
Capability-based Scheduling of Scientific Workflows in the Cloud
Michel Kr
¨
amer
1,2 a
1
Fraunhofer Institute for Computer Graphics Research IGD, Fraunhoferstr. 5, 64283 Darmstadt, Germany
2
Technical University of Darmstadt, 64289 Darmstadt, Germany
Keywords:
Scientific Workflow Management Systems, Cloud Computing, Distributed Systems, Task Scheduling.
Abstract:
We present a distributed task scheduling algorithm and a software architecture for a system executing scientific
workflows in the Cloud. The main challenges we address are (i) capability-based scheduling, which means
that individual workflow tasks may require specific capabilities from highly heterogeneous compute machines
in the Cloud, (ii) a dynamic environment where resources can be added and removed on demand, (iii) scal-
ability in terms of scientific workflows consisting of hundreds of thousands of tasks, and (iv) fault tolerance
because in the Cloud, faults can happen at any time. Our software architecture consists of loosely coupled
components communicating with each other through an event bus and a shared database. Workflow graphs are
converted to process chains that can be scheduled independently. Our scheduling algorithm collects distinct
required capability sets for the process chains, asks the agents which of these sets they can manage, and then
assigns process chains accordingly. We present the results of four experiments we conducted to evaluate if our
approach meets the aforementioned challenges. We finish the paper with a discussion, conclusions, and future
research opportunities. An implementation of our algorithm and software architecture is publicly available
with the open-source workflow management system “Steep”.
1 INTRODUCTION
Scientific workflow management systems are used in
a wide range of areas including (but not limited to)
Bioinformatics (Oinn et al., 2004), Geology (Graves
et al., 2011), Geoinformatics (Kr
¨
amer, 2018), and As-
tronomy (Berriman et al., 2004) to automate the pro-
cessing of very large data sets. A scientific workflow
is typically represented by a directed acyclic graph
that describes how an input data set is processed by
certain tasks in a given order to produce a desired out-
come. Such workflows can become very large with
hundreds up to several thousands of tasks processing
data volumes ranging from gigabytes to terabytes.
Distributed computing infrastructures such as the
Grid (Foster and Kesselman, 1998), or the Cloud
(Mell and Grance, 2011) combine the computational
power and storage resources of a large number of in-
dependent machines. They provide a well-suited en-
vironment for the execution of scientific workflows.
In order to make best use of available resources, the
workflow tasks have to be assigned to the machines
in a smart way. While the general task scheduling
problem is known to be NP-complete (Ullman, 1975;
a
https://orcid.org/0000-0003-2775-5844
Johnson and Garey, 1979), the topic is of high inter-
est to the research community and several approaches
with varying aims and requirements have been pub-
lished to find practical solutions for the Grid and the
Cloud (Hemamalini, 2012; Singh and Chana, 2016).
In this paper, we present a distributed task
scheduling algorithm and a corresponding software
architecture for a scientific workflow management
system that specifically targets the Cloud. The main
challenge here is that, on the one hand, machines are
highly heterogeneous in terms of hardware, number
of virtual CPUs, main memory, and available stor-
age, but also with regard to installed software, drivers,
and operating systems. On the other hand, the differ-
ent tasks in a scientific workflow also have require-
ments. A compute-intensive task might need a min-
imum number of CPUs or even a graphics process-
ing unit (GPU), whereas another task might require a
large amount of main memory, and a third one needs
a specific software to be installed. In other words, the
machines have certain capabilities and the tasks have
requirements regarding these capabilities (or required
capabilities). This has to be considered during task
scheduling. As we show in Section 2, this concept has
not been fully covered by existing approaches yet.
Krämer, M.
Capability-based Scheduling of Scientific Workflows in the Cloud.
DOI: 10.5220/0009805400430054
In Proceedings of the 9th International Conference on Data Science, Technology and Applications (DATA 2020), pages 43-54
ISBN: 978-989-758-440-4
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
43

In addition to the heterogeneity of machines, the
topology of a Cloud is highly dynamic as new com-
pute and storage resources can be added on demand
and removed at any time. This property is often used
to scale a distributed application up when needed (e.g.
to manage peak load or to speed up processing) and
later down again to save resources and, in conse-
quence, money. Of course, scaling up only makes
sense if work can actually be distributed, which is typ-
ically the case when a workflow is very large and con-
tains many tasks that could potentially be executed in
parallel.
Also, it is known that in a distributed environment
(and in a Cloud in particular), faults such as crashed
machines, network timeouts, or missing messages can
happen at any time (Chircu, 2018). This highly af-
fects the execution of scientific workflows, which of-
ten take several hours or even days to complete.
1.1 Challenges and Requirements
To summarise the above, a scientific workflow man-
agement system running in the Cloud has to deal with
at least the following major challenges:
Capability-based Scheduling. Workflow tasks re-
quire different capabilities from the machines but, in
contrast, the infrastructure is highly heterogeneous.
Dynamic Environment. The execution environment
is highly dynamic and new compute resources can be
added and removed on demand.
Scalability. Scientific workflows can become very
large and may contain hundreds of thousands of tasks.
Fault Tolerance. In a distributed system, faults can
occur at any time.
From these challenges, we derive specific require-
ments that our scheduling algorithm and the software
architecture of our scientific workflow management
system should satisfy:
REQ 1. The algorithm should be able to assign tasks
to heterogeneous machines, while matching the ca-
pabilities the tasks need with the capabilities the ma-
chines provide.
REQ 2. Our system should not assume a static num-
ber of machines. Instead, it should horizontally scale
the workflow execution to new machines added to the
cluster and be able to handle machines being removed
(be it because a user or a service destroyed the ma-
chine or because of a fault).
REQ 3. If necessary, the execution of workflow
tasks that require capabilities currently not available
in the cluster should be postponed. The overall work-
flow execution should not be blocked. The algorithm
should continue with the remaining tasks and resched-
ule the postponed ones as soon as machines with the
required capabilities become available.
REQ 4. The system should support rapid elasticity.
This means it should automatically trigger the acqui-
sition of new machines on demand (e.g. during peak
load or when capabilities are missing).
REQ 5. The system should be scalable so it can man-
age workflows with a large number of tasks.
REQ 6. As faults can happen at any time in a dis-
tributed environment, our system should be able to
recover from those faults and automatically continue
executing workflows.
1.2 Contributions
The main contribution of this paper is our scheduling
algorithm that is able to assign workflow tasks to het-
erogeneous machines in the Cloud based on required
capability sets.
In addition, we present a software architecture of
a scientific workflow management system our algo-
rithm is embedded in. We describe a set of compo-
nents that communicate with each other through an
event bus and a database to perform task scheduling
in a scalable and fault-tolerant manner.
