
Fuzzy Multi-objective Optimization for Ride-sharing Autonomous
Mobility-on-Demand Systems
Rihab Khemiri
and Ernesto Exposito
Univ. Pau & Pays Adour, E2S UPPA, LIUPPA, EA3000, Anglet, 64600, France
Keywords: Ride-sharing Autonomous Mobility-on-Demand Systems, Multi-objective Possibilistic Linear Programming,
Fuzzy Logic, Goal Programming, Dispatching, Rebalancing.
Abstract: In this paper, we propose a novel three-phase fuzzy approach to optimize dispatching and rebalancing for
Ride-sharing Autonomous Mobility-on-Demand (RAMoD) systems, consisting of self-driving vehicles,
which provide on-demand transportation service, and allowing several customers to share the same vehicle at
the same time. We first introduce a new multi-objective possibilistic linear programming (MOPLP) model for
the problem of dispatching and rebalancing in RAMoD systems considering the imprecise nature of the
customer requests as well as two conflicting objectives simultaneously, namely, improving customer
satisfaction and minimizing transportation costs. Then, after transforming this possibilistic programming
model into an equivalent crisp multi-objective linear programming (MOLP) model, the Goal Programming
(GP) approach is used to provide an efficient compromise solution. Finally, computational results show the
practicality and tractability of the proposed model as well as the solution methodology.
1 INTRODUCTION
Nowadays, urban systems are characterised by the
expansion of cities and by the growth of their
population. This affects the current mobility trends
marked by the continued growth of demand for
personal mobility as well as the increasing of
privately owned automobile.
This trend leads to many social and environmental
severe problems including traffic congestion,
increased travel times, air pollution as well as the
growth of the greenhouse gas emissions, especially in
the densely populated areas with limited space for
parking and road infrastructure.
To deal with these problems, an efficient
transportation system that responds to the mobility
demands of people and that is more sustainable,
reliable and efficient becomes essential.
In this context, Autonomous Mobility-on-
Demand (AMoD) systems represent a very promising
solution in meeting these needs. This emerging
system is a fleet of self-driving electric vehicles
designed to provide personal on-demand
transportation service for passengers. AMoD systems
offer many potential benefits such as minimizing
pollution, avoiding the need for further routes and
parking spaces. Moreover, autonomous vehicles may
be safer than traditional vehicles as they can avoid
accidents due to human errors, well known to be the
main reason of traffic accidents.
These several advantages have led recently a
number of works to investigate the potential of
AMoD systems. A key challenge in this context is the
design of dispatching strategies that entail to
optimally assign the customers to vehicles, thus
satisfying the customer's request at each given station
and at each time period. To do this, the number of
vehicles available at each station and each period
must satisfy customer requests.
Nevertheless, when some stations are more in
demand than others, at the end of the trip, vehicles
will tend to be accumulated at these stations and
become exhausted at others. This can lead to a spatial-
temporal distribution of vehicles, which will probably
not be in line with the distribution of the customer
requests in the following periods.
Therefore, it becomes inevitable to devise
efficient policies to deal with this problem of
imbalance. Such rebalancing policies entail
redistributing empty vehicles from overload stations
to underloaded stations. However, AMoD systems
might aggravate the congestion problem given the
presence of these empty vehicles (Tsao et al., 2019).
284
Khemiri, R. and Exposito, E.
Fuzzy Multi-objective Optimization for Ride-sharing Autonomous Mobility-on-Demand Systems.
DOI: 10.5220/0009779602840294
In Proceedings of the 15th International Conference on Software Technologies (ICSOFT 2020), pages 284-294
ISBN: 978-989-758-443-5
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

This has prompted some AMoD systems to integrate
the emerging transportation paradigm of ride-sharing
to improve traffic flow.
Another important challenge is to deal well with
rapidly varying customer requests, given several real-
world constraints. Accordingly, it becomes
mandatory to forecast customer requests to compute
efficient strategies, having the robustness to
inaccuracies and uncertainties due to several external
factors such as traffic and weathers.
These various challenges have recently led to a
considerable amount of studies to address the
potential of AMoD systems. However, the majority
of these researches do not allow easy to account for
real-world phenomena such as the uncertain futures
of customer demand, which limits their practical
applications.
Although a few recent studies have been
developed to cope with demand uncertainty, the latter
are usually based on probability distributions, which
requires knowledge of historical data. When such
information was lacking, the Fuzzy Set Theory
(Zadeh, 1978) and the Possibility Theory (Dubois and
Prade, 1988; Zadeh, 1965) can help to handle
epistemic uncertainty.
To the best of our knowledge, fuzzy logic has
never been used to model the uncertainty in the
context of AMoD systems.
The aim of this paper is to present a novel fuzzy
approach for dispatching and rebalancing RAMoD
systems. Specifically, the paper has three important
contributions. First, it introduces a MOPLP model
which contemplates the uncertainty affecting future
demand. Two primary goals are considered
simultaneously in the MOPLP model, namely,
improving customer satisfaction and minimizing
transportation costs. Second, in order to find an
efficient compromise solution to the proposed
MOPLP model, we suggest the exploitation of the
well-known goal programming approach (Charnes
and Cooper, 1961), which integrates the desire of the
decision-maker with the logic of optimization to
satisfy various goals (Pati et al., 2008). Third, we
demonstrate the applicability of our proposed
approach through numerical computations.
The remainder of this article is organized as
follows. In the next section, we briefly review
existing works and present their limitations. Section
3 illustrates some fundamental concepts used in this
work. In section 4, we present the considered
dispatching and rebalancing problem in RAMoD
systems. In section 5, the proposed multi-objective
possibilistic linear programming model for RAMoD
systems is developed. In section 6, we exploit
appropriate strategies for converting the proposed
fuzzy model into an equivalent crisp one. Section 7
aims at finding an efficient compromise solution for
the problem, thus exploiting the goal programming
approach. We validate the proposed three-phase
approach through numerical tests being exploited in
Section 8. Finally, section 9 concludes the paper and
provide future directions.
2 RELATED WORK
The problem of dispatching and rebalancing has
received great attention over the last few years. The
proposed studies can be classified into three main
approaches, namely, simulation-based models;
queuing-theoretical models and model predictive
control (MPC) algorithms.
Simulation-based models (Hörl et al., 2018; Levin
et al., 2017; Maciejewski et al., 2017; Javanshour et
al., 2019) can accurately describe AMoD systems, but
being unable to provide optimal solutions.
Queuing-theoretical models (Zhang and Pavone,
2015; Zhang and Pavone, 2016; Iglesias et al., 2019;
Belakaria et al., 2019) have the advantage of
capturing the uncertainty of the customer requests.
These models are based on the Jackson network
concept (Serfozo, 2012), in which all arrivals at each
queuing station should follow a Poisson process
(Moran, 1952). This concept assumes constant rates
of occurrence of each random variable. That is, if the
random variable is customer’s arrival times, it
assumes customers arrive at stations at a constant rate
(Javanshour et al., 2019). However, in reality, the
customer arrival process for the various origin–
destination pairs is time-variant nature. Therefore, we
can deduce that the Queuing-theoretical models
prevent the AMoD system modelers from capturing a
realistic vision into these systems.
