
Vector based Control Routines for Swarms of Path Finding Robotic
Devices
Colin Chibaya
a
Sol Plaatje University, Chapel Road, Kimberley, South Africa
Keywords: XSet, Control Routines, Message Passing, Robotic Devices, Emergent Behaviour.
Abstract: Swarm intelligence systems where robotic devices encoded with primitive actions executed at individual
levels in order to cause swarm level emergent behaviour are appealing to the fields of nanotechnology and
bioinformatics. Interaction between robotic devices allow improved swarm level properties with features
more than the sum of the contributions of the individual robotic devices that form the swarm. However, it is
challenging to pinpoint particular primitive actions which drive robotic devices towards deliberately
engineered emergent behaviour. We propose an XSet model inspired by the behaviours of message passing
agents. The proposed XSet model supports direct device to device interactions in which implicit
communication spaces arise. In this context, an XSet puts together primitive actions, parameters, and meta
information which stipulates when primitive actions are useful to robotic devices. We assess path finding and
path following abilities of message passing robotic devices and compared the measures thereof to the relative
performances of the stigmergic counterparts. Better message passing performances are observed when time
in simulation is sufficiently long, when the population of robotic devices in the swarm is high. Besides giving
a new swarm control model, message passing XSets bring us closer to more generalized swarm control rules.
1 INTRODUCTION
The aptitude to form paths between selected search
points in simulated swarms of robotic devices
emanates from particular control routines that are
collectively designed to cause emergent behaviour
(Chibaya, 2014; Chibaya, 2015; Chibaya, 2019). In
this context, a robotic device is an autonomous
artificial agent designed with a nanite architecture in
mind (Chibaya, 2014). Nanites are tiny electronic
devices assembled at nanometre scale. Control
routines, on the other hand, are computational codes
implemented to characterize robotic devices’
individual-level actions (Negulescu and Barbat,
2004). Emergent behaviour is then non-reducible
phenomena observed in swarms of robotic devices
which cannot be traced back to the individual-level
actions of the robotic devices thereof (Chibaya,
2015).
The design of control routines is, dominantly,
inspired by some phenomena in nature, such as the
map-reading views known from geography (Werfel,
2002; Wehmer et al., 2006), biological metaphors
a
https://orcid.org/0000-0001-6995-605X
(Chibaya, 2014), geometric views (Ngo et al., 2005),
mathematical matrices (Harris, 2007), or physics
(Spears et al., 2004a; Spears et al., 2004b; Spears et
al., 2005). Successful control routines have been,
commonly, built on stigmergic ant-like colonies
(Chibaya, 2015), artificial bee colonies, or flocking
boids. However, although related emergent
behaviours are plausible, the individual-level actions
of swarm members are blurredly explained. Without
grasping the logic underpinining individual-level
actions of swarm members, simulated swarm
applications will remain naïve. In fact, chances are
high of evolving undesirably hazardous outcomes
from these swarms.
Although they are architecturally autonomous and
naïve, robotic devices’ interactions give rise to
emergent behaviour whose properties are more than
the sum of the contributions of the individual robotic
devices (Chibaya, 2015). Collections of control
routines, together with related parameter values, and
meta information, forms the verbs robotic devices
depend on in order to complete individual-level tasks.
However, what are the white-box design features of
272
Chibaya, C.
Vector based Control Routines for Swarms of Path Finding Robotic Devices.
DOI: 10.5220/0009780802720283
In Proceedings of the 17th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2020), pages 272-283
ISBN: 978-989-758-442-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

those control routines included in path finding and
path following robotic devices’ dictionary?
Formalizing the component units of appropriate
sets of control routines with which robotic devices
yield emergent behaviour is an ambitious task
(Chibaya, 2015). The work presented in Chibaya
(2015) proposed the use of an XSet model built on the
characteristics of stigmergic ant-like robotic devices.
In this context, an XSet is an eXtended Set
comprising control routines, parameter values, and
meta information stipulating how and when control
routines are useful to robotic devices (Chibaya, 2014;
Chibaya, 2015). Stigmergic robotic devices interact
indirectly via the environment using virtual
pheromone cues (Chibaya, 2014; Chibaya 2015). The
environment is the shared memory of the swarm.
However, stigmergic XSets do not provide details
regarding how to arrive at generalizable quantities of
pheromone level required by individual robotic
devices at a time. Also, they ignore the effects of
pheromone dissipation to swarm convergence speed
and quality. In fact, the quantities of pheromone
levels used are hard-coded (Chibaya, 2014).
Alternative non-stigmergic XSet models can be
tried for the same task domain. This paper
investigates the design of an XSet model built on the
behaviours of message passing robotic devices
(Chibaya, 2019). The proposed XSet supports
swarms of robotic devices that can directly interact
with one another one-on-one (Chibaya, 2014).
Message passing robotic devices can explicitly share
direction vectors and confidence measures in the
vectors they follow, and use this information to
determine resultant vectors that determine the next
path to follow. Shared vectors, together with related
confidence measures, are used to modify robotic
devices’ perceptions of the direction to the target at
the time. Precisely, robotic devices upgrade or
downgrade their confidence measures depending on
the quality of the information shared amongst
neighbours. With time, the swarms thereof converge
on deterministic paths towards desired targets.
1.1 Statement of the Problem
The particular problem addressed in this paper can be
re-phrased into two questions as follows:
Which control routines form valid message
passing XSets? In responding to this question,
we investigate the individual actions, the
parameter values, and meta information which
guide message passing robotic devices towards
predictable emergent behaviour. As a case
study and proof of concept, we investigate
those control routines useful for the path
finding and following behaviour in swarms of
robotic devices.
How do message passing swarms perform
relative to the stigmergic counterpart? In
responding to this question, we administer an
experiment in which we measure speed and
quality of emergence that arise from using the
message passing XSet versus the speed and
quality of emergence yield when a stigmergic
XSet model is used for the same path finding
and path following task. Speed of emergence
evaluates the time it takes a swarm to converge
on a trodden path (Chibaya, 2014). On the other
hand, quality of emergence establishes the
tendencies of robotic devices to
deterministically follow the established paths
(Chibaya, 2014).
While answers to these two questions may not
respond to the very general robotic device control
problem, the message passing XSet model is hoped to
provide features of an alternative approach to the
stigmergic model, which brings us closer to
generalized rules for addressing the broader swarm
control problem.
1.2 Assumptions
We assume message passing robotic devices designed
with abilities to use control routines listed in a
message passing XSet model. The task at hand is to
find and follow paths between selected points situated
in a simulated environment. At any time in
simulation, each robotic device is either searching for
a food-like target or it will be travelling to a nest-like
starting point. Perpetual knowledge of the task at
hand defines a robotic device’s internal state. Internal
state information is kept in robotic devices’ basic
memories, together with the information regarding
the direction vectors being followed, as well as the
robotic device’s confidence measures in those
vectors. Robotic devices are able to interpret the
vectors and confidence measures held in neighbours’
memories by computing their own resultant vectors
which fairly represents the directional views of all the
neighbour robotic devices around. A searching
robotic device uses direction vectors pointing to the
food-like target, while a returning counterpart uses
direction vectors pointing to the starting point.