The remainder of this paper is structured as fol-
lows. We first analyse the state of the art in Section 2
and describe the research gap our work bridges. In
Section 3, we introduce an approach to map scien-
tific workflow graphs dynamically to individual pro-
cess chains (i.e. linear sequences of workflow tasks),
which can be treated independently by our schedul-
ing algorithm. After this, we present the software ar-
chitecture in Section 4 and finally our main contribu-
tion, the scheduling algorithm, in Section 5. In Sec-
tion 6, we also present the results of four experiments
we conducted to evaluate if our approach meets the
challenges and requirements defined above. We fin-
ish the paper in Section 7 with conclusions and future
research opportunities.
An implementation of our scheduling algorithm
and the software architecture is publicly available
with the Steep Workflow Management System, which
has recently been released under an open-source li-
cence on GitHub: https://steep-wms.github.io/
DATA 2020 - 9th International Conference on Data Science, Technology and Applications
44

2 RELATED WORK
Task scheduling can be performed in various ways.
Many algorithms employ heuristics to optimise re-
source usage and to reduce the makespan, i.e. the time
passed between the start of the first task in a sequence
and the end of the last one. Min-Min and Max-Min
(Ibarra and Kim, 1977; Freund et al., 1998), for exam-
ple, iterate through all tasks in the sequence and cal-
culate their earliest completion time on all machines.
Min-Min schedules the task with the minimum earli-
est completion time while Max-Min selects the task
with the maximum one. This process continues until
all tasks have been processed.
The algorithm Sufferage, in contrast, is able to
reassign a task from machine M to another one if
there is a second task that would achieve better per-
formance on M (Maheswaran et al., 1999). Casanova
et al. present a heuristic called XSufferage that ex-
tends Sufferage and also considers data transfer cost
(Casanova et al., 2000). They claim that their ap-
proach leads to a shorter makespan because of pos-
sible file reuse. Gherega and Pupezescu improve
this algorithm even further and present DXSufferage,
which is based on the multi-agent paradigm (Gherega
and Pupezescu, 2011). Their approach prevents the
heuristic itself from becoming a bottleneck in the
scheduling process.
The algorithms mentioned above are optimised
for certain situations. In contrast, genetic algorithms
(GA) are able to automatically adapt to changing con-
ditions. A GA mimics the process of natural evolu-
tion. It uses historical information to select the best
mapping of tasks to machines. Good results with GA,
for example, were achieved by Hamad and Omara
who use Tournament Selection (Hamad and Omara,
2016) or by Page and Naughton whose algorithm
does not make assumptions about the characteristics
of tasks or machines (Page and Naughton, 2005).
There are other approaches that apply behaviour
known from nature to the task scheduling problem.
Ant colony optimisation algorithms (Tawfeek et al.,
2013; Li et al., 2011), for example, try to dynam-
ically adapt scheduling strategies to changing envi-
ronments. Thennarasu et al. present a scheduler that
mimics the behaviour of humpback whales to maxi-
mize work completion and to meet deadline and bud-
get constraints (Thennarasu et al., 2020).
Besides scheduling algorithms that process in-
dividual tasks, there are more complex ones that
consider the interdependencies in a scientific work-
flow and try to find optimal solutions by analysing
the directed graph in total. Blythe at al. investi-
gate the difference between task-based approaches
like the ones mentioned above and the more com-
plex workflow-based approaches (Blythe et al., 2005).
They conclude that data-intensive applications benefit
from workflow-based approaches because the work-
flow system can start to transfer data before it is used
by the tasks, which leads to optimised resource usage.
Binato et al. present such a workflow-based ap-
proach using a greedy randomized adaptive search
procedure (GRASP) (Binato et al., 2002). Their algo-
rithm creates multiple scheduling solutions iteratively
and then selects the one that is expected to perform
best. Topcuoglu et al. present two algorithms: HEFT
and CPOP (Topcuoglu et al., 2002). HEFT traverses
the complete workflow graph and calculates priorities
for individual tasks based on the number of succes-
sors, average communication costs, and average com-
putation costs. CPOP extends this and prioritises crit-
ical paths in workflow graphs.
There are a number of distributed scientific work-
flow management systems that typically implement
one or more of the algorithms mentioned above.
Examples are Pegasus (Deelman et al., 2015), Ke-
pler (Altintas et al., 2004), Taverna (Hull et al., 2006),
Galaxy (Giardine et al., 2005), Airflow (Apache Air-
flow, 2020), and Nextflow (Di Tommaso et al., 2017).
Other frameworks that can process large data sets
in the Cloud are Spark (Zaharia et al., 2010) and
Flink (Carbone et al., 2015). They are not workflow
management systems but follow a similar approach
and also need to schedule tasks from a directed graph.
2.1 Research Gap
In the scientific community, dynamically changing
environments, very large workflows, and fault tol-
erance are considered major challenges for modern
distributed scientific workflow management systems,
which have not been fully covered by existing ap-
proaches yet and therefore offer many research op-
portunities (Deelman et al., 2018). In Section 1, we
discussed these challenges and added another major
one, namely that tasks in a scientific workflow need
certain capabilities from the machines but the Cloud
is highly heterogeneous.
A system that addresses all four of these chal-
lenges needs to be designed from the ground up with
them in mind. None of the approaches, algorithms,
and systems mentioned above (and to the best of our
knowledge, no other existing work) cover all of them
in one algorithm design. In this paper, we present
such an algorithm as well as the software architec-
ture it is embedded in.
There are similarities, however, between our ap-
proach and existing ones. DXSufferage, for exam-
Capability-based Scheduling of Scientific Workflows in the Cloud
45
ple, uses the multi-agent paradigm (Gherega and Pu-
pezescu, 2011). Similar to agents, our components
are independent and communicate with each other
through an event bus. There can be multiple sched-
ulers sharing work and processing the same workflow.
In addition, we convert workflow graphs to process
chains, which group tasks with the same required ca-
pabilities and common input/output data. Just like in
XSufferage (Casanova et al., 2000), this can poten-
tially lead to better file reuse.
Note that, in this paper, we focus on the afore-
mentioned Cloud challenges. Evaluating different
scheduling heuristics to achieve the shortest make-
span is beyond the scope of this paper and remains
for future work.
Also note that our approach is not directly com-
parable to workflow-based scheduling algorithms that
consider the graph in total. Instead, we employ a hy-
brid strategy that first splits the graph into process
chains and then schedules these instead of individual
tasks.
