
Petri Net-based Smart Parking Information System
Omar Makke and Oleg Gusikhin
Global Data Insight And Analytics, Ford Motor Company, 22001 Michigan Ave, Dearborn, Michigan, U.S.A.
Keywords:
Smart Parking, IoT, Petri Nets, Mobility, Smart City, Digital Twin.
Abstract:
In this paper, we propose a Petri Net digital twin solution for smart parking information system to track
the occupancy of a parking space while respecting the privacy of the drivers. An edge computing device is
deployed to process camera images, and a Petri Net model is generated from the event logs and tracks the
occupancy of the parking structure. This type of solution can be enhanced to any desirable level of accuracy.
The paper provides preliminary analytics for the parking dynamics in a period of three months. This analysis
clearly demonstrates the tangible benefits of the parking information system.
1 BACKGROUND
In the of 2018, the Ford Global Data Insight and
Analytics (GDIA) team moved to the new Wagner
Place building in downtown Dearborn. Several new
retail locations operate out of the first floor of this
building. To help with the increased demand for
parking in the area, the City of Dearborn constructed
a 373-space public parking structure next to the
building. This structure, along with other nearby
public structures, provide free parking for both
Ford employees and shoppers. In addition, GDIA
employees can park at nearby Ford campus parking
spaces and use corporate shuttles to get to the Wagner
Place building.
The parking space consists of a ground parking
lot and a 4-level parking structure. As a free parking
space, there are no gates installed, and no occupancy
information is provided. Drivers usually circle around
the ground level while searching for an available
parking spot, and if none is found, the drivers usually
proceed to go through the structure. It is beneficial
to provide information on parking vacancy, especially
in the structure, to the residents of Wagner Place
to reduce the unnecessary time and fuel spent while
scanning the parking space before resorting to an
alternative parking location. The parking information
will also be very useful to other Ford employees
attending offsite meetings at Wagner Place by helping
them to decide on whether to use their personal
vehicles or to take a corporate shuttle.
To address the parking challenge, the GDIA
team decided to explore the opportunity to develop
a cost efficient IoT-based parking information
solution. Specifically, the team considered leveraging
the existing Closed Circuit Television (CCTV)
security cameras in the infrastructure which cover
the parking space, and connected vehicles for
information delivery to the parking tenants using
SmartDeviceLink (https://smartdevicelink.com/).
The team created a partnership with the City of
Dearborn and was able to process real time video
streams from the cameras to design a parking
information system at minimum cost and effort.
One of the critical requirements to utilize the video
stream is data privacy. The stream can only be
processed on the edge, and no video or images are
to be stored or accessed by the Cloud. In addition,
the system must not track license plates or other
distinguishable features of any private vehicles.
Therefore, in order to create the smart parking
information service while meeting the budget,
technical, and privacy requirements, an edge device
is setup in the infrastructure to send anonymous
disjointed messages to the digital twin in the cloud
where Petri Nets were utilized for several reasons as
will be shown in this paper.
The paper is organized as follows. The
next section explores the existing technologies
and methods used in parking information systems,
along with the proposed architecture. Section 3
discusses the Petri Net-based occupancy model and
how to implement process discovery methods and
automatically deploy parking systems. Section 4
provides the analytics and the implementation results.
Section 5 concludes the paper.
Makke, O. and Gusikhin, O.
Petri Net-based Smart Parking Information System.
DOI: 10.5220/0009583403850393
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 385-393
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
385

2 SMART PARKING
The demand for parking information systems is
rising. In large cities, people spend significant
time looking for a vacant parking spot. For
example, drivers in the United States spend about
17 hours annually looking for a parking spot, and
that number jumps to 107 hours/year in New York
City and 85 hours/year in Los Angeles (Cai et al.,
2019). This demand created an interest in the
topic which ranges from information services to
developing new sensor technologies and detection
methods as shown in (Lin et al., 2017) where
the authors classified the existing approaches along
three dimensions: information collection, system
deployment, and service dissemination.
