed star combination.
Table 1: Genetic algorithm configuration.
Population size 20
Number of genes 30
Max execution time [ms] 300
a
time
[ms] 230
a
taste
1.5 × 10
−9
p
c
0.5
p
m
0.06
Maximum generation number 50
In our experiments we have used the configuration
specified in Table 1. We have taken the reference
values a
time
and a
taste
from previous experiments.
We have set the population size to 20 and the max-
imum generation number to 50 due to time reasons.
According to PLATO requirements the FGS execution
time shall not exceed
300 ms
. Thus, we have specified
that the genetic algorithm terminates if the execution
A Genetic Algorithm for Automated Test Generation for Satellite On-board Image Processing Applications
133
0 10 20 30 40
50
225
230
235
240
Generation number
Time [ms]
0 10 20 30 40
50
1.4
1.45
1.5
1.55
1.6
Generation number
Quality Index [10
−10
]
0 10 20 30 40
50
0.96
0.98
1
Generation number
Fitness Value
w
time
= 1 and w
taste
= 0
w
time
= 0 and w
taste
= 1
w
time
= 0.5 and w
taste
= 0.5
random
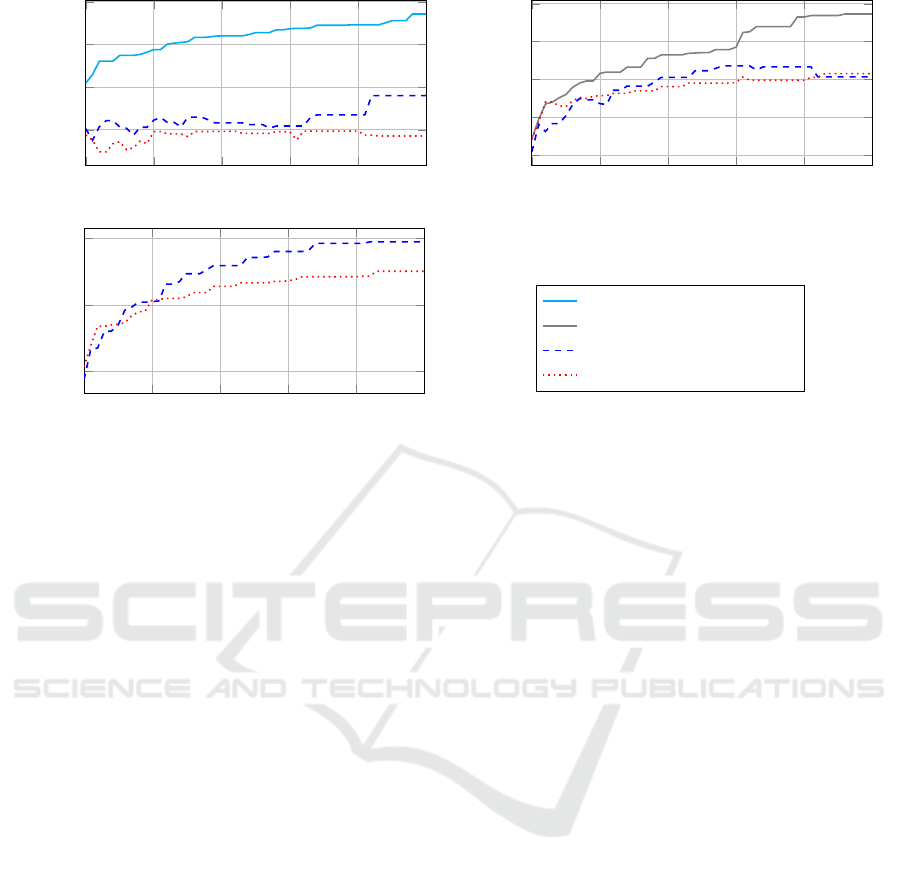
Figure 2: Experimental Results.
time for at least one test case exceeds this value. There
are no termination conditions with respect to the qual-
ity index as no PLATO requirement exists for this
measure. As genetic algorithms involve randomness,
due to randomly selecting the initial population or the
crossover and mutation process, we have performed
10 independent runs of each experiment and averages
the results.
In the first two experiments, our genetic algorithm
optimizes solutions for one fitness criteria: either ex-
ecution time or quality index. For that, we have set
the respective weighting factor
w
time
or
w
taste
to
1
and
the other to
0
. Thus, the calculated fitness value cor-
responds to the execution time or quality index re-
spectively. The fitness values of both experiments are
shown in Figure 2 by the solid lines. The upper left
part of Figure 2 presents the average of the highest
execution time per generation over 10 runs. The up-
per right part shows the average of the highest quality
index per generation over 10 runs.
To investigate the capability of our genetic algo-
rithm provoking a long execution time and a high qual-
ity index at the same time, we have set
w
time
and
w
taste
to 0.5 each. The corresponding execution time and
quality index are shown in the upper parts of Figure 2
by the dashed lines. As the figure shows, the execu-
tion times do not violate the timing requirement. The
execution time and quality index decreases in some
generations in favor of a lower accuracy or higher ex-
ecution time respectively. That is possible because
an individual with short execution time may be fitter
compared to another individual with longer execution
time, because of a much higher quality index.
The resulting evolution of the averaged fitness val-
ues per generation is shown in the lower part of Fig-
ure 2 by the dashed line. The fitness value increases un-
til the 42nd generation. The curve indicates that fitter
individuals would be found if the number of maximum
generations was increased. The selected configuration
parameters are based on previous tuning experiments
and need further research to achieve optimal results.
We have compared our experimental results with
random testing. For that, we have randomly selected
combinations of 30 stars from our complete test set.
