
BRAIN-IoT: Paving the Way for Next-Generation Internet of Things
Enrico Ferrera
1
, Xu Tao
1
, Davide Conzon
1
, Victor Sonora Pombo
2
, Miquel Cantero
3
, Tim Ward
4
,
Ilaria Bosi
1
and Mirko Sandretto
1
1
LINKS Foundation – Leading Innovation & Knowledge for Society, Turin, Italy
2
Improving Metrics, A Coruña, Spain
3
Robotnik Automation S.L.L., Valencia, Spain
4
Paremus Ltd, Wokingham, U.K.
victorsp@improvingmetrics.com, mcantero@robotnik.es, tim.ward@paremus.com
Keywords: Next-Generation Internet of Things, Self-aware Systems, Semi-autonomous Systems, Security, Privacy,
Edge Computing, Model-based Development, Smart Behaviours.
Abstract: Nowadays, the adoption of the Internet of Things is drastically increasing in different domains and is
contributing to the fast digitalization of several different critical sectors. In the near future, next generation of
IoT-based systems will become more complex to be designed and managed. An opportunity for the
development of flexible smart IoT-based systems that drive the business decision-making is to take more
precise and accurate decisions at the right time, collecting real-time IoT generated data. This involves a set of
challenges including the complexity of IoT-based systems and the management of large-scale systems
scalability. With respect to these challenges, we propose to automate the management of IoT-based systems
mainly based on an autonomic computing approach; these systems should implement cognitive capabilities
that allow them learning and generating decisions at the right time. Consequently, we propose a model-driven
methodology for designing smart IoT-based systems. With this objective, BRAIN-IoT paves the way to
develop and demonstrate novel IoT concepts and solutions to underpin the Next Generation Internet of Things
vision and architecture, that focusing on self-aware and semi-autonomous IoT systems, as well as on moving
away from centralized cloud-computing solutions towards distributed intelligent edge computing systems.
1 INTRODUCTION
Nowadays, the adoption of the Internet of Things
(IoT) is drastically increasing in every application
domain, contributing to the fast digitalization of
contemporary society. Current IoT scenarios are
demonstrating to be constantly increasing in terms of
demanding non-functional requirements, from low
latency to high reliability, and dynamic resources
allocation. This paradigm shift, also considered as the
next evolution phase of IoT (Fettweis, 2014), is
expected to create numerous opportunities for
technology market supporting applications such as
critical infrastructures management, and cooperative
service robotics.
To cope with these demanding requirements, a
multitude of novel technologies - such as Edge
Computing, Artificial Intelligence and Analytics,
Digital Twin, as well as Security, Privacy and Trust
schemes – are being investigated in order to be
adopted in current IoT architectures standards
(Vermesan & Bacquet, 2019), identifying efficient
integration schemes with proper design patterns.
Henceforth, next generation of IoT-based systems are
set to become more complex to design and manage.
Nonetheless, a set of challenges including the
complexity of IoT systems in domains like Smart
Factories and Smart Cities and the management of the
possibly conflicting requirements, interoperability
among distributed heterogeneous technologies and
data, as well as system scalability, requires an
evolving software eco-system which can adapt,
change and scale in response to local requirements
and environmental changes to drive efficiently the
business decision-making. Also, the distributed
nature of IoT makes enforcement of good security
practices intrinsically challenging. The market asks
for IoT solutions suitable to safely support business-
critical tasks, which can be deployed rapidly and with
low costs. Modern IoT applications operating in
470
Ferrera, E., Tao, X., Conzon, D., Pombo, V., Cantero, M., Ward, T., Bosi, I. and Sandretto, M.
BRAIN-IoT: Paving the Way for Next-Generation Internet of Things.
DOI: 10.5220/0009818504700477
In Proceedings of the 5th Inter national Conference on Internet of Things, Big Data and Security (IoTBDS 2020), pages 470-477
ISBN: 978-989-758-426-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

different scenarios, such as Smart Cities, Industry 4.0,
etc., are complex software ecosystems with strict
requirements of geographic distribution, scalability,
heterogeneity, dynamic evolution, security and
privacy protection, highly more challenging than the
ones required by the traditional (e.g. domotics)
environments. Two of the main challenges arising in
the current Internet of Things scenarios, on one side,
the requirement of designing applications involving
several heterogeneous platforms and smart Things
interconnected to each other in the same environment
and, on the other side, the need to be able to
instantiate, operate and evolve the complex software
ecosystem, reacting automatically and at runtime to
environmental changes, without the human
intervention. With respect to these challenges, which
relates to the complexity of IoT systems management,
the authors propose to automate the management of
IoT systems based on an autonomic computing
approach. However, autonomic computing alone is
not enough for the development of smart IoT-based
systems. Indeed, these systems should implement
cognitive capabilities that allow them learning and
generating decisions at the right time (Kephart &
Chess, 2003). Consequently, we propose a model-
driven methodology for designing smart IoT systems.
