Practical Depth Estimation with Image Segmentation and Serial U-Nets
Kyle J. Cantrell
a
, Craig D. Miller
b
and Carlos W. Morato
Department of Robotics Engineering, Worcester Polytechnic Institute, 100 Institute Road, Worcester, MA, U.S.A.
Keywords:
Autonomous Vehicles, Depth Estimation, Ensemble Neural Networks, Intelligent Transport Systems,
Semantic Segmentation, U-Net, Vehicle Perception, VSLAM.
Abstract:
Knowledge of environmental depth is required for successful autonomous vehicle navigation and VSLAM.
Current autonomous vehicles utilize range-finding solutions such as LIDAR, RADAR, and SONAR that suffer
drawbacks in both cost and accuracy. Vision-based systems offer the promise of cost-effective, accurate, and
passive depth estimation to compete with existing sensor technologies. Existing research has shown that it is
possible to estimate depth from 2D monocular vision cameras using convolutional neural networks. Recent
advances suggest that depth estimate accuracy can be improved when networks used for supplementary tasks
such as semantic segmentation are incorporated into the network architecture. A novel Serial U-Net (NU-
Net) architecture is introduced as a modular, ensembling technique for combining the learned features from
N-many U-Nets into a single pixel-by-pixel output. Serial U-Nets are proposed to combine the benefits of
semantic segmentation and transfer learning for improved depth estimation accuracy. The performance of
Serial U-Net architectures are characterized by evaluation on the NYU Depth V2 benchmark dataset and by
measuring depth inference times. Autonomous vehicle navigation can substantially benefit by leveraging the
latest in depth estimation and deep learning.
1 INTRODUCTION
Typical color monovision cameras provide three data
points per pixel in a given image. The data points
correspond to the red, green, and blue (RGB) inten-
sity levels (from 0 to 255) present in the image at that
specific point. Stereo vision cameras are able to pro-
vide a fourth datapoint at each pixel, namely depth.
Since depth is required for vehicles to localize and
build maps of their environment, many autonomous
vehicles rely on stereo vision. Although stereo vision
cameras can provide the required depth data, they are
frequently orders of magnitude more expensive than
a single monovision camera. Achieving stereo vision
levels of performance from a monovision camera is
desirable as they are smaller, cheaper, and less sophis-
ticated. As the cost of computational power continues
to plummet, the additional processing power required
to use a neural network to extract the depth data from
a monovision camera feed does not present a large
burden. This paper explores the estimation of depth
data strictly from 2D RGB values from a monovision
camera.
a
https://orcid.org/0000-0002-2785-9881
b
https://orcid.org/0000-0003-2562-6088
Figure 1: Depth prediction results on KITTI 2015 (Godard
et al., 2017).
1.1 Problem Description
An important problem in intelligent transport sys-
tems is autonomous navigation, an inevitably com-
plex super-set of problems involving object detection,
trajectory generation, and the colloquially termed
ODOA (Obstacle Detection and Object Avoidance).
At the heart of this problem is the ability to accu-
rately estimate the depth of an object within a field
of view (FOV). This is achievable today with several
406
Cantrell, K., Miller, C. and Morato, C.
Practical Depth Estimation with Image Segmentation and Serial U-Nets.
DOI: 10.5220/0009781804060414
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 406-414
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

techniques such as stereo-vision (using the overlap of
two cameras in a computation to triangulate the po-
sition of an object in a frame relative to the camera
resolutions and position). Another method is pairing
a camera with a range finding solution like LIDAR,
RADAR or ultrasonic sensors. Both of these methods
have drawbacks in hardware cost and computational
cost.
In addition to producing reliable depth data is the
need to produce fast, actionable depth data as well.
Without sufficiently fast depth data processing, the
decision systems in place will be unable to safely nav-
igate without the aid of an online, collaborative envi-
ronment which is unrealistic for practical autonomous
vehicles. The true nature of autonomy in regards to
navigation is the independent decision making that
can take place and in order for that to happen in a
safe, robust way, timely and accurate data is needed
in a continuous stream format.
The purpose of this paper is to present a solution
to the problem of ODOA via depth estimation with
monocular devices, thereby reducing the amount of
hardware and computational cost necessary for an au-
tonomously navigated robot.
