
Retinal Vessel Segmentation by Inception-like Convolutional Neural
Networks
Hadi Niknam Shirvan
a
, Reza Askari Moghadam
b
and Kurosh Madani
2
1
Faculty of New Sciences and Technologies, University of Tehran, Tehran, Iran
2
LISSI Lab, Senart-FB Institute of Technology, University Paris Est-Creteil (UPEC), Lieusaint, France
Keywords: Deep Learning, Inception-like CNN, Retinal Image Processing, Medical Application.
Abstract: Deep learning architectures have been proposed in some neural networks like convolutional neural networks
(CNN), recurrent neural networks and deep belief neural networks. Among them, CNNs have been applied in
image processing tasks frequently. An important section in intelligent image processing is medical image
processing which provides intelligent tools and software for medical applications. Analysis of blood vessels
in retinal images would help the physicians to detect some retina diseases like glaucoma or even diabetes. In
this paper a new neural network structure is proposed which can process the retinal images and detect vessels
apart from retinal background. This neural network consists of convolutional layers, concatenate layers and
transpose convolutional layers. The results for DRIVE dataset show acceptable performance regarding to
accuracy, recall and F-measure criteria.
1 INTRODUCTION
Nowadays, modern methods based on deep learning
methods have been widely used in various sciences
and have solved a lot of challenges and problems.
One of the essential applications of deep neural
networks is in medical image processing in order to
diagnose various diseases. Analysis of blood vessels
in retinal images is done to diagnose eye diseases.
Before the advent of computer vision and deep
learning methods, this operation was done manually,
which was time-consuming (Soomro, 2019).
However, in recent years several methods have been
developed to detect blood vessels in retinal images,
which have high speed and high accuracy benefits,
and these methods can become helpful in this field. In
the earlier ways, some methods were based on image
processing techniques with using different filters and
math calculations on images (Staal, 2004), and some
other methods were based on simple neural networks
(Zhang, 2015). Other methods e.g. fuzzy c-means
(Tolias and Panas,1998; Kande, 2010) and decision
tree (Fraz, 2012) were proposed for segmentation
blood vessels in retinal images, but the presented
methods were not very accurate and were not able to
detect all the blood vessels in the image.
a
https://orcid.org/0000-0003-4745-6956
b
https://orcid.org/0000-0001-8394-7256
With advent new processing hardware and
providing large volumes of datasets, deep learning
networks have made significant progress in medical
image processing and disease detection and replaced
traditional methods (LeCun, 2015). In deep learning
networks, a large number of layers and neurons
perform learning tasks, and by using large amounts of
training data, the trained model will be highly
accurate. AlexNet (Krizhevsky, 2012) was one of the
earlier proposed networks in the field of deep neural
networks. In the Architecture of this network, there
are some layers called convolutional layers, and the
operation of extracting image features are done by
these layers. In the convolutional neural networks, the
lower layers extract low-level features of the image
such as horizontal or vertical line detection, and upper
layers of the network extract the high-level features
of the image. In the following years, new structures
of deep learning networks were introduced, e.g.,
VGGNet (Simonyan & Zisserman, 2014),
GoogLeNet (Szegedy, 2015) and ResNet (He, 2016),
each with its architecture and features. These
networks are very accurate in image processing and
object recognition applications. In the Google
Network, some individual layers are used, which are
called the Inspection layer, in which the convolve
Shirvan, H., Moghadam, R. and Madani, K.
Retinal Vessel Segmentation by Inception-like Convolutional Neural Networks.
DOI: 10.5220/0009638100530058
In Proceedings of the 1st International Conference on Deep Learning Theory and Applications (DeLTA 2020), pages 53-58
ISBN: 978-989-758-441-1
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
53
operation is done in different sizes and parallel, and
the results of operations concatenate to each other at
the end of Inspection layer. This approach let the
network to learn best weights and automatically select
the more useful features. But this operation needs
more computational cost for training this layer and
because of this, At the beginning of this network,
several pooling layers reduce the size of the input
image, and as a result, the weight of the network
decreases, which makes the network very fast to train.