Information collection relies on obtaining relevant
information from parking sensors or from crowd-
sensing. In (Almeida et al., 2015), the authors
categorized the sensing into 3 types: Counter-based,
sensor-based, and vision-based. The counter-based
systems use existing gate-arm counters, inductive
loop detectors and similar sensors located at the
entrances and exists. The sensor-based systems
attempt to sense if spots are vacant or occupied, and
can provide information regarding where to find a
vacant spot. In this approach, sensors are installed
at each parking space. The vision-based systems can
use either dedicated cameras configured specifically
to support the parking information system or leverage
existing surveillance cameras. The latter method
can be a cost efficient alternative, although it has a
major challenge. The existing CCTV system may
not provide full visibility to monitor the occupancy
of all parking spots especially during high occupancy
times. In most cases however, existing CCTV systems
provide sufficient coverage to identify the vehicle
movements within critical choke points in the parking
space. Tracking vehicle movements between the
parking areas and feeding the results into an adequate
model helps overcome the challenge. The solution
presented in the paper uses this type of approach.
In addition, a combination of counter-based,
sensor-based, and vision-based systems can also be
used. For example, (Seymer et al., 2019) describes a
parking system which utilizes BLE beacons to track
the vehicles inside the parking area. The authors also
used cameras located at the entrance/exit points of the
parking space to account for the potential of drivers
disabling their beacons.
2.1 Vision-based Systems
In vision-based parking systems, there are generally
two approaches to track the occupancy (Huang and
Wang, 2010). The first approach is to identify
empty/occupied spots and the second approach is
based tracking the vehicles in the parking space.
The first approach can be roughly categorized into
three major types: car-oriented methods, space-
oriented methods, and parking-lot-oriented methods
(M
`
armol and Sevillano, 2016), or a combination of
these methods. Methods using car-oriented approach
detect parked vehicles and then derive the number
of available spots. Methods using space-oriented
approach compare the appearance of the parking
place, using a static model prepared in advance,
with the current appearance of the parking space.
The vacancy is then determined by analyzing the
dissimilarity between the appearances. In parking-
lot-oriented methods, the parking lot is modeled
in a 3D program such as game engines, and the
observed image is compared to the 3D model to infer
the parking status. For example, in (Huang and
Wang, 2010), the authors proposed a probabilistic
method which considers lighting variations, shadows,
varying perspective distortion on the image, and inter-
object occlusion among parked cars. In (Sun et al.,
2018), three commercial truck parking detection
systems were evaluated, and their accuracy was
above 95%, and exceeding 99% in some cases.
However, the effect of rain and snow required
further analysis. In (M
`
armol and Sevillano, 2016),
the authors introduced QuickSpot, which is an on-
street parking spot detection system based on video
analytics. When vision-based systems are used to
to identify empty and occupied spots, the required
number of sensors and/or cameras is usually a scalar
multiple of the number of spots. For example,
one camera may be required for every 10 spots as
proposed by DeepParking team, which can be found
at https://github.com/DeepParking/DeepParking. In
some cases where the detection is performed in
an opened parking lot, it is possible to reduce the
number of required cameras by placing the cameras
strategically to obtain a bird view. However, this
is not possible in an infrastructure. In addition to
the presence of many walls and relatively low ceiling
height, vehicles can easily obscure the vision of other
vehicles behind them relative to the camera. Thus,
many cameras or sensors must be used in a parking
infrastructure to cover all the spots. In the second
approach, the main idea is to track how many vehicles
went into a specific area, and how many vehicles left
that area, and the difference between the two indicates
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
386

the number of available spots.
The technology supporting vision based systems
is rapidly evolving. The Tech industry has been
working on platforms which assist in providing
solutions for smart parking and other applications
which require image processing on the edge. For
example, NVIDIA now provides DeepStream
SDK to achieve high throughput for applications
requiring object detection, tracking, and classification
(NVIDIA, 2019). Their tracker library offers
three options: IOU tracker, Kanade-Lucas-Tomasi
(KLT) tracker, and Discriminative Correlation Filter
Tracking method. Moreover, Microsoft and NVIDIA
now provide an IoT platform for applications
which wish to use NVIDIA Jetson devices as
an edge computing device, and Azure platform
for Cloud computation. Information about this
platform can be found at https://github.com/Azure-
Samples/NVIDIA-Deepstream-Azure-IoT-Edge-
on-a-NVIDIA-Jetson-Nano. Once a vision-based
method is selected and deployed on the edge, the
critical task is to integrate the individual messages and
translate them into meaningful parking occupancy
information. The system architecture must be
agnostic to the used methods on the edge in order to
be extensible.
2.2 Proposed System Architecture
The system architecture for our solution is shown in
figure 1. An edge device is placed in the infrastructure
and connects to existing CCTV cameras. In the
future, additional sensors can be added to the
infrastructure and easily integrated with the system.
