
What Cooperation Costs: Quality of Communication and Cooperation
Costs for Cooperative Vehicular Maneuvering in Large-scale Scenarios
Daniel Bischoff
1,3
, Florian Schiegg
2
, Tobias Meuser
3
, Dieter Schuller
1
, Nils Dycke
3
and Ralf Steinmetz
3
1
Active Safety Advanced Technology, Opel Automobile GmbH, R
¨
usselsheim, Germany
2
Corporate Research, Robert Bosch GmbH, Hildesheim, Germany
3
Multimedia Communications Lab (KOM), TU Darmstadt, Germany
{tobias.meuser, ralf.steinmetz}@kom.tu-darmstadt.de
Keywords:
V2X, Cooperative Vehicular Maneuvering, MCM, Intersection, Quality of Communication, Cooperation
Cost.
Abstract:
With the rise of vehicles on the road, Cooperative Vehicular Maneuvering (CVM) is a crucial prospect to in-
crease the efficiency of future vehicular traffic. Recent work proposes promising approaches for CVM using
Vehicle-to-Everything (V2X) communication to increase traffic efficiency but evaluates its performance with
only a few vehicles involved and without considering realistic radio propagation channel models. CVM relies
on high quality of communication to coordinate cooperative maneuvers and increases traffic efficiency primar-
ily under heavy vehicular traffic load, which also challenges the V2X quality of communication in terms of
channel load and reliability. In this paper, we propose a novel computational efficient CVM planning algo-
rithm specially designed for large-scale scenarios considering a realistic radio propagation channel model and
analyze the quality of communication and cooperation cost of CVM using ad hoc communication technology.
For our urban intersection scenario, we show that imperfect communication limits the earliest start of coop-
eration to 150 m and increases the average Age of Information (AoI) of CVM messages up to 400ms, which
motivates the need for more advanced V2X dissemination strategies.
1 INTRODUCTION
These days, vehicle efficiency and safety are consid-
ered increasingly important (Llatser et al., 2019). In
the past years, the field of research primarily targeted
traffic safety by assisting the human driver with Ad-
vanced Driver Assistance Systems (ADASs).
Recently, research activities also focus on traffic
efficiency. A promising field of research to address
traffic safety and efficiency for human drivers as well
as for autonomous vehicles is V2X communication.
Sharing information among vehicles increases the en-
vironmental perception beyond the local sensor per-
ception of vehicles (Schiegg et al., 2019) and further
enables CVM (D
¨
uring et al., 2014).
In order to illustrate the potential of CVM using
V2X communication, we consider an urban intersec-
tion. A Tagged Vehicle (TV), i. e., a vehicle equipped
with a CVM application, is about to perform a left-
turn. If there is no traffic light control for this partic-
ular maneuver, the TV has to wait for an open gap in
the oncoming traffic flow. Waiting for an open gap
can lead to a traffic jam because all vehicles behind
are forced to wait as well (Fu and Hellinga, 2000).
Already today, human drivers occasionally coop-
erate by giving priority to others to improve the over-
all traffic efficiency. Such a vehicle that opens a gap
and emphasizes its willingness to cooperate with oth-
ers is referred to as Cooperation Vehicle (CV) for the
remainder of this paper. Unfortunately, CVM requires
coordination, which is limited for human drivers as
well as for autonomous vehicles (Llatser et al., 2019).
This motivates the need for V2X communica-
tion to reliably share information about the vehicles’
static and dynamic information over vast distances,
even under non-line-of-sight conditions (Boban et al.,
2018). Thus, V2X communication allows for novel
coordination capabilities, and the communication
range grants more time to the cooperation process
compared to other mechanisms (e. g., hand gestures).
V2X communication enables CVM by sharing the
vehicles’ planned maneuver via a so-called Maneu-
394
Bischoff, D., Schiegg, F., Meuser, T., Schuller, D., Dycke, N. and Steinmetz, R.
What Cooperation Costs: Quality of Communication and Cooperation Costs for Cooperative Vehicular Maneuvering in Large-scale Scenarios.
DOI: 10.5220/0009592403940405
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 394-405
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

ver Coordination Message (MCM) (Lehmann et al.,
2018), e. g., left-turn for the TV. Hence, an oncom-
ing vehicle receives the planned maneuver, detects the
potential conflict with its planned path, and may co-
operate by adapting its planned path, e. g., by slowing
down. We assume that the TV already optimized its
planned path through the extended environmental per-
ception gained by V2X communication, i. e., the TV
cannot adapt its planned path to increase traffic effi-
ciency and requires cooperation from other vehicles.
Even if the environment is taken into considera-
tion to plan the cooperative maneuver, we cannot eas-
ily predict the traffic flow as it is highly dynamic (Shi
et al., 2008). Therefore, it is inevitable to contin-
uously adapt the currently planned maneuver to the
current traffic state and share it with others.
V2X communication relies on radio propagation
to share information among vehicles. A radio prop-
agation channel describes the attenuation of wireless
information due to path loss, shadowing, and fading.
Once the attenuation of a signal is too high, the re-
ceiver cannot decode the packet. Path loss is the dom-
inant attenuation factor in radio propagation chan-
nels and foremost limits the communication distance.
In challenging environments, such as urban intersec-
tions, also channel congestion, slow-fading (shadow-
ing), and fast-fading (multi-path propagation) cause
the quality of communication to fluctuate (Mecklen-
brauker et al., 2011) and reduces the number of re-
ceived messages for cooperation partners. Therefore,
it is inevitable to consider realistic radio propagation
effects for CVM simulations.
Considering our example above, let us assume the
cooperation immediately starts with the first received
MCM. Due to fading (constructive interference), the
first reception can be way ahead of the intersection.
Nevertheless, at vast distances, the Packet Error Rate
(PER) is very high, such that subsequent MCMs of
our TV are likely to get lost. Hence, the CV cannot
immediately react to any adaptations to the initially
planned maneuver and follows the last received ma-
neuver of the TV or is even forced to abort the coop-
eration. Intuitively, considering the latter, a coopera-
tion cost arises for our CV without any benefit for the
traffic efficiency. Thus, CVM needs to consider the
quality of communication.
However, assessing the quality of communication
for CVM is a computationally expensive task (D
¨
uring
et al., 2014), as a large-scale simulation with hun-
dreds of vehicles equipped and acting with CVM is
required. Recent studies, as in (Xu et al., 2019), pri-
marily focused on small-scale scenarios with up to
three CVM enabled vehicles.
To evaluate the cost of CVM in large-scale sce-
narios, we consider the quality of communication and
contribute the following:
• We design an innovative and computational effi-
cient planning algorithm for CVM application en-
abling large-scale simulations in Section 4.
• We show the performance of ad hoc direct com-
munication for CVM in Section 5 under realistic
radio propagation channel assumptions.
• We analyze the cooperation cost with quality of
communication during a cooperative maneuver.
More precisely, we think that the improvement
in efficiency by starting the cooperation as early
as possible cannot compensate for the uncertainty
caused by imperfect communication.
The remainder of this paper is structured as fol-
lows: Background concerning V2X communication
and CVM is given in Section 2. We formulate the
impact of the quality of communication on CVM effi-
ciency, referring to a real-world intersection scenario
in Section 3. Existing approaches and initial studies
focusing on the requirements for quality of communi-
cation for CVM are analyzed in Section 6. We con-
clude the paper in Section 7.
2 BACKGROUND
We briefly describe the V2X communication relevant
for this work and explain the basic principle of a de-
centralized CVM mechanism.
2.1 V2X Communication
The European Telecommunication Standard Institute
(ETSI) standardized ITS-G5 in (Intelligent Transport
Systems, 2019) and employed 802.11p on the access
layer. To ensure robustness in vehicular scenarios,
which is characterized by high mobility, the chan-
nel bandwidth was reduced to 10 MHz per channel
(Mecklenbrauker et al., 2011), where the center fre-
quency is allocated at 5.9 GHz. For safety-relevant
V2X applications, three different sub-channels have
been reserved, where the Control Channel (CCH)
is already in use for the Day-1 V2X applications
(Llatser et al., 2019).
On the networking layer, ITS-G5 employs
GeoNetworking. Besides the possibility to forward
messages over multi-hops to destinations out of the
vehicle’s immediate communication range, especially
safety-relevant applications use Single Hop Broadcast
(SHB) for message dissemination. SHB guarantees
low-latency communication within a limited commu-
nication range.