In contrast, Model predictive control (MPC)
algorithms (Zhang et al., 2016; Alonso-Mora et al.,
2017 ; Iglesias et al., 2018 ; Tsao et al., 2018 ; Tsao
et al., 2019) can efficiently accommodate time-
varying future demand. However, the majority of
existing MPC algorithms assume that future customer
demand is deterministic and the rare studies that
accommodate uncertainty mainly suggest the use of
stochastic programming. The probabilistic reasoning
approaches are usually based on evidence/data
recorded in the past. However, in many practical
situations, this evidence/data is unavailable or
subjectively specified, and the standard probabilistic
approach would not be appropriate to deal with them.
Thus, Fuzzy set theory and possibility theory provide
Fuzzy Multi-objective Optimization for Ride-sharing Autonomous Mobility-on-Demand Systems
285

an appropriate framework to handle uncertainty in
such situations. Accordingly, it has been successfully
used to model and treat uncertainties in many fields
such as supply chain planning (Khemiri et al., 2017;
Nemati and Alavidoost, 2019; Lima-Junior and
Carpinetti, 2020), Business Process modelling
(Yahya et al., 2017; Sarno et al., 2020), web services
(Rhimi et al., 2016; Bagga et al., 2019), image
processing (Ali and Lun, 2019; Nagi and Tripathy,
2020), etc.
Despite all this progress, the fuzzy logic and the
possibility theory have never been exploited to handle
uncertainties in AMoD systems.
To the best of our knowledge, this paper is the first
one to leverage the strengths of such techniques and
introduce a novel strategy for solving the dispatching
and rebalancing decisions problem with imprecise
travel demand in RAMoD systems.
In the next section, the basic concepts of the fuzzy
logic are provided.
3 THEORETICAL
BACKGROUND
This section briefly outlines the fuzzy set theory, the
triangular fuzzy numbers and the goal programming
method used in this paper.
3.1 Fuzzy Set Theory
Fuzzy set theory was originally introduced by Zadeh
(Zadeh, 1965) to deal with the imprecision,
uncertainty, and vagueness of subjective information.
From a mathematical point of view, a fuzzy set is
characterized by a membership function. Such a
function attributes to each object in the fuzzy set a
specific grade of membership ranging from zero to
one.
In this study, triangular fuzzy numbers are used to
represent the imprecise data. As shown in Figure 1, a
triangular fuzzy number 𝑍
~
can be represented by the
triplet (a, b, c) where a, b, c are the most pessimistic,
the most possible and the most optimistic value of 𝑍
~
.
The triangular fuzzy number 𝑍
~
can be represented
by the following membership function:
μ
x
⎩
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎧
0, xa
, axb
, bxc
0 , xc
(1)
Figure 1: The triangular possibility distribution of 𝑍
~
.
3.2 Goal Programming
There are several methods in the scientific literature
for dealing with multi-objective models. Among
them, the goal programming (GP) method which is
originally developed by Charnes et al. (Charnes and
Cooper, 1961) and successfully used in several
problems (Lee and Kim, 2000; Amin et al., 2019;
Colapinto et al., 2020).
The popularity of this method is based on its
mathematical flexibility, its robustness, and its
accuracy.
The goal programming method consists in
introducing for each criterion a goal to be achieved
and to identify the solution that minimizes the sum of
the deviations from these goals.
Several variants of the GP have been proposed in
the literature. Here we use the Weighted Goal
Programming (WGP) method. The WGP can be
represented as follows:
Min
∈
w
δ
w
δ
(2)
Subject to:
C
(x) 0 , l1,2,..,L
F
x
- δ
δ
= g
, i1,2,..,n
δ
,δ
0
Where:
C
(x) is the set of constraints.
δ
and δ
are respectively the positive and
negative deviation from the target value g
.
w
and w
are respectively the weight
attached to the positive and negative deviation.
F
x
is the evaluation of the solution x against
the criterion i.
𝐠
𝐢
is the aspiration level of the objective
function i.
ICSOFT 2020 - 15th International Conference on Software Technologies
286
4 PROBLEM FORMULATION
Despite the major progress that has occurred in recent
years, these various initiatives do not take into
account the specificities of the low-density areas. In
the Tornado Mobility research project (Tornado,
2020), that we are working on, the objective is to
study the interaction between autonomous vehicles
and connected intelligent infrastructures for serving
mobility in low population density areas.
For this purpose, we consider an urban area
discretized into multiple stations and served by
several on-demand vehicles. Each vehicle can serve
one or more passengers without exceeding their
capacity. The considered fleet of vehicles is
characterized by a high level of heterogeneity:
transportation costs, speeds, and capacities of each
vehicle can be different.
In the context of Tornado project, customers first
request transportation from a pickup to a drop off
location in the predefined urban area via a mobile
application.
If there are available vehicles, one of them will be
dispatched to drive this passenger towards its
destination. Instead, if there are no available vehicles,
the user instantly leaves the system (i.e. without any
waiting time). Therefore, as in (Zhang and Pavone,
2016; Iglesias et al., 2019), our RAMoD system
operate according to the passenger loss model. Such
a model is well suited for systems where a high degree
of service is desired (Iglesias et al., 2019).
At the end of the trip, the vehicle could be
dispatched to accomplish other mobility demands. It
could also rebalance itself or even park in the drop-
off station for a certain period of time.
For simplicity, it is assumed that each station has
sufficient space so that vehicles can immediately be
parked and recharged at all times.
Unlike traditional approaches, the proposed
model does not assume complete knowledge about
future customer demand; instead, it assumes that such
critical parameters are estimated by the decision-
maker using Triangular fuzzy numbers.
Finally, it is assumed that the time is discretized
into an ordered set of time periods.