Robotic devices can relocate towards the direction of
the found resultant vector, detecting targets in each
step, and checking if they should flip between
different internal states when it becomes necessary.
Vector based Control Routines for Swarms of Path Finding Robotic Devices
273

These assumptions connote a message passing XSet
model with a finite cardinality, which supports
robotic devices with a finite number of internal states.
1.3 Overview
Section 2 reviews related works, emphasizing on the
design of robotic device control views in which
formalization of the rules followed is the key problem
addressed. The method we follow in coming up with
the message passing XSet model is presented in
section 3, focusing on the identification and
interpretation of the key control routines required by
message passing robotic devices in computational
terms. The setup of the message passing XSet model
is described in this section. Thereafter, section 4
describes the design of an experiment with which we
evaluate and validate the message passing XSet
model against the stigmergic counterpart. Speeds and
qualities of emergence are measured and reported in
section 5. Section 6 concludes the paper, highlighting
our key observations and the contributions arising.
2 RELATED WORK
Use of XSets to control swarms of robotic devices
towards desired emergent behaviour was first
reported in Chibaya (2014). Subsequent papers then
followed (Chibaya, 2015). However, emphasis has
been on the use of stigmergic XSets which lack
details regarding identification of generalizable views
on the quantities of pheromone levels used by
individual robotic devices in each step. More so, they
ignore the effects of pheromone dissipation to swarm
convergence (Chibaya, 2015). A mathematical model
which captures the quantities of pheromone levels
used by robotic devices, the size of the scene in which
the swarm is deployed, the population of robotic
devices required, the amount of time the swarm
requires in simulation, and pheromone dissipation
factors may, hopefully, lead to more generalizable
views. However, such a mathematical model has not
been found as yet.
Compelling alternatives to the XSet model exist.
Most alternatives, like the stigmergic model, rely on
indirect robotic device interactions coordinated via
the environment (Di Caro et al., 2004; Negulescu and
Barbat, 2004; Bonaneau et al., 1999; Chibaya and
Bangay, 2007; Dorigo, 1992; Dorigo et al., 1999).
Other alternatives are built on cell propagation
theories (Nagpal, 2006), cellular automata (Geer et
al., 2003; Green, 1994; Sanders and Smith, 2009), cell
growth and morphogenesis theories (Nagpal and
Kondacs, 2002), or origami theories (Rothemund,
2006). However, related robotic devices must possess
substantial memory and extra elitist abilities to be
able to handle the computations thereto (Chibaya,
2014). Robotic device orientation is usually based on
hard-marked beacons in the scene (Werfel, 2002),
landmarks (Wehmer et al., 2006), mathematical
models (Ngo et al., 2005), physicomimetic forces
(Spears et al., 2004a; Spears et al., 2004b; Spears et
al., 2005), or some Jacobian matrices (Harris, 2007).
In these cases, robotic devices are able to solve and
convert mathematical equations into directional cues.
In some cases, robotic devices have physically
mounted sensors with which to orientate (Spears et
al., 2004b). However, these elitist features are not
characteristics of the naïve robotic devices we
assume.
A few control strategies embrace message passing
views (Trianni and Dorigo, 2005; Raijbhupinder et
al., 2010; Rodriguiz et al., 2007). In these, robotic
devices may hold blocks of textual messages
(Raijbhupinder et al., 2010) to share with other agents
of the swarm. However, processing of textual data is
equally complex. Useful data values are often lost
during text conversion and interpretation. The
message passing model we propose assumes robotic
devices that can share geometric vectors and the
confidence measures associated with using the shared
vectors. These are much easier to interpret. Although
vector arithmetics are popular in machine learning,
network analyses, and spatial data representation,
they are a fairly new angle in resolving the robotic
device control problem. The emphasis we put on
simplicity and specificity in the design of the message
passing XSet gives this strategy a computational
edge. In our view, a message passing XSet will,
potentially, augment the stigmergic counterpart
towards notable developments in swarm intelligence
systems, particularly agent control issues.
3 METHODS
An XSet driven swarm simulator of message passing
robotic devices was developed to solve the path
finding and path following problem on a simulated
environment comprising a food-like target and a nest-
like starting point. The default task of the swarm is to
locate the food-like target, and upon finding it, travel
back to the nest-like starting point. Trips between the
food-like target and the nest-like starting point are
repeated over and over until a set simulation period
lapses.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
274
3.1 Configuration of the XSet
Control routines included in the message passing
XSet are sequentially listed in the order in which they
are used by robotic devices. Meta information include
(a) the alias name of the XSet. Stigmergic XSets were
referred to as stigXSet (Chibaya, 2014). Message
passing XSets are aliased as msgXSet. This alias tells
us the inspiring metaphor on which included control
routines are built. Another meta data is the cardinality
of the XSet. Cardinality tells us how many control
routines are required in each robotic device’s internal
state. Stigmergic robotic devices needed, at most,
four control routines in each internal state (Chibaya,
2014; Chibaya, 2015). From repeated tests, message
passing robotic devices require one extra control
routine in each internal state. The number of internal
states and the amount of memory robotic devices
need are also important meta data. In this case, four
internal states are supported by both stigmergic and
message passing robotic devices. A message passing
XSet can sufficiently drive robotic devices towards
emergent behaviour as long as memory is sufficient
to keep internal state information, direction vectors to
and from the target, and the confidence measures
thereof.
msgXSet (cardinality, states, mem)
{
switch (states)
{
case 0: {MsP, PtV, Nrm, MvP, StS}
case 1: {NOp, NOp, NOp, NOp, StS}
case 2: {MsP, PtV, Nrm, MvP, StS}
case 3: {NOp, NOp, NOp, NOp, StS}
}
}
Listing 1: Template of a message passing XSet.
We summarize the design of a message passing
XSet in listing 1, where msgXSet is the alias name.
The model accepts three parameters, cardinality,
number of internal states supported, and amount of
memory allocated to each robotic device. In this case,
robotic devices can hold up to 8 memory blocks.
Control routines and related parameter values are
listed between the curly brackets. Each control
routine and its related parameter values are listed after
each switch-case entry. A control routine and its
parameter values are separated by a colon. Parameter
values to a control routine are separated by commas.
Different control routines are, also, separated by
commas. Control routines used in different internal
states are demarcated by curly brackets. A code such
as: (MsP: V
1
, V
2
, C) tells a robotic device to share
particular direction vectors and confidence measures.
