
What3Words Geo Encryption: An Alternative Approach to Location
based Encryption
Julian Dreyer and Ralf T
¨
onjes
Faculty of Engineering and Computer Science, University of Applied Sciences Osnabr
¨
uck, Osnabr
¨
uck, Germany
Keywords:
Identity based Encryption, Location Based Encryption, What3Words, GPS.
Abstract:
Identity Based Encryption (IBE) is a steadily emerging field of research in the cryptographical domain. A
special flavor of IBE called Location Based Encryption (LBE) includes a given location attribute to add ad-
ditional access control to the encrypted entity. The main goal is to allow an entity to decrypt the ciphertext
only and only if the correct location information is provided. This allows to control the access based on the
position of the data user. Existing solutions for LBE make use of the conventional Global Positioning System
(GPS). Though, conventional GPS solutions are known to be influenced by an artificially added error, result-
ing in inaccuracy of the location data. This will consequently require the LBE scheme to include a level of
tolerance, as the GPS coordinates may slightly diverge between different points in time. In order to mitigate
this problem by design, an alternative approach to LBE is proposed to add additional tolerance. The approach
presented in this paper makes use of the What3Words location system, which offers the required tolerance for
the decryption and thereby mitigating the problem of GPS inaccuracy. A following study then evaluates the
real-world performance of the new encryption algorithm.
1 INTRODUCTION
This paper proposes a new method of implementing
a Location Based Encryption (LBE) scheme, which
represents a special variation of Identity Based En-
cryption (IBE). In general, IBE can be used to add an
additional layer of access control, onto a previously
encrypted plaintext. With the introduction of LBE,
the access control is implemented by using the loca-
tion of a receiver. The main goal is to restrict the abil-
ity to decrypt a ciphertext only to receivers at a des-
ignated position. Existing proposals make use of the
Global Positioning System (GPS) and use the mech-
anism within a Digital Rights Management (DRM)
Engine. A film production studio for instance, could
make use of LBE to protect the digital versions of
the produced films, thus enabling only mobile users
to consume the content only at a specific location.
Other forms of access control, e.g. in the domain of
the Internet of Things (IoT) are possible.One inherent
problem of the GPS is the artificial inaccuracy of the
signal. Therefore, approaches are need to cope with
the varying coordinates by introducing a method to
tolerate inaccurate coordinates. This work is propos-
ing a novel way of approaching the previously de-
scribed problem by utilizing the What3Words local-
ization service.
The rest of the paper is organised as follows: sec-
tion 2 introduces various existing approaches of mit-
igating the inaccuracy of the GPS and implementing
a LBE scheme. It also shows a study, which indicates
the accuracy of modern GPS receivers in order to later
evaluate the real-world usage potential of the newly
proposed LBE scheme. Said scheme is briefly de-
scribed as well as the What3Words service in section
3. In section 4, an experimental study is conducted
to evaluate the real-world tolerance of the newly pro-
posed LBE scheme. Afterwards, the results are eval-
uated in section 5 and compared to the results of the
GPS receiver accuracy study, mentioned in section 2,
thus indicating the real-world application potential of
the encryption scheme.
2 RELATED WORK
The Location Based Encryption (LBE) is a widely re-
searched field within the Identity Based Encryption
domain. Thus, there are already proposals for ef-
ficient algorithms for encryption like the Location-
Dependent Data Encryption Algorithm (LDEA), first
proposed by Liao and Chao (Liao and Chao, 2008).
Dreyer, J. and Tönjes, R.
What3Words Geo Encryption: An Alternative Approach to Location based Encryption.
DOI: 10.5220/0009791904450452
In Proceedings of the 5th International Conference on Internet of Things, Big Data and Security (IoTBDS 2020), pages 445-452
ISBN: 978-989-758-426-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
445

The algorithm makes use of a GPS coordinate, con-
sisting of the latitude and longitude of the receiver.
It ensures confidentiality by including well known
and tested symmetric encryption algorithms like the
Data Encryption Standard (DES), the Advanced En-
cryption Standard (AES) or the triple-DES and hash-
ing algorithms like the Message Digest Algorithm 5
(MD5). Though, due to advanced security research
by Xie et.al. (Xie et al., 2013), the MD5 hash al-
gorithm is considered as not reliable anymore and
more sophisticated ones like the Secure Hashing Al-
gorithm (SHA) should be used. Additionally, the DES
algorithm in its plain form is vulnerable to known-
ciphertext attacks. Due to its key size of only 56 Bits
(NIST, 1999), an attacker is able to perform a brute
force attack on the encryption keys with at most 2
56
tries (Biham and Shamir, 1991). With further inves-
tigative cryptanalysis methods described by Matsui
(Matsui, 1993), the conventional DES cipher can be
broken in up to 2
29
tries. With modern and specialized
hardware at hand, an attacker is able to decrypt a DES
encrypted ciphertext within a feasible amount of time.
Thus, the proposed usage of DES in its plain form
is not recommended for modern encryption schemes.
Liao and Chao also showed potential future research
on their algorithm, including the replacement of the
aforementioned cipher suites and concepts, thereby
stressing the modularity of the LDEA algorithm itself
(Liao and Chao, 2008).
