
Using Mixed Reality as a Tool to Assist Collaborative Activities in
Industrial Context
Breno Keller
a
, Andrea G. Campos Bianchi
b
and Saul Delabrida
c
Department of Computing, Federal University of Ouro Preto, Brazil
Keywords:
Industrial Inspection, User Study, Mixed Reality, Collaborative Activities, Industry 4.0.
Abstract:
The transition process from industry 3.0 to 4.0 results in need to develop interconnected systems as well as
new interfaces for human-computer interaction with these systems since it is not yet possible or allowed to
automate these processes in all industrial contexts fully. Therefore, new technologies should be designed
for the workers’ interaction with the new systems of Industry 4.0. Mixed Reality (MR) is an alternative for
the inclusion of workers, as it allows them to have their perception increased through information from the
industrial environment. Consequently, the use of MR resources as a tool for performing collaborative activities
in an industrial context is promising. This work aims to analyze how this strategy has been applied in the
industry context and discuss its advantages, disadvantages, and characteristics that impact the performance
workers in Industry 4.0.
1 INTRODUCTION
The Fourth Industrial Revolution or Industry 4.0 de-
fines a new level of organization and control over the
production chain aimed at meeting increasingly spe-
cific customer demands (R
¨
ußmann et al., 2015). This
process occurs through the integration of equipment
and systems using technologies such as the Internet
of Things (IoT) and machine learning. Visualization
technologies like Virtual Reality (VR), Augmented
Reality (AR), and Mixed Reality (MR) present them-
selves as promising for making information about
the industrial park available to industry operators and
managers, in particular as an interface to provide in-
formation and support the decision making.
The availability of wearable mixed reality devices
allows the development of advanced interfaces for in-
teraction with industrial equipment, as well as with
other human operators collaboratively. This fact sup-
ports the construction of new computational inter-
faces to perform collaborative activities in the indus-
trial context. Mixed Reality can be defined as the
combination of virtual elements with the real world at
different levels with technologies such as Augmented
Reality and Augmented Virtuality within its limits
a
https://orcid.org/0000-0001-5414-6716
b
https://orcid.org/0000-0001-7949-1188
c
https://orcid.org/0000-0002-8961-5313
(Milgram and Colquhoun, 1999). The Google Glass
1
,
the Microsoft Hololens
2
, the Gear VR
3
and the HTC
Vive
4
are examples of more well-known devices for
MR.
This work focuses on discussing the use of collab-
orative activities in an industrial context. Collabora-
tive activities can be defined as a joint work between
two or more actors to perform an activity (Graham
and Barter, 1999), where these actors could be a hu-
man or a machine combination for the development
of several activities in the production chain. How-
ever, in the current stage of the industry, we still find
contexts where it is not possible to have complete au-
tomation, which means only machines operating in
an integrated manner to perform an activity. Hence
in these contexts, human intervention as part of col-
laboration can be essential for the proper execution of
activities in these specific contexts.
The applications of MR devices in the indus-
try require evaluations from the perspective of HCI
(Human-Computer Interaction) due to the novelty of
1
More information about the device at: bit.ly/2uiMf8L,
accessed on 02/20/2020.
2
More information about the device at: bit.ly/2T2EsEB,
accessed on 02/20/2020.
3
More information about the device at: bit.ly/2SN1qjW,
accessed on 02/20/2020.
4
More information about the device at: bit.ly/32gFalG,
accessed on 02/20/2020
Keller, B., Bianchi, A. and Delabrida, S.
Using Mixed Reality as a Tool to Assist Collaborative Activities in Industrial Context.
DOI: 10.5220/0009792405990605
In Proceedings of the 22nd International Conference on Enterprise Information Systems (ICEIS 2020) - Volume 2, pages 599-605
ISBN: 978-989-758-423-7
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
599

the technologies, their interaction model, and applica-
bility.
This paper aims to discuss aspects related to how
can the use of Mixed Reality enhance collaborative
activities in Industry 4.0. In our methodology, we
present discussions based on learning through theo-
retical reasoning, prototype development, and mixed
reality technology analysis for collaboration. We
hope that the discussions and contributions presented
in this paper will assist as a basis for further re-
searches and practitioners towards the integration of
the human in the processes of Industry 4.0.