The vectors shared are used to determine the next
direction to follow. Robotic devices can detect their
proximity to targets using the control routine aliased
as (PtV: V, C). The resultant vectors yield from any
computation are normalized using the control routine
(Nrm: X, Y, Z). Once orientated, robotic devices can
relocate to desired destinations using the control
routine (MvP: X, Y, Z). Should it be necessary at the
time, robotic devices can flip between different
internal states using the control routine (StS: m, n, x).
However, there are moments when robotic devices
have to do nothing. An empty control routine aliased
as (NOp:) is used. The next section describes the
computational interpretation of each of these control
routines.
3.2 Computational Design of Routines
In XSets, control routine names have three letters, e.g.
MsP, PtV, Nrm. These control routines are primarily
used by robotic devices for sharing vectors, detecting
targets, normalizing vectors, making movements, or
flipping between different internal states. This section
discusses the computational interpretation of these
control routines.
We indicated earlier on that message passing
robotic devices require some memory in which to
store internal state information, vectors, and
confidence measures. Keeping internal state
information in memory spells out a robotic device’s
tasks at the time (Panait and Luke, 2004a, 2004b,
2004c). It influences the behaviour of nearby robotic
devices (Parunak, 2005). For example, a robotic
device may flip to another internal state triggered by
a nearby robotic device’s proximity to the target
(Parunak, 2005). In some cases, such flips occur as a
reward for an achievement (Panait and Luke, 2004a).
Robotic devices in the search internal state
communicate with counterparts in the returning
internal state because those robotic devices likely
know where the food-like target is. Robotic devices
in the returning internal state prefer interactions with
members in the searching internal state because those
robotic devices would likely know better about the
direction towards the nest-like starting point. Internal
state changes are repeated every time a target is hit.
Listing 2 interprets the process through which
robotic devices achieve the flipping between different
internal states in computational terms. The mnemonic
(StS: m, n, x) summarizes the control routine for
flipping between internal states. It tells a robotic
device to set its internal state to mode m on condition
Vector based Control Routines for Swarms of Path Finding Robotic Devices
275
bool StS (m , n , x)
{
for-each robotic-device R
t
if (n is true in domain x)
{
internal state = m
}
}
Listing 2: Flipping between internal states.
that requirements n are satisfied in domain x. In our
case, m ranges between 0 and 3, representing the four
possible internal states message passing robotic
devices support. Then, n is a set of conditions which
indicates aspects of the simulation to trigger a robotic
device’s interests in changing from one internal state
to another. Inclusion of x sets the domain in which n
is satisfied. For example, (StS:1,0,0) tells a robotic
device to change to internal state case 1, provided that
the target indicators marked as 0 are in quantities
above 0 at the robotic device’s current location.
Message passing robotic devices can share
message blocks (Trianni and Dorigo, 2005) of the
format: (x
i
;y
i
;𝑓
⃗
v
;𝑓
w
;𝑛
⃗
v
;𝑛
w
). In these message blocks,
(x
i
;y
i
) is the offset of a communicating i
th
robotic
device. Communication is allowed between a path
finding robotic device and those robotic devices
whose offsets are within the set communication
range. The path finding robotic device self-localizes
relative to nearby robotic devices, placing itself at the
origin of its local coordinate system. The choice of
which vectors are attractive at the time depends on the
path finding robotic device’s internal state. When
searching, robotic devices are attracted to 𝑓
⃗
v
(food
vectors), weighed by 𝑓
w
(confidence measures in 𝑓
⃗
v
).
The path finding robotic device accumulates the
vectors read from all robotic devices around, each
weighted by its related 𝑓
w
. A resultant vector is
calculated, which overwrites the path finding robotic
device’s current 𝑓
⃗
v
. Returning robotic devices are
attracted to 𝑛
⃗
v
, weighted by 𝑛
w
. They also find a
resultant vector which points in the likely direction of
the nest-like starting point. Every time a resultant
vector is calculated, either 𝑓
w
or 𝑛
w
of the path
finding robotic device is upgraded or downgraded
depending on the quality of the information received.
Below, we show how resultant vectors are calculated.
3.3 Calculation of Resultant Vectors
A similar approach where vectors are shared before
resultant vectors are calculated was used in Ngo et al.
(2005). Resultant vectors summarize nearby robotic
devices’ past experiences (Rodriguez et al., 2007).
These combined experiences upgrade or degrade a
path finding robotic devices’ knowledge and
confidence in the vector it is following.
Upon deployment, robotic devices randomly pick
𝑓
⃗
v
and initialize 𝑓
w
to a minimal value possible. The
hope is that 𝑓
w
would improve as robotic devices gain
more knowledge of the environment through
interactions with other robotic devices. The local
coordinate system created by robotic devices span
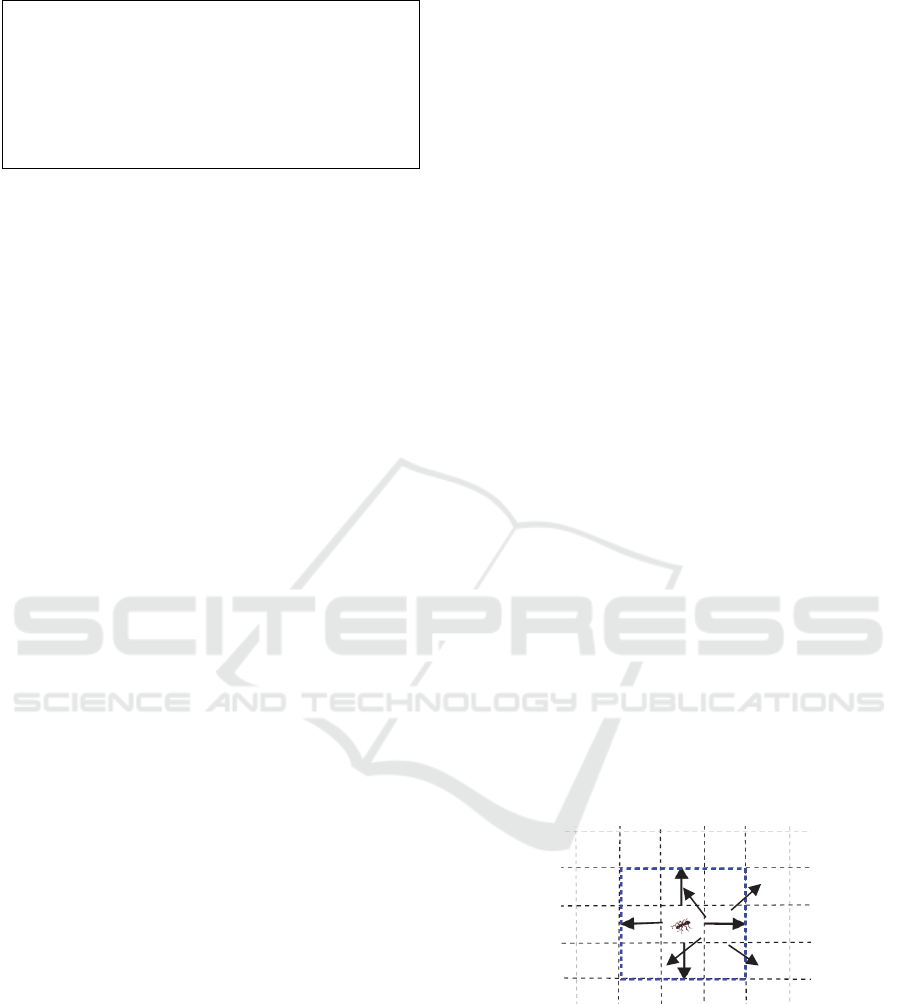
over three simulated grid cells in 2D spaces. Figure 1
shows a typical local coordinate system with eight
possible paths a robotic device can follow. The task
of the path finding robotic device is to decide on a
direction to take based on the information shared
from nearby robotic devices.