What Cooperation Costs: Quality of Communication and Cooperation Costs for Cooperative Vehicular Maneuvering in Large-scale
Scenarios
395

As ITS-G5 relies on direct communication, there
is no central entity to control the channel access. De-
centralized Congestion Control (DCC) has been em-
ployed by ETSI in (Intelligent Transport Systems,
2018) to avoid channel congestion. DCC can reduce
the transmission rate or power, depending on the cur-
rently sensed channel state.
2.2 Decentralized CVM
CVM has gained increasing interest, as it is a promis-
ing mechanism to increase traffic efficiency on the
road (Lehmann et al., 2018). In centralized ap-
proaches, an independent authority monitors the traf-
fic within areas of interest. If cooperation is required,
the independent authority decides how to execute the
cooperation. Centralized approaches leverage their
increased environmental perception but have down-
sides on scalability. Further, they require an appropri-
ate infrastructure, such that the amount of cooperation
scenarios is limited.
In the paper at hand, we focus on decentralized
CVM using trajectories proposed by (Lehmann et al.,
2018). Each CVM enabled vehicle plans traffic-rule
compliant and drivable trajectories, which we derive
from the vehicle’s strategic path. To obtain the strate-
gic path for human drivers can be a challenging task.
In the following, we assume that the strategic path is
given. Trajectories represent the vehicle’s future path
within a limited time horizon. The trajectory, which
is not interfering with static or dynamic objects (other
vehicles), can be taken as the planned trajectory. If
there is more than one collision-free trajectory, the ve-
hicle computes the cost for these trajectories and se-
lects the trajectory with the lowest cost. The vehicle
will follow this trajectory and continuously broadcast
it to other vehicles via V2X communication.
At junctions or motorway access roads, there
might be trajectories with less cost but overlapping
with others. As the right-of-way has priority, the ve-
hicle without right-of-way is forced to choose a more
cost expensive trajectory. With a second trajectory,
cooperation can be requested. A vehicle with a col-
lision of such a trajectory with its planned path can
adapt its trajectory, e. g., slowing down. If the colli-
sion is solved, the TV takes the desired as its planned
trajectory.
3 COOPERATION AT
INTERSECTIONS
First, we briefly describe the real-world Kooperative
Perzeption (cooperative perception) (Ko-PER) inter-
Figure 1: Ko-PER Intersection scenario adopted from (Kra-
jzewicz et al., 2002).
section scenario, depicted in Figure 1, which we refer
to throughout this paper. Second, we detail why the
quality of communication significantly impacts the
performance of CVM.
3.1 Ko-PER Scenario
As already mentioned, CVM aims at increasing traffic
efficiency in challenging environments. We selected
an urban intersection scenario, as cities are challeng-
ing in terms of radio propagation as well as for ma-
neuver coordination. In (Strigel et al., 2014), an ur-
ban intersection scenario in Aschaffenburg, Germany,
was analyzed in detail. The authors tracked and eval-
uated the vehicular traffic using video cameras. From
this study, valid scenarios were extracted in (Jesen-
ski et al., 2019). From these scenarios, we picked the
most interesting scenario for CVM, which is depicted
in Figure 1.
Vehicular traffic from the north-west and south-
east side are stopping during the red light phase. We
consider these vehicles (not depicted in Figure 1), as
we are interested in the channel congestion within the
intersection caused by V2X communication. Vehi-
cles can pass the intersection during the green light
phase. In the following, we will focus on vehicles
from the north-east and south-west. We let vehi-
cles from the north-east only drive straight as this in-
creases the need for cooperation in our scenario. For
vehicles from the south-west, we consider vehicular
traffic with the intention of different directions at the
intersection, i. e., a small portion of the vehicles want
to turn left, and the others want to drive straight. Our
TV is part of the traffic flow from the south-west to
turn left. These vehicles require cooperation to pass
the intersection. If no cooperation partner is found,
they have to wait in the intersection for a sufficient
gap in the oncoming vehicular traffic.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
396
3.2 Impact of Imperfect
Communication
CVM requires a CV to change its planned path, e. g.,
change speed to open a sufficient gap for the TV. This
change is usually connected to cooperation cost in
terms of speed loss for the CV. Starting the cooper-
ative maneuver at vast distances allows for early co-
operation and, hence, grants more time for the CV to
open a gap. This additional time prevents unneces-
sary deceleration and reduces cooperation costs. On
the other side, the quality of communication is high
at smaller distances, i. e., the path loss is highly cor-
related with the distance between the transmitter and
receiver. Additionally, the probability of shadowing
due to other objects (e. g., vehicles) increases with
distance.
For the intersection scenario introduced in Sec-
tion 2, we also consider a rich scattering environment
due to buildings and other vehicles. Compared to
motorway access roads, the intersection is character-
ized by relatively low speed and hence low Doppler
shifts (Mecklenbrauker et al., 2011). Shadowing due
to buildings might be reduced, considering V2X com-
munication with oncoming traffic for cooperation -
at least for ad hoc communication. Even though the
speed in urban areas is relatively low, the vehicular
traffic is often highly congested. These traffic jams
lead to varying and unpredictable arrival times at the
intersection.
Considering the characterization of an intersec-
tion, as mentioned above, several challenges for CVM
arise: Constructive interference might lead to suc-
cessfully received messages at vast communication
distances. As of today, CVM applications are not de-
signed to predict message loss of subsequent MCMs
caused by a highly fluctuating radio propagation
channel at vast communication distances. As stated
previously, the efficiency of cooperation leverages
vast cooperation distances. Hence, the CVM appli-
cation might immediately start the cooperation with
the first received MCM. Due to the highly congested
vehicular traffic in intersections, adaptations to the
planned maneuver are likely to be required. Due to
radio propagation effects, subsequent messages might
get lost, such that the CV and, more precisely, the
CVM application is unaware of any changes in the
planned maneuver of the TV, which increases with
increasing AoI.
In this paper, we aim at characterizing additional
costs, which arise from imperfect communication.
Therefore, we consider ad hoc communication tech-
nology. Further, considering the cooperation cost and
quality of communication, we design a novel CVM
planning algorithm, which can simulate maneuver co-
ordination in large-scale scenarios. In other words,
we make use of data provided by the traffic simulator
to obtain the points reachable by cooperating vehicles
required for the trajectory generation.
4 SYSTEM DESIGN
CVM requires obtaining a set of trajectories to repre-
sent the future path of a vehicle. CVM algorithms are
considered to be computationally expensive (D
¨
uring
et al., 2014). Thus, it could be challenging to analyze
the quality of communication in large-scale scenario
simulations with hundreds of vehicles. Our focus is to
reduce the computationally expensive trajectory gen-
eration for each simulated vehicle and simplify the
detection of trajectory collisions. Therefore, we inte-
grate a CVM application into a communication sim-
ulator, which is coupled with a traffic simulator. For
the generation of trajectories, we make use of the data
provided by the traffic simulator, such as route and
map information, to reduce the computational com-
plexity. That way, we can analyze the efficiency of
CVM under realistic V2X communication conditions
in large-scale scenarios.