This document has the following structure: Sec-
tion 2 presents some concepts related to this work,
and some tools applied to these concepts. Section 3
discusses aspects of the use of handheld and hands-
free devices. Section 4 presents a proof of concept
of the proposed solution for collaborative activities in
the industrial context. Section 5 shows the positive
and negative points of the proposed approach. Finally,
Section 6 presents the conclusions of this work.
2 BACKGROUND
This section presents the concepts of mixed reality
and collaboration. In the end, it presents an overview
of mixed reality technologies that can be used as a
tool to perform collaborative activities in the indus-
trial context.
2.1 Mixed Reality
The concept of Mixed Reality (MR) does not have
a consensus in the research community. Some re-
searches understand MR as a broad classification that
contains differents technologies such as Augmented
Reality (AR), Virtual Reality (VR), and Augmented
Virtuality (AV). In our work, we understand MR as
defined by Milgram and Colquhoun (Milgram and
Colquhoun, 1999) that define MR by characteristics
such as the degree of virtuality and the level of mod-
eling used. The authors also define a spectrum where
the Real Environment (RE) and the Virtual Environ-
ment (VE) are not two distinct entities, but two oppo-
sites poles in the Reality-Virtuality Spectrum. This
spectrum is similar to the Extent of World Knowl-
edge Continuum (EWK), which defines the degree of
modeling that a system knows about a given world,
in other words, how much the system knows about
the rules that describe a given world. In EWK Spec-
trum, on one side, the system does not know any
modeling about the world, and on the other side, the
system known all about the model that describes the
world. Figure 1 shows the relationship between these
two spectra, where the real world is a world with no
known modeling and the virtual world, a world with
fully known modeling.
Reality-Virtuality Spectrum
Extent of World Knowledge Continuum
Real
Environment (RE)
Virtual
Environment (VE)
Non Modeled
World
Modeled
World
Partially modeled world
Figure 1: Reality-Virtuality Spectrum and its relationship
with the Extent of World Knowledge Continnuum adapted
from (Milgram and Colquhoun, 1999).
Between the RE and VE extremes of the Reality-
Virtuality Spectrum, there is the partially modeled
world in which locates technologies such as Aug-
mented Reality (AR) and Augmented Virtuality (AV).
The difference between both technologies is the de-
gree of virtuality in the world with which they work.
Figure 2 presents a representation of the distribution
of these technologies in the spectrum, which contains
technologies that have some degree of virtuality, such
as AR and AV.
Real
Environment
(RE)
Virtual
Environment
(VE)
Augmented
Reality (AR)
Augmented
Virtuality
(AV)
Mixed
Reality (MR)
Reality-Virtuality Spectrum
Figure 2: Reality-Virtuality Spectrum and its technologies
adapted from (Milgram and Colquhoun, 1999).
Although MR is composed of AR and AV technolo-
gies, the boundary between them is blurred because
both use combinations between the virtual and the
real at different levels. However, we can define that
AR extends the real world with virtual resources,
while AV extends the virtual world with real-world re-
sources (Milgram and Colquhoun, 1999). In another
way, closer a technology is to one extreme of the spec-
trum, higher is the difference between an AR and an
AV technology.
2.2 Collaboration
Graham and Barter (Graham and Barter, 1999) de-
fine collaboration as a relationship where two or
more stakeholders bring together resources to achieve
goals that neither party could achieve alone. There
are terms with similar meaning, as (i) partnership,
which Rodal and Mulder (Rodal and Mulder, 1993)
define as an agreement between two or more par-
ties that have agreed to work cooperatively to achieve
shared and/or compatible objectives; and, (ii) coop-
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
600
eration which Hord (Hord, 1986) defines as an aid
to the achievement of specific goals of each party in-
volved. Therefore, these concepts differ from col-
laboration because characteristics of task objective,
since for collaboration, they are shared and common
to both stakeholders. While, for cooperation and part-
nership, they either may be individual or not common
to both stakeholders (Graham and Barter, 1999).