Another approach to Location Based Encryption
is given by Scott and Denning (Scott and Denning,
2003), which is focusing on the application of Geo
Encryption on digital film licensing and DRM pro-
tection. The main goal is to mitigate the problem of
unauthorized users being able to capture a film signal,
duplicating it and sharing it illegally. Geo Encryption
would allow film producers to lock their films with
a GeoLock Key, which they would only distribute to
cinemas or authorized users in general. Only these
key holders will then be able to decrypt the film in this
scenario. The distribution of the key would not be re-
quired, because the location of the cinema requesting
access might be known to the film producer. The film
can then be encrypted for only the cinema’s coordi-
nates. Thus, a preceding key exchange is not neces-
sary. Scott and Denning propose a new geo encryp-
tion algorithm called ”GeoCodes GeoEncryption Al-
gorithm” (Scott and Denning, 2003), which involves
the recipient’s location coordinates, as well as the ve-
locity and time of the recipient. The algorithm also
includes a Position Velocity Time (PVT) → GeoLock
Mapping Function, which attempts to accommodate
for the inherent error and inaccuracy of the GPS con-
sumer signal. The function works by establishing a
three-dimensional mapping of latitude, longitude and
time onto a hexadecimal value. The underlying ma-
trices can be scaled to accommodate for an arbitrar-
ily accurate receiver. By including more dimensions
into the mapping function, more entropy will be gen-
erated. In order to hinder potential attackers to extract
the GeoLock values from the matrices, the use of a
cryptographic hash function is recommended.
The civil consumer GPS signal is known to be in-
fluenced by an artificially added inaccuracy. There-
fore, Wing et al. (Wing et al., 2005) conduced a field
study to evaluate the positional accuracy of consumer
GPS devices. They have set up different testing en-
vironments and chose six different GPS receivers by
well-known manufacturers, which were then be ex-
amined regarding their accuracy. The devices them-
selves make use of the differential GPS algorithm
(Van Sickle, 2015), that involves the difference be-
tween two positions, to further decrease the error of
the GPS Signal. The study shows that the average er-
ror of the GPS receivers lies within a 4.1m range with
a standard deviation of 1.47m, thus concluding that
even on modern consumer GPS receivers an error of
four to five meters is to be expected.
3 CONCEPT AND METHODS
The intention of this paper is to propose an ex-
tended form of the LDEA algorithm (Liao and Chao,
2008), which not only involves an improved crypto-
graphic cipher suite, but also makes use of a differ-
ent approach to the problem of GPS inaccuracy. The
”What3Words” service provided by the what3words
Ltd. (what3words Ltd., 2019b) offers an alternative
localization approach to the GPS. By including this
service into the LDEA algorithm (Liao and Chao,
2008), an intrinsic theoretical tolerance of nine square
meters can be achieved, thus solving the GPS inaccu-
racy problem of the LDEA algorithm in its plain vari-
ant. The given theoretical tolerance lies below the av-
erage error of consumer GPS receivers of 4.1m (Wing
et al., 2005). Therefore, an experimental study will
evaluate the real-world tolerance of the newly intro-
duced What3Words mechanism. The following sub-
chapters will describe the What3Words service, intro-
duce the newly proposed LDEA* algorithm in detail
and give an evaluation of its real-world application
potential.
3.1 What3Words Service