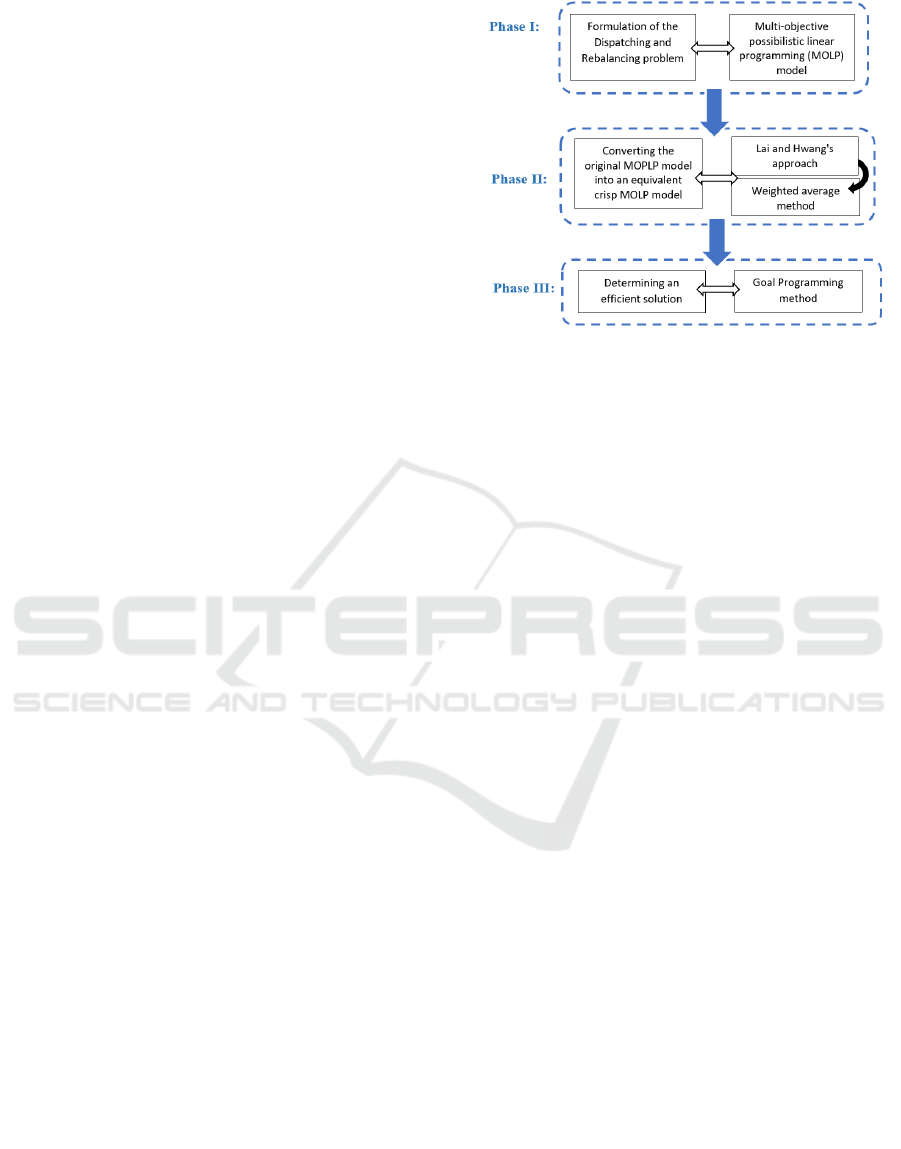
To deal with this challenging problem, we devise
a three-phase approach, where the main steps are
presented in Figure 2 and detailed in the following
sections.
Figure 2: Framework of the proposed approach.
5 PHASE I: PROPOSED MULTI
OBJECTIVE POSSIBILISTIC
LINEAR PROGRAMMING
MODEL
5.1 Notation
The set of indices
₋ S: Number of stations (s = 1, 2, …, S).
₋ V: Number of vehicles (v = 1, 2… V).
₋ T: Number of time periods (t = 1, 2…, T).
Decision variables
₋ Miss
v,t
: Binary variable indicating if vehicle
v is on mission during period t.
₋ Park
v,t,s
: Binary variable indicating if
vehicle v is parked in station s during period
t.
₋ Miss_T
v,s1,s2,t1,t2
: Binary variable indicating
if vehicle v is on customer transport mission
traveling from station s1 to station s2
beginning at period t1 and arriving at period
t2.
₋ Miss_R
v,s1,s2,t1,t2
: Binary variable indicating
if vehicle v is on a rebalancing mission
traveling from station s1 to station s2
beginning at period t1 and arriving at period
t2.
₋ S_Cr
t,s1,s2
: The number of satisfied customer
requests traveling from station s1 to station
s2 departing at time period t.
Certain parameters:
₋ Dist
s1, s2
: distance between stations s1 and s2
(considering the shortest way).
Fuzzy Multi-objective Optimization for Ride-sharing Autonomous Mobility-on-Demand Systems
287

₋ Cap
v
: Transport capacity of the vehicle v.
₋ SP
v
: speed of the vehicle v.
₋ Tr_cost
v
: transportation cost of the vehicle v.
₋ Local_init
v,s
: represents the initial
availability of vehicle v at station s. If
vehicle v is available at station s in the first
periode, Local_init
v,s
=1 and 0 otherwise.
Fuzzy parameters:
₋ 𝑪𝒓
~
t,s1,s2
: number of customer requests who
wish to travel from station s1 to station s2
departing at time period t.
5.2 Objective Functions
Objective 1: Improving customer satisfaction,
which is to minimize the number of lost
customer requests.
Minimize LCr
~
=
∑∑
𝐶
,
r
~
t,s1,s2
-
S
_
C
r
t,s1,s2
(3)
Objective 2: Minimizing the overall
transportation cost.
Minimize TC=
∑
∑∑
Tr
,
,
_cost
v
(4)
*(Miss_T
v,s1,s2,t1,t2
+ Miss_R
v,s1,s2,t1,t2
)* Dist
s1
, s2
5.3 Model Constraints
S_Cr
t
, s1, s2
≥ 0 and integer ∀t , ∀s1, s2 ϵ [1, S] (5)
Miss
v,t
, Park
v,t,s
, Miss_T
v,s1,s2,t1,t2
,
Miss_R
v,s1,s2, t1, t2
ϵ [0,1] ∀t, v, s, s1, s2, t1, t2
(6)
Equations (5) and (6) guarantees the non-negativity
of the various decision variables: S_Cr
t,s1,s2
is an
integer, while other variables are binary.
∑
P
ark
v,t, s
+ Miss
v, t
= 1 ∀v, t
(7)
Equation (7) models the two possible states each
autonomous vehicle can take namely parked at a
station and be on a mission from one station to
another. On the other hand, this constraint ensures
that a vehicle can have only one state at any one time.
Miss
v,t
=
∑∑
M
,
,
iss_T
v,s1,s2,t1,t2
+ Miss_R
v,s1,s2,t1,t2
∀v, t
(8)
When a vehicle is on a mission, two possible
actions can be achieved i) transport one or more
customers from one station to another, and ii) travel
without customers for rebalancing the system. These
actions are modeled using equation (8), which also
guarantees that the vehicle can only perform one
action at a time.
Miss_R
v,s1,s2,t1,t2
≤ Park
v,t1-1,s1
+
∑
M
iss_R
v,s3,s1,t3,t1-1
+
∑
M
iss_T
v,s4,s1,t4,t1-1
∀ v, s1, s2, t1>1, t2 = t1 + (Dist
s1,s2
/ SP
v
),
t3=
t
-(Dist
s3
,
s1
/SP
v
) -1, t4 = t1-(Dist
s4
,
s1
/SP
v
)-1
(9)
Miss_T
v,s1,s2,t1,t2
≤ Park
v,t1-1,s1
+
∑
M
iss_R
v,s3,s1,t3,t1-1
+
∑
M
iss_T
v,s4,s1,t4,t1-1
∀ v, s1, s2, t1>1, t2 = t1 + (Dist
s1,s2
/ SP
v
),
t3=t1-(Dis
t
s3
,
s1
/SP
v
)-1, t4 = t1-(Dis
t
s4
,
s1
/SP
v
)-1
(10)
When vehicle v is on a mission traveling from
station s1 to station s2 beginning at period t1, it is
necessary that v is physically located in station s1 at
the beginning of period t1. In other words, either the
vehicle v i) arrived at a station during the last period
(i.e. Miss_R
v,s3,s1,t3,t1-1
=1 Or Miss_T
v,s4,s1,t4,t1-1
=1 ) , or
ii) parked at a station during the last period (i.e.