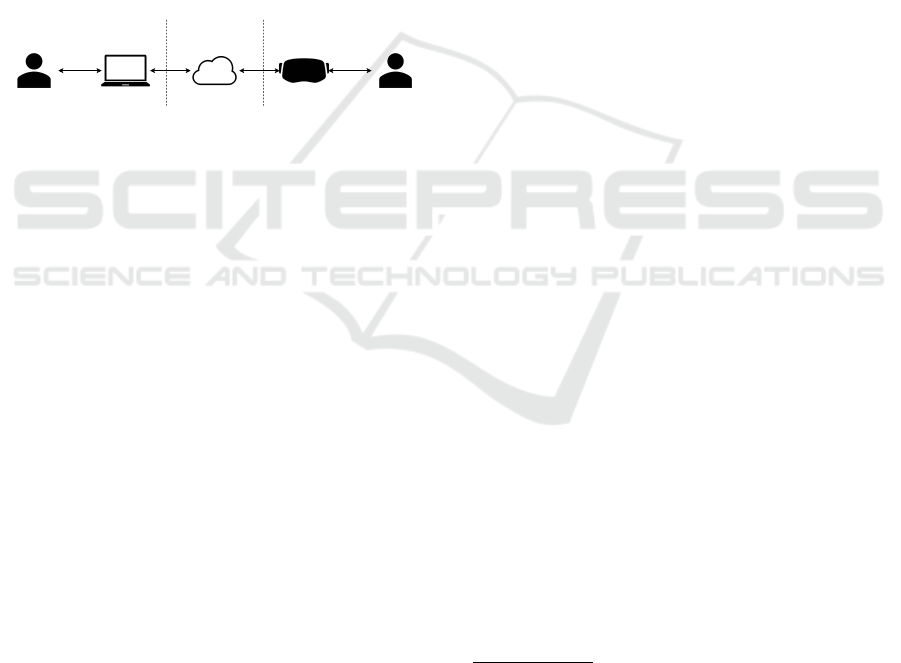
In the industrial context, a collaborative activity is
a partnership between a Actuator and a Consultant
to achieve a common goal, which can be an inspec-
tion, the maintenance of equipment or any other task
in that context. Figure 3 exemplifies how the interac-
tion between the parties can be assisted by technol-
ogy in this context. In this case, Actuator interacts
with the process location and interacts with Consul-
tant via a MR device while Consultant interacts with
Actuator through a desktop.
Task EnvironmentOffice Communication
Layer
Consultant VA ActuatorAR
Figure 3: General Structure of Technology-Assisted Col-
laboration.
As defined by Graham and Barter (Graham and
Barter, 1999), collaboration is a relationship between
parties with a common goal. In the industrial con-
text, these parts can be both people and machines,
thus characterizing three possible collaboration sce-
narios:
• Human - Human Collaboration: Where two
or more people interact to perform an activity,
through communication mechanisms;
• Human - Machine Collaboration: Where one or
more people interact with one or more electronic
equipment to perform an activity, through com-
munication and interaction mechanisms between
them;
• Machine - Machine Collaboration: Where two
or more machines interact with each other to per-
form an activity, using communication protocols
between machines.
The machine-machine collaboration describes a
complete automation environment, where the equip-
ment operates in an integrated manner and indepen-
dent of human interaction to perform its activities.
However, there are processes in the industrial context
that mechanisms are not yet known to provide com-
plete automation. An example of this is the regulation
for piloting UAVs (Unmanned Aerial Vehicles) not al-
lowed in some countries (Nascimento et al., 2017) due
their current legislation does not allow completely au-
tonomous flights. Therefore, for these contexts, ac-
tivities must be performed out through collaboration
between people or between people and machines.
In the scenario shown in Figure 3, the roles of
Consultant and Actuator can be performed by either
a person or a machine.
2.3 Available MR Tools for
Collaboration
In order to achieve the interaction shown in Figure 3,
it is necessary to use tools with MR capabilities. This
section describes examples of technologies available
for collaborating through mixed reality.
Currently, some tools are available on the market,
such as Vuforia Chalk
5
. It is an application for re-
mote assistance, which allows a remote user to inter-
act with a local user through mobile devices. The ap-
plication allows the users to make a video call and
insert 3D elements into the scene that are tracked
by mapping the environment. This mapping means
that three-dimensional markings are drawn on can-
vas and mapped to the real world. In case the local
user moves, the markings remain in the correct posi-
tion. Accelerometer and gyroscope are used to esti-
mate this mapping for smartphones.