The What3Words service works by dividing the
earth’s surface into three by three meter squares and
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
446
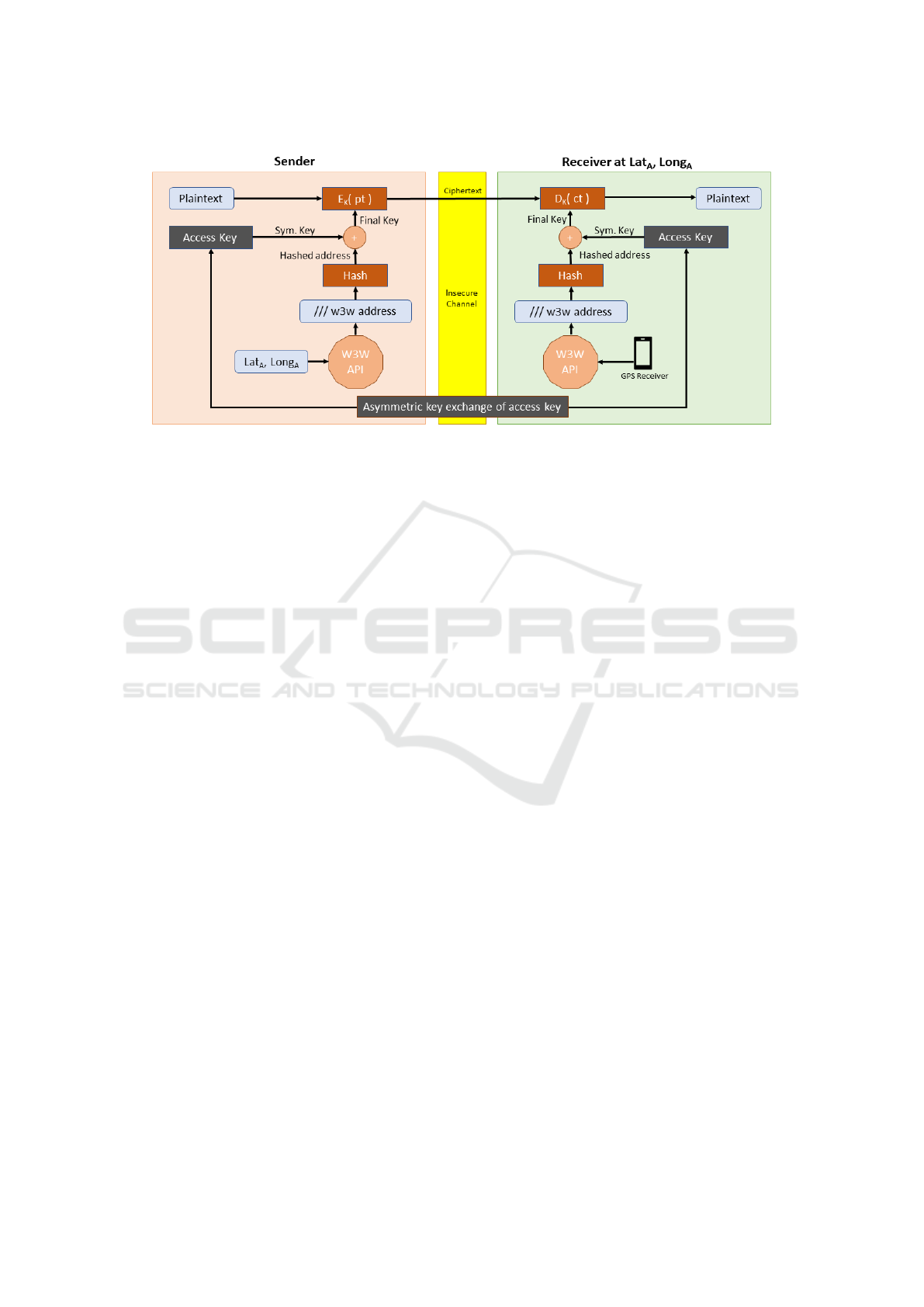
Figure 1: The LDEA* algorithm.
giving each of these squares a unique three word ad-
dress. The address itself is separated by dots and
involves human readable words from a dictionary
(what3words, 2019), e.g. English. There exists a de-
veloper API capable of converting regular GPS coor-
dinates into a unique What3Words address. A exam-
plary What3Words address can look like the follow-
ing:
/// filled.count.soap
In order for the user to easily identify an address in
the What3Words format, three slashes are prepended
to the address. The service is designed to simplify
the use case of sharing a location with other people
or with a navigation system. By making use of hu-
man readable and pronounceable words, unlike reg-
ular GPS coordinates, which make use of multi digit
numbers, voice recognition systems can easily grasp
the desired address. Additionally, the addresses are
easier to remember as their structure is made easy
to read for humans. Unlike the dot-separated words
might suggest, the addresses themselves do not fol-
low a hierarchical structure (Macgregor, 2019). This
is due to the intended use case of automobile navi-
gation systems and especially voice recognition sys-
tems. If the addresses would follow a hierarchical
scheme rather than randomly assigned words like they
do now, misinterpretations by wrong voice recogni-
tion could occur, leading to a wrong location being
determined. This would impact the usability of the
whole system. For this reason the developers decided
on a random assignment of words for each address.
Additionally, they focused on words that are easily
pronounceable by humans (Day, 2019), which in-
creases the overall usability of the system even more.
When using the service, a developer can access the
freely available online API provided by what3words
or even request an offline SDK. Though, the offline
SDKs are only distributed to contractors who pay
a monthly fee. The What3Words developers claim,
that the offline SDK, which involves an offline ver-
sion of the address database in conjunction with either
a C++, Java or Mobile Library, only requires about
5 Megabytes of storage (what3words Ltd., 2019a).
Thus, an offline version of the API would even be
suitable for small IoT devices, which are not able to
communicate with the online API directly and possess
limited hardware resources.
Generally, the algorithm behind the addressing
of individual squares is not transparent to the user.
By the definition of the aforementioned concept, a
theoretical tolerance of about nine square meters
can be achieved (what3words, 2019). By introduc-
ing the What3Words service to the LDEA algorithm
and thereby exchanging the GPS coordinates with a
What3Words address, an intrinsic tolerance is estab-
lished. Thus, the problem of the GPS inaccuracy is
inherently resolved. Given an IoT device, which in-
cludes a low-cost GPS receiver and online capabili-
ties, the What3Words service would be able to cope
with the inaccuracy of the GPS receiver and offering
a LBE encryption option.
3.2 LDEA* Algorithm
The LDEA* algorithm represents an encryption
scheme, that allows arbitrary data to be symmetri-
cally encrypted and location locked at the same time.
Due to its underlying similarities with the LDEA al-
gorithm first described in (Liao and Chao, 2008), an
asterisk has been added, indicating its new function-
ality in combination with updated crypto algorithms.