Park
v,t-1,s1
=1 ). The equations (9) and (10) ensure that
this constraint is respected respectively for
rebalancing missions and customer transport
missions.
Park
v,t,s
≤ Park
v, t-1,s
+
∑
M
iss_R
v,s1,s,t1,t-1
+
∑
M
iss_T
v,s2,s,t2,t-1
∀v, s, t >1, t1=t-(Dist
s1,s
/ SP
v
)-1,
t2=t+
(
Dist
s2,s
/SP
v
)
-1
(11)
Equation (11) guarantees that if a vehicle v is
parked at a station s during a time period t (i.e. Park
v
,
t,s
=1), it is necessary that it be physically located in s at
the beginning of t (i.e. Park
v,t-1,s
+ Miss_R
v,s1,s,t1,t-1
+
Miss_T
v,s2,s,t2,t1-1
=1).
Park
v,t,s
+ Miss_T
v,s,s1,t,t1
+ Miss_R
v,s,s2,t,t2
≤ Local init
v,s
∀v, s, t=1, s1, s2, , t1=t+(Dist
s,s1
/ SP
v
),
t2=t+(Dis
t
s
,
s2
/
SP
v
)
(12)
Equation (12) indicates that a vehicle may only be
parked in a station s during the first period (i.e.
Park
v,1,s
=1) if it is initially available at this station (i.e.
Local_init
v,s
=1). Besides, a vehicle v may only travel
on a rebalancing mission (i.e. Miss_R
v,s,s1,1,t1
=1) or a
customer(s) transport mission (i.e. Miss_T
v,s,s1,1,t1
=1)
if it is initially available at this station
(Local_init
v,s
=1).
S_Cr
t1,s1,s2
≤
∑
M
iss_T
v, s1, s2, t1, t2
* Cap
v
∀s1, s2, t1, t2= t1 + (Dist
s1,s2
/SP
v
)
(13)
Equation (13) ensures that the number of satisfied
customer requests traveling from station s1 to station
s2 departing at time period t1 can not exceed the total
capacity of the vehicles transporting customers from
station s1 to station s2 beginning at period t1.
S_Cr
t, s1, s2
≤ Cr
~
t, s1, s2
∀t, s1, s2
(14)
Finally, equation (14) guarantees that vehicles
transporting customer(s) from station s1 to station s2
ICSOFT 2020 - 15th International Conference on Software Technologies
288

beginning at time period t cannot transport more
customers than it has been requested.
In this study, it is assumed that the imprecise
customer demand in the first objective function and
constraint (14) is modeled using a triangular-shaped
possibility distribution. As explained in section 3,
triangular possibility distribution 𝐶𝑟
can be
represented by the triplet (Cr
p
, Cr
m
, Cr
o
) where Cr
p
,
Cr
m
and Cr
o
are the most pessimistic, the most
possible and the most optimistic value of 𝐶𝑟
.
6 PHASE II: STRATEGY FOR
PROCESSING THE FUZZINESS
CUSTOMER REQUESTS
6.1 Treating the Imprecise Objective
Function
Given the imprecise customer’s request coefficients
in the first objective function, it is generally not
possible to determine an ideal solution to the problem
constrained by (3)-(14).
In the scientific literature, several approaches for
identifying compromise solutions are proposed
(Luhandjula, 1989; Sakawa and Yano, 1989; Tanaka
and Asai, 1984; Tanaka et al., 1984; Lai and Hwang,
1992). As mentioned by Hsu and Wang in (Hsu and
Wang, 2001), the first four approaches (Luhandjula,
1989; Sakawa and Yano, 1989; Tanaka and Asai,
1984; Tanaka et al., 1984) are based on restrictive
assumptions and are generally difficult to implement
in practice, we then use Lai and Hwang's approach
(Lai and Hwang, 1992; Liang, 2006).
Since the imprecise customer demand has
triangular possibility distributions, the
𝐿𝐶𝑟
~
objective
function would also have a triangular possibility
distribution. This imprecise objective is represented
by the three important points (LCr
p
, 0), (LCr
m
, 1) and
(LCr
o
, 0), geometrically. Therefore, minimizing the
fuzzy objective can be achieved by pushing these
critical points in the direction of the left-hand side.
According to Lai and Hwang’s approach solving
this problem becomes the process of minimizing
LCr
m
, maximizing (LCr
m
- LCr
p
) and minimizing
(LCr
o
- LCr
m
). In this way, our first objective function
can be transformed into a multiple crisp objective as
follows:
Minimize Z
1
=LCr
m
LCr
m
=
∑∑
,
Cr
,,
- S_Cr
t,s1,s2
(15)
Maximize Z
2
= LCr
m
- LCr
p
LCr
m
- LCr
p
=
∑∑
,
Cr
,,
- Cr
,,
- S_Cr
t,s1,s2
(16)
Maximize Z
3
= LCr
o
- LCr
m
LCr
o
- LCr
m
=
∑∑
,
Cr
,,
- Cr
,,
- S_Cr
t,s1,s2
(17)
6.2 Treating the Fuzzy Constraint
Recalling that equation (14) considers the situation in
which the crisp left-hand side is compared to the
fuzzy right-hand side. In this study, we implement the
well-known weighted average method for dealing
with this situation and approximating the 𝐶𝑟
~
parameter by crisp number. This method is originally
introduced by (Lai and Hwang, 1992) and has been
successfully used in several research studies (Wang
and Liang, 2005; Liang, 2006; Torabi and Hassini,
2009; Khemiri et al., 2017a) due to its simplicity and
efficiency in defuzzification.
To do so, we first need to determine a minimal
acceptable possibility degree of occurrence for the
fuzzy/imprecise parameter, α. Then the original fuzzy
constraint (14) can be represented by a novel crisp
constraint as follows:
S_Cr
t,s1,s2
≤ w
1
Cr
,,,
+w
2
Cr
,,,
+w
3
Cr
,,,
∀t, s1, s2
(18)
Where w
1
+ w
2
+ w
3
= 1, and w
3
, w
2
and
w
1
denote
respectively the weights of the most optimistic, the
weights of the most possible and the weights of the
most pessimistic of the fuzzy demand. In practice, the
values of these weights, as well as the minimal
acceptable possibility degree α, can be defined
subjectively based on the knowledge and experience
of the decision-maker.
In our work, we adopt the concept of most likely
values, which is widely used in the literature (Lai and
Hwang, 1992). According to this concept, the most
pessimistic and optimistic values required a lower
weight than the one assigned to the most possible
value. Thus, as in (Lai and Hwang, 1992) we set these
parameters to: w
1
= w
3
= 1/6 ; w
2
= 4/6 and α = 0.5.