With the advances in deep neural networks, these
networks can be used for various applications such as
object detection, face recognition, cancer detection.
The techniques of learning in neural networks are
divided into two categories of supervised learning and
unsupervised learning. Supervised learning uses input
data with their ground truth to makes the behavior of
the network more similar to the target label. The
method of supervised learning is more accurate for
image processing, but preparing data with precise and
appropriate ground truths is one of the main
challenges of this method. In retinal images, the
detection of blood vessels is done by segmentation of
input images pixels. In the ground truth image of
training data, the blood vessels and the other parts are
separated. After the learning process, the trained
model would be able to separate the blood vessel and
other parts in each input picture. Many networks have
been proposed for segmentation operations on retinal
images that are highly accurate in the detection of
blood vessels in retinal images.
One of the earlier proposed architecture for image
segmentation applications is Fully Connected Network
(FCN) (Long, 2015). All layers that are used in the
architecture of this network are convolutional, and there
is no fully connected layer. This architecture makes the
network independent of the input image size.
U-Net (Ronneberger, 2015) is another network
for segmentation operations in medical images. In
this network, encoder and decoder operations are
done on the images. In the encoder part, the features
of the image are extracted, and the size of the input
image is reduced. After the encoder layers, the
decoder layers are replaced, which reconstructs the
image by concatenating the lower layers.
Some new methods (Guo, 2019) are proposed
which their structures are inspired by other famous
networks like VGG-Net, Res-Net and U-Net.
Although there are some changes in the architectures
of layers in these networks. Deep Retinal Images
Understanding (DRIU) is name of a structure that is
proposed for segmentation both blood vessels and
optical disc in retinal images. The structure of DRIU
is based on VGG-Net but more in-depth (Maninis,
2016). In some frameworks (Soomro, 2019), more
in-depth examples of encoder-decoder architectures
are used for the segmentation of retinal images. In
these architectures, the polling layers are replaced by
stride in the convolutional layers.
In this research a new approach for segmentation
of blood vessels in retinal images is used which called
Inception-like CNN. This structure first was proposed
for saliency detection applications in our previous
research. In the architecture of this network there are
some layers which are based on inception layers in
GoogLe-Net (Misaghi, 2018; Misaghi, 2018).
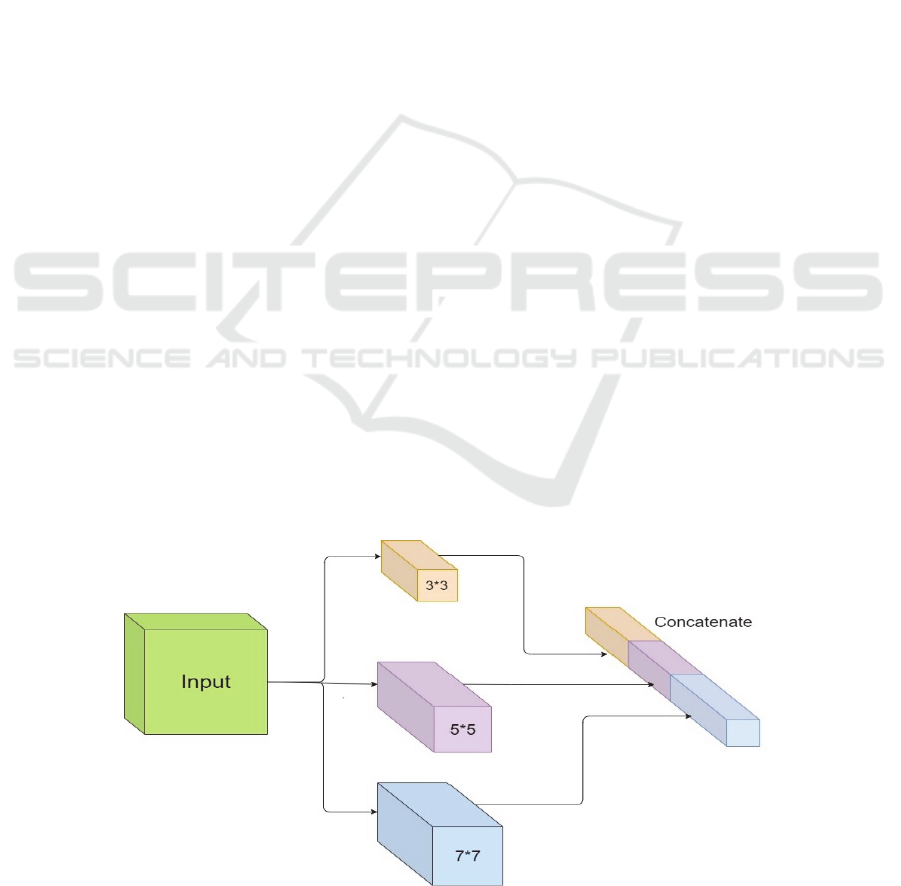
2 THE PROPOSED METHOD
In the structure of our network, there are five
Inception-like layers. These layers are based on the
idea of the inception layer but partly different. In the
Inception-like layer, three convolutional layers are
used separately, as shown in Figure 1. The main idea
Figure 1: Inception-like layer.
DeLTA 2020 - 1st International Conference on Deep Learning Theory and Applications