1.2 Literature Review
Many researchers have attempted to solve this prob-
lem with various levels of success. Early naive ap-
proaches involved hand-crafted features and resulted
in only modest accuracy. More recent approaches
have trained convolutional neural networks (CNNs)
to simultaneously predict depth and offer semantic
segmentation of an image. A few datasets exist for
benchmarking depth estimation. The two most pop-
ular sets are KITTI (Geiger et al., 2013) and NYU
Depth Dataset V2 (NYUD v2) (Silberman et al.,
2012). Both of these references have been cited thou-
sands of times and are the de facto standards for
validating new depth estimation frameworks. State-
of-the-art performance on the KITTI dataset is cur-
rently a relative square error of 2.00. This result
was achieved by Manuel L
´
opez Antequera (Mapil-
lary, September 2019) and is not yet published. Cur-
rent state-of-the-art performance on the NYUD v2
dataset is a root-mean-square error of 0.356 (Lee,
2019). Performance on both datasets has rapidly im-
proved over the past several years due to the exper-
imentation and implementation of a variety of tech-
niques. Traditional depth estimation networks take
RGB values from stereo images as input and the depth
values as the ground truth for backpropagation. Once
the network is trained, the network can be presented
monocular images and it is able to estimate depth.
The networks typically utilize an end-to-end, pixel-
to-pixel architecture. This means that the size of the
input and output vectors will be identical. In (Jiao
et al., 2018) and (Wang et al., 2015), semantic seg-
mentation was shown to improve depth estimation ac-
curacy. (Jiao et al., 2018) uses a hybrid network ar-
chitecture and defines an attention-driven loss to im-
prove efficacy. Semantic segmentation is a rich field
of study on its own and can be approached in many
ways. Even though it is a field in its own right, seman-
tic segmentation is an integral part to our objective
as the semantic scene labeling is important to our vi-
sion of contributing to solving the obstacle detection
and avoidance problem. Using methods presented in
(Farabet et al., 2012), we hope to utilize semantic seg-
mentation to inform our convolutional network on the
correct depth estimation predictions.
Figure 2: Original RGB Image and Corresponding Segmen-
tation.
Figure 3: Network Architecture Combining Depth Estima-
tion and Semantic Segmentation (Jiao et al., 2018).
Given the basis of existing research, we hypothesize
that by combining many of the latest techniques, we
will be able to achieve near state-of-the-art depth esti-
mation accuracy performance on NYUD v2. Specifi-
cally, this model will:
• Leverage the existing U-Net architecture
• Pre-train encoder layers on the ImageNet dataset
• Incorporate state-of-the-art semantic segmenta-
tion
• Allow for the integration of networks trained on
supplementary tasks
The network will be benchmarked on the NYUD v2
dataset. If the network produces accurate output, it
could serve as a basis for ODOA and 3D mapping al-
gorithms simply using a monocular camera, the impli-
Practical Depth Estimation with Image Segmentation and Serial U-Nets
407

cations of which are current technologies that enable
ODOA, such as LIDAR, RADAR and Sonar, could
be enhanced or replaced. LIDAR, in particular, has
many drawbacks but finds itself as one of the more
prevalent technologies of choice for this application
because of its price point. Some of the drawbacks to
this can be seen in (Farabet et al., 2012).
Current systematic solutions to depth estimation
tend to fall short in several areas including accu-
racy, scalability and Size, Weight, Power and Cost
(SWaPC). For instance, the current state-of-the-art
performance holder on KITTI (Lee, 2019), has a rel-
ative squared error of 2.00, inferring a 98 % effi-
cacy rate. At short distances and low velocities this
isn’t a problem in autonomous robotic applications
but at high velocities in sensory heavy environments,
2% can be the difference of collision or mission suc-
cess when factored in with inference time, process-
ing time for other tasks, and state machine updates.
Further, considering again the state-of-the-art holder,
the base models used in the paper are based heav-
ily on exceedingly deep architectures (ResNet50/100,
DenseNet121, etc). The relationship between accu-
racy and inference times are proportional in that the
higher the accuracy (and thus deeper the network)
the higher the inference time. In the case of a base
ResNet50, the shallowest architecture, takes 103ms
for an error rate of 7 as shown in (He et al., 2016).
The proposed solution seeks to bridge the accuracy,
SWaPC, and speed divide by leveraging state-of-the-
art deep learning to extend the ability of standard
cameras into scene-understanding sensors with intel-
ligent comprehension suitable for autonomous driv-
ing decision making. Based on the current research
referenced in this section, it is evident that perform-
ing depth estimation through the use of artificial neu-
ral networks to decompose an image into its essential
depth features can provide a depth output mapping
suitable for near-real-time inferences without the cost
associated with expensive LIDAR, RADAR, or Stere-
ovision systems, with the added benefit of integrating
with these systems in the future for combinatorial im-
provement.
2 EXISTING DEPTH
ARCHITECTURES
Several existing neural network architectures are
trained to predict depth from RGB images.
2.1 Standard CNN
Standard CNN architectures are a default choice for
many computer vision tasks such as image classifi-
cation, digit recognition, and facial recognition. For
this application, a sequential CNN with two convo-
lutional layers followed by alternating densely con-
nected and dropout layers was evaluated. Nearly all
convolutional and densely connected layers were ac-
tivated by the ReLU nonlinearity. The output layer
was linearly activated.