The LDEA* algorithm, the process shown in Fig-
What3Words Geo Encryption: An Alternative Approach to Location based Encryption
447

Figure 2: Split-Hash-Combine method.
ure 1 will be executed. At first, the sender needs to
determine the location of the receiver, who is intended
be able to decrypt the message later on. Once the
sender knows the receiver coordinates (Lat
A
, Long
A
),
these will be sent to the What3Words API in or-
der to convert them into a What3Words address. As
there exist either the offline SDK or online API of
the What3Words service, the implementation of the
What3Words component may vary accordingly. Due
to varying lengths of the addresses, a hash function
with a defined output length (e.g. 64 Bytes using the
SHA-512 hash algorithm) is being applied onto the
What3Words address. The resulting hashed address
is then XORed with a randomly generated symmet-
ric key. Following a similar scheme like the original
LDEA key generation by Liao and Chao (Liao and
Chao, 2008), the randomly generated key is of half
the size of the hashed address. In order to XOR both
parts, the hashed address is split in half. Both result-
ing halfes of the hashed address then are XORed sepa-
rately with the randomly generated key. The final key
is then produced by combining the keys again to re-
gain the original length of the hashed address. Notice
that the length of the randomly generated key needs
to be half of the hashed address length. This whole
method is shown in Figure 2.
Once the final key is generated, it is supplied to the
symmetric block cipher encryption algorithm. Here,
the AES-256 in Galois/Counter Mode (GCM) mode
was chosen due to its efficiency and it being the stan-
dard symmetric encryption algorithm standardized by
the National Institute for Standards and Technology
(NIST) (Farooq and Aslam, 2017). In its plain variant,
the AES block cipher only ensures confidentiality but
no authenticity. Therefore, a modern Authenticated
Encryption with Associated Data (AEAD) mode like
GCM is used. The resulting ciphertext does not only
contain the encrypted plaintext of the sender, but also
a set of unencrypted associated data items. The asso-
ciated data ensures the authenticity of the encrypted
data, because it is being included within a Message
Authentication Code (MAC). Therefore, the integrity
and authenticity of the received data can be directly
evaluated. Thus, the overall security requirements for
a secure and authentic data exchange are satisfied.
The most notable disadvantage of symmetric
block ciphers is its intrinsic demand for both parties
to share the same key for both de- and encryption.
In general, the assumption of both parties knowing
each other is often not valid. Thus, an asymmetric
key exchange is needed beforehand. ”Hybrid Encryp-
tion” utilizes asymmetric encryption to share a sym-
metric block cipher key. The LDEA* algorithm rec-
ommends to share the randomly generated key either
by Diffie Hellman Ephemeral (DHE) or RSA key ex-
change (Rountree, 2011). It is to be noted that this
randomly generated key alone is not enough to de-
crypt the cipher-text. The receiver also needs to per-
form the key derivation process described in Figure 2.
For the decryption, the receiver needs to gener-
ate the access key with his own What3Words ad-
dress.In order to generate the final key, the receiver
makes use of his GPS coordinates, which are deter-
mined with a tamper-proof GPS receiver. The re-
sulting coordinates (Lat
A
, Long
A
) are passed to the
What3Words API, which returns a valid What3Words
address. Then the address undergoes the Split-Hash-
Combine method (s. Figure 2) resulting in the fi-
nal key for the decryption. With the AES encryption
algorithm in GCM mode, a receiver can also deter-
mine, whether a ciphertext was correctly deciphered
by checking the hash of the resulting plaintext with
the associated data. Thus, the receiver can immedi-
ately determine, whether the message was intended to
be decrypted at his position, assuming the symmetric
key was correctly shared beforehand. This allows a
sender to broadcast data to multiple receivers, while
only one of them being able to decrypt the data, as-
suming the all receivers hold the same symmetric key.
The overall method of mapping the GPS coordinates
into a predefined rectangle has also been described
by Scott and Denning (Scott and Denning, 2003).
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
448
Though their method requires a more computationally
intense workflow in order to generate the GeoLock
Keys, making it infeasible for small scale devices with
restricted hardware resources. This problem is miti-
gated by the unique mapping of the What3Words ser-
vice intrinsically. Considering the results of Wing et
al. (Wing et al., 2005), a tolerance level of three me-
ters, which is theoretically given by the LDEA* algo-
rithm, is below the expected accuracy range of con-
sumer GPS equipment, making it suitable for small
scale devices. As stated by What3Words, the size of
the offline SDK version of the What3Words service
only packs 5 Megabytes in size, thus making it feasi-
ble to store it on the local memory of the device. Even
with limited hardware resources, this approach can be
implemented efficiently.
3.3 Potential Issues
The LDEA* algorithm offers a theoretical tolerance
of ±1.5m for a consumer GPS receiver with ex-
pectable inaccuracies. This theoretical tolerance level
is only fitting for the best-case assumption, which
would resemble a GPS point, that is located in the
center of the square on the What3Words world map.