This edge device is capable of processing video
streams from several cameras and translates the data
to labels. The edge device sends the labels to a digital
twin of the parking space in the cloud. The digital
twin communicates with the information dispatcher
to provide the necessary vacancy information and
possible recommendations on where to park within
the infrastructure. The information dispatcher obtains
the necessary information and transform it for use
by the mobile application, so that the mobile
application can be designed generically, without any
knowledge of the parking infrastructure. The mobile
application displays the information it receives on
its screen, or alternatively, on the vehicle’s head
unit by implementing SmartDeviceLink SDK. This
architecture can be expanded to allow more sensors
and cameras to be used. Wireless devices and cameras
can be used as additional sensors for special parking
spots, and their bandwidth for can be optimized as
necessary (Gholamnejad Davani and Sarhan, 2017) to
cover large areas. By adding new devices additional
disjointed messages are created. The digital twin
plays a critical role to consolidate and integrate the
disjointed separate messages from the edge device.
The details behind the digital twin modeling is
discussed in the next section.
3 Petri Net MODELING
To implement digital twin, Petri Nets (PN) were
selected to represent the parking occupancy model.
Petri Nets have been proven to be a powerful
framework for design, evaluation and control of
discrete event systems (Giua and Silva, 2018). In
addition to basic PN models, there are numerous
PN modifications and extensions which are used to
incorporate diverse methods from different domains
while sharing a common modeling approach.
A Petri Net structure is a marked bipartite
graph formally defined as following (Rozenberg and
Engelfriet, 1998):
Definition 1. A Petri Net structure N is a 3-tuple N
= (P, T, F) where P = {p
1
, p
2
, ..., p
n
} is a finite set
of n places; T = {t
1
, t
2
, ..., t
m
} is a finite set of m
transitions, F ⊆ (P × T ) ∪ (T × P) is a set of arcs;
P ∩ T = φ and P ∪ T 6= φ A marking is a function
M : P → N ∪ {0} that assigns a non-negative integer
number of token to each place.
Graphically, a Petri Net is represented as the
following. Places are represented by circles and
transitions are represented by bars. Places and
transitions are connected through directed arcs, and
the tokens are represented by dots in the places. See
for example figure 2. The dynamic behavior of PN
is defined by its transition firings. Transition firings
move tokens from their input place to their output
place.
Petri Net models have wide range of applications
in the industry, specifically in applications related
to information integration and IoT-based systems.
For example, in (Gusikhin et al., 1996), the authors
demonstrate how to integrate plant floor information
for scheduling and control in real time. They used
modified Petri Nets to represent material flow, and
they tied plant floor heterogeneous messages with
transitions of a PN model. They used existing process