Team Viewer Pilot
6
is an AR solution similar to
Vuforia Chalk, however, developed by Team Viewer
7
. Unlike Vuforia Chalk, it does not require two mo-
bile devices to function, requiring only the local user
to have a mobile device. Given that the remote user
can interact through the TeamViewer tool on a com-
puter.
Another model of interaction is demonstrated by
Remote Assist
8
for Microsoft Hololens. Where the
application offers an interaction similar to the appli-
cations already described, that is, it offers visual re-
sources in three dimensions for the interaction. How-
ever, the local user uses an HMD (Head Mounted Dis-
play) to capture, transmit, and display data while us-
ing the equipment.
5
More information at: bit.ly/2VbLARC, accessed on
02/19/2020.
6
More information at: bit.ly/2SLTAai, accessed on
02/19/2020.
7
More information at: bit.ly/2SPqaIq, accessed on
02/21/2020.
8
More information at: bit.ly/3bXifAd, accessed on
02/19/2020.
Using Mixed Reality as a Tool to Assist Collaborative Activities in Industrial Context
601
3 HANDHELD AND
HANDS-FREE TECHNOLOGIES
As described in Section 2, MR is a concept, so there
are several ways to implement this concept. In gen-
eral, there are two types of equipment that offer MR
features, namely the handheld devices, such as smart-
phones, and hands-free devices, such as HMDs. The
handheld devices are those that the user must hold in
their hands for interaction. Most common handheld
devices are smartphones, tablets that have a camera
attached to capture data from the real environment.
Hands-free devices are those that can be attached to
the human body and leave the hands of operators free.
In general, HMDs are wearable equipment such as
helmets and glasses with a real-world view through
screens or optical lenses.
Each of these devices has its pros and cons in-
dividually. However, in a general assessment, the
hands-free devices present greater freedom of move-
ment for the user since the user’s hands are free to
interact with the environment. However, this type
of equipment is usually uncomfortable and presents
a complex interaction model since it does not use
any widely known standard (keyboard or touch-
screen). An example is the interaction model used by
Microsoft Hololens that uses a limited set of gestures.
Other devices like Google Glass use trackpads that
can be located in its structure or presented as an ex-
tension of the equipment in the case of Epson Move-
rio
9
. However, in this case, at least one of the user’s
hands are occupied.
The handheld devices do not offer this freedom
to the user’s hands. However, as they are generally
devices such as smartphones and tablets, users are al-
ready naturalized to the use of this equipment so that
interaction with it and the system is more straightfor-
ward than hands-free devices. Thus, it is possible to
build more complex interaction models with these de-
vices since the user already has some pro-efficiency
with this interaction model.
4 PROOF OF CONCEPT
Based on the technologies and concepts presented in
Sections 2 and 3, a proof of concept of a tool to aid
collaboration in MR is presented in this work. The
development of this proof of concept has two objec-
tives: (i) allow discussion on collaboration aspects
using mixed hands-free reality and (ii) use the devel-
9
More information about the device at: bit.ly/2v5Zave,
accessed on 02/21/2020.
oped tool for experiments on the HCI perspective. Al-
though this is not the focus of this paper, we consider
this to be future work.