The GPS coordinates may shift arbitrarily in any di-
rection with the same amount of tolerance. This can
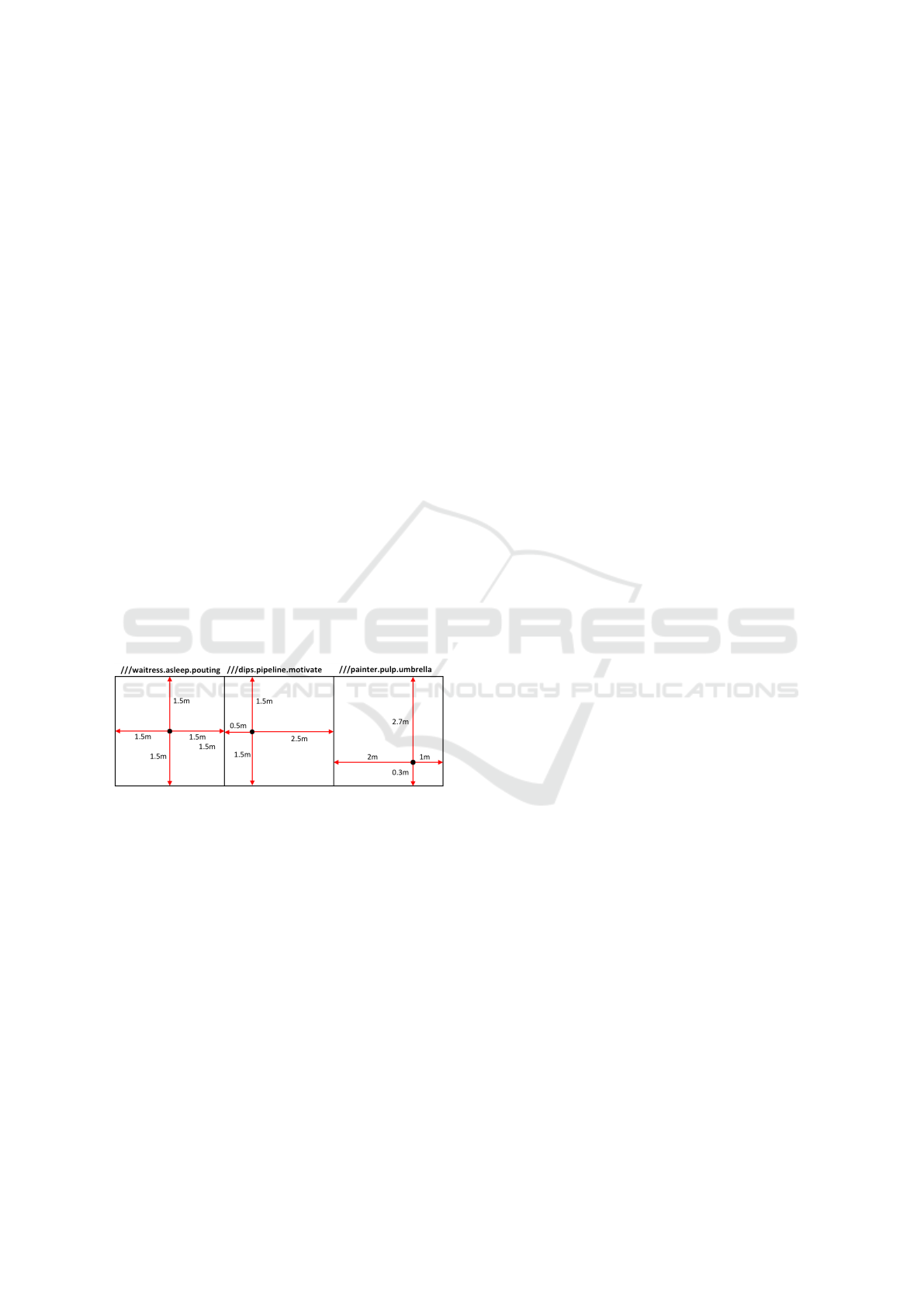
be seen in the first square of Figure 3.
Figure 3: Varying tolerances due to different point loca-
tions.
In general, it cannot be assumed that the point
lies within the center but rather at a uniformly dis-
tributed location within the square. Thus, different
locations of the point within a given square are pos-
sible and most likely. In a real-world scenario, a po-
tential receiver, who’s location lies on the edge of a
square, might be unable to decrypt the message due to
a square change, if the GPS receiver has inaccuracies.
Considering Figure 3 again, this would be the case if
the receiver is on the marked point within the second
square and owns a GPS receiver with an inaccuracy
rating of up to one meter. If a sender would encrypt
a message for the address ”///dips.pipeline.motivate”
and the receiver would determine his location with
one meter inaccuracy to the left, the What3Words API
could return the address ”///waitress.asleep.pouting”,
thus leading to the receiver being unable to decrypt
the message. Though, the distribution of tolerances
within a given square is always three meters, consid-
ering the designed dimensions of the squares within
the What3Words world map. Regarding these as-
sumptions, an experimental study will be conducted
to identify the real-world tolerance of the LDEA* al-
gorithm. With the design principles at hand, one can
hypothesize that the LDEA* algorithm will not ex-
ceed the tolerance level of three meters.
3.4 Proof of Concept
In order to leverage an experimental study to evalu-
ate the capabilities and the tolerances, the LDEA* al-
gorithm is implemented in a high level programming
language. The fundamental use case for the experi-
mental study involves two parties. The sender pro-
duces arbitrary data which gets encrypted using the
LDEA* algorithm. Consequently, the receiver’s GPS
coordinates are needed by the sender, to successfully
encrypt the data for the desired receiver. These get
provided on runtime. The data itself is being sent
via MQTT as the underlying communication proto-
col. The receiver then attempts to decrypt the data,
using the LDEA* algorithm with the employment of
his own GPS coordinates. If the access key, as well
as the location of the receiver are correct, the data is
decrypted successfully by the receiver.
