
Scale Drone Mapping on K8S: Auto-scale Drone Imagery Processing on
Kubernetes-orchestrated On-premise Cloud-computing Platform
Hemang Narendra Vithlani
1 a
, Marcel Dogotari
1
, Olee Hoi Ying Lam
1
, Moritz Pr
¨
um
1
,
Bethany Melville
2
, Frank Zimmer
1
and Rolf Becker
1
1
Faculty of Communication and Environment, Rhine-Waal University of Applied Sciences, 47475 Kamp-Lintfort, Germany
2
Astron Environmental Services, 129 Royal Street, East Perth Western Australia, 6004, Australia
Keywords:
Drone Imagery, Opendronemap, Photogrammetry, Open-source, Kubernetes, Cloud Computing.
Abstract:
Aerial images acquired using drone-based imaging sensors can be processed by photogrammetry toolkits
to create geometrically corrected 2D orthophoto and/or 3D models. This is a crucial step for many of the
ever-evolving civil applications of drones such as precision agriculture and surveying. Nevertheless, limited
computational resources become bottleneck in providing these results quickly. Cloud computing helps in
such scenarios because of its value-added features, namely virtualization, elasticity, high performance and
distributed computing for the web-based image processing. The containerization approach plays a vital role
in cloud computing by providing operational efficiency. Container orchestration engine, Kubernetes, not only
provides template-based or GUI-based service deployment but also better monitoring, log querying and auto-
scaling. The present work displays a scalable photogrammetry service, deployed on a Kubernetes-orchestrated
on-premise cluster. This reference implementation on Kubernetes enables the parallel processing of large
datasets in less time than a single computer using the free and open-source toolkit OpenDroneMap.
1 INTRODUCTION
Throughout the last decade, an acceleration in the
demand for computing resources and the availabil-
ity of low-cost, interconnected computers have led
to a valuable increase in the usefulness and func-
tionality of distributed systems (Tanenbaum and van
Steen, 2016). According to Bejjam and Seshashayee
(2018), the data in distributed systems can be easily
analyzed (than on a single machine) and interpreted
in different ways and can also, be obtained from dif-
ferent sources. Many research groups are using drone
technologies with imaging sensors to acquire aerial
data where less time and less (human) efforts are
desired. Open-source toolkits help researchers col-
laborating with small and medium-sized enterprises
(SMEs) cost-effectively solve problems in various en-
vironmental fields (Vithlani et al., 2019).
Cloud computing is a popular concept for han-
dling web-based data processing, that hands over In-
formation Technology (IT) infrastructure and service
management to the service providers. The client can
utilize the modalities of distributed computing vastly
a
https://orcid.org/0000-0001-7721-3467
at the desired time. Although, there is no need to
set up and administer the physical infrastructure from
scratch, the users conventionally lean towards a mid-
dle path where the administration of the servers in dis-
tributed computing remains under their control (Gar-
rison and Nova, 2017).
This work aims to achieve auto-scaling for the
resource-hungry task of generating orthophoto us-
ing open-source tools (namely OpenDroneMap) in
a cloud-native environment (namely Kubernetes and
Rancher) was conducted. Kubernetes’ readying au-
tomation, scaling, and management of containerized
application can serve operational-end (Sarajlic et al.,
2018); while the open-source, web processing and re-
branding nature of OpenDroneMap (ODM) can serve
very well to the end-users. Contributions of this paper
include on-premise reference cloud computing archi-
tecture, added-value to the ODM project by Kuber-
netes deployment, auto-scaling workflow, and evalu-
ation using a parallel processing algorithm of ODM.
Section 2 captures the related works with its sup-
porting and opposite arguments for this work. Sec-
tion 3 conceptualizes virtualization approaches, con-
tainer orchestration technique, and ODM. Section 4
presents an experimental system and dataset prepara-
318
Vithlani, H., Dogotari, M., Lam, O., Prüm, M., Melville, B., Zimmer, F. and Becker, R.
Scale Drone Mapping on K8S: Auto-scale Drone Imagery Processing on Kubernetes-orchestrated On-premise Cloud-computing Platform.
DOI: 10.5220/0009816003180325
In Proceedings of the 6th International Conference on Geographical Information Systems Theory, Applications and Management (GISTAM 2020), pages 318-325
ISBN: 978-989-758-425-1
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
tion, workflow, and the dataset and parameters used
for the system evaluation. Discussion and visualiza-
tion of the results are presented in section 5. Closing
thoughts and future steps are discussed in section 6.
2 RELATED WORK
Cloud computing is becoming a more convenient
choice for geo-scientists because of its effective and
efficient resource management capabilities, and also
because web-based solutions allow multiple users at
the same time. Lan et al. (2018) investigated the
potential of processing massive remote-sensing im-
agery for land-cover change detection using cloud
computing. They concluded that the computation
time is directly proportional to the size of the dataset.
Kang and Lee (2016) studied the capability of auto-
scaling based on OpenStack, i.e. to scale the cloud-
environment based on the number of users. How-
ever, because OpenStack supports a huge software
stack, Suryateja (2020) suggested that its architec-
ture was not suitable for virtualized set ups. Ac-
cording to Martinez-rubi et al. (2017), parallel pro-
cessing was proven to be necessary to reduce com-
putation time for a photogrammetry process, and that
virtualization was desirable in the situation where re-
source constraints applied. To ensure the proposed set
up can benefit SMEs, open-source solutions are pre-
ferred. Groos et al. (2019) had demonstrated a low-
cost system set up and a promising use-case of high-
resolution imagery processing based on ODM. These
works demonstrated the potential of using open-
source cloud computing platforms for photogramme-
try workflows. Yet, to the best of our knowledge, no
research had been done in evaluating the performance
of parallel and on-premise cloud computing using Ku-
bernetes containerization technology in the case of
remote sensing image processing. Therefore, in this
work, not only an open-source photogrammetry pro-
cessing chain had been set up based on the previous
work in an on-premise cluster (Vithlani et al., 2019),
but system evaluation after auto-scaling had also been
performed using various datasets.