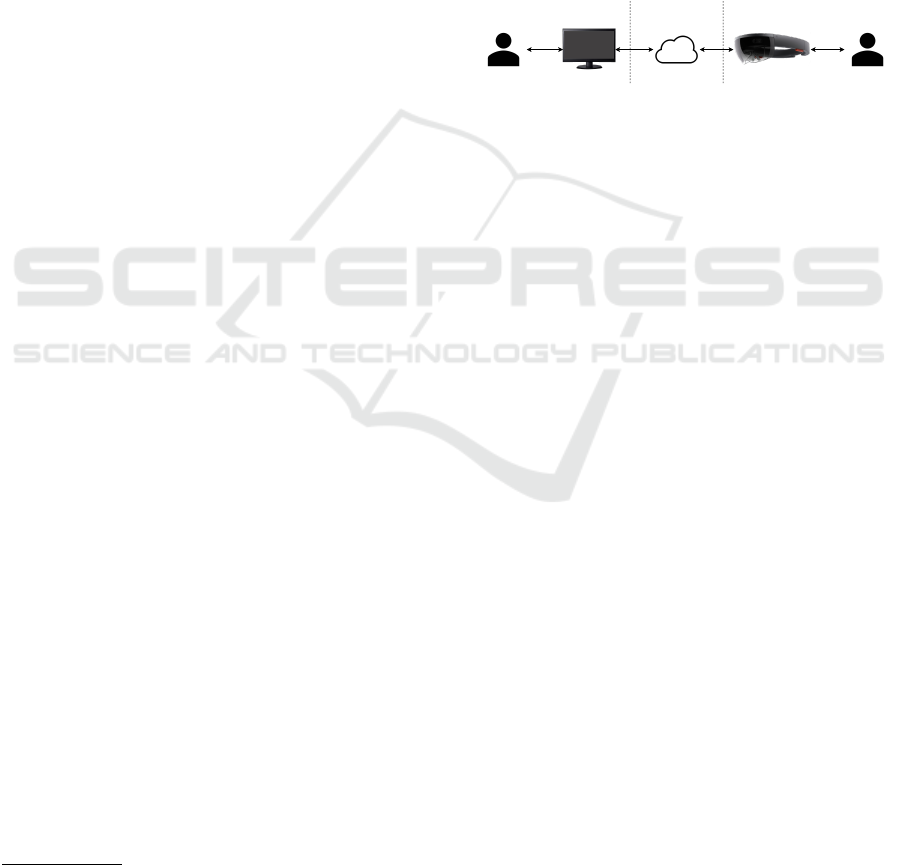
Figure 4 shows the architecture of this tool. It con-
sists of two applications, one for Microsoft Hololens,
whose the primary function is to provide an interface
for user drawing and communication capabilities in
AR. The application was named HoloDraw, how we
refer it from here in this text. Furthermore, an ap-
plication to receive the streaming from the user in
the field, which acts as an AV application to view
the HoloDraw camera capturing and interacts through
this stream. Each application is described in the sec-
tions below.
Task EnvironmentOffice Communication
Layer
HoloDraw
ActuatorHoloDraw DeviceConsultant
Figure 4: Apps Communication Structure.
4.1 HoloDraw
The application developed to run into Microsoft
Hololens was named HoloDraw and was developed
using the Unity environment configured for UWP
(Universal Windows Platform) applications. The ap-
plication has a simple HUD interface that presents all
the necessary information in the user’s view. Besides
that, this interface does not overburden the user with
complex interactions, since the equipment uses ges-
ture recognition, which in general, the user is not used
to it. Therefore, a simple HUD interface is needed
because complex interaction would increase the user
difficult to manipulate the equipment.
Figure 5a shows the application’s base interface.
These images were generated using the Microsoft
Hololens camera so that they may present some dis-
tortions to the actual visualization since they are
treated as fixed elements in a 3D space so that a
change in the user’s position results in a different vi-
sualization of these virtual elements.
The tool has an action bar with three options (from
left to right): drawing, recoloring, and end a line.
Also, a focus indicator was placed in the center of
interface. This indicator works as a reference point
for the center of the application camera operating as a
guide from where the point will be drawn.
Figure 5b shows an example of lines drawn by
user in a belt conveyor. For that, it is necessary to
use the functions available in the application (draw,
recolor, end). Finally, the video available at URL:
bit.ly/2QL65BG presents a complete example of us-
ing HoloDraw, demonstrating how the application
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
602
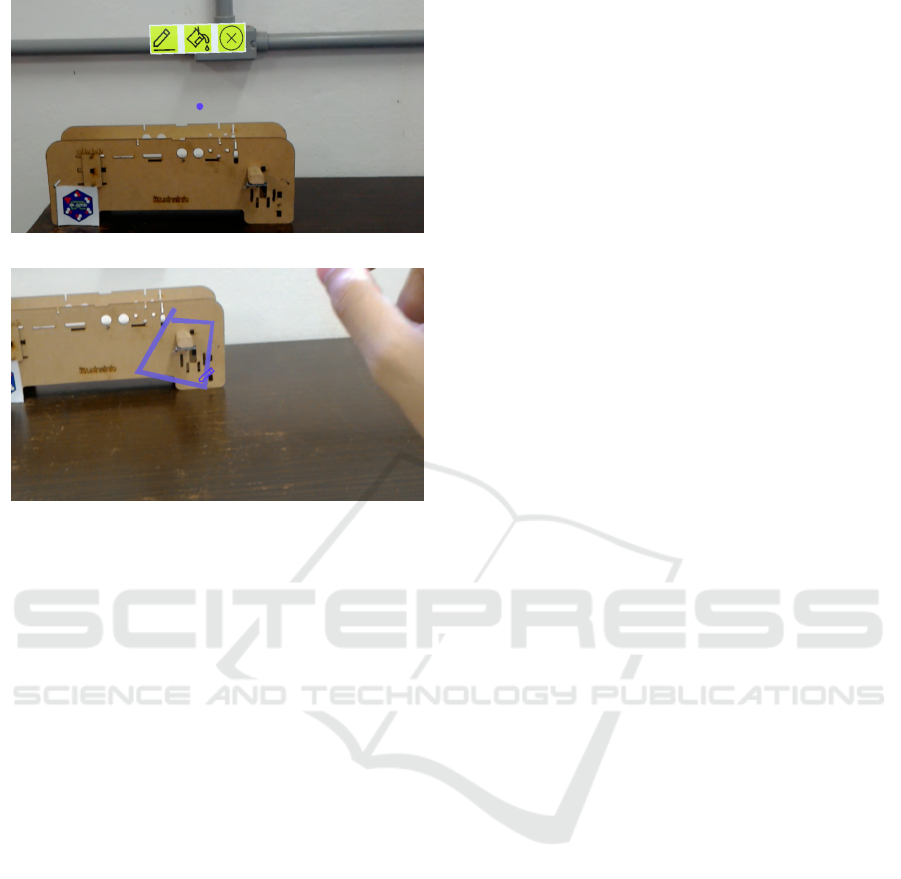
(a) Base App Interface
(b) Highlighting a Region
Figure 5: HoloDraw.
works.
4.2 HoloDraw Device
The software of HoloDraw Device was developed us-
ing the Unity environment configured for Windows
OS applications. Similar to HoloDraw, this applica-
tion was also designed to have fewer elements in the
user’s field of view since all the necessary informa-