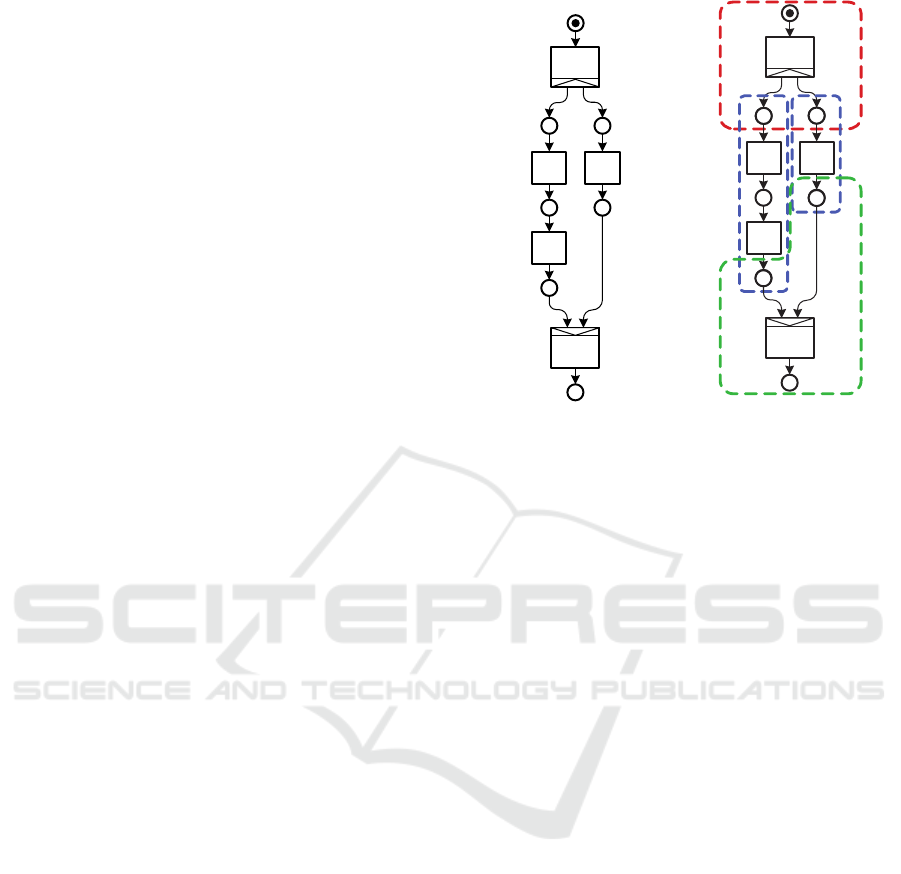
3 WORKFLOW SCHEDULING
As described above, a scientific workflow is typi-
cally represented by a directed graph that describes
in which order certain tasks need to be applied to an
input data set to produce a desired outcome. Figure 1a
shows a simple example of such a workflow in the ex-
tended Petri Net notation proposed by van der Aalst
and van Hee (2004). In this example, an input file is
first processed by a task A. This task produces two
results. The first one is processed by task B whose
result is in turn sent to C. The second result of A is
processed by D. The outcomes of C and D are finally
processed by task E.
In order to be able to schedule such a workflow
in a distributed environment, the graph has to be
transformed to individual executable units. Our sci-
entific workflow management system follows a hy-
brid scheduling approach that applies heuristics on the
level of the workflow graph and later on the level of
individual executable units. We assume that tasks that
access the same data should be executed on the same
machine to reduce the communication overhead and
to improve file reuse. We therefore group tasks into
so-called process chains, which are linear sequential
lists (without branches and loops).
While grouping the tasks, we also need to take
the capabilities into account that they require from the
machines in the Cloud. In our implementation, capa-
bilities are user-defined strings. For example, the set
{”Ubuntu”, ”GPU”} might mean that a task depends
A
B D
E
C
(a) Workflow graph.
A
B D
C
E
(b) Generated process
chains.
Figure 1: A workflow is split into four individual process
chains in three iterations.
on the Linux distribution Ubuntu as well as the pres-
ence of a graphics processing unit. We call the union
of the required capabilities of all tasks in a process
chain a required capability set.
Our system transforms workflows to process
chains in an iterative manner. In each iteration, it finds
the longest linear sequences of tasks with similar re-
quired capabilities and groups them to process chains
(see Figure 1b). For our example workflow, task A
will be put into a process chain in iteration 1. Our sys-
tem then schedules the execution of this process chain
according to the algorithm from Section 5. After the
execution has finished, the system uses the results to
produce a process chain containing B and C (assum-
ing they require similar capabilities) and another one
containing D. These process chains are then sched-
uled to be executed in parallel. The results are finally
used to generate the fourth process chain containing
task E, which is also scheduled for execution.
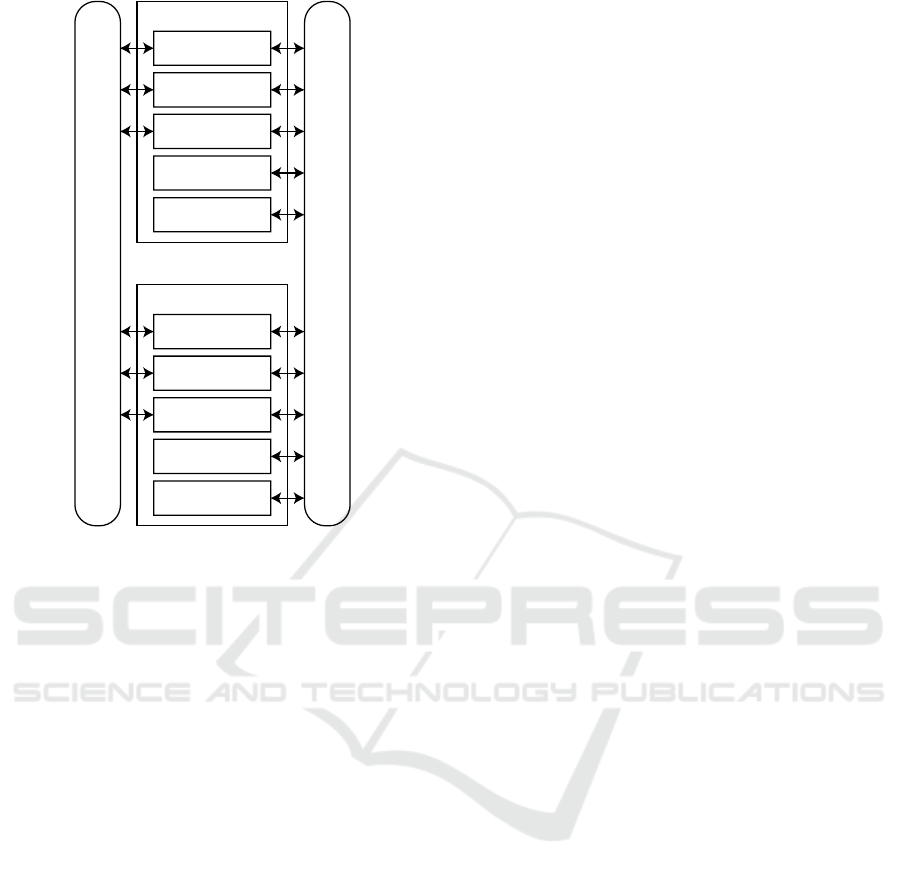
4 SOFTWARE ARCHITECTURE
Figure 2 shows the main components of our scien-
tific workflow management system: the HTTP server,
the controller, the scheduler, the agent, and the cloud
manager. Together, they form an instance of our sys-
tem. In practice, a single instance typically runs on
a separate virtual machine, but multiple instances can
also be started on the same machine. Each component
DATA 2020 - 9th International Conference on Data Science, Technology and Applications
46
HTTP server
Controller
Scheduler
Instance 1
Agent
...