7 PHASE III: GOAL
PROGRAMMING-BASED
SOLUTION APPROACH
In the previous section, the original fuzzy MOLP
model was converted into an equivalent auxiliary
Fuzzy Multi-objective Optimization for Ride-sharing Autonomous Mobility-on-Demand Systems
289

crisp multi-objective linear programming model. To
deal with this multi-objective model, we use the
Weighted Goal Programming (WGP) method,
introducing specific weights for each criterion.
Accordingly, we can reformulate our problem as
follows:
Minimize F
GP
F
GP
=W
Z1
* δ
+W
Z2
* δ
+W
Z3
*δ
+W
Z4
*δ
(19)
Subject to:
(5) - (13), (18)
𝑍
- 𝛿
= 𝑍
∗
(20)
𝑍
+ 𝛿
= 𝑍
∗
(21)
𝑍
+ 𝛿
= 𝑍
∗
(22)
TC - 𝛿
=𝑇𝐶
∗
(23)
Where:
𝑍
∗
is the goal calculated using the
mathematical model with objective function
(15) subject to constraints (5) - (13), (18) and
𝛿
is the positive deviation from this goal.
𝑍
∗
is the goal calculated using the
mathematical model with objective function
(16) subject to constraints (5) - (13), (18) and
𝛿
is the negative deviation from this goal.
𝑍
∗
is the goal calculated using the
mathematical model with objective function
(17) subject to constraints (5) - (13), (18) and
𝛿
is the negative deviation from this goal.
𝑇𝐶
∗
is the goal calculated using the
mathematical model with objective function
(4) subject to constraints (5) - (13), (18) and
𝛿
is the positive deviation from this goal.
W
Z1
,
W
Z2,
W
Z3
and W
Z4
are the importance
weights of the various goals, usually
determined by the decision makers such that
W
Z1
+ W
Z2
+W
Z3
+W
Z4
=1.
8 SIMULATION RESULTS
In this section, we display two sets of simulation
results to illustrate the validity and applicability of the
proposed approach. First, we demonstrate that the
dispatching and rebalancing problem in RAMoD
systems can indeed be resolved using the proposed
three-phase approach, especially in the presence of
imprecise customer requests. Then, we compare the
performance of our methodology with other dispatch
strategies by varying customer demand over time.
For all experiments, we consider a fleet size of 15
autonomous vehicles and 5 stations. The planning
horizon is decomposed into 10 periods. These periods
correspond to 10 different predicted request demands
with triangular distributions, synthesized in Table 1.
Initially, the vehicles were distributed equally among
the various stations, i.e. 3 vehicles for each station.
For reason of simplification, we consider that the
travel time between two stations is one time step. The
capacity of the vehicles is characterized by a high
degree of heterogeneity which varies from a
maximum capacity of a single passenger to a
maximum capacity of 8 passengers. Additionally, we
consider for simplicity that the weights of the various
criteria are the same (i.e. W
Z1
= W
Z2
=W
Z3
=W
Z4
=1/4).
For all simulations, the proposed approach has
been implemented using the LINGO optimization
package.
8.1 Detailed Results for the Proposed
Approach
Figure 4 summarizes the results provided by the
proposed approach by detailing vehicle statuses
according to the planning horizon. We remind that the
vehicle can be parked at one station, be on a
customer(s) transport mission and be on a rebalancing
mission. For the last two states, the departure and
arrival stations were also mentioned. These decisions
are guided by the criteria of the customer satisfaction
maximization and the transportation cost
minimization at each period of the planning horizon.
Indeed, we find that the increase in the cost of
transporting a vehicle leads to not using it (i.e. staying
parked in the station) if customer demand can be
satisfied by vehicles with a lower transport cost. For
example, for the first period, customer demands were
satisfied with the various stations. In particular for
station S3, this fuzzy demand has been satisfied by
using V7 and V8 with the use of ride-sharing, while
the V9 remains parked in S3 because it has much
higher transport cost. Also during the second period,
the vehicle V12 remains parked in the station S4 since
customer demand has been satisfied by vehicles with
a lower transport cost.
With the increase in customer demands during the
third and fourth periods and guided by the criterion of
maximizing customer demands satisfaction, all
vehicles in the fleet were launched on missions, even
the most costly ones.
However, beyond the fifth period,
the mobilization of all vehicles remains insufficient to
ICSOFT 2020 - 15th International Conference on Software Technologies
290
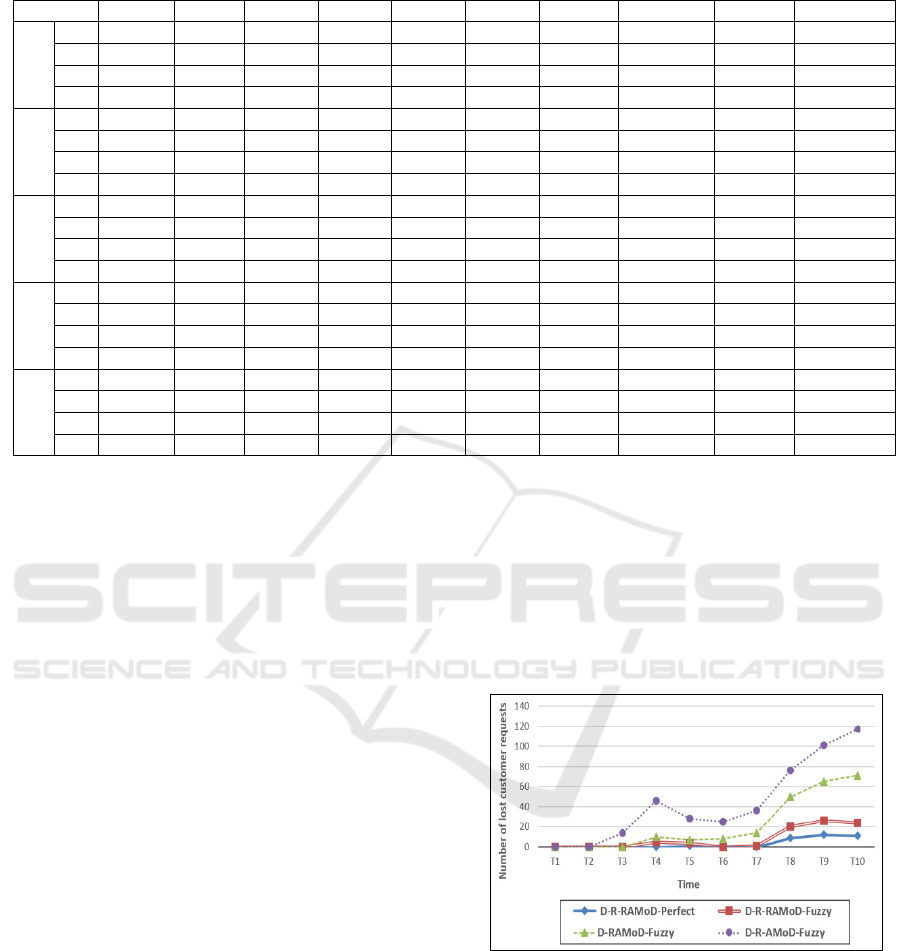
Table 1: Fuzzy demand for each period.