54

Figure 2: Architecture of proposed network.
in this approach is to extract more features by using
different size convolution on input images. It is
desired to know some relations between regions of
the retinal image and their surroundings to learn
whether that region is a blood vessel or not. The size
of three convolutional layers is 3*3, 5*5, and 7*7.
And the RELU activation function is used at the end
of each convolution layer, which is the most
commonly used activation function in the CNNs.
RELU function compares the input value with zero
and returns the maximum value between them. After
the activation function, the results of three
convolution layers are concatenated in depth. With
the advantage that different size convolve operation
is done, more data is extracted in each input image,
and this operation improves the performance of the
network.
As shown in Figure 2, in the architecture of this
network, there are other layers except the Inception-
like layer. The input image is passed, and its size is
reduced by three down sampling layers. Same as the
structure of other convolutional neural networks with
passing each layer, the depth of layers increases. In
these layers, we actually try to teach the neural
network to focus on the fewer activation points than
all of it, because to reduce resolution of the feature
map which helps to reduce time and memory while
training. After extracting data and features of the
image in Inception-like layers, three transpose
convolution layers up samples the feature map to
rescaling it to the desired size. Transpose convolution
layers operate despite convolution layers, which
means in 3*3 kernel, they map from 1 input pixel to
3x3 pixels instead of mapping from 3x3 input pixels
to 1 output.
p sampling and down sampling layers use the
RELU activation function, the same as convolutional
layers in the Inception-like layer. In the last layer of
the network, the sigmoid activation function is used
to bounds the output map to a grayscale image. In the
output map, the pixels are divided into two regions
that show there are blood vessels or not.
3 TRAINING PROCEDURE
In the application of blood vessel segmentation in
retinal images, there are several datasets. The mostly
used datasets are DRIVE (Staal, 2004) and Stare
(Hoover, 2000). We use DRIVE dataset for training
our network. It consists of 40 colour images and is
divided into training and test, each containing 20
retinal images. For each image, there are a manual
segmentation ground truth and a binary mask. Figure
3 shows an example of DRIVE dataset with its ground
truth and binary mask. In the training procedure, the
whole 20 training images divided into 10000 sub-
images, and these sub-images stick to each other
randomly, to build the input map. This operation is
done because of shortage dataset and the trained
model by this method would be more powerful in
segmentation operation. Using more sub-images for
training takes more time for training process, thus
choosing an efficient number for sub-images is so
important. Ninety percent of training images are used
for train and other 10 percent for the validation set.
Figure 3: An example of DRIVE dataset. Original image-
Binary mask- Ground truth.