To find that resultant vector, a message passing
robotic device calculates intersection points and
points of closest approaches between all possible
pairs of vectors read from neighbours. The notion is
that, two vectors representing the knowledge of two
independent robotic devices would intersect at a point
close to the target. That vector which starts from the
origin of the local coordinate system to the
intersection point of the two vectors is a candidate
direction to follow next. In the event of a pair of
vectors not intersecting within the defined scene,
points of closest approach between the selected
direction vectors are determined. Once a set of all
intersection points and points of closest approach is
established, message passing robotic devices use least
squares point estimation to pick a fair direction vector
which represents the knowledge gathered, at the same
time updating or downgrading its own confidence
measure in the new selected direction.
Figure 1: coordinate system for path finding robotic
devices.
Figure 2 shows a set of intersection points and
points of closest approach for an arbitrary case.
However, how do we geometrically find those values
of x and y at which two vectors intersect or where
points closely approach each other? The problem of
determining these coordinates is geometric.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
276
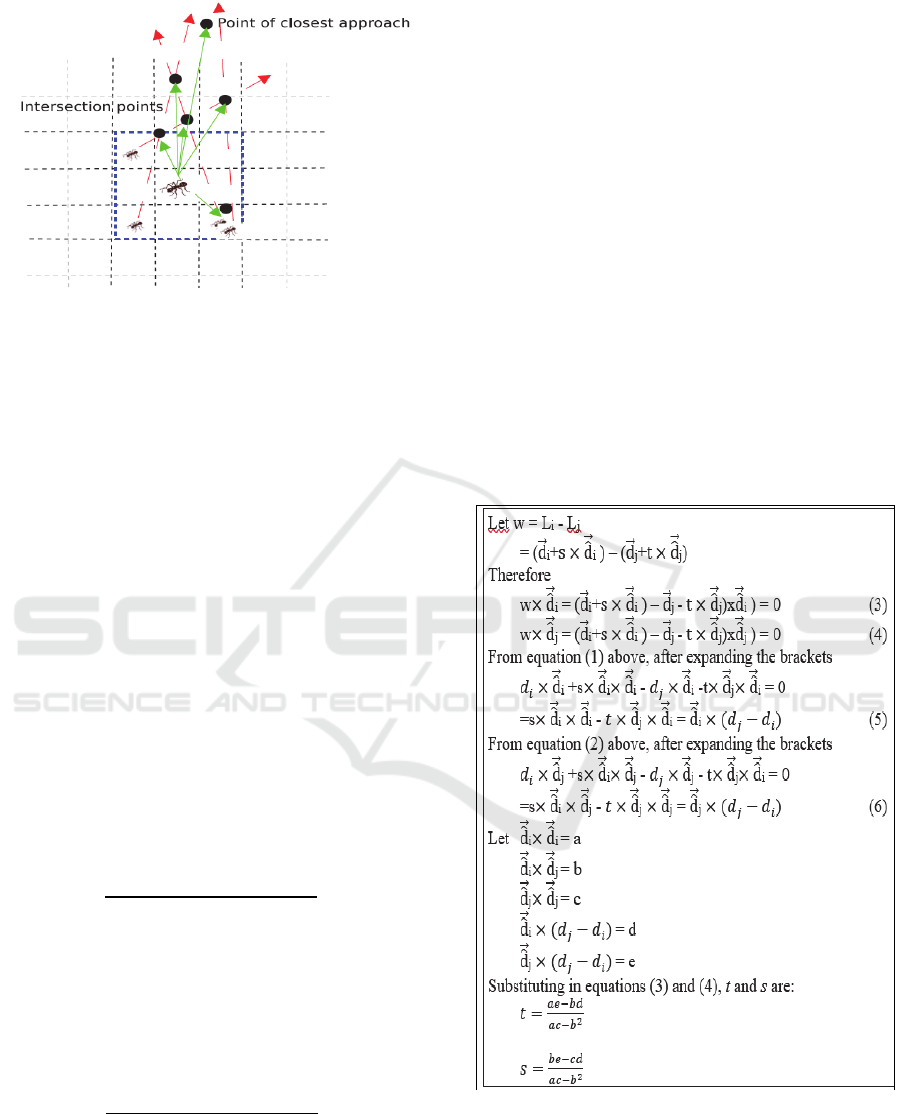
Figure 2: Intersection points and points of closest approach.
If we denote the vector followed by the i
th
robotic
device as 𝑑
⃗
i
, and that followed by the j
th
robotic
device as 𝑑
⃗
j
. Suppose the offsets of the i
th
and j
th
robotic devices relative to the path finding robotic
device are (x
i
; y
i
) and (x
j
; y
j
) respectively.
Then the points along each line segment
represented by vectors 𝑑
⃗
i
and 𝑑
⃗
j
are 𝑑
⃗
i
+𝑠𝑑
⃗
i
and
𝑑
⃗
j
+ 𝑡𝑑
⃗
j
respectively. Here, 𝑑
⃗
i
and 𝑑
⃗
j
are unit
vectors of 𝑑
⃗
i
and 𝑑
⃗
j
. Parameters s and t are
magnitudes. Let the points at 𝑑
⃗
i
+𝑠𝑑
⃗
i
and 𝑑
⃗
j
+𝑡𝑑
⃗
j
be (x
i+1
; y
i+1
) and (x
j+1
; y
j+1
) respectively. The
intersection point of 𝑑
⃗
i
and 𝑑
⃗
j is therefore (x ; y),
where x and y are computed as shown in equations (1)
and (2). With two points along each vector, we find
the point at which two vectors meet (Wikipedia,
2004) by finding the matrix determinants of the
coordinates of the points identified along each vector.