Figure 2 shows the measured execution times, quality
index and fitness value of the random test by the dotted
lines. The results are averaged over 10 runs. We have
calculated the fitness values using our fitness func-
tion with
w
time
and
w
taste
equals 0.5. Each generation
corresponds to 20 random test cases.
Figure 2 shows, the maximum fitness value reached
by random testing is lower compared to the genetic
algorithm. Thus, our genetic algorithm is more capa-
ble to find a higher execution time and higher quality
index (i.e. lower accuracy) executing less test cases
compared to random testing.
Note that our genetic algorithm automatically pro-
vides test sets that have high execution times and qual-
ity indexes in a few generations. Hence, it improves
the efficiency of the software testing process. How-
ever, it will never examine all possible
1.6 × 10
46
star
combinations. Therefore, we can not rule out if there
are other combinations that provoke longer execution
times or higher quality indexes. But it increases the
ICSOFT 2020 - 15th International Conference on Software Technologies
134

confidence in the robustness of the satellite on-board
image processing application.
6 CONCLUSION
Due to complex computations performed by satellite
on-board image processing applications, it is difficult
to find test cases that provoke mission-critical behavior
in a potentially huge input domain. In this paper, we
have presented a genetic algorithm that is specifically
tailored to automatically find test cases that provoke
real-time critical behavior or scenarios where the math-
ematical accuracy gets critically low.
To achieve this, we have defined a novel two-
criteria fitness function that is based on execution
time and mathematical accuracy of a given satellite
on-board image processing application. Using that
function our genetic algorithm automatically steers
the search to test cases that provoke long execution
times or inaccurate results or both. The tester is able to
specify which criterion has more impact on the fitness
value of a test case. Moreover, the tester specifies the
input parameters of the genetic algorithm, for exam-
ple, population size, termination conditions, etc. This
makes our genetic algorithm flexible and adaptable to
different test goals and various on-board image pro-
cessing applications. Further, the search space and
individual representation are based on the partitioning
of input parameters into equivalence classes. Areas not
relevant to solutions are eliminated since redundant
test cases are removed. This makes our search faster.
To demonstrate the efficiency of our genetic ap-
proach, we have investigated the capability of the al-
gorithm to automatically find test cases that support
robustness testing of a given satellite on-board image
processing application, namely the FGS algorithm as
an application with high criticality for the PLATO
mission. In our experiments, our genetic algorithm
automatically evolves test cases with higher execution
times and lower mathematical accuracy of the FGS
algorithm compared to random testing.
In this paper, we have considered the TASTE value
as a qualitative measure of mathematical accuracy. To
investigate the accuracy of the application more pre-
cisely, we plan to additionally consider errors of the
results, for example, angle errors for each axis, as
criteria for the mathematical accuracy. Furthermore,
we have evaluated our approach by means of a single
satellite on-board image processing application. Due
to the flexibility of our approach the suitability for
other application, for example, blob feature extraction
in the robotics domain, can be investigated.
REFERENCES
Alander, J. T. and Mantere, T. (1999). Automatic soft-
ware testing by genetic algorithm optimization, a case
study. In Proceedings of the 1st International Work-
shop on Soft Computing Applied to Software Engineer-
ing, pages 1–9.
Bhandari, D., Murthy, C., and Pal, S. K. (2012). Variance as
a stopping criterion for genetic algorithms with elitist
model. Fundamenta Informaticae, 120(2):145–164.
Gerdes, I., Klawonn, F., and Kruse, R. (2004). Evolution
¨
are
Algorithmen: Genetische Algorithmen - Strategien
und Optimierungsverfahren - Beispielanwendungen.
vieweg, 1 edition.
Griebach, D. (2020). Fine Guidance System Performance
Report. Technical Report PLATO-DLR-PL-RP-0003,
DLR.
H
¨
ansel, J., Rose, D., Herber, P., and Glesner, S. (2011).
An evolutionary algorithm for the generation of timed
test traces for embedded real-time systems. In Interna-
tional Conference on Software Testing, Verification and
Validation (ICST), pages 170–179. IEEE Computer So-
ciety.
Moheb R. Girgis (2005). Automatic test data generation for
data flow testing using a genetic algorithm. Journal of
Universal Computer Science, 11(6):898–915.
PENDER ELECTRONIC DESIGN GmbH (2011). Gr-xc6s-
product sheet.
Pertenais, M. (2019). Instrument Technical Requirement
Document. Technical Report PLATO-DLR-PL-RS-
0001, DLR.
Sharma, A., Patani, R., and Aggarwal, A. (2016). Software
testing using genetic algorithms. International Journal
of Computer Science & Engineering Survey, 7(2):21–
33.
Shuster, M. D. (2008). The taste test. Advances in the
Astronautical Sciences, 132.
Sthamer, H., Baresel, A., and Wegener, J. (2001). Evolution-
ary testing of embedded systems. Proceedings of the
14th International Internet & Software Quality Week
(QW01), pages 1–34.
Varshney, S. and Mehrotra, M. (2014). Automated software
test data generation for data flow dependencies using
genetic algorithm. International Journal, 4(2).
Wegener, J. and Mueller, F. (2001). A comparison of static
analysis and evolutionary testing for the verification of
timing constraints. Real-time systems, 21(3):241–268.
Witteck, U. (2018). Automated Test Generation for Satel-
lite On-Board Image Processing. Master’s thesis, TU
Berlin.
Witteck, U., Grießbach, D., and Herber, P. (2019). Test
Input Partitioning for Automated Testing of Satellite
On-board Image Processing Algorithms. In Proceed-
ings of the 14th International Conference on Software
Technologies - Volume 1: ICSOFT, pages 15–26. IN-
STICC, SciTePress.
A Genetic Algorithm for Automated Test Generation for Satellite On-board Image Processing Applications
135