With this objective, the BRAIN-IoT project (Brain-
IoT, 2018), funded by the European Commission,
paves the way to develop and demonstrate novel IoT
concepts and solutions to underpin the Next
Generation Internet of Things (NGIoT) vision, which
requires the definition of next generation IoT
architectures focusing on self-aware and semi-
autonomous IoT systems, as well as the migration
from centralized cloud-computing solutions towards
distributed intelligent edge computing systems
(Ferrera, et al., 2018).
While EU-based initiatives are devoting
significant amount of effort to tackle such issues,
often with very positive results, efficient solutions
suitable to tackle challenges arising in NGIoT
scenarios are still missing (NGIoT, 2019). Future
critical issues may be hiding under the hood already
now and be ready to appear in the close future. To be
economically sustainable and achieve solution
longevity, a flexible and dynamic self-managed
system is needed.
The rest of the paper is organized as follows:
Section 2 provides an overview of the background on
autonomic computing and current state of the art of
the application of MAPE loop approach in IoT
domain. Section 3 introduces the BRAIN-IoT
Platform architecture starting from a general,
functional, overview and continuing with objectives
to be accomplished and design choices. Section 4
presents the Service Robotics use-case scenario
where the Platform has been applied and tested.
Finally, Section 5 and Section 6 draw conclusions and
discuss future works to be carried in the next phase of
the project.
2 BACKGROUND AND RELATED
WORKS
One of the most important challenges in self-
adaptation is to create the ability in the system to
reason about itself and its context (Abeywickrama &
Zambonelli, 2012) (Renart, Balouek-Thomert, &
Parashar, 2017).
An autonomic system is composed of many self-
managed components that interact with each other
autonomously, giving some kind of decision-making
mechanism, such as policies, from administrators
(Bueno, 2012). The self-management system must be
continuously monitoring itself to be aware of changes
in the system that might require either reconfiguration
or optimization of the components, protecting itself
against suspected wrong behaviour or recovering
from failures (Villegas & Müller, 2011): BRAIN-IoT
focuses on these last two aspects. Adaptation refers to
the capability of changing the software structure or
behaviour according to significant alterations in the
environment. This adaptation must occur
dynamically and at runtime.
The MAPE loop (Monitor, Analyzer, Planner, and
Executer) (Lee, Seo, & Kim, 2019) is a crucial
feedback for the implementation loop of self-adaptive
software and autonomic computing. These four parts
communicate and collaborate to each other and
exchange appropriate knowledge and information.
The Monitor collects the information from the
software and its environment, the Analyzer observes
the reported situation and determines if any change
needs to be made, the Planner creates the plan to
achieve the changes, and the Executer provides the
mechanism to perform the changes over the managed
system. Various decentralized MAPE loop patterns
have been studied for self-adaptive software such as
coordinated control, information sharing, master–
slave, regional planning, and hierarchical control.
The following paragraph will report the various
IoT studies conducted on self-adaptive software, with
a focus on its application in distributed systems and
IoT domain. One of the first approaches related to a
self-adaptive distributed decision support model is
proposed by Zhang (Zhang, Alharbe, & Atkins, 2016)
BRAIN-IoT: Paving the Way for Next-Generation Internet of Things
471
with a simulated inventory management system for a
warehousing company. Ouechtati (Ouechtati,
Azzouna, & Said, 2018) presented a middleware for
IoT, which can adapt process of access control rules
that satisfy the requirements of IoT environments. A
designed MAPE loop-based management
architecture patterns for an adaptation system in IoT
environments was designed by Ribeiro (Ribeiro, de
Almeida, Moreno, & Montesco, 2016). Muccini
(Muccini, Spalazzese, Moghaddam, & Sharaf, 2018)
surveyed IoT distribution patterns and self-
adaptation, and simulated with an IoT-based forest
monitoring system based on the MAPE loop. In the
health area (Azimi, et al., 2017) presented a MAPE
loop with shared knowledge (MAPE-K) based on
hierarchical computing architecture (HiCH) for IoT-
based health monitoring systems. Welsh (Welsh,
Bencomo, Sawyer, & Whittle, 2014) implemented a
self-adaptive system with goal-based requirement
models to ensure self-explanation behaviours at
runtime. In order to simplify the engineering and
coordination of services in dynamic IoT
environments in (Beal, Pianini, & Viroli, 2015) the
aggregate programming (focuses on ensuring the
simplified design, creation, and maintenance of IoT
systems) was employed and then demonstrated in the
Alchemist simulation (Pianini, Montagna, & Viroli,
2013), which is an extensible meta simulator for
pervasive computing. In (Bucchiarone, Marconi,
Pistore, & Raik, 2017) was promoted a framework
with runtime service composition in a dynamic
context, using a service model with stateful, non-
deterministic, and asynchronous features. Renart
(Renart, Diaz-Montes, & Parashar, 2017) proposed a
framework to support dynamic data driven IoT
applications called Pulsar, that leverages edge
resources to support location and content aware
processing of data streams. Also, a self-adaptive
framework for reliable multiple autonomic loops was
proposed by (Sylla, Louvel, Rutten, & Delaval,
2017).