Retinal Vessel Segmentation by Inception-like Convolutional Neural Networks
55
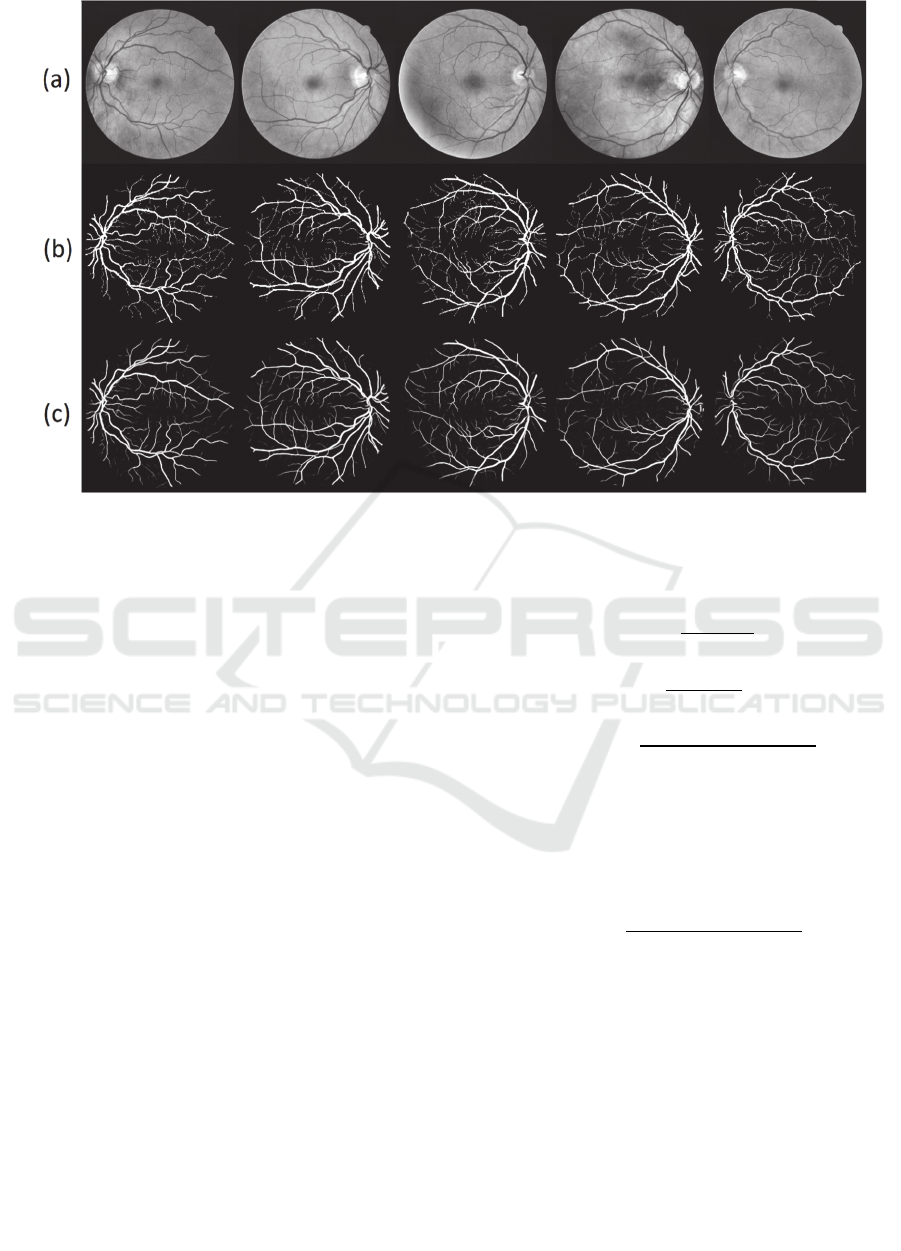
Figure 4: (a) Gray scale of original image (b) Ground truth (c) Output of network.