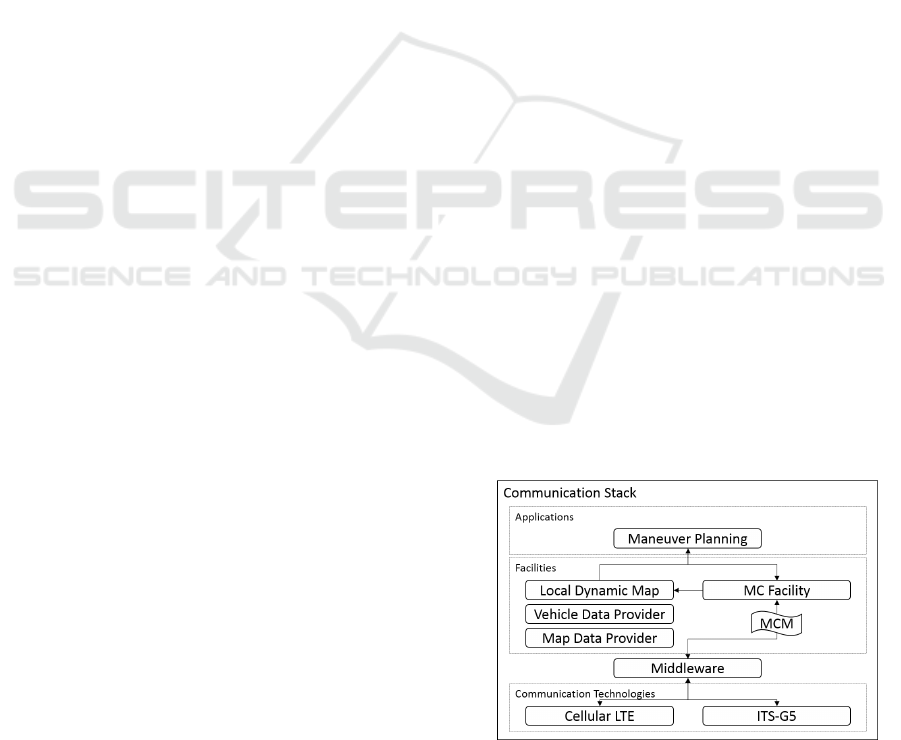
4.1 System Architecture
The central entity of our architecture is the middle-
ware, which can be connected to multiple communi-
cation interfaces, e. g., cellular or ad hoc communica-
tion. Within this paper, we focus on ad hoc communi-
cation. As proposed by ETSI in (Intelligent Transport
Systems, 2010), the facility layer is composed of the i)
application support, ii) information support, and iii)
communication support facilities. The system archi-
tecture is depicted in Figure 2.
Figure 2: System Architecture of the communication stack.
The information support facility is composed of
the Map Data Provider (MDP), Vehicle Data Provider
What Cooperation Costs: Quality of Communication and Cooperation Costs for Cooperative Vehicular Maneuvering in Large-scale
Scenarios
397
(VDP), and Local Dynamic Map (LDM). Among oth-
ers, the MDP stores the vehicle’s position and infor-
mation on the current road and lane as well as the
strategic path of the vehicle. Vehicle dynamic data
such as the current speed and acceleration are updated
in the VDP. The LDM stores received V2X messages
as objects, which are indicated by the application sup-
port facilities.
The application support facilities register and
connect themselves to the middleware. When pack-
ets are requested from the application support facil-
ities, the middleware selects the appropriate commu-
nication interface. We allow for a static and dynamic
interface selection scheme. For now, we focus on the
static interface selection scheme and leave dynamic
selection for future work. Within the application sup-
port facilities, messages are either build continuously
or on request.
We give details to the Maneuver Coordination
(MC) facility, describe our proposed MCM for-
mat, and explain the Maneuver Planning Application
(MPA).
4.2 Maneuver Coordination (MC)
Facility
The MC facility is responsible for the generation
of MCMs. According to the state of the triggering
conditions of the facility, the MC facility builds an
MCM based on the currently available data. The
VDP, MDP, and MPA provide data for the different
MCM containers. Upon data fetching and generation,
MCMs are timestamped to keep track of their AoI.
In this paper, the triggering conditions follow a con-
stant message generation rate. A constant triggering
condition allows us to better analyzing the impact of
quality of communication on CVM. More appropriate
data-driven generation rules can also be implemented.
4.3 Maneuver Coordination Message
(MCM)
For CVM, different message formats have been re-
cently proposed in the literature, e. g. (Correa et al.,
2019; Lehmann et al., 2018). Our adaptations to the
proposed formats aim at decreasing the message size
by removing unnecessary information. We adopt the
idea of a collision-free planned trajectory and an op-
tional desired trajectory from (Lehmann et al., 2018).
The proposed MCM is given in Table 1. Each tra-
jectory consists of a unique identifier, the type of the
trajectory (desired or planned), the cost of the trajec-
tory, and a series of trajectory sections. In (Lehmann
et al., 2018), a trajectory section is composed of a
Table 1: Structure of the MCM.
Maneuver Coordination Message (MCM)
Container
Generation Delta Time
Absolute Reference Position
Trajectories
Identifier
Trajectory
Type
Cost
Time Horizon
Sections
Position
Relative Position
Road Information
Polynomial
Coefficients
Heading
Validity Range
longitudinal and lateral polynomial, where the for-
mer is the vehicle’s longitudinal position as a function
of time. The latter polynomial is the lateral position
as a function of the longitudinal position. In our ap-
proach, we neglect the lateral polynomial for the fol-
lowing reasons: In common traffic simulators, the lat-
eral position within the lane is not reflected, because
its computation generates unnecessary overhead and
increases the message size.
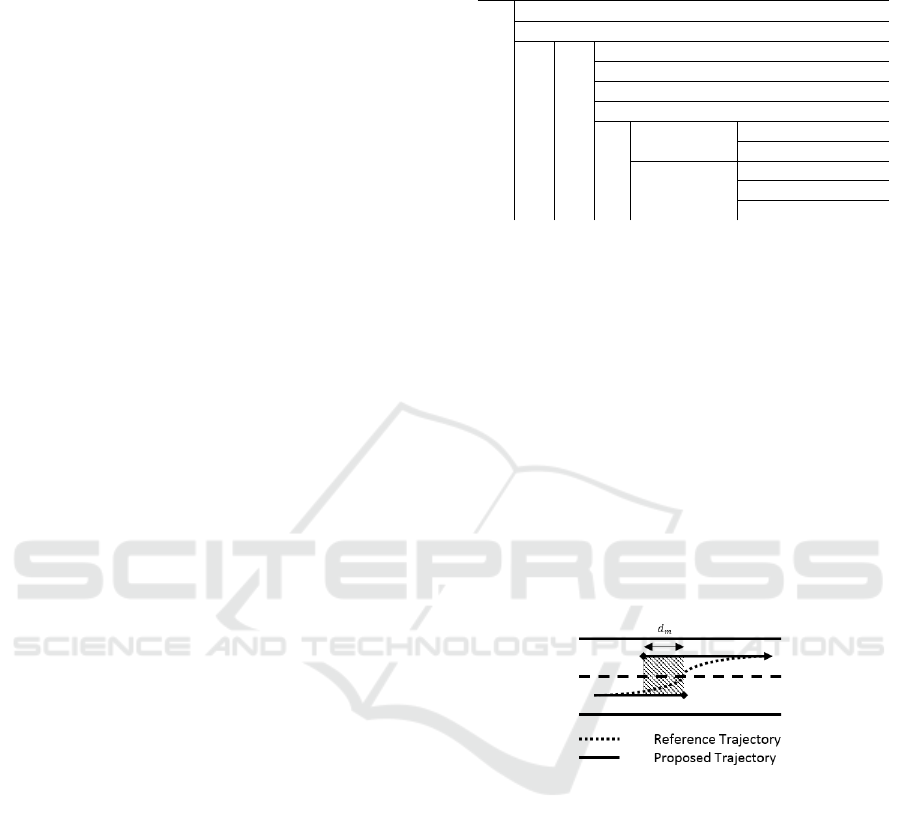
For CVM, the lateral polynomial is essential to de-
tect lane changes, as the vehicle occupies two lanes
at the same time. We propose to extend the valid-
ity of the longitudinal polynomial on the current lane.
In parallel, our proposed trajectory also occupies the
other lane with a second longitudinal polynomial for
the time of the lane change, as depicted in Figure 3.
Figure 3: Proposed longitudinal Trajectory.
The trajectory type differentiates between the
planned and optional desired trajectory. The cost of
each trajectory is denoted in the proposed message,
where the cost of the optional desired trajectory is
always lower than the planned trajectory, i. e., the
desired trajectory improves the vehicle’s traffic effi-
ciency.
Each trajectory is composed of a set of trajectory
sections to cover the envisaged time horizon, where
the time horizon of a trajectory is also denoted in the
proposed message. Each trajectory section contains
the relative position to denote its starting point, refer-
ring to the absolute reference position. Further, each
trajectory section contains the respective road infor-
mation, including the unique road and lane identifiers
obtained from the MDP.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
398

Each trajectory section is composed of a maxi-
mum of two polynomial functions, where each longi-
tudinal polynomial function has a maximum degree of
two. Both limitations guarantee to reduce the number
of possible trajectories and, thus, the computational
complexity of the trajectory generation. The head-
ing of each polynomial function describes the direc-
tion where the longitudinal path is pointing to. The
longitudinal validity of the polynomial is expressed
as validity range, i. e., start and end of the respective
polynomial function.