x
x
y
x
y
x
1
x
1
x
y
x
y
x
1
x
1
x
1
x
1
y
1
y
1
x
1
x
1
y
1
y
1
(1)
y
x
y
x
y
y
1
y
1
x
y
x
y
y
1
y
1
x
1
x
1
y
1
y
1
x
1
x
1
y
1
y
1
(2)
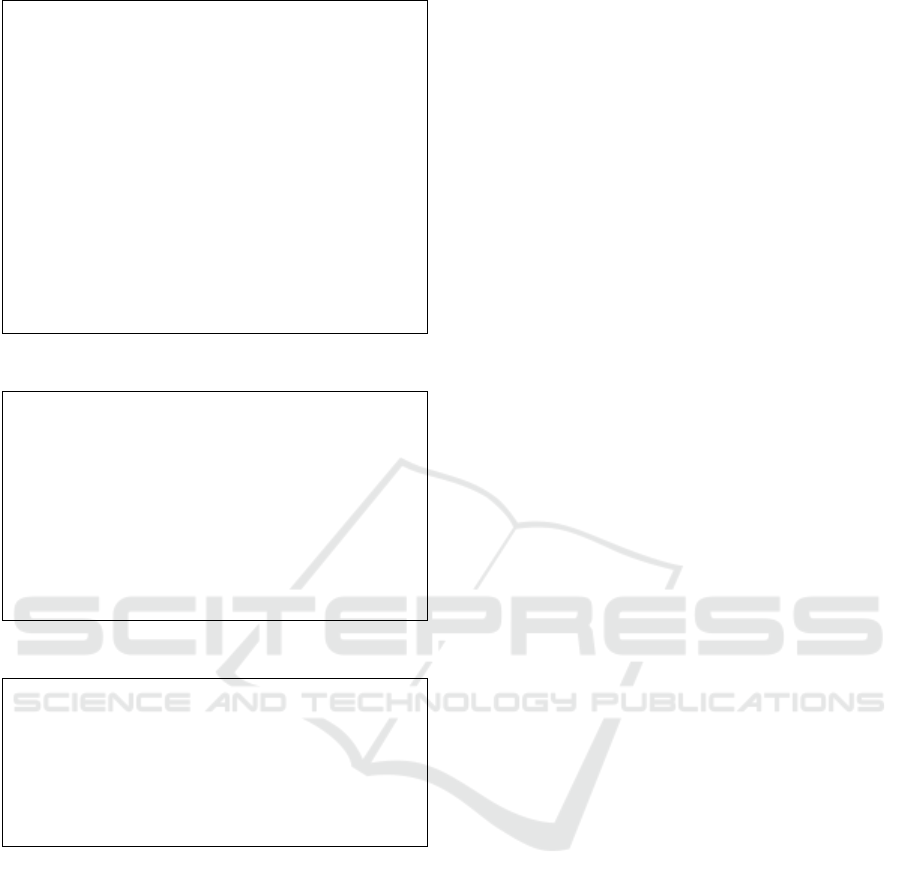
When vectors do not intersect, we get a point of
closest approach. If L
i
=𝑑
⃗
i
+𝑠𝑑
⃗
i
and L
j
= 𝑑
⃗
j
+𝑡𝑑
⃗
j
are equations of the line segments along vectors 𝑑
⃗
i
and 𝑑
⃗
j
, the point at which these two vectors have a
minimum offset, w=L
i
- L
j
, is the point of closest
approach. This point is when w is perpendicular to L
i
and L
j
. At this point, 𝑤𝑑
⃗
i
=0 and 𝑤𝑑
⃗
j
=0.
Algorithm 1 shows how 𝑤𝑑
⃗
i
=0 and 𝑤𝑑
⃗
j
=0 are
used to solve for s and t, and how we find the point
where w is smallest. Two vectors are parallel when
ac-b
2
=0. Robotic devices pick a midpoint along the
line segment w as the wanted point of closest
approach. The set of (x ; y) value of intersection points
and points of closest approach for all pairs of vectors
taken from nearby devices is the data from which a
robotic device finds its new path. Hopefully, the
vector found fairly represents the consensus of nearby
robotic devices.
Algorithm 1: Determining the values of s and t.
𝑦 𝑎
𝑥𝑚𝑏
(7)
𝑥𝑦𝑎
𝑥
𝑏
𝑥
(8)
𝑥 𝑎
𝑦𝑚𝑏
(9)
Vector based Control Routines for Swarms of Path Finding Robotic Devices
277

𝑥𝑦𝑎
𝑦
𝑏
𝑦
(10)
a
m
∑
x
y
∑
x
∑
y
m
∑
x
∑
x
(11)
b
m
∑
y
∑
𝑥
∑
x
∑
x
y
m
∑
x
∑
x
(12)
To pick a direction, least squares point estimation
(Chibaya, 2014) is used on that set of (x ; y)
coordinates. Two least squares regression lines arise,
one for y on x, and another for x on y. The regression
line for y on x is y = a
1
x + b
1
, and that for x on y is
x=a
2
y + b
2
(Chibaya, 2014). Equations (7) and (8)
determine a
1
and b
1
in y = a
1
x + b
1
, while equations
(9) and (10) find a
2
and b
2
in x = a
2
y + b
2
. In both
cases, m is the population of robotic devices around
the path finding robotic device. Equations (11) and
(12) show how we simplify equations (7) and (8) for
a
1
and b
1
. Flipping x and y in these equations gives the
formula for finding a
2
and b
2
in equations (9) and
(10). Least squares point estimator finds the point at
which the two regression lines intersect. That point
coincides with the centre of mass (𝑥̅; 𝑦). A vector
starting from the origin of the local coordinates
system to the centre of mass is the resultant vector we
want.
3.4 Updating Confidence Measures
We indicated that each vector has an associated
confidence measure which indicates how well a
robotic device has performed in previous orientation
choices. Confidence measures indicate the robotic
device’s trust in the path followed (Chibaya, 2014).
They reflect the quality of the vectors previously
followed. These are float values between 0 and 1,
where 1 indicates awareness of the direction to the
target and 0 indicates complete ignorance of the scene
features. A robotic device updates its confidence
measure by combining the confidence levels of
nearby robotic devices with its own using equation
(13).
𝑤
𝑡1
𝑤
𝑡
∑
∈
1𝑐𝜆 (13)
If there exist k nearby robotic devices to a path
finding robotic device, then let the vector held in each
of the k robotic devices be denoted as j. Therefore
∑
∈
is the average confidence measure of the k
robotic devices. To minimize the effects of outliers,
we find the spread of the views of the k robotic
devices and denote it as c, which is within the range
0 to 1. To penalize larger c, we use (1-c) as the desired
weight. An average of w
i
(t) of the path finding robotic
device and w
i
(t) of the k nearby robotic devices gives
the updated w
i
(t+1). Some randomness (λ) is added to
allow independence in robotic devices’ actions.
Randomness is especially useful when robotic
devices are isolated from the rest. That way, robotic
devices’ confidence levels would never deplete.