timing information to compensate for potential errors
in plant floor information systems. (Zhang et al.,
2018) discusses PN application to IIoT, where
Coloured Petri Nets are used to assist in managing
multiple sensors in ’Plug and Play’ manner. In
(Yang et al., 2014) Petri Nets have been applied to
automatically compose IoT software services.
Petri Net-based Smart Parking Information System
387
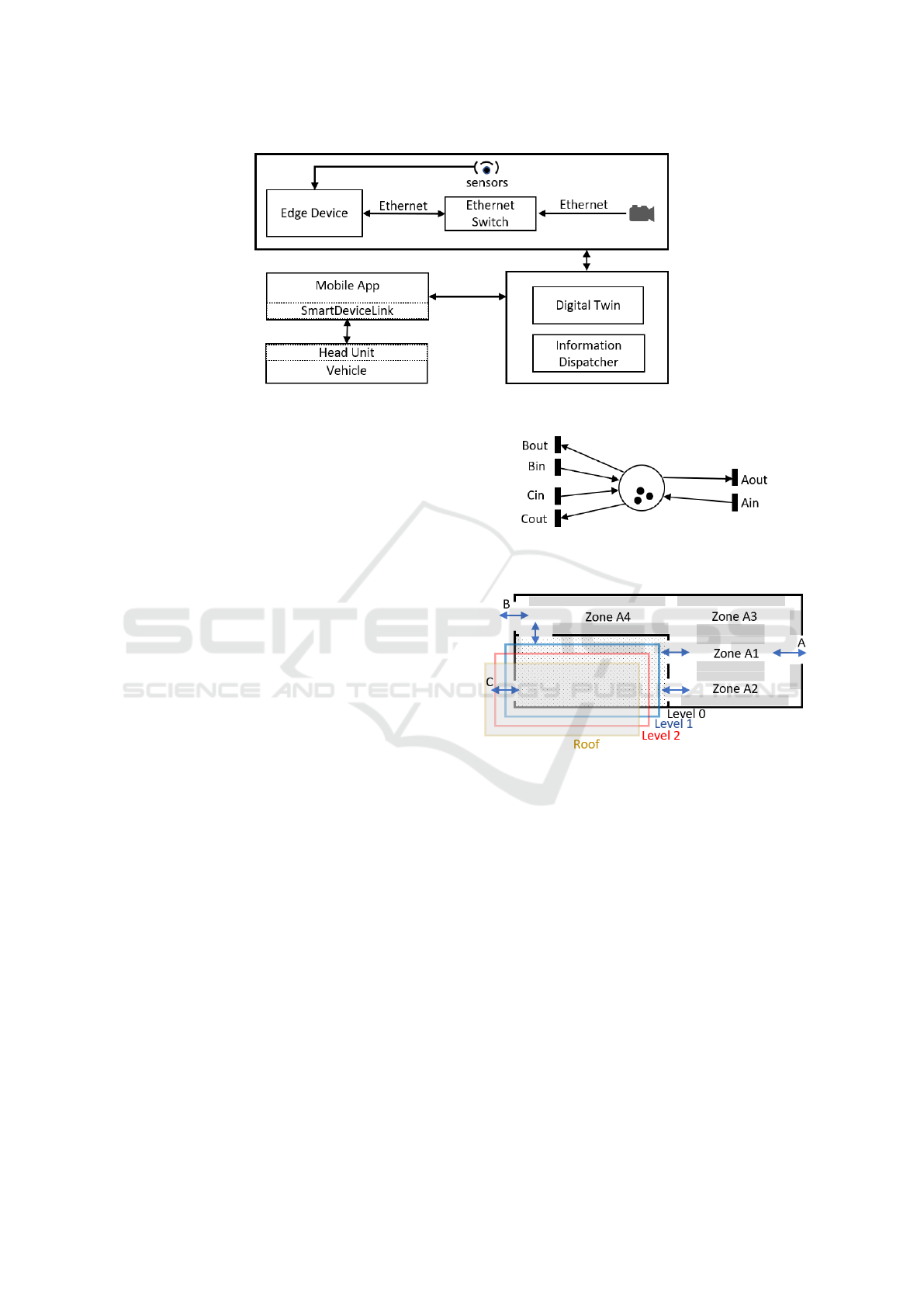
Figure 1: Smart parking system architecture.
Furthermore, among the comprehensive set of
analytical and simulation techniques PN provide for
evaluation and control of discrete event systems, PN
have developed an extensive body of research in state
estimation and process mining which can be useful
in development of IoT based tracking systems. PN
marking estimation research deals with algorithms
and methods that estimate the state of a model which
combines observable and non-observable transitions
and places to determine the optimal set of sensors to
achieve observability (Ru and Hadjicostis, 2010) (Ma
et al., 2020).
Process mining focuses on automatic construction
of PN models by analyzing the events log files (Aalst,
2016). A review of different PN-based process
discovery algorithms is provided in (Dongen et al.,
2009). Within the scope of IoT tracking applications,
automatic generation of a PN model can substantially
reduce the time for initial model development and
testing. In our work, we leverage α-algorithm
(van der Aalst and van Dongen, 2013) to construct
the initial parking model and automatically associate
IoT messages with respective transitions.
3.1 Modeling Approach
In the context of parking application, the natural
interpretations of PN is that the tokens represent
vehicles, places represent areas or individual parking
spots, and transitions represent entrances and exits of
different parking areas. For example, (Lourenco and
Gomes, 2008) uses this interpretation and describes
an interactive modeling process for a three story
parking infrastructure controller.
One of the advantages of PN is that they
support evolutionary and hierarchical development
of the model. A PN place can represent the
entire parking space, specific parking zones, or even
individual parking spots. The fidelity of the model is
Figure 2: Low fidelity model. The place represents the
entire parking structure.
Figure 3: Parking space. It consists of an open area and 4
parking levels, including roof. Grey area represents where
vehicles can park.
determined based on the available IoT infrastructure
and the application logic requirements. The practical
approach is to combine different levels of granularity
for different zones, based on the need.
We start by using a low fidelity model of the
parking infrastructure. A low fidelity PN model is
shown in figure 2. The whole parking space is lumped
into one place, and each entrance is represented by
two transitions, one for entering vehicles, and the
other for exiting vehicles. Despite the simplicity of
this model, it can provide important insights into the
dynamics of the parking space and offer a useful
parking service, as we will show later.