4.4 MPA
The Maneuver Planning Application (MPA) is com-
posed of three submodules: i) Trajectory Generation,
ii) Trajectory Processing, and iii) Cooperation Plan-
ning, which is adapted from the research within the
IMAGinE
1
project.
Trajectory Generation. A strategic path describes
the vehicle route from its current position to its fi-
nal destination. We assume that any application from
the MDP can obtain the strategic path. This assump-
tion holds for fully automated vehicles. For human
drivers, the most probable path must be estimated.
The strategic path is composed of a list of roads
and junctions, where we assume that two roads are al-
ways connected to a junction. We store the informa-
tion of each road and junction such as right-of-way,
junction type (traffic light, right-before-left,...), and
speed limits in a list of trails. Further, the maneuver
type (straight, left-turn,...) for each trail is obtained
from the strategic path. When passing a road or a
junction, the respective trail is removed from the list.
Each trail is composed of a list of segments. Seg-
ments describe the shape of roads and junctions. A
straight road can be described with one segment de-
noting the start and end of the road. For road curves,
the number of segments increases.
From each trail, a trajectory section is obtained.
Hence, the first and last segment of a trail also de-
scribe the start and end of the respective trajectory
section. Using existing segment points provided by
the traffic simulator decreases the computational com-
plexity to obtain reachable points for the trajectory
generation. While driving on a trail, the first segment
is continuously adapted to the vehicle’s current posi-
tion.
As mentioned before, we limited the number of
polynomial functions. Hence, the first longitudinal
polynomial function ranges from the start of the trail
1
https://imagine-online.de/en/home/
to one of the segments within the trail. The second
longitudinal polynomial function connects to the first
polynomial and ranges until the end of the trail. We
can also obtain only one polynomial function, which
ranges from the start to the end of the whole trail. If
we have two longitudinal polynomial functions, the
first is of the first degree, and the second of second
degree, i. e., the first longitudinal polynomial function
follows the trail starting with the speed of the last trail.
Each trajectory starts with the current speed of the ve-
hicle. The second polynomial function varies the tar-
get speed at the end of the trail, which also considers
the speed limit of the subsequent trail.
Further, we ensure to adjust the target speed de-
pending on the junction and maneuver type of the sub-
sequent trail, e. g., at junctions with right-before-left,
we reduce the target speed. From the target speed
mentioned above at the end of each trail, we reduce
the speed iteratively until we would stop at the end of
a trail to create trajectories with different speed pro-
files. That way, we ensure that a vehicle always ob-
tains at least one collision-free trajectory, i. e., a tra-
jectory that stops at the end of a trail in front of a
junction.
The absolute heading of each section is obtained
from the position of its start and end segment, to
get the direction where each longitudinal polynomial
function is pointing to.
To avoid trajectory collisions with preceding ve-
hicles, we also adapt the maximum speed of the tra-
jectory to the speed of preceding vehicles. As all ve-
hicles in the simulation are equipped with CVM, we
obtain the position and speed of other vehicles from
the LDM. If a vehicle is in close range and in front
of us, we limit our maximum trajectory speed to the
respective vehicle’s current speed. The speed can be
obtained from the first polynomial of the planned tra-
jectory. That way, we avoid collisions with vehicles
in traffic jams.
Trajectory Processing. The set of generated trajec-
tories are now scored and checked for collision with
other trajectories. In order to score the trajectories,
we denote the trajectory which represents the longest
path among all other generated trajectories within the
given time horizon as best, and we normalize the cost,
ranging from 0 to 1, where 1 denotes the worst trajec-
tory. The time horizon is equal for all generated tra-
jectories. After that, the trajectories are filtered such
that we eliminate trajectories with similar costs, i. e.,
the filtered trajectories differ from each other.
All generated trajectories are now checked for col-
lision with received trajectories, which are stored in
the LDM. We make use of the proposed collision de-
What Cooperation Costs: Quality of Communication and Cooperation Costs for Cooperative Vehicular Maneuvering in Large-scale
Scenarios
399

tection from (Ericson, 2004). In this approach, both
the generated and received polynomial functions are
sampled in time steps. At each time step, the distance
between both sampled points is checked. If the dis-
tance is below the diameter of a circle, a collision is
detected. For the diameter of each circle, we con-
sider the width of the vehicle. In our approach, we
consider two circles, one representing the front and
the other the back of the vehicle to take the vehicle’s
length into account. This representation also consid-
ers a safety-margin for each vehicle.
The generated trajectories are grouped in i)
collision-free, ii) collision and right-of-way, and iii)
collision without right-of-way.
Cooperation Logic. From the first two groups, the
trajectory with the lowest cost is denoted as reference.
In our simulation, we were able to show that this tra-
jectory is the most probable, i. e., our vehicle follows
this trajectory.
If the selected reference trajectory is from the sec-
ond group, we are requested to offer cooperation, i. e.,
we have detected a collision and have the right-of-
way. To enable cooperation, we select the cheapest
trajectory from the first group - denoted as an alter-
native.
Further, we aim at improving our traffic efficiency
by identifying potential cooperation. Therefore, we
select the cheapest trajectory from the third group and
denote this trajectory as desired, if its cost is lower
than the reference.
We define c
t
as the cooperation cost threshold for
trajectories, which is equivalent to all CVM vehicles.
First, the cooperation cost between the reference and
alternative trajectory is compared. Cooperation is
offered by selecting the alternative trajectory as our
planned trajectory, if c
alt
− c
ref
< c
t
holds, i. e., our
arising cooperation cost is acceptably low. Otherwise,
we implicitly decline cooperation. Second, coopera-
tion is requested by selecting the desired trajectory, if
c
ref
−c
des
> c
t
holds, i. e., we gain more from cooper-
ation than the respective CV is required to spend.
5 RESULTS
In this section, the proposed system is analyzed in de-
tail. Therefore, we first describe our simulation setup
and explain the required assumptions for the commu-
nication protocol stack. Second, the metrics we use to
evaluate the system are detailed. In the end, we show
our simulation results for traffic dynamics, quality of
communication, and cooperation costs.
Table 2: Parameters for the Maneuver Planning Algorithm.
Parameters Value
Simulation Time 300s
Message Frequency 5Hz
Target Speed Variation 2m/s
Maximum Acceleration ±4m/s
2
Speed Reduction Factor 2.6
Time Horizon 10s
Collision Detection Time Step 200ms
Cooperation Cost Threshold 0.1
Scale Cost Trajectories 0.2
Vehicle Density Route 1 550veh/h
Vehicle Density Route 2 450veh/h
Vehicle Density Route 3 150veh/h
5.1 Simulation Assumptions
The parameters for the evaluation are listed in Table 2.
The target speed variation denotes the iteration
from the maximum allowed speed at the next trail to
0, where more iterations can create more trajectories
when reducing this parameter. If a segment point is
very close to the subsequent trail, the acceleration can
be unbounded if the target speed is different from the
last considered speed. This parameter and the speed
reduction factor must be adjusted to the driver model
of the traffic simulator. At junctions, the maximum
allowed speed does not change. Hence, to avoid colli-
sions with other vehicles, e. g., at junctions with right-
before-left, vehicles reduce the speed in front of junc-
tions. We analyzed the driver model of our traffic sim-
ulator, where we found the speed reduction factor to
be roughly v · 2.6
−1
.
To detect collisions with other trajectories, we it-
erate over both trajectories within time steps. Increas-
ing the time step decreases the computational com-
plexity of the simulation, but also we might miss po-
tential collisions, as our sampling rate is too low. We
think that it is worth to adapt this parameter to the
speed of the vehicle and its context, i. e., we expect
more collisions at intersections and less on straight
roads.
Further, the post-filtering of trajectories signifi-
cantly impacts the computation time of the simula-
tion. Filtering too many trajectories decreases the
efficiency of CVM, as we might miss potential tra-
jectories for the cooperative maneuver. On the other
hand, this parameter impacts the computational com-
plexity of the simulation significantly, i. e., all filtered
trajectories are checked for collision with all received
trajectories. The vehicle density for each route is se-
lected such that cooperation is required, i. e., a vehicle
with the intention of a left-turn might require cooper-
ating with an oncoming vehicle. On the other side, the
chosen density does not induce too many traffic jams.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
400
We simulated our scenario for 300 s.
For the representation of vehicular traffic flow, we
use the Simulation of Urban Mobility (SUMO) 1.0
(Krajzewicz et al., 2002). We extracted the KoPER
intersection with Open Street Map (OSM) and con-
verted it to a SUMO readable file using Netconvert,
which is part of the SUMO package.