Furthermore, a new challenge related on self-
adaptive software concerns the complexity that arises
from the wealth of information that can be associated
with runtime phenomena. Trying to extend the
applicability of models produced in Model-Driven
Engineering (MDE) approaches to the runtime
environment, the research on models@runtime
focuses on providing effective technologies for
managing the complexity of evolving software
behaviour while it is executing (Bencomo, Götz, &
Song, 2019). A models@runtime is a causally
connected self-representation of the associated
system, so it is possible to use these to support
dynamic state monitoring and control of systems
during execution (runtime behaviour observation), to
support design errors fixing or even controlled
ongoing design. In other words, in order to monitor
and validate the correct execution of the platform,
models@runtime could provide a real-time picture of
the status of the system, synchronizing its internal
status with its model (Blair, Bencomo, & France,
2009). This guarantees the system operators to
constantly have a clear view of the situation, checking
whether the system is behaving as expected, and
giving the possibility to promptly react in case of
design issues.
3 BRAIN-IoT PLATFORM
3.1 Overview
In this paper, the authors focus on IoT environments
consisting of different sensors, actuators, external
services, and requirements that should be
dynamically satisfied at runtime. To achieve this, a
self-adaptive software framework is proposed for an
IoT environment with two phases: Modelling &
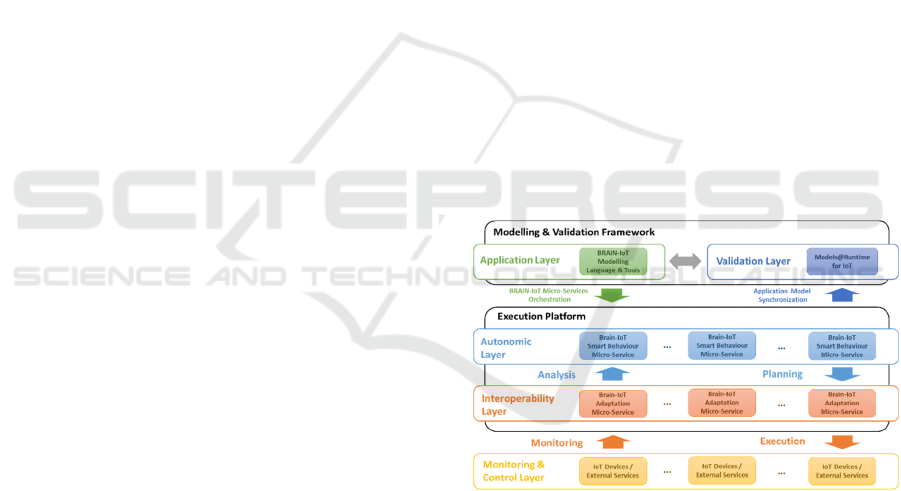
Validation, and Execution. In Figure 1, presents an
overview of the proposed platform.
Figure 1: Overview of BRAIN-IoT Platform.
The Modelling & Validation Framework is
responsible for designing the logic of the Application
which is going to be constructed based on the actions
and relations between the available devices (i.e.
sensors, actuators, Cyber-Physical Systems - CPSs)
and external services (e.g. weather forecast, open
data, third-party IoT platforms, databases). The
Application logic is modelled along with the relevant
IoT environment as a Finite-State Machine (FSM)
describing its self-adaptive behaviour. Finally, the
abstracted FSM is converted in source code which is
deployed and executed by the Execution Platform.