The training process is done with the help of the GPU
service of the Google Colab framework. An Adam
optimizer with exponential decay is used to update
weights. Adam optimizer is used with a learning rate
of 0.01. Adam optimizer has the advantage of high
performance and high speed in optimization deep
neural networks.
4 RESULTS AND EVALUATION
In this paper, a network for the segmentation of blood
vessels in retinal images has been proposed. After
training the model by 20 training images, the prepared
model is tested by 20 test images of DRIVE dataset.
In the output map, all pixels are divided into a vessel
or non-vessel pixel. In Figure 4 a few test examples
of retinal images with the corresponding ground truth
and the output of the network are shown.
Evaluation parameters can be measured by
comparing between output map and ground truth
picture. For a vessel pixel in the output map, it would
be considered as true positive (TP) and false positive
(FP) if the corresponding point is defined as vessel or
non-vessel, respectively. Also, true negative (TN) and
false negative (FN) are defined for non-vessel pixel
in output map, same as TP and FP.
Precision and recall parameters are defined in (1)
and (2). These parameters can’t show the quality of
the result, alone, and they should present with each
other. So another parameter is defined as F-measure
that contains both precision and recall parameters.
𝑝𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛 ∶
𝑇𝑃
𝑇𝑃 𝐹𝑃
(1)
𝑟𝑒𝑐𝑎𝑙𝑙
𝑇𝑃
𝑇𝑃 𝐹𝑁
(2)
𝐹𝑚𝑒𝑎𝑠𝑢𝑟𝑒
2 𝑝𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛 𝑟𝑒𝑐𝑎𝑙𝑙
𝑝𝑟𝑒𝑐𝑖𝑠𝑖𝑜𝑛 𝑟𝑒𝑐𝑎𝑙𝑙
(3)
The accuracy of the results is another parameter that
is being used for evaluating the quality of the result
of deep neural networks. It defines as the ratio of all
truly predicted pixels to whole pixels of the input
image.
accurac
y
𝑇𝑃 𝑇𝑁
𝑇𝑃 𝐹𝑃 𝑇𝑁 𝐹𝑁
(4)
The Receiver Operating Characteristic (ROC) curve
and the Area Under ROC (AUC) are two important
parameters for comparing different methods of
segmentation in research works. ROC is a probability
curve, and AUC represents the power of the trained
model in separating the pixels of the input image into
a vessel or non-vessel. AUC ranges in value from 0 to
1. The results with closer AUC to one has better
quality in segmentation problems. These parameters
are calculated almost in all researches in this subject
and by comparing the parameters with other state of