3 TOOLS AND TECHNOLOGIES
Cloud computing development has been trending and
lifted since the software advancement: Virtualiza-
tion. Conceptually, the virtualization technique cre-
ates division into physical resources and separates
them from original resources and other virtual envi-
ronments. Virtualization can be implemented through
various approaches. One approach is the hypervisor-
based approach, where a hypervisor is running on
the top of the host operating system (OS) and dis-
tributing the physical hardware resources to every
guest OS. Each physical machine is divided into dif-
ferent virtual machines (VMs) and can be used for
different purposes. This approach is advantageous
due to the above-mentioned reason. Yet the prob-
lem with this hypervisor is that each VM has its own
OS. Container-based virtualization approach came
into the market to overcome the problems with the
performance overhead of hosted hypervisors while
keeping the benefit of simpler deployment of the
same. This technology uses the fundamental concept
of using the kernel features to create an isolated vir-
tual environment for processes, makes it light-weight
and platform-independent (Pathak et al., 2019; Tae-
Hoon Kim and Rajput, 2016).
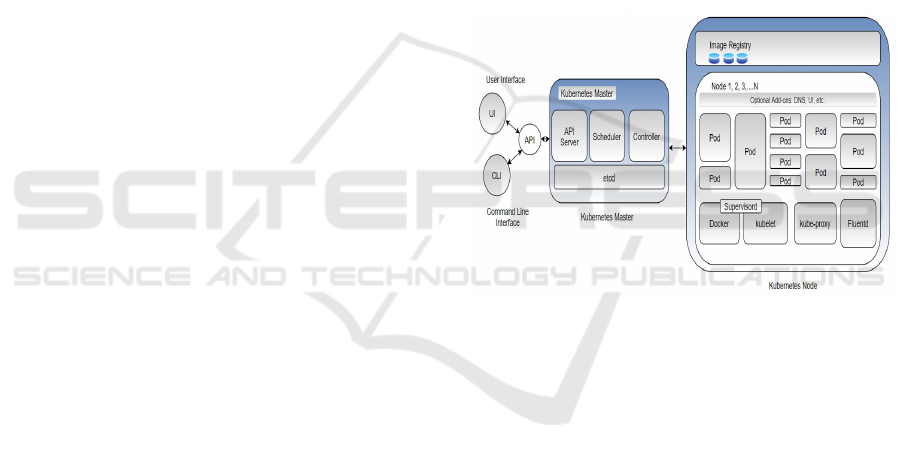
Figure 1: Kubernetes component diagram based on the
work by (MSV, 2016).
Kubernetes is an open-source project that is used for
managing large containerized workloads, as well as
scaling, automatic deployment, and provision as a ser-
vice in various sort of medium like virtual, physical
and cloud infrastructure. Another important advan-
tage of Kubernetes is that it controls and monitors
hardware usage like CPU, storage and RAM. From
the findings of Shah and Dubaria (2019), features
like popularity, community support, auto-scaling, log-
ging, monitoring, and better GUI are among the ad-
vantages of Kubernetes over the alternative orchestra-
tion platform Docker Swarm. After diligent consider-
ation, Kubernetes was chosen for the task. As illus-
trated in Figure 1, Kubernetes follows a master-slave
architecture. The Kubernetes master is responsible
for scheduling the deployments, allowing or disallow-
ing the application programming interfaces (APIs)
and monitoring the entire cluster. The API server
is used to control or communicate with the cluster
components using REST APIs. Kubernetes slaves
Scale Drone Mapping on K8S: Auto-scale Drone Imagery Processing on Kubernetes-orchestrated On-premise Cloud-computing Platform
319
- the worker nodes - handle the work-force and ex-
pose computation, network or storage. In this work,
Docker
1
(v18.09.3) has been selected as a container
run-time environment on each node, because of its
strong user-base. A pod, the smallest unit on a node,
consists of one or more containers inside it. It sup-
ports shared storage and network for the containers.
For scaling up or down an application, only the addi-
tion or deletion of the pods is required. Pod, service,
deployment and namespace definitions are stored in
the master node in etcd storage (an open-source key-
value store). The current status of Kubernetes objects
is exposed to the master node. The Kube-scheduler
schedules new workloads based on resource availabil-
ity. Kubectl is a command-line tool that helps to com-
municate with the API server.
4. Mesh
generation
1. Upload Imagery
&
GCP
2. SFM
3. MVS
8. Orthophoto
generation
7. DEM
6. Georeferencing
5. Texturing
View
Download
3D Model Map
NDVI,
Orthophoto,
DSM etc..
GCP - Ground Control Point
SFM - Structure From Motion
MVS - Multi-View Stereo
DEM - Digital Elevation Models
NDVI - Normalized Difference
Vegetation Index
DSM - Digital Surface Model
Input: Images and GCP
Output:1. Image database
2. Camera poses, sparse point cloud, and transform
3. Dense point cloud
4. 3D and 2.5D meshes
5. Textured meshes
6. Georeferenced point cloud, textured meshes, and crop boundaries
7. Digital surface models, digital terrain models, and classified georeferenced point cloud
8. Orthophoto
Figure 2: ODM processing chain based on the work by
(Toffanin, 2019).