3.5 The Message Passing Routine
Listing 3 presents the message passing routine. The
routine has three parts, one where vectors are shared
in order to create a set of intersection points and
points of closest approach, another part where the
least squares point estimator is used to pick the
vector, and a part where confidence measures are
updated. In the mnemonic: (MsP:v
c
,v
j
,v
j
), v
c
are
blocks in robotic devices’ memories where
confidence measures are recorded. Then, v
j
are blocks
in robotic device memories where attractive vectors
are held. The third parameter indicates blocks in
memory in which the resultant vectors are recorded
after they are determined. Robotic devices overwrite
their old vectors in v
j
by the vectors yield. The routine
tells a robotic device to read vectors held in nearby
devices’ memories, read related confidence
measures, and find a vector to follow.
bool MsP (V
c
, V
j
, V
j
)
{
for-each robotic-device R
t
for-each robotic-device K
t
{
pos(K
t
)= (x
k
, y
k
, z
k
) - D
K
for-every-other K
v
{
pos(K
v
) = (x
v
, y
v
, z
v
)-D
v
if (D
k
Ո D
v
)
{
x = calculated from (1)
y = calculated from (2)
}
else
{
x=random x; y=random y
}
Add (x , y) to array []
}
c = avg (sdvev (x , y))
path-wght=avg(w(t),sum(w(t)
k
)×c+β
}
Listing 3: The message passing primitive instruction.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
278
bool Nrm (x, y , z)
{
length = x
2
+ y
2
+ z
2
if (length ≠ 0)
{
x=
x
/
length:
y=
y
/
length:
z =
z
/
length
}
else
{
x = random x
y = random y
z = 0.0
path-weight = 0.00001
Nrm (x , y , z)
}
}
Listing 4: Normalizing vectors.
bool PtV (p
i
, x)
{
for-each pos-L around device R
t
{
if (Q(p
i
) @ L > x)
{
path (R
t+1
) = (L
x
, L
y
, L
z
)
path-weight (R
t+1
) = 1.0
}
}
}
Listing 5: Detecting target indicators.
bool MvP (x , y , z)
{
for-each robotic-device R
t
{
if (R
t
= (x , y , z))
R
t+1
= (x+x
i
, y+y
i
, z+z
i
)
}
}
Listing 6: Robotic device movement.
Magnitudes of vectors are variable. They dictate
robotic devices’ movement steps. Normalizing these
vectors reset the magnitudes to 1, defining unit
robotic device steps. Listing 4 summarizes the
semantics for normalizing a vector. The control
routine receives the x, y, and z components of a vector
and use these values to find the length of the vector.
This length is non-zero when a robotic device has
neighbours. Components of the vector are divided by
this length. Isolated robotic devices yield vectors of
magnitude 0, after which the robotic devices follows
randomly picked direction vectors with depleted
confidence measures. Random vectors are recursively
normalized.
It is critical that robotic devices detect targets
(Cavalcanti and Freitas, 2005) in order to trigger
internal state changes. Points where key objects exist
in the simulation environment are marked by target
indicators (Cavalcanti and Freitas, 2005). Target
indicators are virtual chemicals set when the
environment is launched. A method is required with
which message passing robotic devices can detect
target indicators and appropriately interpret this into
vector information. This is not the first time vectors
have been used to interpret pheromone levels
(Chibaya, 2014). A magnitude of zero indicate that
the robotic device is not yet on target. Listing 5
describes target detection and conversion of related
information to vectors. It accepts two parameters, one
passing the ID of the target indicator and another
setting the lowest level of target indicators to trigger
changes in robotic devices’ actions. If detected, the
robotic device overwrites its vector by a vector
pointing to the location of the target indicators. This
upgrades confidence measures to the highest measure
possible, indicating absolute trust in the vector to the
target.
Movement is the robotic device’s last task in each
cycle. Listing 6 interprets the movement policies run
after orientation. Three parameters indicating the
offset of the chosen destination are received into the
routine. In these offset values, the z component is
always 0 as we operate in 2D.
Meta information stipulates each XSet’s precise
cardinality. However, there are moments when
robotic devices require fewer control routines than
stipulated. (NOp:) tells robotic devices to do nothing
when it becomes necessary. This is merely an empty
routine.
4 EXPERIMENTS SETUP
An experiment is administered in which to assess path
finding and path following properties in swarms
controlled by message passing and stigmergic XSets
(Chibaya, 2014).
The platform on which robotic devices are
assessed for path finding and path following abilities
is called an environment (Chibaya, 2014). In
computational terms, an environment is a grid of rows
and columns which intersect to form cells which we
regard as locations. A location is practically a tuple
which stores information such as target indicators.
For experimental purposes, we assume a 1000 × 1000
grid environment. Target and the starting point are
hard coded at particular locations to allow repeatable
tests.
Vector based Control Routines for Swarms of Path Finding Robotic Devices
279
Robotic devices are allowed to run for, as a case
study, 10,000 steps in which to score performances.
However, simulation time can be changed without
compromising the desired outcomes. Each swarm
consists of, as a case study, 5000 robotic devices.
A performance metric measures the extent to
which emergent behaviour is manifest as a result of
robotic devices using the control routines listed in an
XSet. Two performance metrics are of interest in this
study. First, quality of emergence measures
adherence of robotic devices to the schedule,
evaluating robotic devices’ engagement with the task
at hand (Werfel et al., 2006). On the other hand, speed
of emergence evaluates timeliness. Combined, the
two metrics yield an index of merit of the XSet used.
To measure speed, the time it takes the first
robotic device to find the target is determined. Time
is measured in iterations. Then, the time it takes the
last robotic device in the swarm to also find the target
is found. The time gap between these two time
intervals is the speed of emergence towards the target.
Speed of emergence towards the starting point is the
time gap between the times taken by the first and last
robotic device to complete round trips. The average
between speed of emergence towards the target and
speed of emergence towards the starting point is the
overall speed of emergence of the swarm. Ten
repeated simulations administered, before centrally
placed speed measures, are reported.
To determine quality of emergence, we set a time
frame in which successful trips of robotic devices in
each direction are counted and recorded. Ten repeated
tests are also administered in order to achieve
smoothened and centrally placed performance trends.
The index of merit is determined by scaling speed
and quality measures so that they lie in the range [0;
1]. Equation (14) shows how the average of the scaled
metrics is found, giving an index of merit of an XSet.