Database
Event bus
Cloud manager
HTTP server
Controller
Scheduler
Instance n
Agent
Cloud manager
Figure 2: An overview of the components in our scientific
workflow management system and how they communicate
with each other.
can be enabled or disabled in a given instance. That
means, in a cluster, there can be instances that have all
five components enabled, and others that have only an
agent, for example.
All components of all instances communicate with
each other through messages sent over an event bus.
Further, the HTTP server, the controller, and the
scheduler are able to connect to a shared database. In
the following, we describe the roles and responsibili-
ties of each component.
The HTTP server provides information about
scheduled, running, and finished workflows to clients.
Clients can also upload a new workflow. In this case,
the HTTP server puts the workflow into the database
and sends a message to one of the instances of the
controller.
The controller receives this message, loads the
workflow from the database, and starts transforming it
iteratively to process chains as described in Section 3.
Whenever it has generated new process chains, it puts
them into the database and sends a message to all in-
stances of the scheduler.
The schedulers then apply our algorithm (see Sec-
tion 5) and select agents to execute the process chains.
The schedulers load the process chains from the
database, send them via the event bus to the selected
agents for execution, and finally write the results into
the database. The schedulers also send a message
back to the controller so it can continue with the next
iteration and generate more process chains until the
workflow has been completely transformed.
In case a scheduler does not find an agent suitable
for the execution of a process chain, it sends a mes-
sage to the cloud manager (a component that interacts
with the API of the Cloud infrastructure) and asks it
to create a new agent.
Note that messages between the HTTP server, the
controller, and scheduler may get lost (e.g. because of
network failures). Due to this, the controller and the
scheduler also check the database for new workflows
and process chains respectively at a regular interval.
We found 20 seconds to be a sensible value in prac-
tice, but in our implementation, this is configurable.
This approach decouples the components from each
other and increases fault tolerance.
5 CAPABILITY-BASED
SCHEDULING ALGORITHM
In this section, we present the capability-based
scheduling algorithm that is executed in our sched-
uler component. We first describe the main schedul-
ing function (Section 5.1) and then discuss how our
algorithm selects candidate agents (Section 5.2).
5.1 Main Scheduling Function
Listing 1 shows the main function of our schedul-
ing algorithm. As mentioned above, the scheduler
calls this function at regular intervals and immedi-
ately after new process chains have been added to the
database.
At the beginning, our algorithm calls
findRequiredCapabilitySets(). This function per-
forms a database query to retrieve all distinct sets of
capabilities required to execute the process chains not
scheduled yet. In other words, given a capability set
R
i
= {c
1
, ..., c
n
} for a process chain pc
i
, the result of
findRequiredCapabilitySets() is a set S = {R
1
, ..., R
m
}
of distinct required capability sets.
From line 3 on, our algorithm performs up to
maxLookups scheduling operations. After the regu-
lar interval or when new process chains have been
added, the function will be called with maxLookups
set to infinity. The main idea is that the function will
try to schedule as many process chains as possible un-
til it reaches a break statement. There is only one in
line 12 that is reached when there is no agent available
anymore (see below).
Capability-based Scheduling of Scientific Workflows in the Cloud
47

1 function lookup(maxLookups):
2 S = findRequiredCapabilitySets()
3 for i ∈ [0, maxLookups):
4 candidates = selectCandidates(S)
5 if candidates ==
/
0:
6 /∗ All agents are busy or none of them
7 have the required capabilities. ∗/
8 for R ∈ S:
9 if existsProcessChain(R):
10 launch:
11 requestAgent(R)
12 break
13 for (candidate, R) ∈ candidates:
14 pc = findProcessChain(R)
15 if pc == undefined:
16 /∗ All process chains with R were
17 executed in the meantime. ∗/
18 continue
19 agent = allocate(candidate)
20 if agent == undefined:
21 /∗ Agent is not available any more. ∗/
22 continue
23 /∗ Execute process chain
24 asynchronously. ∗/
25 launch:
26 executeProcessChain(pc, agent)
27 deallocate(agent)
28 /∗ Agent is has become available.
29 Trigger next lookup. ∗/
30 lookup(1)
Listing 1: The main function of our algorithm checks what
capabilities are required at the moment and if there are
available agents that can execute process chains with these
capabilities. If so, it retrieves such process chains from the
database and schedules their execution.
Inside the main for loop, the function first selects
a set of candidate agents that are able to execute at
least one of the given required capability sets from S
(line 4). The function selectCandidates() is described
in detail in Section 5.2. It returns a list of pairs of
a candidate agent and the required capability set R it
can execute.
If this list is empty (line 5), all agents are currently
busy or there is no agent that would be able to ex-
ecute at least one R ∈ S. In this case, the function
iterates over all required capability sets (line 8) and
checks if there actually is a corresponding registered
process chain in the database (line 9). This is neces-
sary because all process chains with a certain required
capability set may have already been processed since
findRequiredCapabilitySets() was called (e.g. by an-
other scheduler instance or in a preceding iteration of
the outer for loop). If there is a process chain, the
function requestAgent will be called, which asks the
cloud manager component (see Section 4) to create
a new agent that has the given required capabilities
(line 11). We use the keyword launch here to indicate
that the call to requestAgent is asynchronous, mean-
ing the algorithm does not wait for an answer.
The algorithm then leaves the outer for loop be-
cause it is unnecessary to perform any more schedul-
ing operations while none of the agents can execute
process chains (line 12). Process chains with required
capabilities none of the agents can provide will es-
sentially be postponed. As soon as the cloud manager
has created a new agent with the missing capabilities,
the lookup function will be called again and any post-
poned process chains can be scheduled.
If there are agents available that can execute pro-
cess chains with any of the required capability sets
from S, the algorithm iterates over the result of
selectCandidates() in line 13. For each pair of a can-
didate agent and the corresponding required capabil-
ity set R it can execute, the algorithm tries to find
a matching registered process chain with R in the
database. If there is none, it assumes that all process
chains with this required capability set have already
been executed in the meantime (line 15). Otherwise,
it tries to allocate the candidate agent, which means
it asks it to prepare itself for the execution of a pro-
cess chain and to not accept other requests anymore
(line 19). If the agent cannot be allocated, it was prob-
ably allocated by another scheduler instance in the
meantime since selectCandidates was called (line 20).
Otherwise, the algorithm launches the execution
of the process chain in the background and contin-
ues with the next scheduling operation. The code
block from line 25 to line 30 runs asynchronously
in a separate thread and does not block the outer for
loop. As soon as the process chain has been exe-
cuted completely in this thread, our algorithm deal-
locates the agent in line 27 so it becomes available
again. It then calls the lookup function and passes 1
for maxLookups because exactly one agent has be-
come available and therefore only one process chain
has to be scheduled.