2.2 RCNN
Recurrent Convolutional Neural Networks (RCNN)
represent a hybrid architecture that can leverage the
state-of-the-art in both sequence-based deep learning
(RNN) and image classification (CNN). Several com-
mercial and high performance RCNN models have
been successful in related fields such as the R-CNN-
192 developed by Ming Liang et al in Recurrent Con-
volutional Neural Network for Object Recognition
(Liang and Hu, 2015). The idea to combine the
proven standard Convolutional Neural Network clas-
sifier and segmentation ability with a proven sequen-
tial predicting Recurrent network was born of the idea
that the depth data being trained can inform the LSTM
layer(s) that a desired feature to be learned beyond the
object segmentation is the relation between the front
and the back of the image. An example architecture
can be seen in Figure 4.
Figure 4: CNN + LSTM Model.
For practical purposes, this is a standard Convolu-
tional Neural Network with a single LSTM layer of
512 Units. The input to the neural network is a single
RGB image with a resolution of 640x480 pixels. Af-
ter two convolutional layers with two pooling layers
interleaved in between, a 50 percent dropout layer is
inserted. The output of the dropout layer is connected
to the LSTM layer input with 1 sample, timestep of
1 and 512 features (the output of the CNN). An alter-
native RCNN was developed as well where a second
hidden LSTM layer was constructed.
2.3 U-Net
U-Net is an encoder-decoder neural network architec-
ture. The 2D size of U-Net’s input and output arrays
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
408

are equal. U-Net is frequently used for the segmenta-
tion of images. Since depth estimation requires a 2D
array output equal to the number of input pixels, U-
Net is an appropriate model candidate. For segmen-
tation, U-Net is typically appended with a final acti-
vation layer for assigning semantic classes. In depth
estimation, the output of the final decoding convolu-
tional layer can be taken as a 2D array of 8-bit depth
values with which a depth image can be constructed.
U-Net gets its name from the structure of the net
itself. The first half of the “U” represents the encoder
and the second half represents the decoder. Each step
on each side of the U represents a block of convolu-
tional and pooling layers. The output of each of the
encoding blocks feeds the next encoding block as well
as the analogous decoding block. Higher and lower
level image features are available at different blocks
of the network by connecting the weights across the
U.
Figure 5: U-Net Architecture with ResNet34 Backbone
(Ronneberger et al., 2015).
U-Net architectures can be built using a number of
different base models. ResNet, MobileNet, and VGG
are popular base model choices. In this experiment,
a U-Net architecture with a ResNet34 backbone was
loaded with encoder weights pre-trained on the Ima-
geNet dataset. The encoder weights were frozen dur-
ing the depth estimation training to preserve the fea-
ture extractors learned for image segmentation.
All existing architectures offer some benefit to the
depth estimation problem. Each of the models solve
part of the problem, but not the entirety of it. For in-
stance, Standard Convolutional Neural Networks per-
form admirably on object recognition and classifica-
tion, but lack an awareness of varying depths with
pixels. Recurrent Convolutional Neural Networks
should address the time varying output problem but
fall short in object detection. The best performing
object detection models usually involve an encoder-
decoder ”U-Net” style architecture and these models
too fail when trying to track the depth within images
because of an impulsive training regimen. A novel ap-
proach to solving these drawbacks is an ensemble ar-
chitecture combining the best parts of the existing ar-
chitectures mentioned in this section into an arrange-
ment termed ”NU-Net”, a portmanteau including the
number of N U-Nets connected serially. The develop-
ment of this architecture is detailed in Section 3.
3 SERIAL U-NETS
A Serial U-Net, or NU-Net, is an ensemble network
architecture for combining the learned features from
N-many U-Nets into a single pixel-by-pixel output.
The key benefit of this architecture is the ability to en-
hance the performance of an overall networks primary
task by integrating component U-Nets that were pre-
trained on supplementary tasks. For example, a sim-
ple serial U-net (2U-Net) may include a pre-trained
U-Net for semantic segmentation and a second U-
Net for depth estimation. The networks primary task
(depth estimation) is enhanced by the addition of the
pre-trained segmentation network. A more advanced
example may include three networks (3U-Net), two of
which were pre-trained - one for semantic segmenta-
tion and another for object detection. Again, in this
case the functionality of the pre-trained component
networks are used to improve performance of the en-
semble networks primary task of depth estimation. In
general, Serial U-Nets provide a modular architecture
for integrating supplementary learned features into a
new pixel-to-pixel ensemble network.