tion is generated in the local user’s view and viewed
through the generated stream. In this way, the remote
user can see what the local user is doing and assist
him. Thus, the view of the remote user is similar to
the view of the local user, as shown in Figure 5.
5 DISCUSSION
This section discusses some topics related to the use
of MR in collaborative activities in an industrial con-
text based on the established concepts and the devel-
opment of the proof of concept presented in Section
4.
5.1 MR Devices for Work Safety
The use of handheld or hands-free devices for MR in-
teraction can impact workplace safety issues. Since
the insertion of a new element in the process implies
that this element will not pose any new risk for the
user. However, the devices used for this purpose do
not make it clear as to their suitability for international
and local safety standards. Thus, it is necessary to de-
velop or adapt those devices so they can be classified
as Personal Protective Equipment (PPE) without gen-
erating new risks to the user.
Another factor that needs to be observed about the
use of hands-free devices is the type of see-through
display (Azuma, 1997) that the equipment presents.
If it is a video see-through display, in case of equip-
ment failure, the user will be completely blind in a
hazardous environment. So for the Actuator context
(as shown in Figure 3), it is safer to use an optical
see-through device to avoid this type of problem.
5.2 Interaction Mediated by MR
Devices
Another aspect affected by technology is that the im-
plementation of these solutions also impacts the user’s
ability to solve problems. Seeing that allows users to
be more efficient because these devices can reduce the
ambiguity of oral communication and offer better re-
sources for this interaction. Reddy et al. (Reddy et al.,
2015) demonstrate that the use of a shared 3D model
of a car reduces the problems generated by the am-
biguity of verbal communication in carrying out an
inspection task to trigger car insurance.
Furthermore, it is necessary to analyze these solu-
tions in addition to the quantitative gains. Since in ad-
dition to bringing benefits, these solutions must also
be well accepted by their users. Works like Datcu
et al., Orts-Escolano et al., and Kim et al. (Datcu
et al., 2013; Orts-Escolano et al., 2016; Kim et al.,
2019) have different formats of interaction between
their users. However, most of these interaction mod-
els are different from habitual (keyboards or touch-
screens). Therefore, these models need to be evalu-
ated from the user’s perspective, trying to ensure that
the user has a good experience and reducing the im-
pact of inserting these tools in the context of the ac-
tivity performed.