5.2 Selecting Candidate Agents
The function selectCandidates takes a set S =
{R
1
, ..., R
n
} of required capability sets and returns a
DATA 2020 - 9th International Conference on Data Science, Technology and Applications
48

1 function selectCandidates(S):
2 candidates =
/
0
3 for a ∈ Agents:
4 send S to a and wait for response
5 if a is available:
6 get best R
i
∈ S from response
7 P = (a, R
i
)
8 candidates = candidates ∪ {P}
9 L = all P ∈ candidates with best a for each R
i
10 return L
Listing 2: Pseudo code of the function that selects agents
based on their capabilities.
list L = {P
1
, ..., P
m
} of pairs P = (a, R
i
) of an agent a
and the matching required capability set R
i
. Listing 2
shows the pseudo code.
The function sends all required capability sets to
each agent via the event bus. The agents respond
whether they are available and which required capa-
bility set they support best. The function collects all
responses in a set of candidates. It finally selects ex-
actly one agent for each required capability set.
The decision of which available agent to select can
be implemented based on certain heuristics (e.g. the
expected earliest completion time of process chains
with the given required capability set). In our im-
plementation, we select the agent that was idle for
the longest time. In practice, this has proven to be
a heuristic that achieves good throughput and, at the
same time, prevents starvation because every agent
will be selected eventually.
Note that some or all agents might not be avail-
able, in which case the result of selectCandidates con-
tains less required capability sets than S or is even
empty.
6 EVALUATION
In Section 1.1, we defined four major challenges for
the management of scientific workflows in the Cloud
and derived six requirements for our system. In order
to evaluate if our scheduling algorithm and our soft-
ware architecture meet these challenges and require-
ments, we conducted four practical experiments (one
for each challenge). In this section, we present the
results of these experiments and discuss benefits and
drawbacks of our approach.
Table 1: This caption has more than one line so it has to be
justified.
Required capability
set
Maximum number of
agents
R1 2
R2 2
R3 1
R4 1
R3 + R4 2
Total 8
6.1 Setup
All experiments were performed in the same environ-
ment. We set up our system in a private OpenStack
Cloud and configured it so that it could access the
Cloud’s API and create further virtual machines on
demand. We deployed the full stack of components
presented in Section 4 to each virtual machine. These
components communicated with each other through a
distributed event bus. They also shared a MongoDB
database deployed to a separate virtual machine. In
the following, according to our system architecture,
we use the term agent for a virtual machine running
our system and capable of executing process chains.
We defined four types of agents with the capabil-
ity sets R1, R2, R3, R4, as well as fifth type offering
both capability sets R3 and R4. To simulate a het-
erogeneous environment, we configured a maximum
number of agents that our system was allowed to cre-
ate per required capability set (see Table 1).
For each experiment, we collected all log files of
all instances of our system and converted them to
graphs. Figure 3 shows the results. Each of the sub-
figures—which we discuss in detail in the following
sections—depicts a timeline of a workflow run. The
lanes (from left to right) represent individual agents
and indicate when they were busy executing process
chains. Each required capability set has a different
colour (see legend in Figure 3d). The colour of the
agents and the process chains specifies what capabil-
ities they offered or required respectively. A process
chain has a start (emphasized by a darker shade of the
colour) and an end. In experiment 4, we also killed
agents on purpose. The point in time when the fault
was induced is marked by a black X.
6.2 Experiments
Experiment 1: Capability-based Scheduling
(Requirement covered: REQ 1)
Our primary goal in this paper was to create a schedul-
ing algorithm that is able to assign workflow task to
Capability-based Scheduling of Scientific Workflows in the Cloud
49
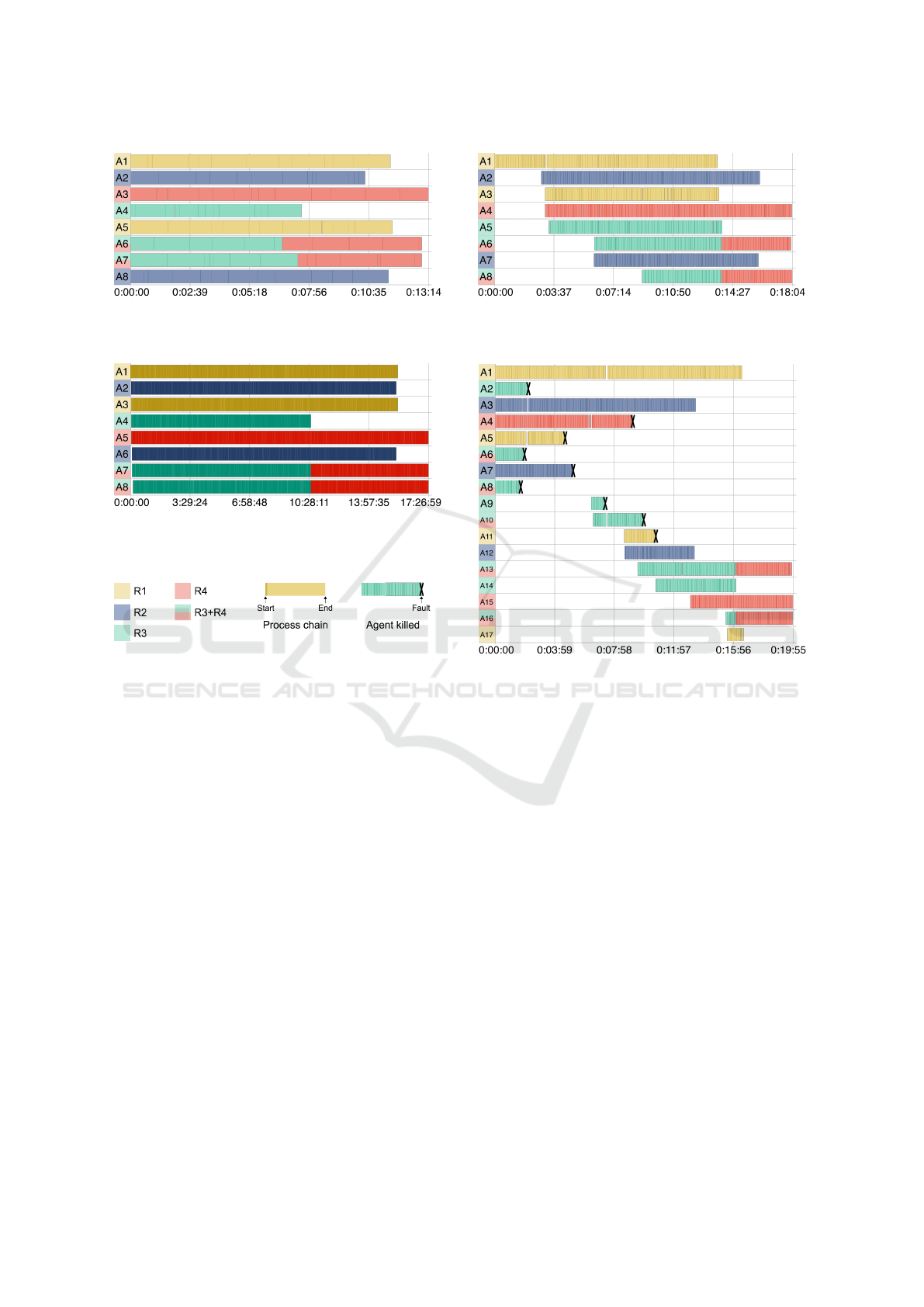
(a) 100 process chains are distributed to the agents with the
correct capabilities.