Two main variations of serial U-Nets are pre-
sented in this paper. The first variation, NU-Net, sim-
ply takes the output of the first component U-Net as
input to the following component U-Net. When in-
tegrating pre-trained networks, it may be necessary to
remove the final activation layer depending on the net-
works original task. In this way, the learned features
are extracted from the component network and can
be provided to the ensemble network in a meaningful
way. Therefore, the ”output” of a component U-Net
in a Serial U-Net is not always guaranteed to be the
exact output of its final layer as seen when operating
as a standalone network.
The second variation presented is NU-Net Con-
nected, which takes the output of the previous com-
ponent U-Net concatenated with the original input im-
age as input to the following component U-Net. NU-
Net Connected seeks to eliminate any residual infor-
mation loss from passing through the first component
network. This is a critically important difference from
the vanilla NU-Net. NU-Net can be viewed as a se-
ries of isolated functions that simply pipe outputs to
each other, whereas NU-Net Connected is able to use
Practical Depth Estimation with Image Segmentation and Serial U-Nets
409

output from pre-trained component networks in addi-
tion to the original input image to perform its task.
Reverting to the previous example, this implies that a
2U-Net Connected model could utilize the results of
a component semantic segmentation network in addi-
tion to an unmodified RGB image to produce a depth
estimate. This concept can be extended to include N-
many U-Nets in series for the integration of additional
learned features that can help produce more accurate
predictions. Network sequence must be considered
when designing both NU-Net and NU-Net Connected
models.
Each component U-Net is structured based on a
backbone architecture. The backbone architecture
dictates the layer structure in the encoder half of the
U-Net, which is then mirrored in the decoder half
as well. Clearly, selection of each backbone archi-
tecture largely influences performance results. Any
backbones can be used in the component U-Nets in a
Serial U-Net. It is not necessary to utilize the same
backbone for each component U-Net in a Serial U-
Net model. Since the number of parameters in higher
order Serial U-Nets can become large quickly, it is
preferable to use component U-Nets with the smallest
backbone that is able to achieve satisfactory results
for that component task (segmentation, object detec-
tion, etc.). Attention must still be paid to matching
the input and output layer sizes to ensure proper pip-
ing of each component result. Minimizing backbone
sizes saves the level of computation required for in-
ferencing. By using larger backbones, it is possible
to increase the accuracy of the serial U-net at the ex-
pense of training time and inference time. When us-
ing larger backbones such as DenseNet201, there are
many more parameters that must be calculated than
in smaller backbones such as VGG16. Updating the
additional parameters during training requires more
computational resources results in longer training ses-
sions.
In the Serial U-Net built for the task of depth esti-
mation, the weights of the layers from the pre-trained
component networks are frozen. The original func-
tionality of the network is thus preserved. Without
freezing the pre-trained weights, large gradients at
the first few epochs of the depth estimation training
process have the potential to dramatically change the
initial weight values and possibly destroy the learned
behavior. In this paper, weights in the final compo-
nent U-Net module of the Serial U-Nets were previ-
ously untrained and randomly initialized. Pre-training
and/or strategic weight initialization would likely re-
sult in improved performance.
To summarize, the Serial U-Net is a modular en-
semble architecture for combining the learned fea-
tures of N-many component U-Nets. By combin-
ing component U-Nets pre-trained on supplementary
tasks, performance on a primary task can be im-
proved. Different backbone architectures can be se-
lected for each component U-Net to attempt to op-
timize total computation time and ensemble perfor-
mance on the primary task.
3.1 2U-Net (W-Net)
2U-Net, or W-Net, is a proposed Serial U-Net archi-
tecture for leveraging semantic segmentation for im-
proved depth estimation. W-Net is shown in Figure 6.
W-Net is composed of two U-Nets in series. It is the
simplest possible implementation of a Serial U-Net.
The first U-Net is a pre-trained network to perform
segmentation. The output from the first U-Net is fed
into the beginning of a second untrained U-Net. Dur-
ing the depth estimation training phase, the weights
of all of the layers in the first U-Net are frozen.
3.2 2U-Net Connected (W-Net
Connected)
W-Net Connected is also a proposed Serial U-Net ar-
chitecture. W-Net Connected is shown in Figure 7.
It is very similar to W-Net with the exception of a
connection between the RGB input to the input of the
second U-Net. In this way, the second U-Net sees
the original image as well as the output from the first
U-Net. By connecting the second U-Net to both of
these layers, W-Net Connected is able to utilize a pre-
segmented image (from U-Net #1 output) to help in-
form the depth estimate without losing any informa-
tion from the directly connected original image.
After concatenating the RGB input with the first
U-Net output, it is reshaped to (480,640,4) and passed
to the second U-Net.
4 LOSS FUNCTIONS
During the research phase, it became apparent that ex-
perimenting with the Loss functions was necessary.