For the simulation of V2X communication, we
use the event-discrete network simulator OMNeT++
5.4.1 (Varga and Hornig, 2008). To connect SUMO
with OMNeT++, we use Veins 5.0 (Sommer et al.,
2011). Veins makes use of the bidirectional Traffic
Command Interface (TraCI) to obtain traffic and map-
related data. TraCI also allows controlling individ-
ual vehicles, e. g., change lane or speed. Furthermore,
Veins implements the ITS-G5 access layer 802.11p.
We extended this communication framework by a
Geo Networking Protocol (GNP) and Basic Transport
Protocol (BTP) (Intelligent Transport Systems, 2017)
layer, which we described in Section 2. The channel
model and communication parameters for ITS-G5 are
taken from (Bischoff et al., 2019).
5.2 Metrics
We use three metrics to evaluate the impact of imper-
fect communication on CVM: traffic dynamic, AoI,
and required speed reduction for cooperation. Fur-
ther, we analyze the number of generated trajectories
for different vehicle routes within the considered sce-
nario.
The arrival time for vehicles, especially at the in-
tersection, is assumed to vary significantly. To eval-
uate this variation, we define a measurement point
150m in front of the intersection. We measure the
speed of this vehicle at the measurement mentioned
above point and evaluate the mean and standard devi-
ation of the required time to the intersection.
The AoI captures how long received MCMs, saved
as objects in the LDM, are outdated. We measure and
obtain the average AoI as a function of the distance
to the intersection when a collision of trajectories is
detected. For collision detection, we consider the AoI
of the respective trajectory. To evaluate the required
speed reduction of a cooperative maneuver, we eval-
uate the difference in speed as mean and standard de-
viation of the alternative and reference trajectory as a
function of the distance to the intersection.
5.3 Evaluation
In the following, we analyze and discuss our results
considering the traffic dynamics for the Ko-PER inter-
section, the number of generated trajectories for dif-
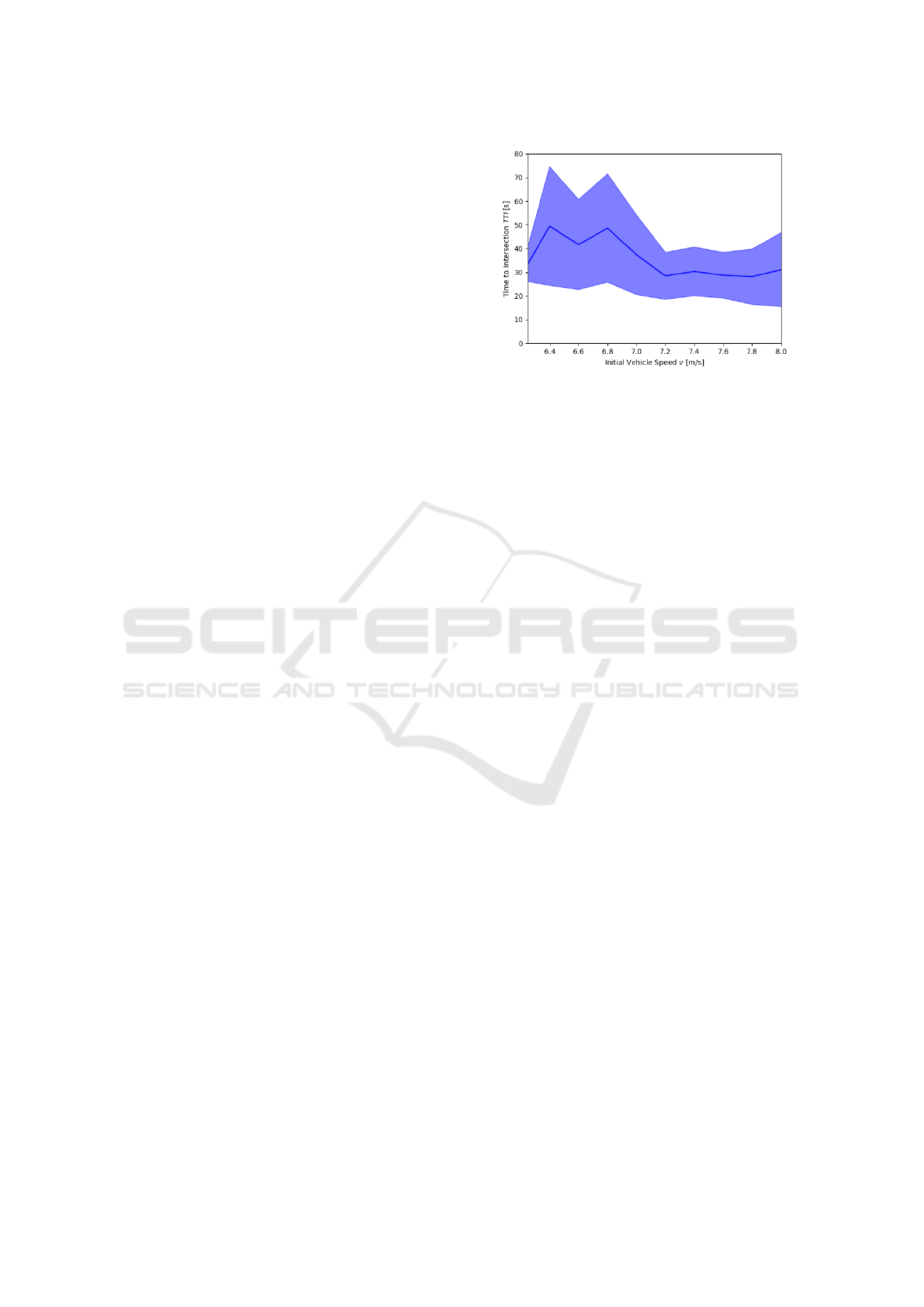
Figure 4: Variation of the time to intersection over the initial
speed at the measurement point.
ferent roads, the AoI, and the cooperation cost both
while coordinating the cooperative maneuver. For all
evaluations, we are only planning the maneuver and
not executing it.
5.3.1 Traffic Dynamic
In Figure 4, the variation of the required time to
reach the intersection is depicted over the initial speed
recorded at the start of the measurement point. The
measurement point is 150 m in front of the intersec-
tion, which correlates with the maximum transmis-
sion range of two approaching vehicles. The mean
of the TTI ranges from 30 to 45s and is depicted as
a dark blue bold line. The mean TTI first increases
from 6 to 6.5 m/s and slightly decreases to 30 s at
7m/s. The standard deviation is depicted as a light
blue area. At 6.5 m/s, the standard deviation is high-
est at approximately 25 s, which is more than half of
the mean TTI. This significant standard deviation is
a result of occurring traffic jams in front of the inter-
section, as vehicles with the intention of a left-turn
wait for an open gap in the oncoming traffic flow.
From Figure 4, we can conclude that, as the time to
arrive at the intersection varies significantly, the vari-
ation of the arrival time at the intersection cannot be
considered in the disseminated trajectories. Hence,
we must continuously adapt the generated trajecto-
ries while approaching the intersection. Further, the
highly dynamic vehicular traffic emphasizes the need
for reliable communication, as outdated information
might be unsuitable for planning a cooperative ma-
neuver.