(b) The system creates agents with capabilities required by
1000 process chains on demand.
(c) The system is able to handle 150000 process chains.
(d) Legend: colours for required capability sets, start and
end of a process chain, and time when an agent was killed.
(e) The system is able to recover from faults and to still
finish all 1000 process chains from the current workflow.
Figure 3: Results of our experiments.
distributed machines based on required and offered
capabilities. Figure 3a shows we reached this goal.
We deployed a static number of eight agents with
different capability sets. We then sent a workflow
consisting of 100 process chains to one of the in-
stances of our system. As soon as the workflow was
saved in the database, all scheduler instances started
assigning process chains to the individual agents. The
colours in the figure show that all process chains were
correctly assigned. The workflow took 13 minutes
and 14 seconds to complete in total.
Note that our algorithm is designed to ask the
agents which required capability set they would like
to execute before assigning process chains to them
(see Section 5.2). Agents A6 and A7 were able to exe-
cute process chains requiring both R3 and R4 but they
obviously preferred to accept the ones with R3 first
before they continued with R4.
Experiment 2: Dynamic Environment
(Requirements covered: REQ 1–4)
For our second experiment, we deployed only one
agent with capability set R1. We then executed a
workflow with 1000 process chains. Figure 3b shows
the timeline of the workflow run.
As soon as the first scheduler instance found all
required capability sets in the database, it asked the
cloud manager component of our system to create
new agents. Starting a virtual machine and deploying
itself to it took our system almost three minutes. Pro-
cess chains requiring missing capabilities were post-
poned but the scheduler continued assigning the ones
with R1. As soon as the new agents had started, pro-
cess chains were assigned to them.
Note that in our implementation, the cloud man-
ager only creates one agent of a certain capability set
at a time. Also, as described earlier, we configured a
maximum number of agents per capability set. These
are the reasons why only four new agents appear at
DATA 2020 - 9th International Conference on Data Science, Technology and Applications
50

about minute 3, two others at minute 6, and a
final one between minutes 8 and 9.
The experiment shows that our system can create
new virtual machines on demand and that the sched-
ulers make use of new resources as soon as they be-
come available.
Experiment 3: Scalability
(Requirements covered: REQ 1–5)
In order to show the scalability of our system, we
launched a workflow with 150000 process chains.
Similar to the second experiment, we started with one
agent. The other ones were automatically created by
our system on demand.
Figure 3c shows the timeline of the workflow over
more than 17 hours. The darker colour of the graph
stems from the fact that there are a lot more start
events in this workflow than in the other ones.
Again, all process chains were assigned to the
correct machines. Although the number of process
chains the system had to manage was very large, it did
not crash and kept being responsive the whole time.
Experiment 4: Fault Tolerance
(Requirements covered: all)
Our final experiment tested if our system can man-
age faults during a workflow run. Figure 3e shows
the timeline. We started with eight agents and ex-
ecuted the same workflow as in experiment 2 with
1000 process chains. At about minute 2, we started
to randomly kill agents (indicated in the figure by a
black X) by sending them a SIGKILL signal.
We killed nine agents during the workflow run.
The figure shows that each time, the system was able
to recover from the faults. It created new agents with
the missing required capabilities and started assigning
process chains to them as soon as they became avail-
able. Between minutes 2 and 6, approximately, there
was no agent that was able to execute process chains
with R3. Similarly, between minutes 9 and 13, ap-
proximately, R4 was not processed by any agent (A13
would have been able to, but as mentioned earlier, it
preferred to execute R3 first). The execution of these
process chains was postponed and resumed later.
6.3 Discussion
The results of our experiments show that our system
meets all of the challenges and requirements for the
management of scientific workflows in the Cloud de-
fined in Section 1.1.
In order to assign process chains to the correct ma-
chines with matching capabilities, our scheduler asks
each agent whether it wants to execute a process chain
with a given required capability set or not. An alter-
native approach would be to let the agents fetch the
process chains themselves whenever they are ready to
execute something. However, in this case, it would
not be possible to create agents on demand. If there
is no agent fetching process chains, nothing can be
executed. Our scheduler, on the other hand, has an
overview of all required capability sets and can ac-
quire new resources when necessary.
As described in Section 5.2, our current imple-
mentation of the scheduler chooses between multiple
available agents by comparing their idle time. Al-
though this works very well in practice, our exper-
iments have shown that this approach leaves room
for improvement. For example, in experiment 1
(Figure 3a), if the schedulers had assigned process
chains with R4 to agents A6 and A7 earlier, then the
makespan could have been reduced by approximately
one or two minutes (about 5–10%). Agents A3, A6,
and A7 would have finished earlier with R4 while
agent A4 could have processed R3 until the end.
Nevertheless, our approach allows various
scheduling strategies to be implemented since our
scheduler has a complete overview of the required
capability sets and the available agents. Different
heuristics such as Min-Min or Max-Min can be im-
plemented in the selectCandidates function without
changing the general structure of the algorithm.
Note that these heuristics would work on the level
of required capability sets and not on the individual
process chains, which differentiates our approach
from existing works. However, investigating different
heuristics and optimising the makespan was not a
goal of this paper and remains for future work.
The scalability and fault tolerance of our approach
mostly stems from the fact that we use a database to
store process chains. First, this out-of-core approach
reduces the required main memory. Only a few pro-
cess chains (plus all distinct required capability sets)
need to be kept in memory at a time, which allows
hundreds of thousands of process chains to be sched-
uled without any issue. Second, since the database
holds the remaining process chains to execute, it es-
sentially keeps the current state of the overall work-
flow execution. If one scheduler instance crashes, an-
other one can take over. Our open-source implemen-
tation even supports resuming workflows if all sched-
ulers have crashed after a restart of the whole cluster.
The database can considered a single point of fail-
ure. If it becomes unavailable, workflow execution
cannot continue. In pratice, this is not a problem be-
cause as soon as it is up again, our scheduling algo-
rithm can proceed and no information will be lost.
However, the database has an impact on scheduling
Capability-based Scheduling of Scientific Workflows in the Cloud
51

performance. Our algorithm as it is presented in Sec-
tion 5 needs to fetch the set of distinct required ca-
pability sets each time the lookup function is called.