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
472

The Execution Platform implements a MAPE
loop, which make the Platform dynamic for runtime
adaptation. Leveraging on a library of deployable
microservices, the Execution Platform allows the
instantiation of an Interoperability Layer and an
Autonomic Layer. The Interoperability Layer is
composed by the set of microservices which are
responsible for the communication and semantic
adaptation to the available IoT Devices and/or
External Services, hence performing the Monitoring
of the environment and collection of data, and
Execution of specific actions to implement the
decision taken from the Autonomic Layer. The
Autonomic Layer is composed by the set of Smart
Behaviours microservices which are responsible for
Analysing data and consequently Planning the set of
actions for satisfying the requirements of the
modelled application logic. The Modelling &
Validation Framework offers the ability to use
development-time models to supervise running
Execution Platform states. This solution enables
monitoring of microservices states and starting and
stopping them from the Modelling & Validation
Framework. BRAIN-IoT Platform is also able to use
models@runtime to modify the system’s behavior at
runtime in response to changes within the system.
3.2 Objectives
To address the challenges outlined in Section 1,
BRAIN-IoT platform aims to support IoT
professionals to reducing the effort for designing,
developing, deploy, configure, optimize, and
maintain IoT Systems based on existing and new IoT
Services. BRAIN-IoT simplify the process of
implementing and deploying code into production,
i.e. scaling, capacity planning and maintenance
operations may be hidden from the developer or
operator. To pursue this ambition, BRAIN-IoT aims
to achieve the following four macro-objectives,
focusing on two sub-objectives each.
I. Facilitates the specification and design of
complex IoT systems.
A. Defining a Domain-Specific Modelling
Language for IoT and CPS service composition
enabling the creation of mashups of existing and
new IoT services communicating with different
protocols.
B. Specifying the data-flow mappings
between the different IoT service interfaces in a
seamless way, as well as the behaviour logic
implementing the orchestration of such services.
II. Enabling self-adaptive deployment and
management of distributed IoT systems.
A. Developing a dynamic Cloud/Edge runtime
infrastructure which simplifies and automates the
process of deploying and managing distributed
IoT applications, allowing the automatic
installation and replacement of smart behaviours,
as well as semantic and syntactic adapters for IoT
Devices and Services, reacting to environmental
changes and User events.
B. Adopting advanced self-learning features,
realized by means of modular Artificial
Intelligence algorithms, which can recognize non-
critical and critical events (such as data stream
anomalies) to trigger the reconfiguration (such as
new behaviors deployment, self-healing
capabilities, etc.) of the runtime infrastructure.
III. Enforcing Security and Privacy.
A. Establishing Authentication, Authorization
and Accounting (AAA) in dynamic, distributed
IoT scenarios.
B. Providing solutions to embed privacy-
awareness and privacy control features in IoT
solutions.
IV. Complex IoT systems validation and safety
enforcement.
A. Developing IoT devices models for
evaluating the system in a safe environment
before executing it in the real environment.
B. Fast prototyping and supervising of critical
running systems, via real-time models, to validate
them before instantiating in the real environment.
3.3 Architecture
To achieve its objectives, BRAIN-IoT project
develops a Platform which consists of four main
technological categories:
Modelling & Validation Framework. Defines a
domain-specific Modelling Language describing IoT
devices capabilities and system-level behaviours;
provides toolset supporting the syntax of the
modelling language, allowing model verification and
model checking, and automatic code generation to
provide rapid model-based development approach.
Execution platform. Provides an autonomic
distributed infrastructure for the dynamic deployment
and execution of smart behaviours and IoT devices
and external services adapters.
Security & Privacy Framework. Provides security
and privacy awareness and protection throughout the
BRAIN-IoT platform, including end-to-end security
service.
BRAIN-IoT: Paving the Way for Next-Generation Internet of Things
473
Smart Behaviours. Enable autonomic
functionalities for the Runtime Infrastructure through
the deployment and execution of reusable software
AI/ML algorithms.