In order to facilitate the asymmetric key exchange
between the two parties over MQTT, which itself does
not encrypt any data (Singh et al., 2015), RSA was
chosen. The receiver and the sender both own a pri-
vate and public key pair. The sender generates a new,
random symmetric key which will then be encrypted
with RSA and the previously broadcasted public key
of the receiver. The sender then transmits the en-
crypted symmetric key over the insecure network to
the receiver who will be able to decrypt the symmetric
key with his own private RSA key. The key exchange
process is then finalized and the LDEA* algorithm it-
self can be executed.
4 EXPERIMENTAL STUDY
This chapter examines the real-world performance of
the LDEA* algorithm. The hypothesized outcome of
a tolerance level of three meters will therefore be val-
idated.
What3Words Geo Encryption: An Alternative Approach to Location based Encryption
449
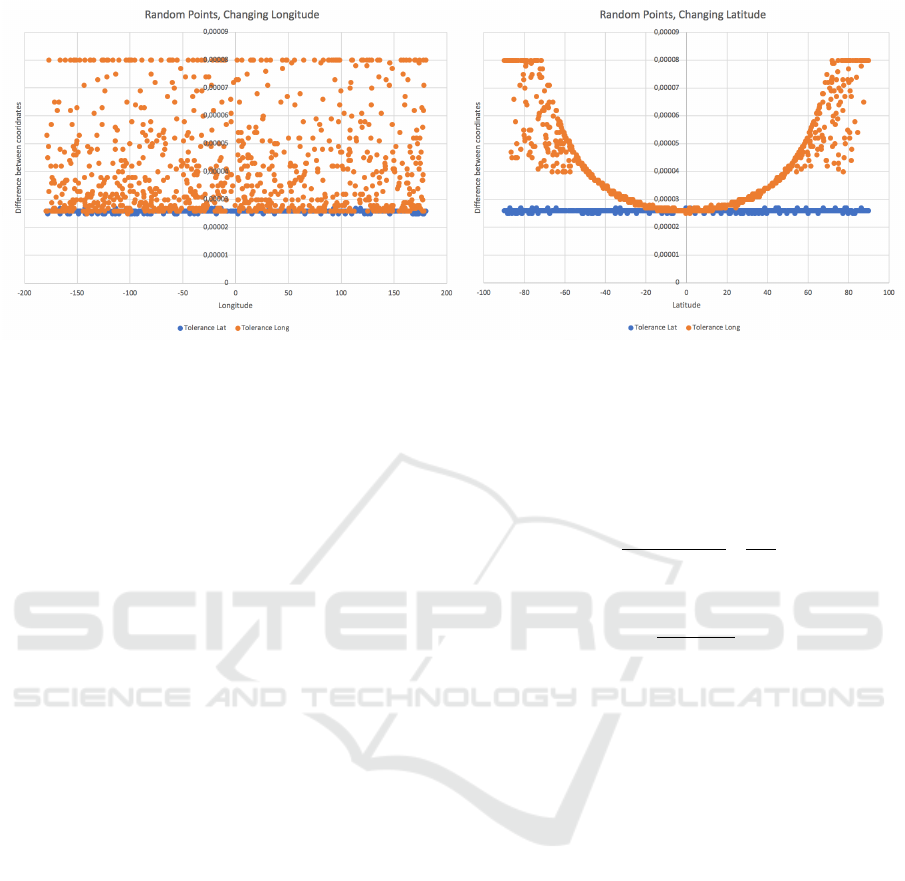
Figure 4: The resulting tolerance in latitude and longitude.
4.1 Methodology
In order to get a measurement for the tolerance level
of a given point, a custom testing method has been im-
plemented. The tolerance in this case is defined as the
distance between the opposite edges within a square,
either in vertical or horizontal direction. Therefore,
randomly chosen points on the world map undergo a
custom testing methodology. Each point P
x
possesses
a unique GPS coordinate pair (Lat
x
, Long
x
). For most
consumer GPS receivers, the accuracy of the floating
point numbers do not exceed 1.0 ∗ 10
−7
(Wing et al.,
2005). Therefore, this scale can be set as the step size
for the following algorithm:
1. A new random point P
x
at (Lat
x
, Long
x
) is being
generated from a uniform distribution.
2. The point is shared amongst sender and receiver.
Both set the point as their own location for de-
cryption and encryption.
3. The sender encrypts the points latitude and lon-
gitude with the LDEA* algorithm and sends them
to the receiver. A decryption should be successful,
as the receiver knows the position of the point.
4. The sender subtracts an amount of 1.0 ∗10
−7
from
the coordinate and encrypts the new data for the
resulting coordinate. He then sends the message
to the receiver for decryption.
5. The sender repeats the previous step for each
direction until a min
Lat
, min
Long
, max
Lat
and
max
Long
value are reached. At some point, the
receiver will not be able to decrypt the cipher-
text anymore, thus marking the minimum or max-
imum value of the respective coordinate.