5.3.2 Generated Trajectories
In Figure 5, the number of different generated trajec-
tories is denoted for all three considered routes. The
first route represents vehicles of the oncoming traf-
fic flow. The second route represents vehicles driv-
What Cooperation Costs: Quality of Communication and Cooperation Costs for Cooperative Vehicular Maneuvering in Large-scale
Scenarios
401
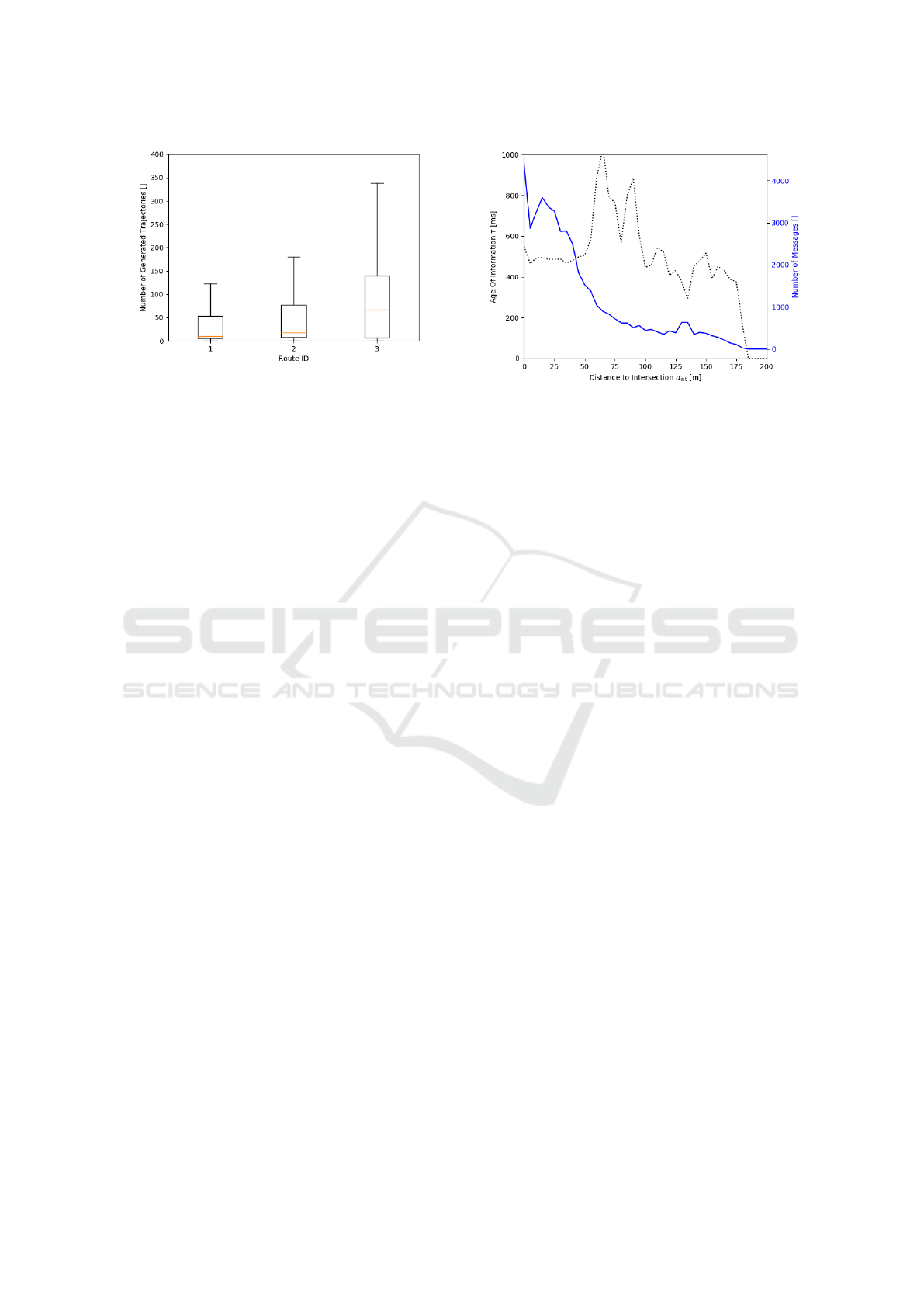
Figure 5: Number of generated trajectories for three differ-
ent routes.
ing from south-west to north-east, where the second
route is going straight, and the third represents a left-
turn. The lower and upper quartile for the first route
range from 5 to 50 trajectories and the lower and up-
per whiskers from 0 to approximately 125. For the
second route, the lower quartile and whisker is simi-
lar to the first route, where the upper whisker reaches
up to 200 trajectories. From this, we can conclude that
the complexity of the first two routes is comparable as
both routes are going straight.
For the third route, the number of generated tra-
jectories is significantly higher, where the median is
at 75, and the upper whisker ranges up to 350. The
complexity of this route is much higher compared to
the first two routes, i. e., the shape of a left-turn re-
quires more segments than a straight road, where the
median of generated trajectories is below 25.
With an increasing amount of trajectories, the
computational complexity of the simulation in-
creases, which is contradictory when simulating
large-scale scenarios. In contrast to that, having more
trajectories increases the possible driving maneuvers
for the cooperative maneuver. For straight roads, we
are not expecting to require cooperation and cannot
improve our current maneuver through cooperation.
Thus, we only require different trajectories to offer
cooperation. In contrast to that, a vehicle with the
intention of a left-turn might require cooperation. In
order to find the most efficient trajectory, a large set
of different trajectories resulting in different driving
maneuvers is beneficial.
5.3.3 Quality of Communication
Now, we evaluate the quality of communication while
coordinating a cooperative maneuver, i. e., at least one
of the generated trajectories collides with a received
trajectory of another vehicle. We evaluate the quality
of communication as AoI and the number of received
Figure 6: AoI and number of received messages over the
distance to the intersection while cooperating.
messages both as a function of the remaining distance
to the intersection. The left axis and the black dot-
ted line of Figure 6 depict the mean AoI. MCMs are
stored in the LDM, where MCMs with an AoI larger
than 5 s are removed from the LDM. The mean AoI
ranges from 0 to 1000 ms, where 0 s would represent a
direct reception and processing of the message (prop-
agation and access delay at the Medium Access Con-
trol (MAC) layer is considered but below 1 ms). Up
to 50 m in front of the intersection, the mean AoI is
approximately 500 ms. At a distance to the intersec-
tion between 50 to 100 m, the mean AoI ranges from
500 to 1000ms. From 100 to 175m, the mean AoI de-
creases again and ranges from 300 to 500 ms, which
is surprising at first sight. These phenomena can be
explained with the number of considered MCMs. For
this scenario, the number of MCMs below 50 m with
a collision of at least one generated trajectory is above
3000 messages. The number of processed MCMs sig-
nificantly decreases at a distance of 50 m in front of
the intersection and reaches 0 at approximately 175 m.
This is in accordance with the recent literature, e. g.
(Cunha et al., 2016; Bischoff et al., 2019), where the
authors indicated that a reliable V2X communication
using ad hoc communication is limited to a maximum
of 300m. Considering a similar distance to the inter-
section of the transmitter of the MCMs results in a
communication range of 300m.
5.3.4 Cooperation Cost
In the following, we evaluate the required speed re-
duction to enable a cooperative maneuver from the
perspective of the CV. As described in Section 4,
from all generated and filtered trajectories, the CV
selects the cheapest trajectory as a reference, either
with or without a collision of other received trajecto-
ries, i. e., the CV has right-of-way for the upcoming
maneuver. If the planned trajectory has a collision, an
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
402
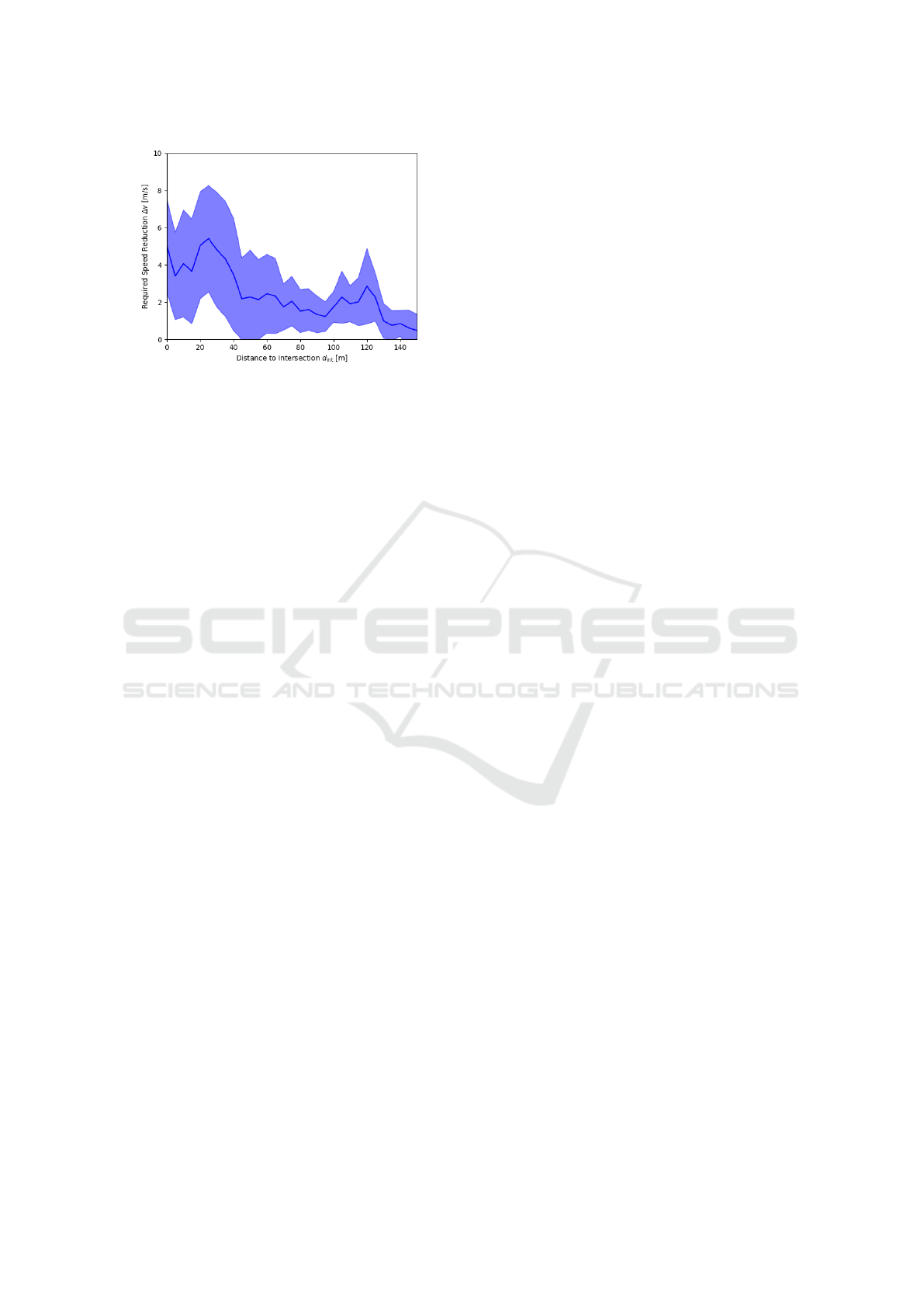
Figure 7: Required speed reduction for a cooperation offer
over the distance to the intersection.