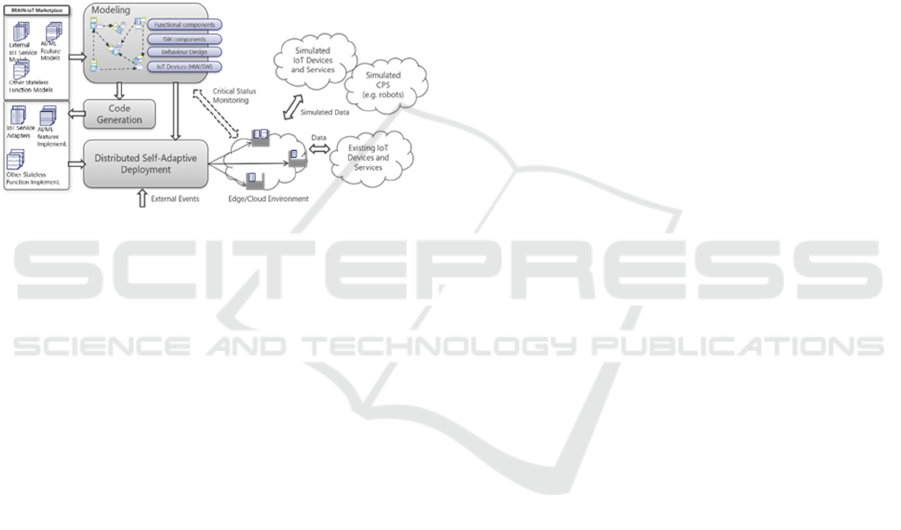
The four technological categories are made of
several software components, or “Products”, which
compose the overall BRAIN-IoT Platform, as
represented in
Figure
2.
In BRAIN-IoT Modelling & Validation
Framework a new meta-language, namely the
BRAIN-IoT Modelling Language (BRAIN-IoT-ML)
is defined. BRAIN-IoT-ML is a UML profile, which
extends the generic UML for the IoT domain.
BRAIN-IoT-ML implements the concepts in the IoT-
A (De Loof, et al., 2013) domain model.
Figure 2: BRAIN-IoT Platform Architecture.
BRAIN-IoT-ML modelling approach is
component-based and behaviours are described as
state-machines. As a UML profile, BRAIN-IoT-ML
integrates well with other UML profiles, e.g.,
MARTE, SysML, and AI Module profiles to be
developed within the project.
IoT-ML aims at proposing a system-level
description of functional models. The goal is to add
IoT domain concepts in this kind of model, at this
level of abstraction. AI concepts shall also
complement the IoT models and allow syntactical and
semantical compatibility analysis between AI
modules.
BRAIN-IoT-ML and AI Module Modelling
Language have a dedicated modelling tool to apply
Model-Based Engineering. BRAIN-IoT-ML
modelling tool uses a Model-Based Engineering
(MBE) approach to help component-based
modelling, facilitating the linking toward real devices
and external services through meta-data
representation in WoT TD (W3C, 2020), monitor IoT
state-machine based behaviours in a human-friendly
graphical manner through the models@runtime
approach, and finally quickly prototyping before
deployment in the real context to check the goodness
of the designed state machine – leveraging on the
human friendly graphical monitoring of the state
machine itself, by generating the source code for
monitoring and controlling the BRAIN-IoT
adaptation microservices. The tool also validates
syntactical and semantic compatibility between AI
modules assembled together.
Since the goal of BRAIN-IoT Platform is not to
re-implement yet another IoT middleware but to
facilitate the management of complex IoT systems,
the BRAIN-IoT adaptation microservices have not
been implemented from scratch; counterwise a
mature existing IoT platform such as Eclipse
sensiNact (Eclipse, 2020) has been integrated to cope
with the interoperability issues.
Eclipse sensiNact consists of a software platform
enabling the collection, processing and redistribution
of any data relevant to improving the quality of life of
urban citizens, programming interfaces allowing
different modes of access to data (on-demand,
periodic, historic, etc.). Eclipse sensiNact IoT
devices, legacy systems, mobile applications, open
data repositories are the potential exploitable data
sources: sensiNact provides connectivity support to
those data sources including IoT protocols and
platforms such as LoRa, Zigbee, IEEE 802.15.4,
Sigfox, enOcean, MQTT, XMPP, NGSI, HTTP,
CoAP, etc.
The fully modular BRAIN-IoT Execution
Platform is designed not only to be autonomous in its
own right, in that it will be entirely self-managing,
and self-healing but also it will facilitate the
deployment of autonomous microservices,
irrespective of the functionality of that microservice.
Microservices have the capability of dynamic
deployment throughout the framework. In a use case
with variable and unpredictable numbers and
locations of active end devices, this ability is not
available today. Any new edge device on the
framework, irrespective of location, will be able to
dynamically load microservices as required, given the
appropriate security permissions (Nicholson, et al.,
2019). Similarly, reconfiguration of the
microservices will be possible whenever needed. The
current state of the art requires that the overall system
or application is stopped, a configuration pushed out
to the edge devices and the system is then restarted.