OpenDroneMap (ODM) is an open-source pho-
togrammetry toolkit used for mosaicking, modeling,
analyzing and visualizing aerial imaging data (Open-
DroneMap, 2020). It is used in this work to support
the drone-related business activities of SMEs, while
providing them the freedom to modify and present
the project to different stakeholders and eliminating
the cost for the black-boxed vendor-owned software.
ODM can be utilized from the command line as well
as with a user-friendly web interface. According to
Toffanin (2019), ODM is used across different fields
for a multitude of applications, such as monitoring
agricultural crop yields, mapping land zones, classi-
fying and tallying trees, improving OpenStreetMap
and stitching aerial images. ODM is developed with a
microservice-based architecture in mind and supports
containerization. It can be seen from Figure 2 that
the collection of aerial imagery with Ground Control
Points (GCPs) (discretionary) is stacked in the first
processing steps from the user input. Structure from
1
https://github.com/docker
motion (SFM) is a photogrammetry approach for gen-
erating the 3D structure from overlapping 2D images
with the help of camera motion. Utilizing point of
view geometry and optics, the position and angle of
the camera can be recouped for each image. Mesh-
ing is the method of joining the results from previ-
ous steps to operate the dataset as a whole. Textur-
ing will assist with adding colors to meshes and cre-
ate texture meshes. Georeferencing is the method of
translating the local coordinate space to global coor-
dinate space. Once georeferenced, boundaries get de-
fined for the orthophotos and digital elevation models
(DEMs) (Toffanin, 2019).
4 EXPERIMENTAL WORKFLOW
The novelty of this experiment consists of on-premise
cloud computing, ODM deployment in Kubernetes to
achieve auto-scaling and its performance evaluation
for faster drone image post-processing.
4.1 System Configuration
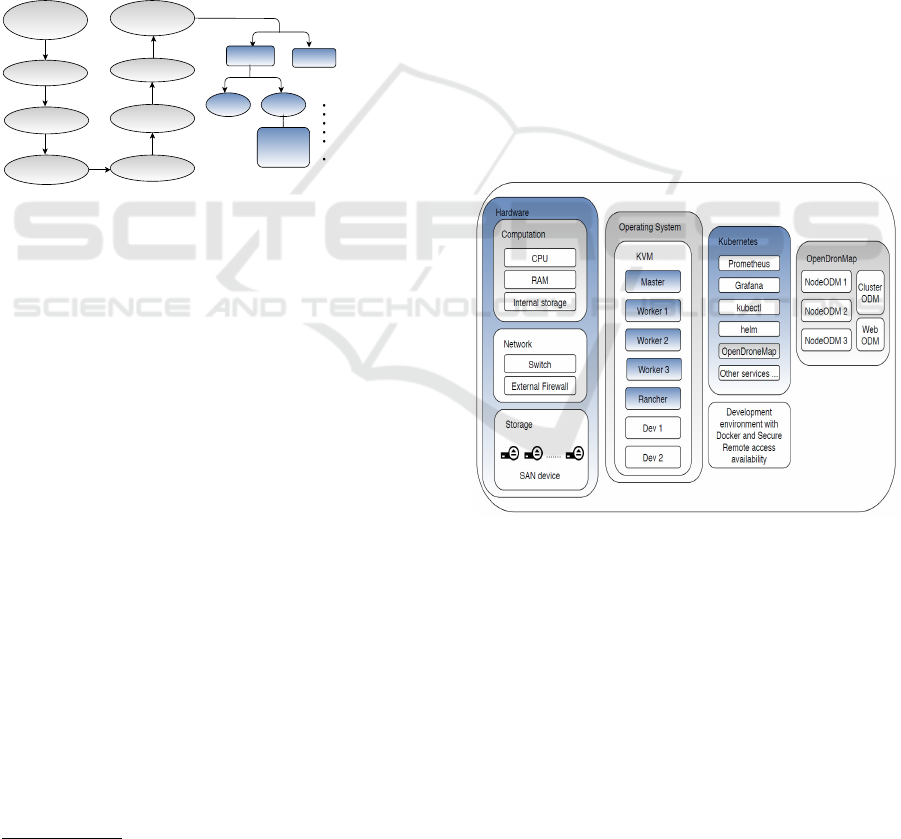
Figure 3: System design overview with software and hard-
ware components.
The system design overview with software and hard-
ware components is shown in Figure 3. For the num-
ber cruncher application of remote-sensing imagery
processing, a bare-metal set up was prepared. It con-
sisted of a computer cluster with high-performance
nodes, a 10 Gbps Cisco manageable switch, and a
Storage Area Network (SAN) device, which were set
up to serve as computation engines, backbone net-
work, and storage, respectively. To add heterogene-
ity in computation, processing nodes were chosen
with three different configurations (of CPUs, GPUs,
RAM, and SSDs) as shown in Table 1. All the servers
GISTAM 2020 - 6th International Conference on Geographical Information Systems Theory, Applications and Management
320
were provisioned with Ubuntu server OS (18.04.2
LTS GNU/Linux 4.15.0-58-generic x86-64) for easy
Kubernetes deployment.
Table 1: Bare-Metal servers configurations.
No. of
CPU
cores
No. of
GPUs
RAM
(GB)
Internal
SSD
(TB)
1 10 4 128 2
2 16 - 512 2
3 28 - 512 2
In this paper, auto-scaling were applied on all three
machines, a Kubernetes
2
(v1.16.3) master, develop-
ment engine, and Rancher GUI
3
GUI (v2.3.3) engine.