Index of merit = 0.5×((1-
S
/
T
) +
Q
/
T
) (14)
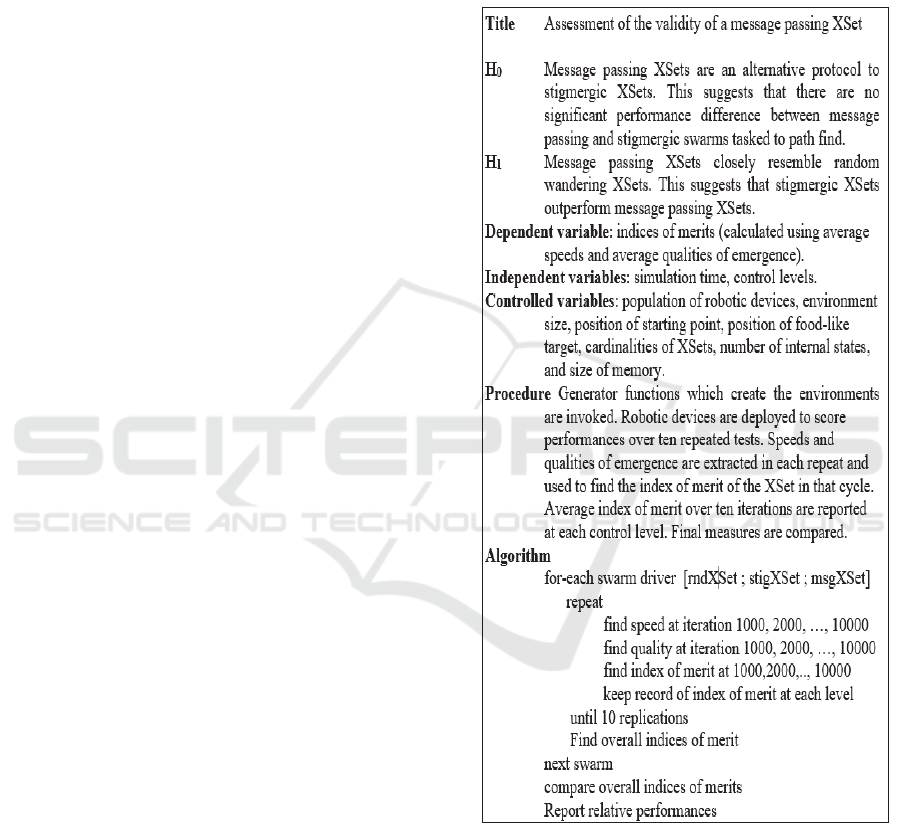
The hypothesis which drove the experiment
administered is: message passing XSets are a useful
alternative for controlling swarms of robotic devices
towards emergent behaviour. The null hypothesis
thereto is: there aren’t significant differences in
performance between swarms coordinated using
message passing and stigmergic XSets. The
dependent variables in this experiment are XSets’
indices of merits. Two independent variables are: the
time taken in simulation and the control levels at
which measures of emergence are extracted. In this
case, performance measures are extracted at intervals
of 1,000 iterations. All other variables are controlled,
including the population of robotic devices, size of
the environment, the positions of the starting point
and the food-like target, the cardinalities of XSets,
number of internal states, and the sizes of the memory
blocks supported by robotic devices. Listing 7
summarizes the design of the experiment, showing
the procedure followed.
Listing 7: Experiment design.
5 RESULTS
The key results reported are speeds of emergence,
qualities of emergence, and indices of merits of
message passing and stigmergic XSets. In these
results, measures of central tendencies and dispersion
are important. Correlations extracted at a 99% level
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
280

of confidence are also key. The sample size we use is
statistically small, so two-tailed correlation tests are
administered because we cannot tell, in advance, the
sign of the correlation coefficients we will get. The
critical correlation value we use is 0.765 when alpha
is 0.01. Absolute values of the correlation coefficient
above 0.765 indicate sufficient evidence to accept the
hypothesis that there are significant relationships
between the speeds and qualities of emergence yield.
Figure 3 compares the indices of merits yielded
from using the two XSets. The x- axis is marked by
the control levels. The y-axis shows the average
scaled indices of merits thereof. The speeds and
qualities of emergence found satisfy Kolmogorov-
Smirnoff tests for normality with a statistical p value
above 0.05. A correlation coefficient of 0.91 is
yielded when speed and quality of emergence in the
stigmergic category are compared, implying a strong
correlation between speed and quality of emergence
in that model. The message passing counterpart
yielded a correlation coefficient of 0.86 when the
same metrics are compared. Chances are therefore
slim that any generalized views we deduce from these
results would significantly differ from the trends and
relationships shown.
Figure 3: Comparisons between indices of merits.
We have sufficient evidence to accept the
hypothesis that the two XSets are alternatives to one
another, both achieving plausible outcomes. We
make the following additional observations:
The stigmergic XSet reaches a turning point in
performances with time in simulation, after
which swarm performances deplete. A turning
point in performances occurs when the
environment gets saturated with pheromone
levels which reverts robotic devices to a
random wandering mode. We noted in
(Chibaya, 2015) that pheromone dissipation
could be, to some extent, the remedy to this
flaw. On the contrary a message passing XSet
improves related swarm performances in
Sigmoid-like patterns. Related performances
gradually improve until robotic devices
converge on deterministic paths. Thus, while
extended time in simulation is detrimental to
stigmergic swarm performances, it allows
message passing swarms to build vector fields
with deterministic cues to the targets. Swarm
performances are therefore a function of time
in simulation in both cases.
Stigmergic control routines come in specific
sequences in order to yield good performances.
Similarly, message passing control routines are
executed sequentially. The configuration of the
two XSets is similar, connoting possibilities of
a generalized XSet.
Message passing and stigmergic XSets both
influence swarm behaviour. They are, both,
useful swarm drivers. This is a milestone in the
study of robotic systems.
The results provide sufficient evidence to support
the view that message passing XSets are an
alternative to stigmergic XSets. No significant
differences are observed between their performances,
with both XSets showing causal properties.
6 CONCLUSION
A new XSet for controlling swarms of robotic devices
towards desired formations is proposed. The new
XSet is inspired by the behaviours of message passing
agents. Controlling swarms of robotic devices
requires us to provide five meta data during the
configuration of the XSet. We need to provide the
alias name of the XSet, cardinality, number of
internal states supported, amount of memory, and the
separators used to demarcate the XSet’s entries. Six
routines form the vocabulary of message passing
XSets as follows:
(MsP:) – a control routine with which robotic
devices share vectors, finding resultant vectors
to follow next, updating their confidence
measures, and orientating in each step.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
12345678910
Indices of merits
Stigmergic Xset
Message passing Xset
Random wandering Xset
Vector based Control Routines for Swarms of Path Finding Robotic Devices
281

(PtV:) – a control routine for detecting target
indicators, updating confidence measures, and
orientating robotic devices towards the targets.
(MvP:) –a routine for relocating robotic
devices.
(Nrm:) – a routine for normalizing vectors.
(StS:)– a control routine which allows robotic
devices to conditionally flip between different
internal states.
(NOp:)– telling robotic devices to do nothing.
An experiment to evaluate the message passing
XSet for causal properties showed that this is an
alternative swarm control protocol to the stigmergic
version. Four contributions emanate from this work:
The design of the message passing XSet adds
to new developments towards practical use of
robotic device based swarm intelligent
systems.
The control routines used are creative, adding
relevant content to the robotic device control
and programming problem.