arts the performance of method could be specified.
DeLTA 2020 - 1st International Conference on Deep Learning Theory and Applications
56
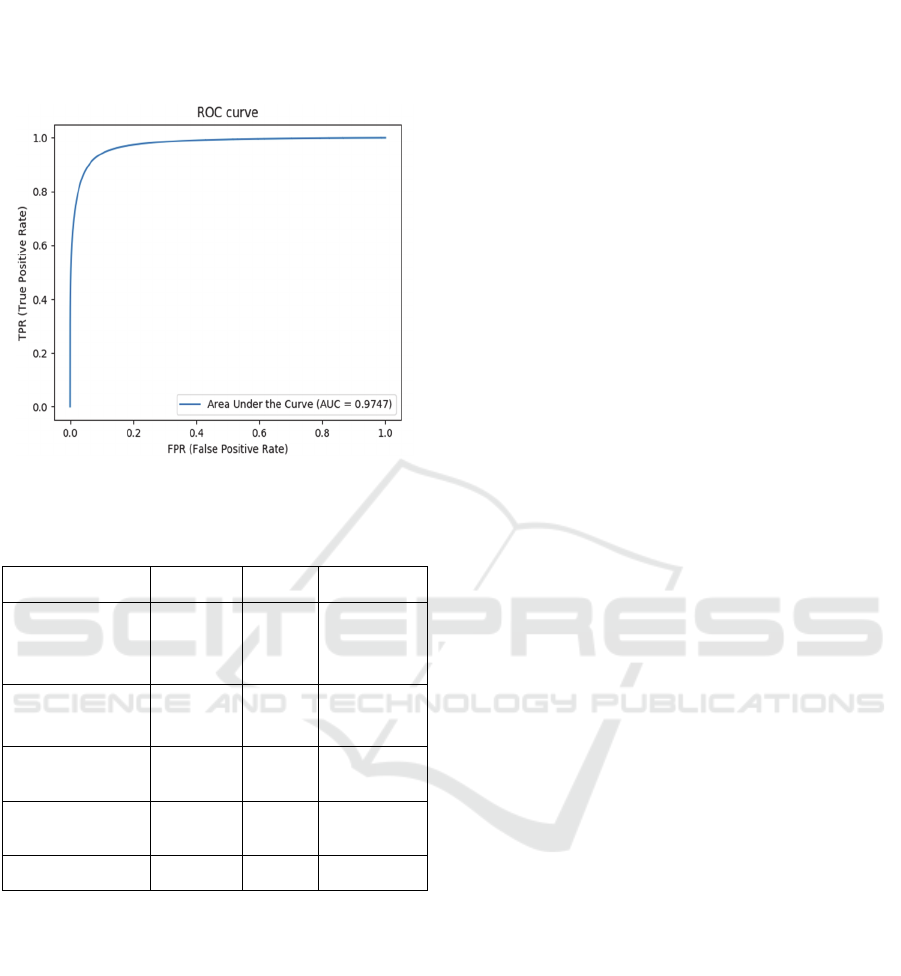
In Figure 5, the ROC curve of our results is shown,
and the AUC is measured. And in Table 1, the F-
measure, accuracy, and AUC are compared with other
proposed methods.
Figure 5: ROC curve for our results.
Table 1: Performance comparison with other proposed
methods on the DRIVE dataset.
methods accuracy AUC F_measure
Active Contour
Model (Zhao,
2015)
0.9540 0.8620 0.7820
DRIU (Maninis,
2016)
0.9552 0.9793 0.8220
Three-stage FCN
(Yan, 2018)
0.9538 0.9750
-
Modified U-net
(Zhang, 2018)
0.9504 0.9799
-
Our method 0.954 0.979 0.818
The results of Figure 4, 5 and Table 1 show that
the proposed method is powerful in segmentation task
and it could be useful for diagnosing eye diseases. The
accuracy of this network is acceptable, due to the
result of feature extraction by several convolve
operation in Inception-like layers.
5 CONCLUSIONS
The applications of artificial intelligence methods and
machine learning techniques are growing drastically
in many fields like medical subjects. One major
intelligent tool for medical image processing is deep
learning neural networks. In this paper a
convolutional neural network is proposed which is
able to process retina images fast and detects vessels
apart from retina background. It can help the
physicians to find and detect some retina diseases like
glaucoma or even detect some other diseases like
diabetes. The proposed CNN consists of three major
parts including convolutional layers, concatenate
layers and transpose convolutional layers. The
features are extracted by several convolve operation
in Inception-like layers. In proposed CNN accuracy is
about 0.954, AUC is 0.979and F-measure value is
0.818.
ACKNOWLEDGEMENT
The authors would thank Mr. Hooman Misaghi for
his helps and supports.
REFERENCES
Soomro, T. A., Afifi, A. J., Zheng, L., Soomro, S., Gao, J.,
Hellwich, O., & Paul, 2019, Deep learning models for
retinal blood vessels segmentation: A review. IEEE
Access, Vol.7, pp.71696-71717.
Staal, J., et al., 2004, "Ridge-based vessel segmentation in
color images of the retina." IEEE transactions on
medical imaging, Vol. 23(4), pp. 501-509.
Zhang, J., et al., 2015, Blood vessel segmentation of retinal
images based on neural network. International
Conference on Image and Graphics, Springer, pp.11-
17.