To realize this set up from the available configura-
tion a layer of virtualization was setup using an open-
source KVM
4
(Qemu v2.11.1) because of its perfor-
mance benefits and lower provisioning time. Rancher
empowers production-grade Kubernetes with back-
up, security, one-click installations, and a single com-
mand to add new workers or master nodes in the clus-
ter. Previous setup Vithlani et al. (2019) was ex-
panded to handle parallel workload using Kubernetes
in the presented work.
4.2 Process Flow
Parallel processing in ODM had been made avail-
able since version 0.6.0. However, auto-scaling
was only supported since ClusterODM (v1.3.7) when
commercial cloud platforms such as DigitalOcean,
Hetzner, Scaleway or Amazon Web Services were
made available. A new algorithm was introduced to
perform split-merge (Toffanin, 2019) for distributed
computing, after realizing the Horizontal Pod Au-
toscaler (HPA) in Kubernetes ODM deployment to
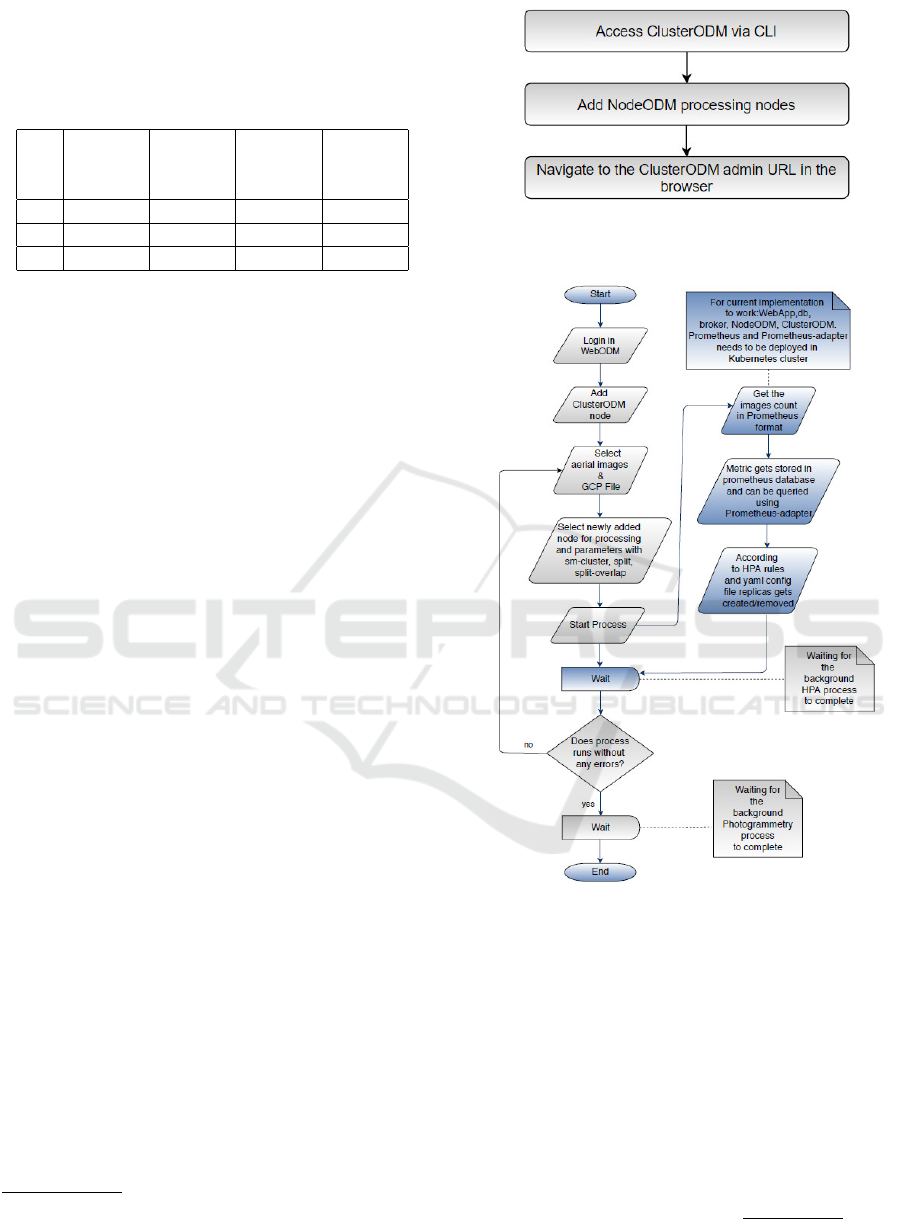
cost-effectively manage resources. To access multi-
ple processing instances (NodeODM v1.6.0) for dis-
tributed processing over a single network address
(ClusterODM), some obligatory steps were needed to
be performed by the administrator in advance as por-
trayed in Figure 4.
Figure 5 shows how the system was made accessi-
ble to the web-portal WebODM (v1.2.0) for better us-
ability. This user-centric approach is meant to provide
an abstraction layer over the underlying infrastruc-
ture, scaling calculations and resource management.
The parameters used in the proposed implementation
for parallel processing included (Toffanin, 2019):
2
https://github.com/kubernetes/kubernetes
3
https://github.com/rancher/rancher
4
https://github.com/qemu/qemu
Figure 4: Required steps for realizing auto-scaling and par-
allel processing with the help of ClusterODM.
Figure 5: Experimental workflow. Typical steps to be fol-
lowed by a user to realize auto-scaling and parallel process-
ing in WebODM.
• sm-cluster: it states a URL to a ClusterODM in-
stance. At the point when joined with the split
choice, it empowers the conveyed split-merge
pipeline for handling huge datasets in parallel uti-
lizing various processing nodes.