As noted in (Eigen et al., 2014) and (Lee and Kim,
2019), Scale Invariant Error is a log-based objective
function that works by penalizing in log steps the per-
cent error of the predicted output versus the ground
truth. In addition, it penalizes less when the direction
of the output is consistent with the direction of the
ground truth. The computation can be seen in (1).
L(y, y
∗
) =
1
n
n
∑
i
(d
i
)
2
−
λ
n
(
n
∑
i
(d
i
))
2
(1)
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
410
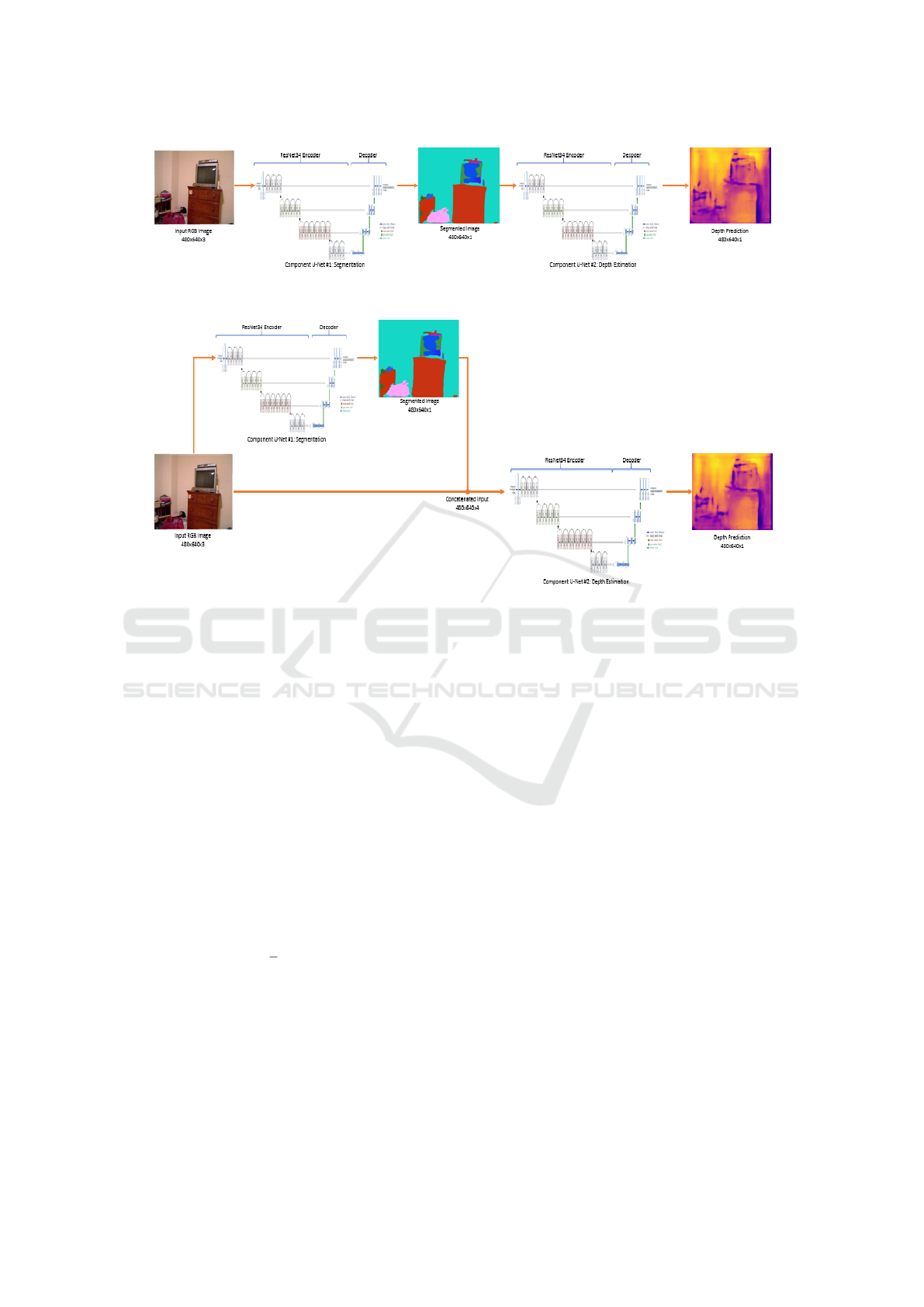
Figure 6: Serial U-Net Architecture: 2U-Net (W-Net) with ResNet34 Component Backbone.
Figure 7: Serial U-Net Architecture: 2U-Net Connected (W-Net Connected) with ResNet34 Component Backbone.