Therefore, it is possible to use different evaluation
methods, as demonstrated in the works of Datcu et al.,
Orts-Escolano et al and Kim et al. (Datcu et al., 2013;
Orts-Escolano et al., 2016; Kim et al., 2019), which
use techniques such as SUS, SMEQ, Co-presence,
NASA-TLX, and AR Questionnaire.
Using Mixed Reality as a Tool to Assist Collaborative Activities in Industrial Context
603

5.3 MR System Development
The popularization and diversification of MR devices
and technologies in recent years has led to the de-
velopment of several SDKs (Software Development
Kit) for AR and development environments to meet
this demand. Within this variety, these technologies
can be divided into three groups: (i) Android-based
systems, such as applications for Epson Moverio; (ii)
systems based on SDKs for AR, such as applica-
tions developed using Vuforia or ARToolKit; and (iii)
other system architectures, such as applications for
Microsoft Hololens.
However, even with this technology variety, de-
velopment environments such as Unity can be ad-
justed to work with these different technologies, such
as importing an SDK or an application parser in the
Unity framework for the target architecture. Some
works in the literature (Piumsomboon et al., 2019;
Kim et al., 2019; De Pace et al., 2019; Choi et al.,
2018) use Unity to generate applications for Mi-
crosoft Hololens, Oculus Rift, Smartphones, Note-
books, and other types of HMDs.
Although this cross-platform behavior from Unity
brings some advantages, the unification of these tech-
nologies in a single environment also brings some
problems. At the development level, a collaborative
application that needs to run on two different plat-
forms can present completely different levels of dif-
ficulties from each other. As an example, the proof
of concept presented in Section 4 developed two ap-
plications, one for Microsoft Hololens, using Unity
to UWP platform, and one to the Windows platform.
However, even with both devices running on similar
Windows architectures, the applications are different
and, in turn, generate several compatibility problems
caused either by specific equipment characteristics or
because of the adaptation that Unity performs to ex-
port these applications.
Also, it is necessary to consider the original pur-
pose of the Unity platform is game development,
which allows the platform to be well adapted for the
development of VR applications. However, for the
MR context, it ends up generating problems due to
the APIs and interactions with the development envi-
ronment itself.
5.4 Why Use or Not Use 3D Mapping
One of the main situations when imagining the use
of MR systems is the ability of virtual elements to
behave as real elements through 3D mapping. So,
in general, 3D mapping is used when the virtual ob-
jects need to behave and interact with the environ-
ment. However, if the interface is something similar
to a fixed HUD, the mapping is optional.
Despite, obtaining a good result when using a 3D
mapping is directly related to the context of use and
the equipment used. Since the mapping quality is re-
lated to the devices’ sensors quality used to capture
and update the map and the characteristics of the envi-
ronment. For example, a teaching laboratory environ-
ment for chemistry where are several benches, piping
for transporting liquids and gases, and other charac-
teristic structures. If this environment is mapped, the
noise level generated by the structures ends up limit-
ing or even hindering the use of MR devices. When
visualizing this situation in an industrial environment
whose noise is much higher than a teaching labora-
tory, it must take great care so that the noise does not
prevent the use of the application.
Besides, not all types of MR devices cope well
with the idea of 3D mapping. Devices like Epson
Moverio and Google Glass are built like glasses, but
unlike Microsoft Hololens, they do not have a fully
immersive screen, which, although it is possible to
use applications such as 3D mapping ends up mak-
ing it impossible to use this technology well. Thus,
this type of equipment ends up using a game HUD-
style interfaces, where they present their information
in the user’s peripheral field of vision without directly
interfering with the world view, thus guaranteeing the
user’s safety.
6 CONCLUSION
This work presented a proof of concept and a discus-
sion about the pros and cons of using MR as a tool
to assist collaborative tasks in the context of industry
4.0. We can see that there are some possible solutions
developed by both the market and the academy. How-
ever, it is still necessary to develop and evaluate these
solutions from the users’ point of view so that it is
possible to insert these solutions in the industrial en-
vironment, thus bringing benefits to both the worker
and the production process.