The BRAIN-IoT Platform will permit dynamic, “on
the fly” reconfiguration and upgrade without
necessarily halting the total system. Due to the
modularity of the framework and its components,
microservices available to the framework can be
reused or repurposed for other applications with
minimal effort, cutting down both the cost and
implementation time of new applications.
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
474

Along with the support of Smart Behaviours
functionalities, implemented as AI/ML algorithms,
the BRAIN-IoT Platform includes the ability for
designed applications running on the platform to self-
optimise. This is achieved by embedding the ability
to monitor the surrounding environment and the
operating context via specific adaptation
microservices, and then to make analysis and
planning with machine learning (ML) to determine
the best possible configuration of microservices for
achieving the application objectives and
requirements. Autonomous dynamic deployment
built into the BRAIN-IoT Platform means that
microservices can, if deemed appropriate by such an
intelligent management agent, be relocated within the
available infrastructure. This totally autonomous
capability within the BRAIN-IoT Platform represents
a significant advance on current state of the art in IoT
implementations, paving the way for the Next-
Generation IoT paradigm.
4 SERVICE ROBOTICS CASE
STUDY
The overall depicted concept draws requirements and
challenging use cases from IoT applications in a
Service Robotics usage scenarios, which provide the
suitable setting to reflect future challenges in terms of
dependability, need for smart behaviour, and security,
which are expected to become more significant and
impacting in the long-term (10+years).
The Service Robotics use-case involves several
robotic platforms, like the open-source Robotics
Operating System (ROS), which need to collaborate
to scan a given warehouse and to assist humans in a
logistics domain.
The use-case identified for testing the BRAIN-
IoT Platform consists in five robots moving
autonomously within the warehouse, with the goal of
picking carts from a loading area and moving them to
an unloading area. While performing this task,
modelled via BRAIN-IoT-ML and deployed as
software artefacts onto the different robots, the robots
may run into several issues, such as system failures,
battery depletion or cyber-attacks.
The role of BRAIN-IoT Platform is to enforce a
self-healing behaviour which will guarantee the
system to accomplish the full execution of the task.
This is achieved implementing a reusable and generic
component that intends to abstract the
implementation of anomaly detection of a specific
problem to generalize it to problems of the same type.
Aims to identify the anomalies over several data
sources, that can be due to a change in the behaviour
of the sensor, a failure or a miscalibration. It is
necessary to specify the main data sources where the
detection of anomalies shall be done and a set of co-
variables, if any. The Communication between
adaptation microservices – gathering data from data
sources – and such Smart Behaviour microservice is
implemented through the BRAIN-IoT Event Bus. The
Brain IoT Event Bus is a lightweight, asynchronous
eventing system designed to allow communication
between decoupled resources and software
components. It provides type safe access to data, and
basic schema transformation. This allows
components to interact even if their data schema is not
known until compile time.
The event bus is also responsible for interacting
with various security components to validate the
integrity and origin of data as it flows through the
system. This includes the use of the authorisation
engine to limit the sending and delivery of event data.
An analysis of the input data is carried out. It
attempts to identify the main characteristics of each
of the data sources and the correlation between the
different sources. According to the analysis, the
variables to be modelled are selected and a set of
complementary methods is executed, which by
different techniques, extract different types of
anomalies. This anomaly detection is translated in an
event which triggers the instantiation of the same
logic to a new robotic platform which was not part of
the original set of robots and can substitute the robots
which presents the detected anomaly. The Execution
Platform provides automated distributed management
of microservices placement, based upon the concept
of “unhandled events” and the BRAIN-IoT artefact
repository. Microservices and behaviours are
dynamically “resolved” by a Behaviour Management
Service, implemented within the Execution Platform,
on the target node to validate that their dependencies
can be satisfied, and that the node is capable of
running them. Such Behaviour Management Service
takes the role of an OSGi Management Agent (a role
identified, but not specified, by the OSGi Alliance)
and is responsible for the deployment and
management of OSGi bundles and configurations in
the runtime. As such it makes use of related OSGi
specifications such as the Resolver Service and the
OSGi Repository Service. The concepts used by the
Behaviour Management Service are relatively
common in OSGi, although the use of the resolver
service to determine deployments at runtime is used
less frequently. The primary innovation is the use of
live event data from the event bus to dynamically
BRAIN-IoT: Paving the Way for Next-Generation Internet of Things
475

trigger the installation of microservices and
behaviours.