Where y is the predicted output, y
∗
is the ground truth,
d
i
= log(y
i
)−log(y
∗
), and λ is a real number between
[0,1). Noteworthy for this algorithm is that the raw
depth training data does not react well when trained
with this loss function because of the grayscale and
discrete nature of the image, even when normalized.
To deal with this, the log of the predicted and ground
truth pixels were “clipped”, or, limited to the value
of ε (1e-07). It was determined during research that
this loss function was not compatible with the training
data in an unprocessed, or raw format.
Mean Squared Error was eventually chosen as the
best performing Loss function and standard perfor-
mance metric to measure. The equation for Mean
Squared Error can be seen in (2).
L(y, y
∗
) =
1
n
n
∑
i
(y
i
− y
∗
i
)
2
(2)
This is a straightforward calculation measuring the er-
ror, per-pixel, between the ground truth and the pre-
dicted output image. It is worth noting that the state-
of-the-art in this problem space is generally measured
in Linear Root Mean Squared Error, Root-Mean-
Squared-Log-Error, and Absolute Relative Tolerance.
5 METHODOLOGY
The existing U-Net and Serial U-Net architectures
were benchmarked using the linear Mean Squared Er-
ror (MSE) loss function and the Adam Optimizer, an
adaptive optimization algorithm. This is an appro-
priate selection for a loss function given that depth
estimation is a regression task. Also evaluated was
Scale Invariant Loss, a popular log error calculation
that includes a “directional” term to correct the gra-
dients with a finer granularity than mean squared er-
ror alone. This can be seen in depth in (Eigen et al.,
2014). A learning rate of 0.0001 was used on all eval-
uations. All models were evaluated using a subset of
the NYUD v2 dataset.
5.1 Evaluation Setup
All models were trained on 1,088 image pairs and val-
idated on 360 image pairs from the NYUD v2 dataset.
All training and test data - both RGB and depth - were
normalized from a 0-255 to 0-1 scale. All models
were trained on a NVIDIA RTX 2060.
Practical Depth Estimation with Image Segmentation and Serial U-Nets
411

Table 1: Regression Results, NYUD v2: 20 Epochs.
Regression Performance
Architecture MSE RMSE
U-Net 0.0436 0.2087
W-Net 0.0421 0.2053
W-Net Connected 0.0412 0.2031
Table 2: Inference Benchmarks, NYUD v2: 2 Epochs.
Inference Benchmarks (ms)
Architecture Average Min. Max.
U-Net 100.64 80.16 458.64
W-Net 133.02 120.15 360.60
W-Net Connected 132.66 118.58 195.70
6 RESULTS AND DISCUSSION
6.1 Performance Benchmarks
All architectures were evaluated by training them for
20 epochs. All networks were trained with a batch
size of 2. A small batch size was used to prevent
memory errors during training. Minimum validation
MSEs are logged in the tables below from the 20
epoch training process.
After training, inference times for each model
were measured on a desktop with an i5-4460 proces-
sor, 16 GB of RAM, and a NVIDIA RTX 2060. Av-
erage, minimum, and maximum inference times were
logged after performing 100 model predictions. All
models used the same RGB input image for each iter-
ation.
Figure 8: Training and Validation Loss.
Figure 9: Input RGB Image for W-Net Connected Architec-
ture.
Figure 10: Evolution of Depth Predictions during training
of W-Net Connected Architecture.
6.2 Observations and Discussion
During the training process, several “phantom fea-
tures” were observed in the models predicted out-
put. For instance, the models were observed to pro-
duce silhouettes of chairs and tables in depth predic-
tions of RGB images that did not include these items.
This phenomenon exhibits learned features from pre-
vious training sessions indicating an underfitting ef-
fect which could be mitigated with proper data aug-
mentation techniques. The “ghost chairs problem”, as
it has become colloquially known, is addressed with
tenuous hyperparameter tuning, longer training ses-
sions, and more data.
Throughout the training process, depth prediction
images were logged after each training batch. As ex-
pected, the images gradually transitioned from being
generally amorphous to a well-defined image match-
ing the edges in the RGB input image. In intermediate
steps, irregular shapes can be seen forming over some
of the distinct features in the input image as shown in
Figures 9 and 10.