ACKNOWLEDGEMENTS
The authors thank Coordenac¸
˜
ao de Aperfeic¸oamento
de Pessoal de N
´
ıvel Superior (CAPES), Fundac¸
˜
ao
de Amparo
`
a Pesquisa de Minas Gerais (FAPEMIG-
APQ-01331-18), Instituto Tecnol
´
ogico Vale (ITV)
and Vale S.A. (No.23109.005575/2016-81 and No.
23109.005909/2018-89) and the Federal University of
Ouro Preto for supporting this research.
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
604

REFERENCES
Azuma, R. T. (1997). A survey of augmented reality.
Presence: Teleoperators and virtual environments,
6(4):355–385.
Choi, S. H., Kim, M., and Lee, J. Y. (2018). Situation-
dependent remote AR collaborations: Image-based
collaboration using a 3D perspective map and live
video-based collaboration with a synchronized VR
mode. Computers in Industry, 101:51–66.
Datcu, D., Lukosch, S., and Lukosch, H. (2013). Compar-
ing Presence, Workload and Situational Awareness in
a Collaborative Real World and Augmented Reality
Scenario. In IEEE ISMAR Workshop on Collabora-
tion in Merging Realities (CiMeR), pages 1–6. IEEE.
De Pace, F., Manuri, F., Sanna, A., and Zappia, D. (2019). A
Comparison Between Two Different Approaches for
a Collaborative Mixed-Virtual Environment in Indus-
trial Maintenance. Frontiers in Robotics and AI, 6:18.
Graham, J. R. and Barter, K. (1999). Collaboration: A
Social Work Practice Method. Families in Society,
80(1):6–13.
Hord, S. M. (1986). A synthesis of research on or-
ganizational collaboration. Educational leadership,
43(5):22–26.
Kim, S., Lee, G., Huang, W., Kim, H., Woo, W., and
Billinghurst, M. (2019). Evaluating the Combina-
tion of Visual Communication Cues for HMD-based
Mixed Reality Remote Collaboration. In Proceed-
ings of the 2019 CHI Conference on Human Factors
in Computing Systems - CHI ’19, pages 1–13. ACM.
Milgram, P. and Colquhoun, H. (1999). A taxonomy of real
and virtual world display integration. Mixed reality:
Merging real and virtual worlds, 1:1–26.
Nascimento, R., Carvalho, R., Delabrida, S., Bianchi, A. G.,
Oliveira, R. A. R., and Garcia, L. G. (2017). An inte-
grated inspection system for belt conveyor rollers ad-
vancing in an enterprise architecture. In ICEIS 2017 -
Proceedings of the 19th International Conference on
Enterprise Information Systems, pages 190–200.
Orts-Escolano, S., Dou, M., Tankovich, V., Loop, C., Cai,
Q., Chou, P. A., Mennicken, S., Valentin, J., Pradeep,
V., Wang, S., Kang, S. B., Rhemann, C., Kohli, P.,
Lutchyn, Y., Keskin, C., Izadi, S., Fanello, S., Chang,
W., Kowdle, A., Degtyarev, Y., Kim, D., Davidson,
P. L., and Khamis, S. (2016). Holoportation: Virtual
3D Teleportation in Real-Time. In Proceedings of the
29th Annual Symposium on User Interface Software
and Technology - UIST ’16, pages 741–754. ACM.
Piumsomboon, T., Dey, A., Ens, B., Lee, G., and
Billinghurst, M. (2019). The Effects of Shar-
ing Awareness Cues in Collaborative Mixed Reality.
Frontiers in Robotics and AI, 6:1–18.
Reddy, K. P. K., Venkitesh, B., Varghese, A., Narendra,
N., Chandra, G., and Balamuralidhar, P. (2015). De-
formable 3D CAD models in mobile augmented re-
ality for tele-assistance. In 2015 Asia Pacific Con-
ference on Multimedia and Broadcasting, pages 1–5.
IEEE.
Rodal, A. and Mulder, N. (1993). Partnerships, devolution
and power-sharing: issues and implications for man-
agement. Optimum, 24:27–27.
R
¨
ußmann, M., Lorenz, M., Gerbert, P., Waldner, M., Justus,
J., Engel, P., and Harnisch, M. (2015). Industry 4.0:
The Future of Productivity and Growth in Manufactur-
ing Industries. Boston Consulting Group, 9(1):54–89.
Using Mixed Reality as a Tool to Assist Collaborative Activities in Industrial Context
605