6. The distance in meters between the minimum and
maximum coordinates of the latitude and longi-
tude represent the tolerance and can be deter-
mined by utilizing the following formula (Shep-
pard and Soule, 1922):
∆Lat = Lat
y
− Lat
x
∆Long = L ong
y
− Long
x
tmp
lat
=
(Lat
x
+ Lat
y
)
2
∗
π
180
dx = 111.3 ∗ cos(tmp
lat
) ∗ (∆Long)
dy = 111.3 ∗ (∆Lat)
distance =
p
dx
2
+ dy
2
∗ 1000[m]
(1)
This testing algorithm yields a definitive metric
for the tolerance within a given square in meters.
Thus, this algorithm assigns any given random point
a tolerance value which can be evaluated afterwards.
The value itself represents the mean tolerance within
the square surrounding the given point. Given the pre-
vious hypothesis, the expected value is approximately
three meters.
For this particular evaluation, a dataset of 2000
sample points was generated with lat
x
∈] − 90, 90]
and long
x
∈]−180, 180] using a uniform distribution.
Thus, a large scale of the earth surface is evaluated.
The resulting latitude and longitude tolerances are
shown in Figure 4.
4.2 Results
The study yields results which exceed the previously
hypothesized tolerance of three meters by about a me-
ter difference. The resulting mean tolerance of the
study is 3.9302m. To further investigate the results of
the study, the relation between the change in latitude
and longitude of the examined point is of particular
interest. The first diagram of Figure 4 assumes a fixed
latitude and a changing longitude value. A change in
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
450

longitude will, apart from error noise, tend to a mean
longitude difference value of 3∗10
−4
. No regular pat-
tern can be extracted from the the first Diagram of 4.
Though, the difference in latitude remains steadily at
2.6 ∗ 10
−4
.
Regarding the second diagram of Figure 4, a sig-
nificant parabola shaped pattern results. When alter-
ing the latitude of the random points and fixing the
longitude, the resulting longitude difference describes
a parabola pattern, while the latitude difference stays
at 2.6 ∗ 10
−4
. This relation can be shown in a three-
dimensional plot to further interpret the results. By
utilizing formula 1, which gives a distance between
two points, the effective tolerance in meters can be
visualized.
Figure 5: A 3D plot of the tolerance.
The trapezoid shaped figure in Figure 5 shows the
relation between the change in the point’s coordinates
and the resulting tolerance in meters. A significant
decrease in tolerance for latitude values with an in-
creasing absolute value exists within the data. For
longitude values ∈ [−71, 71] degrees, the tolerance is
tending towards the previously mentioned mean value
of 3.9302m and even exceeding it. This behavior is
contradictory to the statement of the What3Words ser-
vice, which ensures a tolerance of theoretically three
meters. As for latitude values 6∈ [−71, 71], the tol-
erance falls below three meters, thus contradicting
the statement. The expected behavior for the out-
come in regards to the hypothesis would have been a
steady plane in the 3D space on the three meter level.
Though the three-dimensional trapezoid hints towards
a different aspect, which has not been considered yet.
On the one hand, the upper and lower latitudes
of the earth are significantly smaller concentric cir-
cles than the latitudes further towards the equator,
thus resulting in different circumferences. On the
other hand, the longitudes all possess the same length,
reaching from the north to the south pole of the earth.
In order to fill the surface of the globe with
squares, like the What3Words service does, a uniform
distribution of the squares is required. The claims
of the service, in regards to the three-by-three meter
squares are thereby not feasible. A grid of equally
sized squares cannot be fitted onto a spherical surface
like the earth. So, in order to keep the organized grid
form, the shape of the squares needs to be morphed.
Thus, the upper and lower lengths or the square get
shrunk down to adapt to the shrinking circumference
of the latitudes. Therefore, the ”squares” should not
be considered as squares at that point but rather as
trapezoids. Therefore, the results of Figure 5 are plau-
sible. With rising absolute value of the latitudes to-
wards the poles, the side lengths of the trapezoid con-
sequently shrink. The tolerances behave accordingly,
as there are lower tolerance bounds for the trapezoid
itself. When lowering the absolute value of the lati-
tude, thereby moving towards the equator, the toler-
ances get bigger as the trapezoid’s side lengths and
consequently its area increase.
Within the interval of [-71,71] degrees of latitude,
no significant increase in circumference is appearing
as the curvature of the sphere within this range is not
as steep in comparison to the outer range of the in-
terval. Thus, the tolerance almost stagnates within
this interval, as can be seen in Figure 4. Never-
theless, the average value amongst all the measured
tolerances is well above the hypothesized three me-
ters, thereby contradicting the previously mentioned
hypothesis. The LDEA* algorithm therefore allows
a larger tolerance of 3.9302m. With more samples
at hand, the mean value may tend towards four me-
ters, as the interval of ∈ [−71, 71] degrees includes
more values above four meters than the outer inter-
vals which mainly consist of tolerance values in the
interval ]2.7, 3.5] m.
4.3 Security Considerations
Regarding the security of the LDEA* algorithm, a
potential attacker only needs to gather information
about the location of the receiver with a tolerance of
1.9651m. Due to the XOR operation of the symmetric
access key and the What3Words hash (s. Figure 2), an
attacker might be able to get hold of the secret access
key. When conducting a ciphertext only attack on the
algorithm, the computational effort would be analo-
gous to the effort of breaking the AES-256 algorithm,
thus making it infeasible.