SiS
j
T1 T2 T3 T4 T5 T6 T7 T8 T9 T10
S1
S2
(
0,1,2
)
(
0,1,2
)
(
0,1,2
)
(
4,5,6
)
(
1,2,3
)
(
3,4,5
)
(
6,8,10
)
(
4,5,6
)
(
4,5,6
)
(
1,3,5
)
S3
(
1,2,3
)
(
0,1,2
)
(
0,1,2
)
(
2,3,4
)
(
1,3,5
)
(
1,2,3
)
(
4,5,6
)
(
2,4,6
)
(
3,5,7
)
(
4,5,6
)
S4 (0,1,2) 0 (2,3,5) (2,4,6) (2,3,4) (4,5,6) (4,5,6) (2,4,6) (3,6,9) (2,3,4)
S5 0 0 (1,2,3) 0 (2,4,6) (2,4,6) (2,4,6) (10,12,14) (6,8,10) (2,3,4)
S2
S1 (0,1,2) (0,1,2) (1,2,3) 0 (1,2,3) (6,7,8) (1,2,3) (1,2,3) (6,8,10) (2,5,8)
S3
(
0,1,2
)
(
0,1,2
)
(
3,4,5
)
0
(
0,1,2
)
(
1,2,3
)
(
3,4,5
)
(
1,2,3
)
(
1,2,3
)
(
2,4,6
)
S4
(
0,1,2
)
0
(
0,1,2
)
(
0,1,2
)
(
3,4,5
)
0
(
1,3,5
)
(
1,2,3
)
(
3,5,7
)
(
4,5,6
)
S5 0 0
(
0,1,2
)
(
3,4,5
)
0 0 0
(
1,2,3
)
(
3,5,7
)
(
4,5,6
)
S3
S1 (1,2,3) (0,1,2) (2,4,6) (1,4,7) (1,2,3) (2,5,8) 0 (3,4,5) (3,5,7) (10,13,16)
S2 (0,1,2) (0,1,2) (1,2,3) (2,4,6) (1,2,3) (0,2,4) (1,2,3) (0,1,2) (0,1,2) (2,3,4)
S4 0
(
0,1,2
)
(
1,2,3
)
(
2,4,6
)
(
1,2,3
)
0
(
3,4,5
)
(
1,2,3
)
(
1,3,5
)
(
2,5,8
)
S5 0 0
(
1,2,3
)
0 0 0 0
(
2,3,4
)
0 0
S4
S1
(
0,1,2
)
(
0,1,2
)
0
(
0,1,2
)
0 0 0 0 0 0
S2 (0,1,2) (0,1,2) 0 0 0 0 0 0 0 0
S3 (0,1,2) (0,1,2) (0,1,2) (5,7,9) 0 0 0 0 0 0
S5 0 (0,1,2) (0,1,2) (1,2,3) 0 0 0 0 0 (2,5,8)
S5
S1 0
(
0,1,2
)
(
1,3,5
)
(
0,1,2
)
(
1,2,3
)
0 0 0
(
1,2,3
)
(
1,2,3
)
S2 0
(
0,1,2
)
0
(
0,2,4
)
(
1,2,3
)
(
1,4,7
)
0 0 0 0
S3 0
(
0,1,2
)
0
(
3,4,5
)
0 0 0 0 0 0
S4 0 0 0 (1,3,5) 0 0 (3,5,7) 0 0 0
satisfy customer demand, especially when some
stations are more in demand than others, at the end of
the trip, vehicles are accumulating in these stations
and depleting in the others. This justifies the use of
rebalancing decisions from overloaded stations to
under loaded stations.
The rebalancing decisions are also subject to the
cost minimization criterion. Indeed, the least
expensive vehicles will be assigned first to
rebalancing missions
8.2 Performance of the Proposed
Approach
To evaluate the performance of the proposed
approach (D-R-RAMoD-Fuzzy), we conducted a
simulation study comparing it to other dispatch
strategies. These latter are concretely three versions
of our proposed approach:
D-R-RAMoD-Perfect: The dispatching and
rebalancing approach proposed in previous
sections based on an exact customer request as
it appears in the data set as a "forecast" for the
next 10 time periods. This is an efficient
strategy to find the optimal dispatching and
rebalancing policies for the case when the
customer request is known in advance. Thus, it
can be used for providing performance upper
bounds of the system.
D-R-AMoD-Fuzzy: This version uses the
same model described in section 5 for single
capacity vehicles (without the use of ride
sharing).
D-RAMoD-Fuzzy: This version is exclusively
concerned with the “Dispatching” problem and
vehicles do not rebalance in any situation.
The summary results of this comparison are
presented in Figure 3, illustrating the number of lost
customer requests for each dispatch strategies as a
function of time.
Figure 3: The number of lost customer requests for each
dispatch strategies as a function of time.
As expected, the strategy with exact customer
requests has the best performance, with a minimum
number of lost requests and a reduced transport cost.
The "D-R-AMoD-Fuzzy" strategy has the worst
performance, with mean lost requests sixfold than
that of "D-R-RAMoD-Perfect" strategy and
multiplied by four compared to that of our proposed
Fuzzy Multi-objective Optimization for Ride-sharing Autonomous Mobility-on-Demand Systems
291
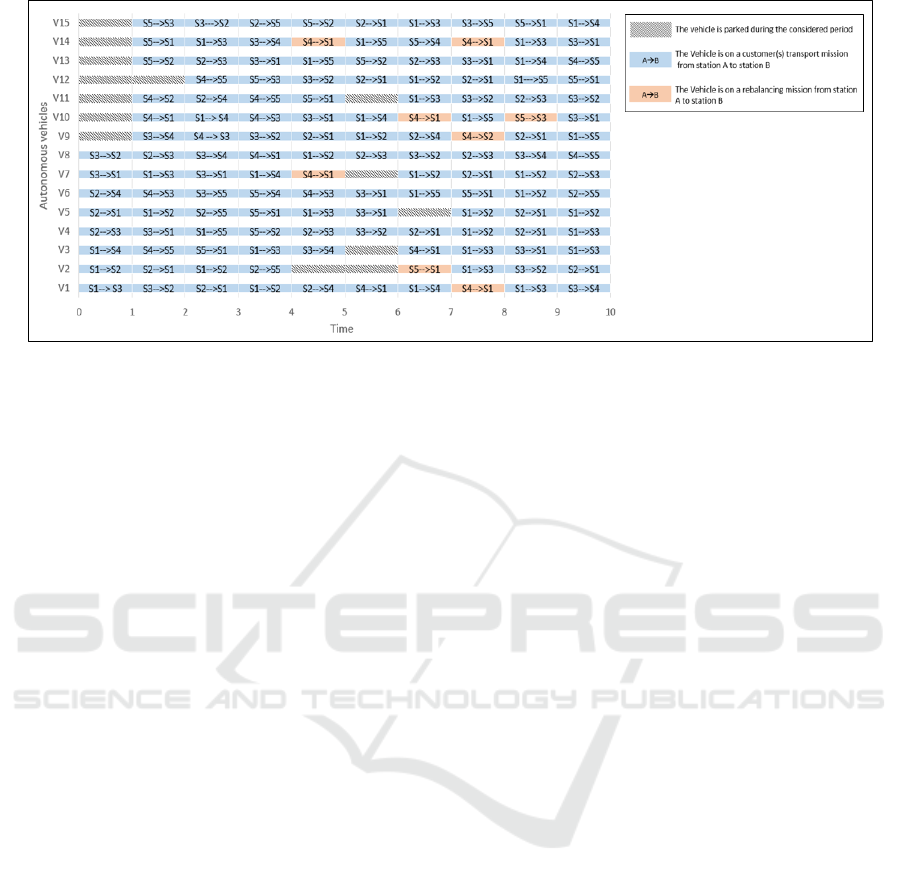
Figure 4: Vehicle scheduling as a function of time.