In some cases, the networks will produce outputs
which exhibit fairly accurate segmentation results, but
not entirely correct depth prediction. This can be ob-
served in Figure 14. The trees in the background of
the image below are mistakenly estimated to be closer
to the observer than the two individuals in the picture.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
412
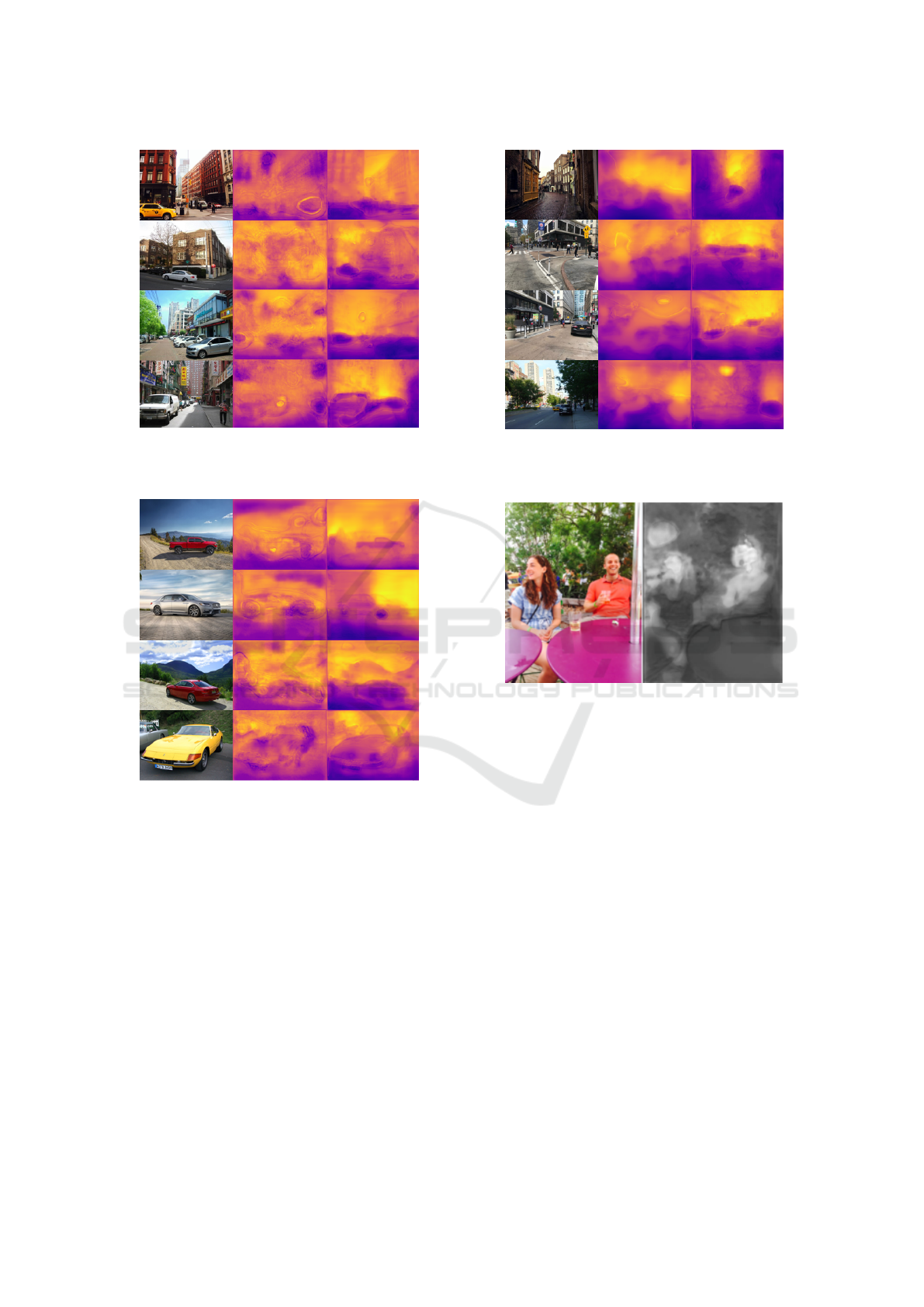
Figure 11: Left to Right: RGB Input Images (Newly Seen,
City), U-Net Depth Predictions (20 Epochs), W-Net Con-
nected Depth Predictions (20 Epochs).
Figure 12: Left to Right: RGB Input Images (Newly Seen,
Vehicles), U-Net Depth Predictions (20 Epochs), W-Net
Connected Depth Predictions (20 Epochs).
7 CONCLUSIONS
In conclusion, the best performing model in terms of
MSE is W-Net Connected. Despite the closely clus-
tered MSE values reported in Table 1, there is a stark
difference in the individual model prediction accuracy
when examined qualitatively. W-Net Connected ap-
peared to outperform W-Net due to its connection to
the original RGB input as expected from the literature
review discussion in section 1.2.
W-Net Connected also provided the best depth
predictions when given newly seen test images. U-
Net reached its lowest validation loss in epoch 4, W-
Net in epoch 16 and W-Net Connected in epoch 20.
Figure 13: Left to Right: RGB Input Images (Newly Seen,
City), W-Net Depth Predictions (20 Epochs), W-Net Con-
nected Depth Predictions (20 Epochs).