alternative trajectory can be selected in order to offer
cooperation. In Figure 7, the difference in speed at
the end of both the reference and alternative trajec-
tory is depicted as a function of distance to the inter-
section. The mean required speed reduction decreases
from 6 m/s below 1 m/s at 150m. In contrast to the
traffic dynamic in Figure 4, the standard deviation de-
creases with increasing distance to the intersection,
i. e., a considerable distance to the intersection grants
more time to reduce the speed and allows for more
alternative trajectories. At a distance to the intersec-
tion of 50 m, the standard deviation of the required
speed reduction reaches 0m/s. In this case, the al-
ternative trajectory is more expensive in terms of the
reachable distance within the time horizon. On the
other side, the alternative trajectory grants more time
for the TV to pass the intersection by reducing the
speed at the beginning of the trajectory and acceler-
ating again such that the speed at the end of both tra-
jectories is comparable. This also emphasizes that the
cost of each trajectory should not be obtained solely
from the speed at the end of each trajectory, as this
neglects speed variations within the trajectory.
6 RELATED WORK
There is a tremendous amount of research for
communication-based CVM. Promising approaches
targeting CVM are described in the following. Fur-
ther, we summarize existing work focusing on re-
quirements for different types of V2X applications.
6.1 CVM Approaches
CVM range from decentralized to centralized and
from scenario-specific to generic approaches.
First, we focus on decentralized CVM ap-
proaches. A reference architecture for cooperative
driving is proposed in (Franke et al., 2014). The au-
thors focus on message definition and the interaction
of system components to enable CVM. They divide
CVM in Sense, Model, Plan, and Act phases, which
provides a modular and flexible architecture. On the
downside, this approach requires seven different types
of messages and explicit coordination, which limits
the applicability to specific scenarios.
(D
¨
uring et al., 2014) propose a more generic ap-
proach to increase road safety, comfort, and efficiency
using trajectories. The authors focus on path plan-
ning, including the generation of target points and tra-
jectory generation, also mentioning risk assessment
and maneuver execution by selecting the best trajec-
tory combination from their own and received trajec-
tories. The authors conclude that the approach applies
to different kinds of scenarios, but also, the algorithm
requires time-expensive computation.
The approach mentioned above is continued in
(Lehmann et al., 2018), introducing a planned and de-
sired trajectory and detailing the maneuver coordina-
tion process. That way, the authors realize implicit
coordination without confirmation, which decreases
message overhead and coordination time.
(Xu et al., 2019) propose an extension of the con-
cept mentioned above and integrate it into a micro-
scopic simulation framework. The authors extend the
negotiation pattern to increase reliability due to con-
flicting maneuvers or imperfect communication. Al-
though they show an increase in traffic efficiency us-
ing CVM in a small-scale simulation scenario, the ap-
proach again introduces explicit coordination.
In (Correa et al., 2019), the authors build upon the
approach in (Lehmann et al., 2018) and propose to
extend the ETSI MCM format, also allowing support
of road infrastructure to increase traffic safety further.
Also, the authors discuss and evaluate the static and
dynamic message generation rules for MCMs. In con-
trast to static generation rules, a dynamic rule can
adapt to the vehicular context and thus provides in-
formation that is more relevant but also reducing the
message overhead.
(Milanes et al., 2011) propose a centralized CVM
approach for on-ramp merging using fuzzy logic. A
central entity controls the arrival times for vehicles at
the merging zone, which aims at increasing the ve-
hicular traffic flow efficiency. Compared to the ap-
proaches mentioned above, the authors focus on the
longitudinal path of vehicles, which significantly de-
creases the computational complexity and message
overhead.
In summary, the recent literature already pro-
vides promising approaches for CVM, focusing on
explicit and implicit coordination mechanisms. Un-
What Cooperation Costs: Quality of Communication and Cooperation Costs for Cooperative Vehicular Maneuvering in Large-scale
Scenarios
403

fortunately, these approaches are not considering the
impact of the quality of communication on CVM.
Other approaches compensate for poor quality of
communication by introducing additional redundancy
for highly impactful messages but do not consider the
influence on CVM (Meuser et al., 2019). Further, ini-
tial evaluation studies focus on small-scale scenarios
with very few vehicles involved.
Our approach aims at improving the computa-
tional complexity of CVM. Thus, we can evaluate our
approach in a large-scale urban intersection scenario,
also considering the impact of the quality of commu-
nication using a realistic channel model.
6.2 Communication Requirements for
V2X Applications
Requirements targeting the quality of V2X commu-
nication are separated into the domain of road safety,
efficiency, and infotainment. General vehicular de-
mands targeting the network performance are given in
(Zhao et al., 2019). The authors focus on the commu-
nication delay and capable vehicle mobility and den-
sity to classify different communication technologies.
As these V2X applications are not further detailed,
specific communication requirements for CVM can-
not be derived.
(Zheng et al., 2015) survey communication re-
quirements for different safety and non-safety ap-
plications, primarily focusing on message frequency
and latency. The authors detail specific requirements
for cooperative lane change focusing on message fre-
quency and latency, thereby neglecting the reliability.
In (Mir and Filali, 2018), the authors classify co-
operative lane change as an active road safety applica-
tion and specify requirements for message frequency,
delay, and reliability. Both studies only focus on
cooperative lane change and leave requirements for
other CVM applications open.
For cooperative maneuvers in general, (Boban
et al., 2018) derive requirements for latency, reliabil-
ity, and communication range from (3GPP, 2019).
The recent literature already provides communi-
cation requirements for CVM, focusing on latency,
reliability, and message frequency separately. The
impact on the performance of CVM when violating
these requirements has not been thoroughly validated.
We think that, concerning the quality of commu-
nication, the performance of CVM relies on the AoI.
Therefore, our study provides a reasonable network
performance study, explicitly focusing on CVM for
ad hoc communication in an urban intersection sce-
nario.
7 CONCLUSION
In this paper, we introduce a maneuver planning algo-
rithm for a decentralized CVM application. In recent
literature, the evaluation of CVM was foremost eval-
uating for small-scale scenarios with less than three
vehicles. In order to allow for large-scale simula-
tions, we proposed an efficient method to plan tra-
jectories for CVM and described how to identify col-
lisions with other received trajectories. Accordingly,
we proposed a novel message format for maneuver
coordination, which aims at reducing the message
size and complexity of the trajectory generation to en-
able large-scale simulations. The maneuver planning
application is composed of the generation of trajecto-
ries, the trajectory processing (filtering and collision
detection), and the cooperation logic, where we ex-
plained the function of each module in detail. With
these tools at hand, we show that our planning al-
gorithm is capable of simulating CVM in large-scale
scenarios with more than hundreds of vehicles at the
same time, all equipped with a CVM application over
a simulation time of 300s.