5 CONCLUSIONS
This paper has presented the BRAIN-IoT platform,
explaining how this solution paves the way for the
development and demonstration of novel IoT
concepts and solutions, supporting the Next
Generation Internet of Things vision. In the next
years, such vision, will require the introduction of
next generation IoT architectures able to
autonomously react to system issues and adopt self-
healing and self-protection techniques to guarantee
the reliability and service continuity of complex
distributed IoT systems.
The BRAIN-IoT project provides a platform that
aims to be considered as a reference solution for the
development of applications involving autonomic
computing and distributed IoT systems. The solution
will provide both a Modelling and Validation
Framework that allow designing applications using a
modern model-based design approach and an
Execution Platform, which implements a MAPE
loop. The main features provided by this platform in
terms of dynamicity and self-* capabilities are
possible thanks to the use of the OSGi-based
technologies and more specifically the Requirements
and Capabilities specification, which allows to handle
the autonomous dynamicity of the platform as an
automatic dependencies matchmaking. Leveraging
such technology, the BRAIN-IoT delivers a software
eco-system capable of deploying/assembling,
orchestrating and managing sophisticated IoT
applications. Conceptually, like, but significantly
more flexible than, compute lambdas; BRAIN-IoT
demonstrates how sophisticated distributed
behavioural pipelines of software components can be
dynamically assembled, in response to environmental
triggers. Meanwhile, by pursuing a modular structural
hierarchy (i.e., an holonic approach), BRAIN-IoT
enables the natural creation of federated distributed
environments ideally suited to the demands of several
domains of the modern society.
6 FUTURE WORKS
The BRAIN-IoT project use cases demonstrate the
flexibility of the proposed approach within a diverse
set of operational environments. Specifically, this
paper has focused on the Service Robotics use case,
which demonstrates the use of BRAIN-IoT platform
in a highly automated, dynamic and adaptive
manufacturing environment. Furthermore, the same
approach will be applied also in the second use case
concerning the monitoring and control of public water
management infrastructure for the city of A Coruna,
which will demonstrate the use of BRAIN-IoT in
critical infrastructures and mission-critical
environments.
Finally, during the final phase of the BRAIN-IoT
project, key BRAIN-IoT concepts will be finalized
with regards with their OSGi Alliance specification
process (OSGi Github, 2019).
ACKNOWLEDGEMENTS
This work was supported by the project “BRAIN-
IoT” (H2020-IOT-03-2017, grant agreement no.
780089).
REFERENCES
Abeywickrama, D. B., & Zambonelli, F. (2012, April).
Model checking goal-oriented requirements for self-
adaptive systems. IEEE 19th International Conference
and Workshops on Engineering of Computer-Based
Systems, pp. (pp. 33-42).
Azimi, I., Anzanpour, A., Rahmani, A. M., Pahikkala, T.,
Levorato, M., Liljeberg, P., & Dutt, N. (2017). HiCH:
Hierarchical fog-assisted computing architecture for
healthcare IoT. ACM Transactions on Embedded
Computing Systems (TECS), pp. 16(5s), 1-20.
Beal, J., Pianini, D., & Viroli, M. (2015). Aggregate
programming for the internet of things. Computer, pp.
48(9), 22-30.
Bencomo, N., Götz, S., & Song, H. (2019). Models@ run.
time: a guided tour of the state of the art and research
challenges. Software & Systems Modeling, pp. 18(5),
3049-3082.
Blair, G., Bencomo, N., & France, R. B. (2009). Models@
run. time. Computer, pp. 42(10), 22-27.
Brain-IoT. (2018). [Online]: http://www.brain-iot.eu/
Bucchiarone, A., Marconi, A., Pistore, M., & Raik, H.
(2017). A context-aware framework for dynamic
composition of process fragments in the internet of
services. ournal of Internet Services and Applications,
pp. 8(1), 6.
Bueno, L. C. (2012). A Reference Architecture for
Component-Based Self-Adaptive Software Systems.
Department of Information and Communication
Technologies Faculty of Engineering, ICESI
University, Cali, Columbia.
De Loof, J., SAP, C. M., Meissner, S., Nettsträter, A., CEA,
A. O., SAP, M. T., & Walewski, J. W. (2013). Internet
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
476

of Things–Architecture IoT-A Deliverable D1. 5–Final
architectural reference model for the IoT v3. 0.
Eclipse. (2020). [Online]: https://projects.eclipse.org/
proposals/eclipse-sensinact
Ferrera, E., Pastrone, C., Brun, P. E., De Besombes, R.,
Loupos, K., K. G., & Mygiakis, A. (2018). IoT
European Security and Privacy Projects: Integration,
Architectures and Interoperability. Next Generation
Internet of Things. Distributed Intelligence at the Edge
and Human Machine-to-Machine Cooperation.