Normally, there are enough CCTV cameras to
cover critical choke points in the parking space. By
selecting the cameras overseeing the choke points in
the infrastructure, a medium fidelity model of the
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
388
parking structure in figure 3 is created. This PN
model is shown in figure 4. In this model, similar
to the previous model, each camera detects vehicles
transitioning from one place to another. Elaborate
models as this one would also allow a guidance
service to be provided due to its increased fidelity.
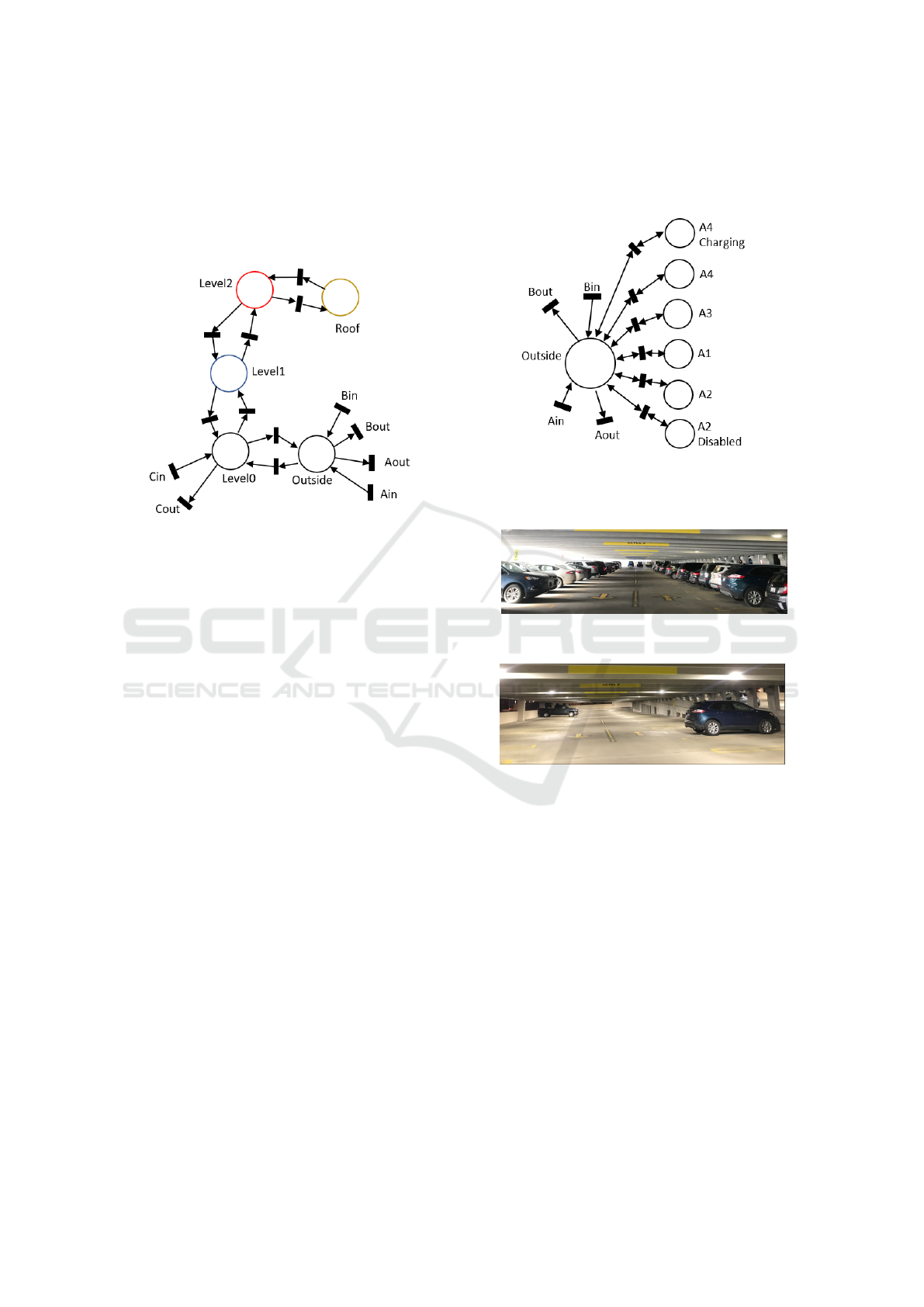
Figure 4: Medium fidelity model. The place represents
group of parking spots.