• split: for proper sub-division of the dataset. As
per Equation (1), this choice determines the num-
ber of images that ought to be processed in each
submodel.
number o f submodels =
total images
split value
(1)
Scale Drone Mapping on K8S: Auto-scale Drone Imagery Processing on Kubernetes-orchestrated On-premise Cloud-computing Platform
321

• split-overlap: for the adequate merging of the sub-
models. In arrange to adjust and blend comes
about, each submodel must be reproduced with a
certain sum of overlap (in meters) and redundancy
with other submodels.
Afterwards, the algorithm waited for the auto-scaling
status response, in order to proceed with the pho-
togrammetry step in parallel. The registered node
status (online/offline) from ClusterODM, served as a
validation point for the system’s recursive wait pe-
riod. This auto-scaling part was handled by Kuber-
netes after getting the required information from the
WebODM.
4.3 Auto-scaling in Kubernetes
In the presented work, the HPA was chosen due to
the dynamic resource utilization and limited resource
availability in SMEs. For HPA in Kubernetes to cal-
culate desired replicas custom metrics current value
needed to be exported. A newly introduced monitor
in the ODM, exports input files count (custom metric)
in Prometheus
5
format:
# HELP Cluster_images_in The number of Images
from Cluster input
# TYPE Cluster_images_in gauge
Cluster_images_in{method="IMAGES UPLOADED",
status="OK"} 524
These outcomes were then exported to a predicator
or Prometheus where it can be stored in and queried
from a time-series database setup in Kubernetes. In-
side Kubernetes, auto-scaling was performed based
on the specifications of the HPA config file:
kind: HorizontalPodAutoscaler
...
spec:
maxReplicas: 3
metrics:
- type: Pods
pods:
metric:
name: Cluster_images_in
target:
type: AverageValue
averageValue: "200"
minReplicas: 1
....
This example HPA config file is for custom metrics
type “Pod”. There are two different types of custom
metrics namely pod and object. Unlike pod metrics
that determine the replica count based on target value
averaged across pods, object metrics describe a dif-
ferent object in the same namespace. Desired replica
5
https://github.com/prometheus/prometheus
count can be derived as per Equation (2)
6
:
ceil
currentReplicas ×
currentMetric
desiredMetric
(2)
4.4 Evaluation Parameters
In order to evaluate the performance of the designed
approach, so that the results could be a reference for
SMEs working in the drone and environmental re-
search, datasets and system configuration that ful-
fill the 3Vs (volume, variety, and velocity) were se-
lected in this work. Higher and lower number of im-
ages were chosen for the experiment (volume); dif-
ferent datasets consist of RGB, Multispectral openly
available datasets and use-case specific self-acquired
drone imagery (variety); the speed of the execution
is ensured by the comparison of low and high config
nodes to distributed execution (velocity).
Processing enormous dataset is usually challeng-
ing with limited resources. This is because, with in-
crement in images count, RAM usage also increases.
In the split-merge algorithm, the dataset gets divided
into sub-parts called submodels. These submodels
can be processed parallelly on the local or remote
machine to overcome memory shortcomings while
achieving the desired output from the mapping pro-
cess (Toffanin, 2019).
Table 2: Dataset Overview.
Dataset Resolution
(DPI)
No. of
Images
Size
(MB)
GCP
Grassland
2019
72 186 2030 Yes
Waterbury 350 248 1921 No
Zoo 350 524 3521 No
Grassland
2018
72 662 5700 No
MicaSense 144 210 517.7 No
Garfield 96 112 276.2 No
Six geo-tagged datasets had been selected for system
evaluation. These included four open-source datasets
that were known as Waterbury (248 RGB images),
Zoo (524 RGB images), MicaSense
7
(210 multispec-
tral images) and Garfield (112 multispectral images).
As well as two grassland datasets that were acquired
using the consumer-grade DJI Phantom 4 Pro, known
as Grassland 2019 (186 RGB images) and Grassland
2018 (112 RGB images) (Lam et al., 2019). Table 2
shows the qualitative characteristics of each dataset.