Our simulation results show that the traffic dy-
namic, i. e., the required time to reach the intersection,
varies significantly, which motivates the need for high
quality of communication as the planned trajectory
requires high frequent updates. Further, our novel
planning algorithm is capable of generating hundreds
of different trajectories, where our design generates
more trajectories for complex scenarios such as a left-
turn compared to a straight road. When we analyze
the quality of communication and cooperation cost
while planning a cooperative maneuver with other ve-
hicles, we see that the standard deviation and mean
of the required speed reduction for the CV decreases
with increasing distance to the intersection. On the
other side, the quality of communication significantly
decreases above 50 m to the intersection. Thus, imper-
fect communication causes CVM to plan on outdated
trajectories, where the AoI of trajectories can be up to
400ms during the cooperation process.
ACKNOWLEDGEMENTS
The German Federal Ministry for Economic Affairs
and Energy (BMWi) supports this research within
the project IMAGinE - Intelligente Man
¨
over Au-
tomatisierung - kooperative Gefahrenvermeidung in
Echtzeit (Intelligent maneuver automation – cooper-
ative hazard avoidance in real time).
Furthermore, this work has been funded by the
DFG within the CRC 1053 - MAKI (B1).
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
404

REFERENCES
3GPP (2019). Enhancement of 3GPP support for V2X sce-
narios. Technical specification, 3rd Generation Part-
nership Project.
Bischoff, D., Berninger, H., Knapp, S., Meuser, T.,
Richerzhagen, B., H
¨
aring, L., and Czylwik, A. (2019).
Safety-relevant v2x beaconing in realistic and scalable
heterogeneous radio propagation fading channels. In
In Proceedings of the International Conference on
VEHITS, volume 5. SCITEPRESS.
Boban, M., Kousaridas, A., Manolakis, K., Eichinger, J.,
and Xu, W. (2018). Connected roads of the future:
Use cases, requirements, and design considerations
for Vehicle-to-Everything communications. IEEE Ve-
hicular Technology Magazine, 13(3):110–123.
Correa, A., Alms, R., Gozalvez, J., Sepulcre, M., Rondi-
none, M., Blokpoel, R., L
¨
ucken, L., and Than-
davarayan, G. (2019). Infrastructure support for coop-
erative maneuvers in connected and automated driv-
ing. In IEEE Intelligent Vehicles Symposium, pages
20–25.
Cunha, F., Villas, L., Boukerche, A., Maia, G., Viana, A.,
Mini, R. A., and Loureiro, A. A. (2016). Data com-
munication in VANETs: Protocols, applications and
challenges. Ad Hoc Networks, 44:90–103.
D
¨
uring, M., Franke, K., Balaghiasefi, R., Gonter, M.,
Belkner, M., and Lemmer, K. (2014). Adaptive coop-
erative maneuver planning algorithm for conflict res-
olution in diverse traffic situations. In ICCVE, pages
242–249.
Ericson, C. (2004). Real-Time Collision Detection. CRC
Press, Inc., USA.
Franke, K., Gonter, M., D
¨
uring, M., Lemmer, K., Balaghi-
asefi, R., and K
¨
uc
¨
ukay, F. (2014). A reference archi-
tecture for CISS/CDAS within the field of cooperative
driving. In ICCVE, pages 357–363.
Fu, L. and Hellinga, B. (2000). Delay variability at signal-
ized intersections. Transportation Research Record,
1710(1):215–221.
Intelligent Transport Systems (2010). Communications ar-
chitecture. European standard, ETSI.
Intelligent Transport Systems (2017). Basic Transport Pro-
tocol. Standard, ETSI.
Intelligent Transport Systems (2018). Decentralized Con-
gestion Control Mechanisms for ITS operating in the
5 GHz range. Technical specification, ETSI.
Intelligent Transport Systems (2019). ITS-G5 access layer
specification for its operating in the 5 GHz frequency
band. European standard, ETSI.
Jesenski, S., Stellet, J. E., Schiegg, F., and Z
¨
ollner, J. M.
(2019). Generation of scenes in intersections for the
validation of highly automated driving functions. In
IEEE Intelligent Vehicles Symposium, pages 502–509.
Krajzewicz, D., Hertkorn, G., R
¨
ossel, C., and Wagner, P.
(2002). SUMO (Simulation of Urban MObility); an
open-source traffic simulation. In Proceedings of the
4th middle East Symposium on Simulation and Mod-
elling (MESM20002).
Lehmann, B., G
¨
unther, H., and Wolf, L. (2018). A generic
approach towards maneuver coordination for auto-
mated vehicles. In 21st ITSC, pages 3333–3339.
Llatser, I., Michalke, T., Dolgov, M., Wildsch
¨
utte, F., and
Fuchs, H. (2019). Cooperative Automated Driving
Use Cases for 5G V2X Communication. In IEEE 2nd
5G World Forum, pages 120–125.
Mecklenbrauker, C. F., Molisch, A. F., Karedal, J., Tufves-
son, F., Paier, A., Bernado, L., Zemen, T., Klemp,
O., and Czink, N. (2011). Vehicular channel char-
acterization and its implications for wireless system
design and performance. Proceedings of the IEEE,
99(7):1189–1212.
Meuser, T., Bischoff, D., Richerzhagen, B., and Steinmetz,
R. (2019). Cooperative offloading in context-aware
networks: A game-theoretic approach. In Proceedings
of the 13th ACM International Conference on Dis-
tributed and Event-Based Systems, DEBS ’19, page
55–66, New York, NY, USA. Association for Com-
puting Machinery.
Milanes, V., Godoy, J., Villagra, J., and Perez, J. (2011).
Automated on-ramp merging system for congested
traffic situations. IEEE Transactions on Intelligent
Transportation Systems, 12(2):500–508.
Mir, Z. H. and Filali, F. (2018). Applications, requirements,
and design guidelines for multi-tiered vehicular net-
work architecture. In Wireless Days, pages 15–20.
Schiegg, F. A., Brahmi, N., and Llatser, I. (2019). Ana-
lytical performance evaluation of the collective per-
ception service in C-V2X Mode 4 networks. In IEEE
ITSC, pages 181–188.
Shi, W., Kong, Q., and Liu, Y. (2008). A GPS/GIS inte-
grated system for urban traffic flow analysis. In 11th
International IEEE Conference on Intelligent Trans-
portation Systems, pages 844–849.
Sommer, C., German, R., and Dressler, F. (2011). Bidi-
rectionally coupled network and road traffic simula-
tion for improved IVC analysis. IEEE Transactions
on Mobile Computing, 10(1):3–15.
Strigel, E., Meissner, D., Seeliger, F., Wilking, B., and Diet-
mayer, K. (2014). The Ko-PER intersection laserscan-
ner and video dataset. In 17th ITSC, pages 1900–1901.
Varga, A. and Hornig, R. (2008). An Overview of the OM-
NeT++ Simulation Environment. In Proceedings of
the 1st International Conference on Simulation Tools
and Techniques for Communications, Networks and
Systems & Workshops, pages 60:1–60:10.
Xu, W., Willecke, A., Wegner, M., Wolf, L., and Kapitza,
R. (2019). Autonomous maneuver coordination via
vehicular communication. In 49th Annual IEEE/IFIP
International Conference on Dependable Systems and
Networks Workshops (DSN-W), pages 70–77.
Zhao, X., Li, X., Xu, Z., and Chen, T. (2019). An optimal
game approach for heterogeneous vehicular network
selection with varying network performance. IEEE In-
telligent Transportation Systems Magazine, 11(3):80–
92.
Zheng, K., Zheng, Q., Chatzimisios, P., Xiang, W., and
Zhou, Y. (2015). Heterogeneous vehicular network-
ing: A survey on architecture, challenges, and so-
lutions. IEEE Communications Surveys Tutorials,
17(4):2377–2396.
What Cooperation Costs: Quality of Communication and Cooperation Costs for Cooperative Vehicular Maneuvering in Large-scale
Scenarios
405