Fettweis, G. P. (2014). The tactile internet: Applications
and challenges. IEEE Vehicular Technology Magazine,
9(1), 64-70.
Kephart, J. O., & Chess, D. M. (2003). The vision of
autonomic computing. Computer, 36(1), 41-50.
Lee, E., Seo, Y. D., & Kim, Y. G. (2019). Self-Adaptive
Framework Based on MAPE Loop for Internet of
Things. Sensors, 19(13), 2996.
Muccini, H., Spalazzese, R., Moghaddam, M. T., & Sharaf,
M. (2018, September). Self-adaptive IoT architectures:
An emergency handling case study. In Proceedings of
the 12th European Conference on Software
Architecture: Companion Proceedings, pp. (pp. 1-6).
NGIoT, N. G. (2019). Building a Roadmap for the Next
Generation Internet of Things – Research, Innovation
and Implementation 2021-2027. [Online]:
https://ngiot.eu/wp-content/uploads/sites/26/2019/09/
NGIoT_scoping-paper.pdf
Nicholson, R., Ward, T., Baum, D., Tao, X., Conzon, D., &
Ferrera, E. (2019, July). Dynamic fog computing
platform for event-driven deployment and orchestration
of distributed Internet of Things applications. Third
World Conference on Smart Trends in Systems Security
and Sustainablity (WorldS4), pp. (pp. 239-246). IEEE.
OSGi Github. (2019). [Online]: https://github.com/osgi/
design/blob/master/rfcs/rfc0244/rfc-0244-Type-Safe-
Events.pdf
Ouechtati, H., Azzouna, N. B., & Said, L. B. (2018,
January). Towards a self-adaptive access control
middleware for the Internet of Things. In 2018
International Conference on Information Networking
(ICOIN), pp. (pp. 545-550). IEEE.
Pianini, D., Montagna, S., & Viroli, M. (2013). Chemical-
oriented simulation of computational systems with
Alchemist. Journal of Simulation, pp. 7(3), 202-215.
Renart, E. G., Diaz-Montes, J., & Parashar, M. (2017,
May). Data-driven stream processing at the edge. In
2017 IEEE 1st International Conference on Fog and
Edge Computing (ICFEC), pp. (pp. 31-40). IEEE.
Renart, E., Balouek-Thomert, D., & Parashar, M. (2017,
September). Pulsar: Enabling dynamic data-driven IoT
applications. IEEE 2nd International Workshops on
Foundations and Applications of Self* Systems (FAS*
W) , pp. (pp. 357-359).
Ribeiro, A. D., de Almeida, F. M., Moreno, E. D., &
Montesco, C. A. (2016, September). A management
architectural pattern for adaptation system in Internet of
Things. In 2016 International Wireless
Communications and Mobile Computing Conference
(IWCMC), pp. (pp. 576-581). IEEE.
Sylla, A. N., Louvel, M., Rutten, E., & Delaval, G. (2017,
September). Design framework for reliable multiple
autonomic loops in smart environments. In 2017
International Conference on Cloud and Autonomic
Computing (ICCAC), pp. (pp. 131-142). IEEE.
Vermesan, O., & Bacquet, J. (. (2019). Next generation
Internet of Things: Distributed intelligence at the edge
and human machine-to-machine cooperation. River
Publishers.
Villegas, N. M., & Müller, H. A. (2011). Context-driven
adaptive monitoring for supporting SOA governance.
CMU/SEI-2011-SR-008. Pittsburgh: Carnegie Mellon
University.
W3C. (2020). [Online]: https://www.w3.org/TR/wot-thing-
description/
Welsh, K., Bencomo, N., Sawyer, P., & Whittle, J. (2014).
Self-explanation in adaptive systems based on runtime
goal-based models. In Transactions on Computational
Collective Intelligence XVI, pp. (pp. 122-145).
Springer, Berlin, Heidelberg.
Zhang, L., Alharbe, N., & Atkins, A. S. (2016, December).
An IoT application for inventory management with a
self-adaptive decision model. IEEE International
Conference on Internet of Things (iThings) and IEEE
Green Computing and Communications (GreenCom)
and IEEE Cyber, Physical and Social Computing
(CPSCom) and IEEE Smart Data (SmartData), pp. (pp.
317-322). IEEE.
BRAIN-IoT: Paving the Way for Next-Generation Internet of Things
477