approach (i.e. "D-R-RAMoD-Fuzzy" strategy). This
is not surprising, given that the single capacity
strategy is here compared to the ride-sharing policies
where the maximum capacity of vehicles is extended
to eight.
We can also see the marked difference in
performance between the "D-RAMoD-Fuzzy"
strategy and the "D-R-RAMoD-Perfect" strategy
from Figure 3 showing the number of lost customer
requests at any given period. Notably, the "D-
RAMoD-Fuzzy" strategy has significantly more lost
customer requests at any given time period, with
mean lost requests multiplied by four compared to the
optimal strategy and multiplied by three compared to
that of our proposed approach. This is also not
unexpected, since we can gain much of performance
by incorporating rebalancing trips ensuring a balance
between the number of vehicles available in each
station and customer requests.
A significant performance gain is attributed by
incorporating rebalancing trips and the fact that
several customers can share the same vehicle. Indeed,
we can notice that out of 10 experiments, the
proposed approach generates an optimal solution for
six experiments. It also offers solutions that are very
close to the optimal solution for the other periods with
a deviation of 35%. This highlights the robustness of
the proposed approach for operating the fleet and
satisfying customers, even when forecasts of
customer requests are uncertain.
9 CONCLUSION
Despite the significant advances in AMoD and
RAMoD systems, the existing studies still display a
lack of approaches dealing with the uncertainty
affecting travel demand forecasts. The rare studies
dealing with this drawback mainly suggest the use of
stochastic programming that is usually based on the
statistical data. However, in practice, historical data
may not be reliable or even unavailable. Accordingly,
these traditional programming models may not be the
best tool to deal with uncertainty.
Thus, this work provides a new point of view on
the problem of dispatching and rebalancing in the
RAMoD systems by using a new alternative approach
for managing uncertainty. Specifically, we first
formulated the problem as a multi-objective
possibilistic linear programming model in which
customer requests are evaluated in an imprecise way
using triangular possibility distribution. The proposed
fuzzy formulation is then transformed to an
equivalent crisp multi-objective linear programming
model by combining appropriate strategies. In the
third phase, the well known goal programming
approach is being exploited to obtain a compromise
solution. Through experiments, we show that the
proposed approach has the capability to deal with
realistic situations in an uncertain environment and
provides an efficient decision tool for the dispatching
and rebalancing decisions in RAMoD systems.
This work leaves opens for considerable
extensions for future research.
First, the proposed approach can be extended in
situations when RAMoD systems are faced with
fluctuations of several parameters. This research area
will require introducing forecasting models that are
able to model not only the uncertain customer
requests but also other critical parameters such as
vehicle availability, costs, the states of charge of
vehicles, etc.
ICSOFT 2020 - 15th International Conference on Software Technologies
292

Second, we plan to explore the integration of
routing policies within a capacitated road network.
This, in turn, can be subject to important uncertainties
due to several external factors such as traffic
congestion. Thus, the goal of this research axis is to
devise a robust dispatching-rebalancing and routing
policy that leverages forecasting parameters while
considering the uncertainty that can arise in the road
network.
Finally, further research can study the couplings
that could occur between public transit and the
AMoD systems.
ACKNOWLEDGMENT
This work is financed by national funds FUI 23 under
the French TORNADO project focused on the
interactions between autonomous vehicles and
infrastructures for mobility services in low-density
areas. Further details of the project are available at
https://www.tornado-mobility.com/.
REFERENCES
Ali, M.A. and Lun, A.K., 2019. A cascading fuzzy logic
with image processing algorithm–based defect
detection for automatic visual inspection of industrial
cylindrical object’s surface. The International Journal
of Advanced Manufacturing Technology, 102(1-4),
pp.81-94.
Alonso-Mora, J., Wallar, A. and Rus, D., 2017, September.
Predictive routing for autonomous mobility-on-demand
systems with ride-sharing. In 2017 IEEE/RSJ
International Conference on Intelligent Robots and
Systems (IROS) (pp. 3583-3590). IEEE.
Amin, G.R., Al-Muharrami, S. and Toloo, M., 2019. A
combined goal programming and inverse DEA method
for target setting in mergers. Expert Systems with
Applications, 115, pp.412-417.
Bagga, P., Joshi, A. and Hans, R., 2019. QoS based Web
Service Selection and Multi-Criteria Decision Making
Methods. International Journal of Interactive
Multimedia & Artificial Intelligence, 5(4).
Belakaria, S., Ammous, M., Sorour, S. and Abdel-Rahim,
A., 2019. Fog-based multi-class dispatching and
charging for autonomous electric mobility on-
demand. IEEE Transactions on Intelligent
Transportation Systems.
Charnes, A. and Cooper, W.W., 1957. Management models
and industrial applications of linear
programming. Management Science, 4(1), pp.38-91.
Colapinto, C., Jayaraman, R. and La Torre, D., 2020. Goal
programming models for managerial strategic decision
making. In Applied Mathematical Analysis: Theory,
Methods, and Applications (pp. 487-507). Springer,
Cham.
Dubois, D. and Prade, H., 1988. Possibility Theory, New
York, London.
Hörl, S., Ruch, C., Becker, F., Frazzoli, E. and Axhausen,
K.W., 2018. Fleet control algorithms for automated
mobility: A simulation assessment for Zurich. In 2018
TRB Annual Meeting Online (pp. 18-02171).
Transportation Research Board.
Hsu, H.M. and Wang, W.P., 2001. Possibilistic
programming in production planning of assemble-to-
order environments. Fuzzy sets and Systems, 119(1),
pp.59-70.
Iglesias, R., Rossi, F., Wang, K., Hallac, D., Leskovec, J.
and Pavone, M., 2018, May. Data-driven model
predictive control of autonomous mobility-on-demand
systems. In 2018 IEEE International Conference on
Robotics and Automation (ICRA) (pp. 1-7). IEEE.