Tolias, Y. A. and S. M. Panas, 1998, "A fuzzy vessel
tracking algorithm for retinal images based on fuzzy
clustering." IEEE transactions on medical imaging,
Vol. 17(2) , pp. 263-273.
Kande, G. B., Subbaiah, P. V., & Savithri, T. S., 2010,
Unsupervised fuzzy-based vessel segmentation in
pathological digital fundus images. Journal of medical
systems, Vol. 34(5), pp. 849-858.
Fraz, M. M., et al., 2012, "An ensemble classification-based
approach applied to retinal blood vessel segmentation."
IEEE Transactions on Biomedical Engineering, Vol.
59(9), pp. 2538-2548.
LeCun, Y., et al., 2015, "Deep learning." Nature, Vol.
521(7553), pp. 436-444.
Krizhevsky, A., et al., 2012, Imagenet classification with
deep convolutional neural networks. Advances in
neural information processing systems, pp. 1097-1105.
Simonyan, K. and A. Zisserman, 2014, "Very deep
convolutional networks for large-scale image
recognition." arXiv preprint arXiv, pp. 1409-1556.
Szegedy, C., et al., 2015, Going deeper with convolutions.
Proceedings of the IEEE conference on computer vision
and pattern recognition, pp. 1-9.
Retinal Vessel Segmentation by Inception-like Convolutional Neural Networks
57

He, K., et al., 2016, Deep residual learning for image
recognition. Proceedings of the IEEE conference on
computer vision and pattern recognition, pp. 770-778.
Long, J., et al., 2015, Fully convolutional networks for
semantic segmentation. Proceedings of the IEEE
conference on computer vision and pattern recognition,
pp. 3431-3440.
Ronneberger, O., et al., 2015, U-net: Convolutional
networks for biomedical image segmentation.
International Conference on Medical image computing
and computer-assisted intervention, Springer, pp. 234-
241.
Guo, S., et al., 2019, "BTS-DSN: Deeply supervised neural
network with short connections for retinal vessel
segmentation." International journal of medical
informatics, Vol. 126, pp. 105-113.
Maninis, K.-K., et al., 2016, Deep retinal image
understanding. International conference on medical
image computing and computer-assisted intervention,
Springer, pp. 140-148.
Soomro, T. A., et al., 2019, "Strided fully convolutional
neural network for boosting the sensitivity of retinal
blood vessels segmentation." Expert Systems with
Applications, Vol. 134, pp. 36-52.
Misaghi, H., et al., 2018, Image Saliency Detection By
Residual And Inception-like CNNs. 2018 6th RSI
International Conference on Robotics and
Mechatronics (IcRoM), IEEE, pp. 94-99.
Misaghi, H., et al., 2018, Convolutional neural network for
saliency detection in images. 6th Iranian Joint
Congress on Fuzzy and Intelligent Systems (CFIS),
IEEE, pp. 17-19.
Hoover, A., et al., 2000, "Locating blood vessels in retinal
images by piecewise threshold probing of a matched
filter response." IEEE transactions on medical imaging,
Vol. 19(3), pp. 203-210.
Zhao, Y., et al., 2015, "Automated vessel segmentation
using infinite perimeter active contour model with
hybrid region information with application to retinal
images." IEEE transactions on medical imaging, Vol.
34(9), pp. 1797-1807.
Maninis, K.-K., et al., 2016, Deep retinal image
understanding. International conference on medical
image computing and computer-assisted intervention,
Springer, 140-148.
Yan, Z., et al., 2018, "A three-stage deep learning model for
accurate retinal vessel segmentation." IEEE journal of
Biomedical and Health Informatics Vol. 23(4), pp.
1427-1436.
Zhang, Y. and A. C. Chung, 2018, Deep supervision with
additional labels for retinal vessel segmentation task.
International conference on medical image computing
and computer-assisted intervention, Springer, pp. 83-
91.
DeLTA 2020 - 1st International Conference on Deep Learning Theory and Applications
58