6
https://kubernetes.io/docs
7
https://community.opendronemap.org/c/datasets/10
GISTAM 2020 - 6th International Conference on Geographical Information Systems Theory, Applications and Management
322
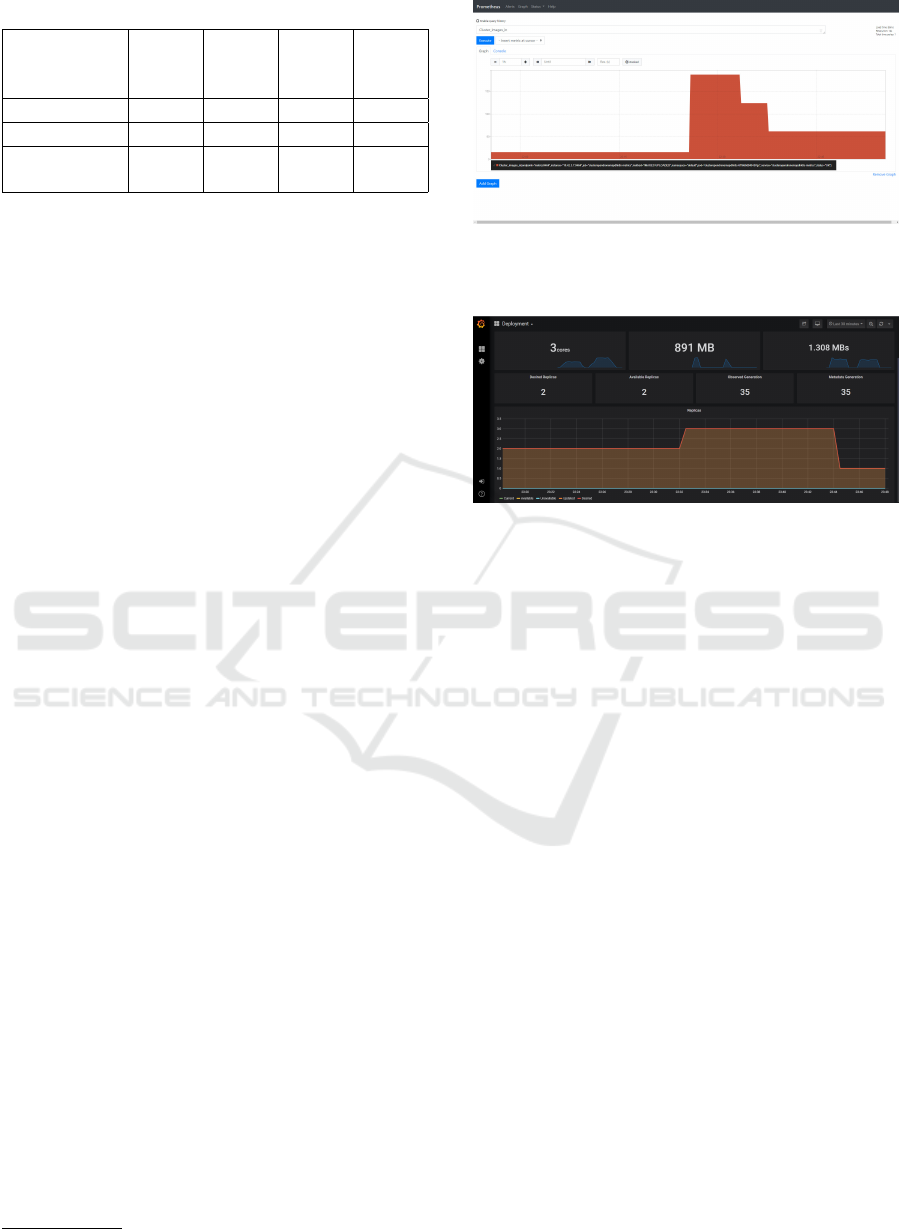
Table 3: Overview of the test machine configurations.
Machine
Configura-
tion
Logical
CPUs
RAM
(GB)
Split-
merge
Auto-
scaling
Low 10 ∼ 52 No Yes
High 28 ∼ 250 No Yes
3-worker
nodes
10,
28, 18
∼ 250 Yes Yes
Fine-tuning between resource necessity and process-
ing velocity can be analyzed by executing the algo-
rithm with three different configurations, which are
laid out in Table 3.
horizontal-pod-autoscaler-downscale-delay: 6s
horizontal-pod-autoscaler-
downscale-stabilization: 15s
horizontal-pod-autoscaler-sync-period: 3s
horizontal-pod-autoscaler-upscale-delay: 5s
prometheus.scrapeInterval: 15s
prometheus.evaluationInterval: 15s
For comparative evaluation of HPA implementations,
“Pod” and “Resource” metrics were evaluated with
Kubernetes metrics default scrape intervals as well as
modified intervals. Modified timeouts are listed above
while the response times are mentioned in Table 4.
5 RESULTS AND DISCUSSION
The performance of the proposed auto-scaled split-
and-merge system set up was evaluated using the six
datasets as described in Section 4.4. Exported val-
ues (input files count) from ODM as explained in
Section 4.3, got successfully parsed and queried via
Prometheus end-point. Time-series based representa-
tion of value change was scraped and visible in Figure
6. This time-series values can be further exploited (in
Kubernetes HPA) to perform auto-scaling. The out-
come of this internal HPA process can be visualized
with respect to current replica count (plus, resource
utilization) in Grafana
8
(v3.6.3) end-point as shown
in Figure 7.
The execution time of the photogrammetry pro-
cess relies on many external and internal parameters,
such as the data acquisition platform (drone, camera
model, sensors) and environmental conditions. How-
ever, results portrayed here only emphasis on the ef-
fect of computation power to the dataset processing
times as demonstrated in Figure 8. From the illustra-
tion, first four bar chart results represent the execution
time (in seconds) of the datasets Grassland 2018 and
8
https://github.com/grafana/grafana
Figure 6: View of Prometheus with time-series graph gen-
erated from different executions with the different number
of input images.
Figure 7: View of Grafana after auto-scaling performed on
OpenDroneMap Kubernetes deployment.
2019 respectively using the default and use-case spe-
cific parameters with the three configurations stated
in Table 3. The use-case specific parameters were
set to generate an orthophoto with the sub-centimeter
resolution of 0.3 cm/pixel from the acquired imagery.
Whereas, the remaining four bar chart results, display
the execution time (in seconds) of the open-source
RGB and multispectral datasets respectively.
Initial results showed that for larger datasets
(Grassland 2018), it took more than 11 hours to gen-
erate a high-resolution orthophoto (use-case specific)
with the low configuration node; while the execution
time was reduced to nearly 8 hours with the high
configuration node. This is further proven when the
process was run parallel on three workers nodes, the
execution time was almost halved in comparison to
the low configuration node. The results also demon-
strated that modification of the parameters such as in-
creasing the orthophoto and DEM resolutions from
the default 5 cm/pixel to 0.3 cm/pixel required more
execution time despite the size of the dataset (Grass-
land 2018 and Grassland 2019). This shows that split-
and-merge or parallel processing can provide faster
photogrammetry products.