Figure 14: Correct Segmentation with Inaccurate Depth.
Within W-Net Connected, the segmentation capabili-
ties provided by a pre-trained component U-Net cer-
tainly appears to increase the degree of detail ob-
served in the final prediction image. However, it is
uncertain whether this is due to the improved segmen-
tation or by simply using a larger network. W-Net and
W-Net Connected logged the longest inference times
with an average runtime of roughly 133ms. U-Net in-
ference times were roughly 75% of that figure.
7.1 Future Work
To make pragmatic use of depth estimating neural net-
works, we intend to develop and maintain a Robot
Operating System (ROS) package that can utilize
state-of-the-art depth estimation networks to take in
a live video feed and publish point-cloud depth top-
ics for ODOA/3D mapping. This could simplify and
democratize the integration of depth estimation neu-
ral networks into robotic systems. Rigorous charac-
terization of the presented architectures will be com-
pleted with the full NYUD v2 datasets using losses as
Practical Depth Estimation with Image Segmentation and Serial U-Nets
413

defined in (Wang et al., 2015).
Features that can be added to the system that will
improve its efficacy include Data Augmentation, Cus-
tom Loss Function Design, and further hyperparame-
ter tuning. Quick improvements can be made by ex-
perimenting with more segmentation techniques and
even further improved by incorporating semantic seg-
mentation systems such as YOLOv3 or other FRCNN
based networks as proven in (Jiao et al., 2018) and
(Wang et al., 2015).
Further architectures to be tested and evaluated in-
clude the addition of further LSTM/GRU hidden units
such as W-Net Connected + LSTM. Preliminary re-
search in this paper and in accompanying references
suggest the time series nature of moving depth image
and the interpolated data points in the current datasets
can benefit from memory units when deducing depth
among sparsely populated depth maps. Another path
to take, illuminated by the work done in this paper, is
exploring the use of autoencoders for representation
learning of depth data to improve the inference time
of this system.
Finally, a review of appropriate loss functions will
be conducted. While MSE is a standard and staple of
measuring the success of depth-estimation, it is evi-
dent that the W-Net Connected model produces more
coherent results than U-Net, yet scored lower dur-
ing training and evaluation. From this result, we can
look on to utilizing scoring functions such as Scale In-
variant Loss, MSLE (Mean-Squared-Log-Error), and
possibly custom loss functions that take into account
more than relative or absolute difference between
ground truth and predicted images.
The end result of the improvements above will be
the practical real-time production of depth data fed
into a generic package for autonomous robotic sys-
tems equipped with obstacle detection and avoidance.
ACKNOWLEDGEMENTS
We thank Worcester Polytechnic Institute (WPI) for
providing computing resources and funding through-
out this project.
REFERENCES
Eigen, D., Puhrsch, C., and Fergus, R. (2014). Depth map
prediction from a single image using a multi-scale
deep network. In Advances in neural information pro-
cessing systems (NIPS).
Farabet, C., Couprie, C., Najman, L., and LeCun, Y.
(2012). Learning hierarchical features for scene label-
ing. IEEE transactions on pattern analysis and ma-
chine intelligence, 35(8):1915–1929.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013). Vi-
sion meets robotics: The kitti dataset. In The Interna-
tional Journal of Robotics Research, vol. 32, no. 11,
pp. 1231–1237.
Godard, C., Aodha, O. M., and Brostow, G. J. (2017). Un-
supervised monocular depth estimation with left-right
consistency. In 2017 IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Jiao, J., Cao, Y., Song, Y., and Lau, R. (2018). Look deeper
into depth: Monocular depth estimation with semantic
booster and attention-driven loss. In European Con-
ference on Computer Vision.
Lee, J. and Kim, C. (2019). Monocular depth estimation us-
ing relative depth maps. In Proceedings of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion.
Lee, J. e. a. (2019). From big to small: Multi-scale local
planar guidance for monocular depth estimation. In
arXiv preprint arXiv:1907.10326.
Liang, M. and Hu, X. (2015). Recurrent convolutional neu-
ral network for object recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 3367–3375.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention.
Springer.
Silberman, N., Hoiem, D., Kohli, P., and Fergus, R. (2012).
Indoor segmentation and support inference from rgbd
images. In Computer Vision – ECCV 2012 Lecture
Notes in Computer Science, pp. 746–760.
Wang, P., Shen, X., Lin, Z., Cohen, S., Price, B., and Yuille,
A. (2015). Towards unified depth and semantic predic-
tion from a single image. In 2015 IEEE Conference on
Computer Vision and Pattern Recognition (CVPR).
APPENDIX
All network models discussed and developed in
this research are available at: https://github.com/
mech0ctopus/depth-estimation.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
414