The metrics used to measure the performances
of XSets are innovative. These metrics can be
useful in verifying other forms of emergent
behaviours, opening up new research avenues
in areas related to quantification of emergency.
The statistical tests applied during validation of
the XSets and tests for normality on the results
are also innovative. Similar statistical tests may
inspire the development of more scientific and
deductive outcomes with positivism angles.
Although the general robotic device programming
problem is not resolved, this work brings us closer to
such generalization. It provides a baseline upon
which further investigations may arise. More so, the
work strengthens the foundation set when the
stigmergic XSets were identified. Importantly, the
investigations undertaken may soon inspire the
development of more generic control routines with
which robotic devices, in general, would engineer
predicable object assembly.
ACKNOWLEDGMENTS
We acknowledge support from the department of
Computer Science at Sol Plaatje University, for
allowing us time to work on this article, the brotherly
advices, and financial support, without which this
work would not have been a success. However,
professor Shaun Bangay remains our most inspiring
mentor ever.
REFERENCES
Chibaya, C. 2019. A Message Passing XSet for Path
Finding Robotic Devices. In the proceedings of the 1
st
International Multidisciplinary Information
Technology and Engineering Conference.
Chibaya, C. 2014. An investigation into XSets of primitive
behaviours for emergent behaviour in stigmergic and
message passing ant-like agents. A PhD thesis
submitted at Rhodes University. South Africa.
Chibaya, C. 2015. An XSet based protocol for coordinating
the behaviour of stigmergic ant-like robotic devices. In
the ACM International Conference Proceeding Series
and the SAICSIT’ 2015. South Africa.
Geer, P, McLaughlin, H,W, Unsworth, K. 2003. Cellular
lines: an introduction. In Discrete mathematics and
theoretical computer science.
Green, D, G.. 1994. Emergent behaviour in biological
systems. Complexity international.
Sanders, J, W, Smith, G. 2009. Refining emergent
properties. International Institute for software
technology. Electronic Notes in Theoretical Computer
Science.
Di Caro, G, Ducatelle, F, Gambardella, L,M. 2004.
AntHocNet: An adaptive nature-inspired algorithm for
routing in mobile ad hoc networks. Technical report
Dalle Molle Institute.
Negulescu, S,C, Barbat, B, E. 2004. Enhancing the
effectiveness of simple multi-agent systems through
stigmergic coordination. In the 4
th
symposium on
engineering of intelligent systems.
Bonaneau, E, Dorigo, M, Theraukaz, G. 1999. Swarm
Intelligence: From natural to artificial systems. Oxford.
Chibaya, C, Bangay, S. 2007. A probabilistic movement
model for shortest path formation in virtual ant-like
agents. In the ACM International Conference
Proceeding Series, and In SAICSIT 2007 on IT research
in developing countries.
Dorigo, M. 1992. Optimization, learning and natural
algorithms. A PhD thesis submitted to the Dipartimento
di Electronica, Politecnico di Milano. Milan, Italy.
Dorigo, M, Di Caro, G, Gambardella, L,M. 1999. Ant
algorithms for discrete optimization. In the Proceedings
of Artificial Life.
Nagpal, R. 2006. Self-Organizing shape and pattern: From
cells to robots. IEEE Intelligent Systems.
Nagpal, R, Kondacs, A, Chang, C. 2002. Programming
methodology for biologically-inspired self-assembling
system. In the Proceedings of the American Association
for Artificial Intelligence.
Rothemund, P, W, K. 2006. Folding DNA to create nano-
scale shapes and patterns. Computation and neural
systems and computer science.
Werfel, J. 2002. Autonomous multi-agent construction.
Amorphous projects. On-line on http://groups.csall.mit.
edu/mac/projects/amorphous.6.978/nal_nal.pdf.
Wehmer, R, Boyer, M, Loertscher, F, Sommer, S, Menzi.
2006. Ant navigation: one-way routes rather than maps.
Current biology. Elsevier Science Ltd.
ICINCO 2020 - 17th International Conference on Informatics in Control, Automation and Robotics
282

Ngo, V, T, Nguyen, A,D, Ha, H. 2005. Integration of
Planning and Control in Robotic Formations. In the
Proceedings of the 2005 Australian Conference on
robotics and Automation.
Spears, W, M, Spears, D,F, Zarzhitsky, D, Heil, R. 2004a.
Physicomimetics for mobile robot formations. In the 3
rd
International conference on autonomous agents and
multi agent systems.
Spears, W, M, Spears, D, F, Hamann, J, C, Heil, R. 2004b.
Distributed, physics-based control of swarms of
vehicles. Autonomous robots.
Spears, W, M, Spears, D, F, Zarzhitsky, D. 2005.
Physicomimetics positioning methodology for
distributed autonomous systems. In the Proceedings of
the government microcircuit applications and critical
technology conference, Intelligent Technologies.
Harris, D, M, J. 2007. Direct motion of a parallel-linkage
robot through the Jacobian. 12
th
IFToMM World
Congress, France.
Trianni, V, Dorigo, M. 2005, Self-Organisation and
communication in groups of simulated and physical
robots. Technical report: Université Libre de Bruxelles.
Biological Cybernetics.
Raijbhupinder, S,D, Harwinder, S, S, Amarpreet, S, G.
2010. Load Balancing of Ant Based Algorithm in
MANET. International journal of computer science
and technology.
Rodriguez, S, Salazar, R, McMahon, T, Amato, N, M.
2007. Roadmap based group behaviour: generation and
evaluation. Technical report: Parasol Lab, Computer
Science.
Panait, L, Luke, L. 2004a. A pheromone-based utility
model for collaborative foraging. In the 3
rd
International Joint Conference on Autonomous Agents
and Multi-Agent Systems.
Panait, L, Luke, L. 2004b. Ant foraging revisited. In the 9
th
International conference on simulation and synthesis of
living systems.
Panait, L, Luke, L. 2004c. Learning Ant Foraging
Behaviours. In the 9
th
International Conference on the
Simulation and Synthesis of Living Systems.
Parunak, H, V, D. 2005. A survey of environments and
mechanisms for human-human stigmergy. In the 2
nd
International conference on environments for Multi
Agent Systems.
Wikipedia. 2004. Line-line intersection. Wikipedia.
Cavalcanti, A, Freitas, R, A. 2005. Nanorobotics control
design: A collective behaviour approach for medicine.
IEEE Transactions on NanoBioScience.
Werfel, J, Nagpal, N, Seung, H, S. 2006. Ant-hills built to
order: automating construction with artificial swarms.
A PhD thesis submitted to the MIT.
Gengan, D, Schoeman, M, A, Van der Poll John, A. 2014.
An ant-based mobile agent approach to resource
discovery in grid computing. In the proceedings of the
SAICSIT 2014.
Vector based Control Routines for Swarms of Path Finding Robotic Devices
283