If an attacker would get hold of the randomly gen-
erated key, either by intercepting the key exchange
or rather by extracting the key from a legitimate sen-
sor node within the network, he would only need to
break the What3Words hash. Theoretically, the at-
tacker needs to hash all 57 ∗ 10
12
possible addresses
What3Words Geo Encryption: An Alternative Approach to Location based Encryption
451

and XOR them with the symmetric key. Though, the
search space can be reduced by a large factor with ad-
ditional knowledge about the location of the receiver,
e.g. the country or state. Also, an attacker might
know even more about the node, e.g. if it is located
within a building thereby excluding rural areas. So,
by educated guessing, a large scale of irrelevant ad-
dresses can be extracted from the set of potential ad-
dresses. This is all assuming that the attacker already
knows the randomly generated key. To hinder an at-
tacker from getting the symmetric key for all the par-
ticipants in the network, it is recommended that every
partner in the network exchanges a unique key with
the sender. This leads to a more complex communi-
cation scheme but benefits the overall security of the
algorithm.
5 CONCLUSION
The experiments conducted in this paper showed, that
the overall mean tolerance of the LDEA* algorithm
lies well above the hypothesized three meters of tol-
erance. This is due to the underlying grid structure of
the What3Words world map. The varying sizes of the
”squares” lead to a divergence of tolerance within the
most northern or southern regions of the earth.
With regards to the LDEA* algorithm, the toler-
ance leads to a larger area of decryption. A poten-
tial sender may very well assume, that a receiver will
be able to decrypt the ciphertext, if encrypted with
the LDEA* algorithm. This assumption only holds,
when the GPS measurement equipment on the re-
ceiver side is accurate enough to fall within the region
of
3.9302m
2
= 1.9651m, as the tolerance applies to the
whole ”square”. Modern GPS receivers are well capa-
ble of achieving this level of accuracy by utilizing the
differential GPS technology, described in (Van Sickle,
2015). This allows a GPS receiver to calculate its po-
sition in difference to another fixed point, thus elim-
inating some of the artificial inaccuracies of the re-
ceivers.
With the LDEA* algorithm at hand, e.g. an IoT
sensor network is able to efficiently encrypt the data
shared between the communication partners, who op-
erate in a publish-subscribe scheme. Future work may
focus on the concrete implementation of a tamper-
proof GPS receiver, since this aspect is assumed as
given in this paper. Existing proposals by Pozzobon
et al.(Pozzobon et al., 2011) already give a theoretical
approach but lack an implementation of the system
itself.
REFERENCES
Biham, E. and Shamir, A. (1991). Differential cryptanalysis
of DES-like cryptosystems. Journal of Cryptology,
4(1):3–72.
Day, C. (2019). What about swear words? Avail-
able: https://intercom.help/what3words/en/articles/
2212867-what-about-swear-words.
Farooq, U. and Aslam, M. F. (2017). Comparative anal-
ysis of different AES implementation techniques for
efficient resource usage and better performance of an
FPGA. Journal of King Saud University-Computer
and Information Sciences, 29(3):295–302.
Liao, H.-C. and Chao, Y.-H. (2008). A new data encryp-
tion algorithm based on the location of mobile users.
Information Technology Journal, 7(1):63–69.
Macgregor, M. (2019). How are the words as-
signed? Available: https://support.what3words.com/
en/articles/3577589-how-are-the-words-assigned.
Matsui, M. (1993). Linear cryptanalysis method for DES ci-
pher. In Workshop on the Theory and Application of of
Cryptographic Techniques, pages 386–397. Springer.
NIST (1999). Data encryption standard. Federal Informa-
tion Processing Standards Publication.
Pozzobon, O., Wullems, C., and Detratti, M.
(2011). Tamper resistance. GPS World.
Available: https://www.gpsworld.com/
transportationtamper-resistance-11403/.
Rountree, D. (2011). 2 - cryptography. In Rountree, D.,
editor, Security for Microsoft Windows System Admin-
istrators, pages 29 – 69. Syngress, Boston.
Scott, L. and Denning, D. E. (2003). Location based
encryption & its role in digital cinema distribu-
tion. Technical report, NAVAL POSTGRADUATE
SCHOOL MONTEREY CA.
Sheppard, W. W. and Soule, C. C. (1922). Practical navi-
gation. World Technical Institute.
Singh, M., Rajan, M., Shivraj, V., and Balamuralidhar, P.
(2015). Secure MQTT for Internet of Things (IoT). In
2015 Fifth International Conference on Communica-
tion Systems and Network Technologies., pages 746–
751. IEEE.
Van Sickle, J. (2015). GPS for land surveyors. CRC Press,
Boca Raton, FL, USA.
what3words, A. (2019). Available: https://what3words.
com/about-us/.
what3words Ltd. (2019a). What3Words Enterprise
Suite. Available: https://what3words.com/products/
enterprise-suite/.
what3words Ltd. (2019b). What3Words Homepage. Avail-
able: https://what3words.com.
Wing, M. G., Eklund, A., and Kellogg, L. D. (2005).
Consumer-grade global positioning system (GPS)
accuracy and reliability. Journal of forestry,
103(4):169–173.
Xie, T., Liu, F., and Feng, D. (2013). Fast Collision Attack
on MD5. IACR Cryptology ePrint Archive, 2013:170.
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
452