Queries for distinct values are known to be time-
consuming, especially for large collections like in our
case. The only way to find all distinct values is to
perform a sequential scan. Most DBMS even have to
sort the collection first. There are approaches to find
approximations of distinct values (Kane et al., 2010;
Bar-Yossef et al., 2002) but our algorithm needs exact
results. Our open-source implementation therefore
caches the set of required capability sets for a config-
urable amount of time. Our algorithm is robust, and
even when this cache becomes inconsistent with the
database, it will still work correctly. It will either not
find a process chain for a given required capability set
(Listing 1, line 15), or one or more required capability
sets will be missing from the cache. In the first case,
the algorithm will just continue with the next candi-
date agent and required capability set (line 18). Re-
garding the second case, adding new process chains
will trigger a cache update, so the next scheduling op-
eration will be able to use all required capability sets.
In any case, after the configurable amount of time has
passed, the cache will be updated anyhow.
Our experiments have revealed other places where
our system could be improved. At the moment, our
cloud manager creates only one agent per capability
set at a time. This could be parallelised in the fu-
ture to further reduce the makespan. Also, there are
small gaps visible between process chain executions
in our evaluation timelines. In experiment 4, they are
due to the fact that we killed schedulers that had just
allocated an agent and did not get the chance to deal-
locate it. In our implementation, agents automatically
deallocate themselves if they do not receive a message
from a scheduler for a certain amount of time, but un-
til then, they do not execute anything. The gaps in the
other experiments are most likely due to long database
operations but need further investigation. As can be
seen in Figure 3, these gaps are very small (only a
few milliseconds) and do not happen very often.
7 CONCLUSION
In Section 1.1, we identified four major challenges re-
garding the execution of scientific workflows in the
Cloud: capability-based scheduling, a dynamic envi-
ronment, scalability, and fault tolerance. These chal-
lenges, and in particular capability-based scheduling,
have not been fully covered in the scientific com-
munity yet. In this paper, we presented a schedul-
ing algorithm and a software architecture for a scien-
tific workflow management system that address these
challenges. In four experiments, we have shown that
our approach works and meets our requirements. We
also discussed benefits and drawbacks.
We implemented our algorithm and the software
architecture in the Steep Workflow Management Sys-
tem, which has recently been released under an open-
source licence (https://steep-wms.github.io/). We are
using Steep in various projects. One of them, for ex-
ample, deals with the processing of large point clouds
and panorama images that have been acquired with a
mobile mapping system in urban environments. The
data often covers whole cities, which makes the work-
flows particularly large with thousands of process
chains. The point clouds are processed by a service
using artificial intelligence (AI) to classify points and
to detect fac¸ades, street surfaces, etc. Since this is
a time-consuming task and the workflows often take
several days to execute, the scalability and fault toler-
ance of our system are fundamental in this project.
In addition, the AI service requires a graphics pro-
cessing unit (GPU), which is a limited resource in
the Cloud and particularly expensive. Our capability-
based scheduling algorithm helps in this respect to
distribute the workflow tasks to the correct machines
(i.e. to only use GPU machines when necessary). As
our system supports elasticity and a dynamic number
of machines, we can also scale up and down on de-
mand, only create GPU machines when needed, and
release them as soon as possible. In other words, in
this project, our system saves time and money.
Based on the work presented in this paper, there
are a number of opportunities for future research. For
example, the iterative approach to transform work-
flow graphs to process chains presented in Section 3
allows very complex workflows to be processed.
It supports workflows without a priori design-time
knowledge (Russell et al., 2016), which means the
system does not need to know the complete structure
of the workflow before the execution starts. This en-
ables us to dynamically change the structure of the
workflow during the execution as the number of in-
stances of a process chain can depend on the results of
a preceding one. The approach is also suitable to ex-
ecute workflows without a priori runtime knowledge,
meaning that the number of instances of a certain pro-
cess chain may even change while the process chain
is running. This enables cycles and recursion. Details
on this will be the subject of a future publication we
are currently working on.
Our experiments have revealed areas where our
approach and implementation can be further im-
proved. In the future, we will investigate different
scheduling heuristics such as Min-Min or Max-Min
DATA 2020 - 9th International Conference on Data Science, Technology and Applications
52

to improve the makespan of workflows. As mentioned
above, we also discovered small gaps in the results of
our experiments. They are most likely due to the way
we implemented our system. We will investigate them
and try to find optimisations. Further, we will improve
our cloud manager so it creates multiple agents with
a given capability set in parallel.
REFERENCES
Altintas, I., Berkley, C., Jaeger, E., Jones, M., Ludascher,
B., and Mock, S. (2004). Kepler: an extensible sys-
tem for design and execution of scientific workflows.
In Proceedings. 16th International Conference on Sci-
entific and Statistical Database Management, 2004.,
pages 423–424. IEEE.
Apache Airflow (2020). Apache Airflow Website.
https://airflow.apache.org/. Last accessed: 2020-04-
14.
Bar-Yossef, Z., Jayram, T. S., Kumar, R., Sivakumar, D.,
and Trevisan, L. (2002). Counting distinct elements in
a data stream. In Rolim, J. D. P. and Vadhan, S., edi-
tors, Randomization and Approximation Techniques in
Computer Science, pages 1–10. Springer Berlin Hei-
delberg.
Berriman, G. B., Deelman, E., Good, J. C., Jacob, J. C.,
Katz, D. S., Kesselman, C., Laity, A. C., Prince, T. A.,
Singh, G., and Su, M.-H. (2004). Montage: a grid-
enabled engine for delivering custom science-grade
mosaics on demand. In Optimizing Scientific Return
for Astronomy through Information Technologies, vol-
ume 5493, pages 221–233. International Society for
Optics and Photonics.
Binato, S., Hery, W. J., Loewenstern, D. M., and Resende,
M. G. C. (2002). A Grasp for Job Shop Scheduling,
pages 59–79. Springer US.
Blythe, J., Jain, S., Deelman, E., Gil, Y., Vahi, K., Man-
dal, A., and Kennedy, K. (2005). Task scheduling
strategies for workflow-based applications in grids.
In Proceedings of the IEEE International Symposium
on Cluster Computing and the Grid (CCGrid), pages
759–767.
Carbone, P., Katsifodimos, A., Ewen, S., Markl, V., Haridi,
S., and Tzoumas, K. (2015). Apache Flink: Stream
and batch processing in a single engine. Bulletin of
the IEEE Computer Society Technical Committee on
Data Engineering, 36(4):28–38.
Casanova, H., Legrand, A., Zagorodnov, D., and Berman, F.
(2000). Heuristics for scheduling parameter sweep ap-
plications in grid environments. In Proceedings of the
9th Heterogeneous Computing Workshop HCW, pages
349–363.
Chircu, V. (2018). Understanding the 8 fallacies of
distributed systems. https://dzone.com/articles/
understanding-the-8-fallacies-of-distributed-syste.