Another observation was that running distributed
split-merge on an up-scaled set up (higher compu-
tation power) led to shorter execution time, which
can be seen especially in large datasets. However,
in the case of smaller datasets (Grassland 2019 and
Scale Drone Mapping on K8S: Auto-scale Drone Imagery Processing on Kubernetes-orchestrated On-premise Cloud-computing Platform
323
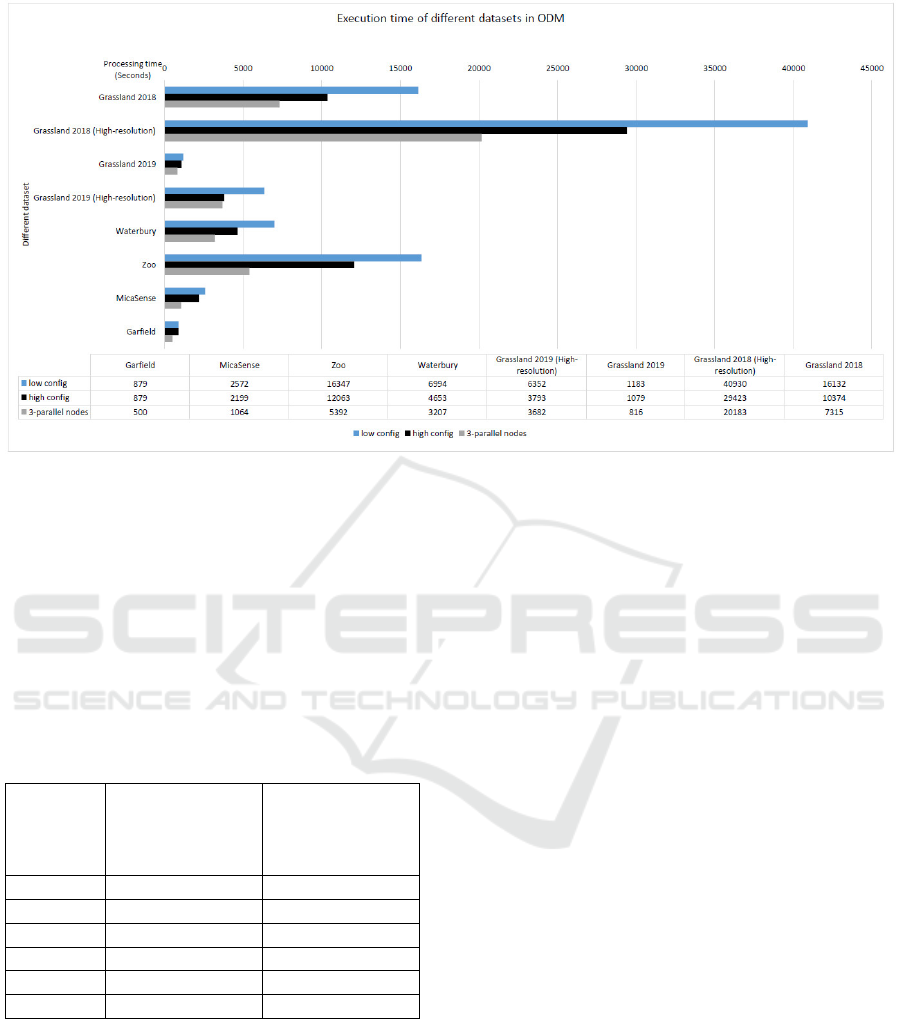
Figure 8: Computation time (in second) for the system evaluation based on the six datasets, including the use-specific cases
for Grassland 2018 and 2019.
Garfield), the computation time difference between
single and scaled parallel nodes was not as obvious.
It was also observed that with a small dataset, some-
times the distributed execution took more time than
expected. The reasons behind the delay were the split-
ting and merging steps, as well as the network and I/O
delays.
Table 4: Comparative evaluation of Kubernetes HPA before
and after modifications in timeout values and custom met-
rics type: object vs. pod.
No. of
replicas
[from-to]
Before modifi-
cations response
time (seconds)
[object type]
After modifica-
tions response
time (seconds)
[pod type]
[2-1] 206 76
[1-2] - 41
[2-3] 102 85
[3-1] 371 54
[1-3] 54 43
[3-2] 399 -
Critical reflections: The default timeout values in
HPA and Prometheus led to more auto-scaling delay
as shown in Table 4. Before modifying the delay,
times were noted based on the experiments rather than
the actual logic of Equation (2). As custom metrics
with “object” type fails to calculate replicas count ac-
cording to it. It was also unable in up-scaling from 1
to 2 replica count. However, these failures can be han-
dled up-to a certain extent by specifying pod custom
metric type in HPA because it is consistent with Equa-
tion (2). This custom metric comes with the limita-
tion of not being able to handle downscaling of 3 to 2
replicas count and end up running unnecessary Clus-
terODM instances. Apart from HPA implementation
problems, the ODM algorithm limits itself with JPEG
and TIFF files as input and no-support for GPUs.