Iglesias, R., Rossi, F., Zhang, R. and Pavone, M., 2019. A
BCMP network approach to modeling and controlling
autonomous mobility-on-demand systems. The
International Journal of Robotics Research, 38(2-3),
pp.357-374.
Javanshour, F., Dia, H. and Duncan, G., 2019. Exploring
the performance of autonomous mobility on-demand
systems under demand uncertainty. Transportmetrica
A: Transport Science, 15(2), pp.698-721.
Khemiri, R., Elbedoui-Maktouf, K., Grabot, B. and Zouari,
B., 2017. A fuzzy multi-criteria decision-making
approach for managing performance and risk in
integrated procurement–production planning. Interna-
tional Journal of Production Research, 55(18),
pp.5305-5329.
Khemiri, R., Elbedoui-Maktouf, K., Grabot, B. and Zouari,
B., 2017a, September. Integrating fuzzy TOPSIS and
goal programming for multiple objective integrated
procurement-production planning. In 2017 22nd IEEE
International Conference on Emerging Technologies
and Factory Automation (ETFA) (pp. 1-8). IEEE.
Lai, Y.J. and Hwang, C.L., 1992. A new approach to some
possibilistic linear programming problems. Fuzzy sets
and systems, 49(2), pp.121-133.
Lee, J.W. and Kim, S.H., 2000. Using analytic network
process and goal programming for interdependent
information system project selection. Computers &
Operations Research, 27(4), pp.367-382.
Levin, M.W., Kockelman, K.M., Boyles, S.D. and Li, T.,
2017. A general framework for modeling shared
autonomous vehicles with dynamic network-loading
and dynamic ride-sharing application. Computers,
Environment and Urban Systems, 64, pp.373-383.
Liang, T.F., 2006. Distribution planning decisions using
interactive fuzzy multi-objective linear programming.
Fuzzy Sets and Systems, 157(10), pp.1303-1316.
Lima-Junior, F.R. and Carpinetti, L.C.R., 2020. An
adaptive network-based fuzzy inference system to
supply chain performance evaluation based on SCOR®
metrics. Computers & Industrial Engineering, 139,
p.106191.
Fuzzy Multi-objective Optimization for Ride-sharing Autonomous Mobility-on-Demand Systems
293

Luhandjula, M.K., 1989. Fuzzy optimization: an
appraisal. Fuzzy sets and systems, 30(3), pp.257-282.
Maciejewski, M., Bischoff, J., Hörl, S. and Nagel, K., 2017,
June. Towards a testbed for dynamic vehicle routing
algorithms. In International Conference on Practical
Applications of Agents and Multi-Agent Systems (pp.
69-79). Springer, Cham.
Moran, P.A.P., 1952, January. A characteristic property of
the Poisson distribution. In Mathematical Proceedings
of the Cambridge Philosophical Society (Vol. 48, No.
1, pp. 206-207). Cambridge University Press.
Nagi, R. and Tripathy, S.S., 2020. Infected Area
Segmentation and Severity Estimation of Grapevine
Using Fuzzy Logic. In Advances in Computational
Intelligence (pp. 57-67). Springer, Singapore.
Nemati, Y. and Alavidoost, M.H., 2019. A fuzzy bi-
objective MILP approach to integrate sales, production,
distribution and procurement planning in a FMCG
supply chain. Soft computing, 23(13), pp.4871-4890.
Pati, R.K., Vrat, P. and Kumar, P., 2008. A goal
programming model for paper recycling
system. Omega, 36(3), pp.405-417.
Rhimi, F., Yahia, S.B. and Ahmed, S.B., 2016. Balancing
between Local and Global Optimization of Web
Services Composition by a Fuzzy Transactional-aware
Approach. In ICSOFT-PT (pp. 75-82).
Sakawa, M. and Yano, H., 1989. An interactive fuzzy
satisficing method for multiobjective nonlinear
programming problems with fuzzy parameters. Fuzzy
sets and systems, 30(3), pp.221-238.
Sarno, R., Sinaga, F. and Sungkono, K.R., 2020. Anomaly
detection in business processes using process mining
and fuzzy association rule learning. Journal of Big
Data, 7(1), pp.1-19.
Serfozo, R., 2012. Introduction to stochastic networks
(Vol. 44). Springer Science & Business Media.
Tanaka, H. and Asai, K., 1984. Fuzzy linear programming
problems with fuzzy numbers. Fuzzy sets and
systems, 13(1), pp.1-10.
Tanaka, H., Ichihashi, H. and Asai, K. 1984. A formulation
of linear programming problems based on comparison
of fuzzy numbers. Control Cybernet, 13, pp. 185–194.
Torabi, S.A. and Hassini, E., 2009. Multi-site production
planning integrating procurement and distribution plans
in multi-echelon supply chains: an interactive fuzzy
goal programming approach. International Journal of
Production Research, 47(19), pp.5475-5499.
Tornado Mobility FUI Project. [online]. [Accessed
12/02/2020]. Available from: https://www.tornado-
mobility.com/
Tsao, M., Iglesias, R. and Pavone, M., 2018, November.
Stochastic model predictive control for autonomous
mobility on demand. In 2018 21st International
Conference on Intelligent Transportation Systems
(ITSC) (pp. 3941-3948). IEEE.
Tsao, M., Milojevic, D., Ruch, C., Salazar, M., Frazzoli, E.
and Pavone, M., 2019, May. Model predictive control
of ride-sharing autonomous mobility-on-demand
systems. In 2019 International Conference on Robotics
and Automation (ICRA) (pp. 6665-6671). IEEE.
Wang, R.C. and Liang, T.F., 2005. Applying possibilistic
linear programming to aggregate production
planning. International journal of production
economics, 98(3), pp.328-341.
Yahya, F., Boukadi, K., Ben-Abdallah, H. and Maamar, Z.,
2017. A Fuzzy Logic-based Approach for Assessing the
Quality of Business Process Models. In ICSOFT (pp.
61-72).
Zadeh, L.A., 1965. Fuzzy sets. Information and
control, 8(3), pp.338-353.
Zadeh, L.A., 1978. Fuzzy sets as a basis for a theory of
possibility. Fuzzy sets and systems, 1(1), pp.3-28.
Zhang, R. and Pavone, M., 2015, July. A queueing network
approach to the analysis and control of mobility-on-
demand systems. In 2015 American Control
Conference (ACC) (pp. 4702-4709). IEEE.
Zhang, R. and Pavone, M., 2016. Control of robotic
mobility-on-demand systems: a queueing-theoretical
perspective. The International Journal of Robotics
Research, 35(1-3), pp.186-203.
Zhang, R., Rossi, F. and Pavone, M., 2016, May. Model
predictive control of autonomous mobility-on-demand
systems. In 2016 IEEE International Conference on
Robotics and Automation (ICRA) (pp. 1382-1389).
IEEE.
ICSOFT 2020 - 15th International Conference on Software Technologies
294