Last accessed: 2020-02-18.
Deelman, E., Peterka, T., Altintas, I., Carothers, C. D., van
Dam, K. K., Moreland, K., Parashar, M., Ramakrish-
nan, L., Taufer, M., and Vetter, J. (2018). The fu-
ture of scientific workflows. The International Jour-
nal of High Performance Computing Applications,
32(1):159–175.
Deelman, E., Vahi, K., Juve, G., Rynge, M., Callaghan, S.,
Maechling, P. J., Mayani, R., Chen, W., Ferreira da
Silva, R., Livny, M., and Wenger, K. (2015). Pegasus:
a workflow management system for science automa-
tion. Future Generation Computer Systems, 46:17–
35.
Di Tommaso, P., Chatzou, M., Floden, E. W., Barja, P. P.,
Palumbo, E., and Notredame, C. (2017). Nextflow en-
ables reproducible computational workflows. Nature
biotechnology, 35(4):316–319.
Foster, I. and Kesselman, C., editors (1998). The Grid:
Blueprint for a New Computing Infrastructure. Mor-
gan Kaufmann Publishers Inc., San Francisco, CA,
USA.
Freund, R. F., Gherrity, M., Ambrosius, S., Campbell, M.,
Halderman, M., Hensgen, D. Z., Keith, E., Kidd, T.,
Kussow, M., Lima, J. D., Mirabile, F., Lantz, M.,
Rust, B., and Siegel, H. J. (1998). Scheduling re-
sources in multi-user heterogeneous computing envi-
ronments with SmartNet. Calhoun: The NPS Institu-
tional Archive.
Gherega, A. and Pupezescu, V. (2011). Multi-agent re-
source allocation algorithm based on the xsufferage
heuristic for distributed systems. In Proceedings of
the 13th International Symposium on Symbolic and
Numeric Algorithms for Scientific Computing, pages
313–320.
Giardine, B., Riemer, C., Hardison, R. C., Burhans, R.,
Elnitski, L., Shah, P., Zhang, Y., Blankenberg, D.,
Albert, I., Taylor, J., Miller, W., Kent, W. J., and
Nekrutenko, A. (2005). Galaxy: a platform for inter-
active large-scale genome analysis. Genome research,
15(10):1451–1455.
Graves, R., Jordan, T. H., Callaghan, S., Deelman, E., Field,
E., Juve, G., Kesselman, C., Maechling, P., Mehta, G.,
Milner, K., Okaya, D., Small, P., and Vahi, K. (2011).
Cybershake: A physics-based seismic hazard model
for southern california. Pure and Applied Geophysics,
168(3):367–381.
Hamad, S. A. and Omara, F. A. (2016). Genetic-based
task scheduling algorithm in cloud computing envi-
ronment. International Journal of Advanced Com-
puter Science and Applications, 7(4):550–556.
Hemamalini, M. (2012). Review on grid task scheduling in
distributed heterogeneous environment. International
Journal of Computer Applications, 40(2):24–30.
Hull, D., Wolstencroft, K., Stevens, R., Goble, C., Pocock,
M. R., Li, P., and Oinn, T. (2006). Taverna: a tool for
building and running workflows of services. Nucleic
acids research, 34:W729–W732.
Ibarra, O. H. and Kim, C. E. (1977). Heuristic algorithms
for scheduling independent tasks on nonidentical pro-
cessors. Journal of the ACM, 24(2):280–289.
Johnson, D. S. and Garey, M. R. (1979). Computers
and Intractability: A guide to the theory of NP-
completeness. WH Freeman.
Capability-based Scheduling of Scientific Workflows in the Cloud
53

Kane, D. M., Nelson, J., and Woodruff, D. P. (2010). An
optimal algorithm for the distinct elements problem.
In Proceedings of the 29th ACM SIGMOD-SIGACT-
SIGART Symposium on Principles of Database Sys-
tems, PODS ’10, pages 41–52. Association for Com-
puting Machinery.
Kr
¨
amer, M. (2018). A Microservice Architecture for the
Processing of Large Geospatial Data in the Cloud.
PhD thesis, Technische Universit
¨
at Darmstadt.
Li, K., Xu, G., Zhao, G., Dong, Y., and Wang, D. (2011).
Cloud task scheduling based on load balancing ant
colony optimization. In Proceedings of the 6th An-
nual Chinagrid Conference, pages 3–9.
Maheswaran, M., Ali, S., Siegal, H. J., Hensgen, D., and
Freund, R. F. (1999). Dynamic matching and schedul-
ing of a class of independent tasks onto heterogeneous
computing systems. In Proceedings. Eighth Heteroge-
neous Computing Workshop (HCW’99), pages 30–44.
Mell, P. M. and Grance, T. (2011). The NIST definition of
cloud computing. Technical report, National Institute
of Standards & Technology, Gaithersburg, MD, USA.
Oinn, T., Addis, M., Ferris, J., Marvin, D., Senger, M.,
Greenwood, M., Carver, T., Glover, K., Pocock,
M. R., Wipat, A., and Li, P. (2004). Taverna: a tool
for the composition and enactment of bioinformatics
workflows. Bioinformatics, 20(17):3045–3054.
Page, A. J. and Naughton, T. J. (2005). Dynamic task
scheduling using genetic algorithms for heteroge-
neous distributed computing. In Proceedings of the
19th IEEE International Parallel and Distributed Pro-
cessing Symposium.
Russell, N., van van der Aalst, W. M., and ter Hofstede,
A. H. M. (2016). Workflow Patterns: The Definitive
Guide. MIT Press.
Singh, S. and Chana, I. (2016). A survey on resource
scheduling in cloud computing: Issues and challenges.
Journal of Grid Computing, 14:217–264.
Tawfeek, M. A., El-Sisi, A., Keshk, A. E., and Torkey, F. A.
(2013). Cloud task scheduling based on ant colony
optimization. In Proceedings of the 8th International
Conference on Computer Engineering Systems (IC-
CES), pages 64–69.
Thennarasu, S., Selvam, M., and Srihari, K. (2020). A
new whale optimizer for workflow scheduling in cloud
computing environment. Journal of Ambient Intelli-
gence and Humanized Computing.
Topcuoglu, H., Hariri, S., and Min-You Wu (2002).
Performance-effective and low-complexity task
scheduling for heterogeneous computing. IEEE
Transactions on Parallel and Distributed Systems,
13(3):260–274.
Ullman, J. (1975). NP-complete scheduling problems.
Journal of Computer and System Sciences, 10(3):384–
393.
Zaharia, M., Chowdhury, M., Franklin, M. J., Shenker, S.,
and Stoica, I. (2010). Spark: Cluster computing with
working sets. In Proceedings of the 2nd USENIX Con-
ference on Hot Topics in Cloud Computing. USENIX
Association.
DATA 2020 - 9th International Conference on Data Science, Technology and Applications
54