6 CONCLUSION AND OUTLOOK
A novel approach of deploying a photogrammetry
toolkit on a Kubernetes managed on-premise cloud
computing cluster was proposed and evaluated in this
work. Comparison of generating orthophoto with
scaled parallel execution to the singular execution dis-
plays feasibility of drone-acquired imagery mapping
using the Kubernetes HPA method. In all the sce-
narios, the combination of auto-scaling and parallel
execution had proven to be faster than single node
executions. HPA turned out to be a promising Ku-
bernetes feature with respect to the orthophoto gen-
eration time for various datasets. The evaluation re-
sults showed that total orthophoto generation time
can be reduced with parallel processing, while auto-
scaling was achieved by fusing open-source tools in
ODM. This combination allowed the system to run
faster and more resource-efficient and provided a bet-
ter picture to the cloud service providers in prepa-
ration of an agreement with clients. After comple-
tion of the processing, the online “cloud-optimized-
GISTAM 2020 - 6th International Conference on Geographical Information Systems Theory, Applications and Management
324

GeoTIFF” feature of the latest ODM project can be
utilized to calculate the normalized difference vege-
tation index (NDVI) online which is shown in Figure
9. This client-side resource-saving feature is a really
good show-case of a low-cost end-to-end system.
Figure 9: Server-Side NDVI calculation from the processed
dataset using scaled nodes in WebODM portal.
In the future, further evaluation with larger datasets
can be performed to get a better idea about the sys-
tem saturation point. Security and backup, aspects
need to be considered to provide cloud service-level-
agreement with the proposed approach. To conclude,
the proposed scheme and the initial results repre-
sented a show-case in setting up a cloud-based web-
portal for faster and resource-efficient drone imagery
mapping on-premise.
ACKNOWLEDGEMENTS
This work is part of the SPECTORS project
with project number 143081, which is funded by
the cooperation program INTERREG Deutschland-
Nederland. The authors would like to acknowledge
the support of KnowH2O and Wageningen University
& Research in consultation, and the teuto.net Netzdi-
enste GmbH in technical support for the system.
REFERENCES
Bejjam, S. and Seshashayee, M. (2018). Big data concepts
and techniques in data processing. International Jour-
nal of Computer Sciences and Engineering, 6:712–
714.
Garrison, J. and Nova, K. (2017). Cloud Native Infrastruc-
ture: Patterns for Scalable Infrastructure and Appli-
cations in a Dynamic Environment. O’Reilly Media,
Inc., 1st edition.
Groos, A., Bertschinger, T., Kummer, C., Erlwein, S.,
Munz, L., and Philipp, A. (2019). The potential of
low-cost uavs and open-source photogrammetry soft-
ware for high-resolution monitoring of alpine glaciers:
A case study from the kanderfirn (swiss alps). Geo-
sciences, 9:356.
Kang, S. and Lee, K. (2016). Auto-scaling of geo-based im-
age processing in an openstack cloud computing envi-
ronment. Remote Sensing, 8:662.
Lam, O. H. Y., Melville, B., Dogotari, M., Pr
¨
um, M., Vith-
lani, H. N., Roers, C., Becker, R., and Zimmer, F.
(2019). Mapping invasive rumex obtusifolius in grass-
land using unmanned aerial vehicle. Multidisciplinary
Digital Publishing Institute Proceedings, 30(1):34.
Lan, H., Zheng, X., and Torrens, P. (2018). Spark sensing:
A cloud computing framework to unfold processing
efficiencies for large and multiscale remotely sensed
data, with examples on landsat 8 and modis data. Jour-
nal of Sensors, 2018:1–12.
Martinez-rubi, O., Nex, F., Pierrot-deseilligny, M., and
Rupnik, E. (2017). Improving foss photogrammetric
workflows for processing large image datasets. Open
Geospatial Data, Software and Standards, 2.
MSV, J. (2016). Kubernetes: An overview.
https://thenewstack.io/kubernetes-an-overview.
Accessed: 2020-01-18.
OpenDroneMap (2020). Odm, open source project retrieved
from. https://github.com/OpenDroneMap.
Pathak, A., Pandey, M., and Rautaray, S. (2019). Ap-
proaches of enhancing interoperations among high
performance computing and big data analytics via
augmentation. Cluster Computing, pages 1–36.
Sarajlic, S., Chastang, J., Marru, S., Fischer, J., and Lowe,
M. (2018). Scaling jupyterhub using kubernetes on
jetstream cloud: Platform as a service for research and
educational initiatives in the atmospheric sciences. In
Proceedings of the Practice and Experience on Ad-
vanced Research Computing, PEARC ’18. Associa-
tion for Computing Machinery.
Shah, J. and Dubaria, D. (2019). Building modern clouds:
Using docker, kubernetes google cloud platform. In
2019 IEEE 9th Annual Computing and Communica-
tion Workshop and Conference (CCWC), pages 0184–
0189.
Suryateja, P. S. (2020). Experimental analysis of openstack
effect on host resources utilization. In Khanna, A.,
Gupta, D., Bhattacharyya, S., Snasel, V., Platos, J.,
and Hassanien, A. E., editors, International Confer-
ence on Innovative Computing and Communications,
pages 11–19. Springer Singapore.
Tae-Hoon Kim, K. J. and Rajput, V. S. (2016). Adoption
of container-based virtualization in it education. In
2016 ASEE Annual Conference & Exposition. ASEE
Conferences. https://peer.asee.org/26530.
Tanenbaum, A. and van Steen, M. (2016). Chapter 1 of Dis-
tributed Systems - Principles and Paradigms. Maarten
van Steen.
Toffanin, P. (2019). OpenDroneMap: The Missing Guide.
UAV4GEO, first edition.
Vithlani, H. N., Marcel, D., Melville, B., Pr
¨
um, M., Lam,
O. H. Y., Becker, R., and Zimmer, F. (2019). Ap-
plicability of remote sensing workflow in kubernetes-
managed on-premise cluster environment. Multi-
disciplinary Digital Publishing Institute Proceedings,
30(1):38.
Scale Drone Mapping on K8S: Auto-scale Drone Imagery Processing on Kubernetes-orchestrated On-premise Cloud-computing Platform
325