In order to provide an even more detailed model
and to identify the vacancy for charging zones
or disability zones, the PN model can be further
enhanced as shown in figure 5. The requirement for
a higher fidelity model may lead to a PN model with
some transitions and places that are not supported by
existing sensors. The class of PN that deals with
this type of models is Partially Observable Petri Nets
(POPN) that combine observable and non-observable
transitions. POPN research provides the methods
to estimate the current markings from the existing
observations (Ma et al., 2020) or attempts to find
a minimum set of sensors (or additional sensors)
required to achieve complete observability (Ru and
Hadjicostis, 2010). In lieu of using additional sensors
or cameras, existing cameras can sometimes be used
to detect vehicles transitioning between multiple
defined places by analyzing different regions in the
cameras’ field of view. Each camera can then trigger
several transitions in the PN model.
It is possible to refine the model further to detect
the vacancy of each spot individually in extreme
cases, at an added cost. We argue that this is only
required for special parking spots if the parking space
is divided into sufficiently small zones. It would be
enough to provide information and guidance to the
zone containing an empty spot unless it is a special
spot. Nevertheless, as will be discussed later, the
PN model is auto-generated, and this type of solution
offers a scalable method to provide smart parking
service regardless of the desired fidelity. Based on a
given budget, the fidelity can be selected, and over
time, new zones can be added by refining the PN
model.
Figure 5: High fidelity model for the ground level. Each
zone is assigned a place. Each special spot is assigned a
place individually.
(a) Image approximates the camera view during
peak time.
(b) Image approximates the camera view at night.
Figure 6: Peak time vs night time images.
An important aspect of the model is initialization.
The simplest way to initialize the model is to inspect
the parking lot at night when only a handful of
cars may be present, and manually input the initial
marking once. If an absolute accuracy of the tracking
sensors can be guaranteed, this initialization approach
may be sufficient. However, in practice, we must
account for the potential errors in sensor tracking,
when the cameras (or other sensors) may miscount the
number of entering or exiting vehicles. Consequently,
it is necessary to develop methods to re-initialize the
model at regular intervals (e.g. once a day). In this
case, the manual process is time consuming and error
prone, and may not be adequate. One method to
automate the recognition of the initial parking state
is using cameras to identify the open parking spots
Petri Net-based Smart Parking Information System
389
or parked vehicles. As we discussed previously,
in case of high occupancy as seen in in figure 6a,
it may be very challenging for cameras to identify
the occupied spots. At night, however, when the
parking lot is mostly empty, the identification is much
easier as shown in figure 6b. Consequently, we can
initialize the model based on the vision recognition of
the occupancy at the times when the parking mostly
empty. Alternatively, during peak hours, the parking
space gets completely filled. The indication of a
completely filled parking space can be detected by
examining the overflow vehicle movement pattern as
will be shown later in the paper.
3.2 Process Mining
In order to have a versatile and multipurpose cloud
component, it is possible to reduce the burden of
modeling the parking space by applying techniques in
process mining. For example, α-algorithm (van der
Aalst and van Dongen, 2013) is a known method
to generate a Petri Net model from event logs. To
make use of the α-algorithm, we must ensure that the
transitions are triggered in the correct temporal order,
so that no incorrect places are inserted. For example,
if a vehicle is entering the roof, and then another
vehicle enters zone A1 in figure 5, it may appear
that zone A1 can be entered from the roof level. To
remedy this problem, a simple solution would be to
track a special vehicle such as a security vehicle as
it passes through the zones, and only record these
transitions during an initial training phase. Here, we
assume that there is only one such security vehicle
present at a given time.
The method for recording the log file is as follows.
The edge device is configured to associate sensors
with REST APIs, so that whenever a sensor detects a
vehicle transitioning between places, a defined REST
API is called. This makes it easy to add new sensors
or detect more zones using existing sensors. Each
transition in the PN model is associated with a defined
REST API which the edge can call. At the initial stage
of deployment, only transitions exist and there are no
places. As the sensors trigger the REST APIs, the
order of the firing of transitions is saved in a log file
in the cloud. This log file is used to auto-generate the
PN model using the α-algorithm.
3.3 Information Service Deployment
Once the PN model is generated, it is saved as Petri
Net Modeling Language (PNML) file, defined by the
standard ISO/IEC 15909 Part 2 (PNML, 2019). This
model can then be visualized using existing modeling
tools. During the process mining phase, there may be
some transitions which never trigger. For example, a
security vehicle may never park in a charging station
spot, and hence either manual modifications to the
model will be required, or statistical analysis can be
applied to infer that an additional transition exists
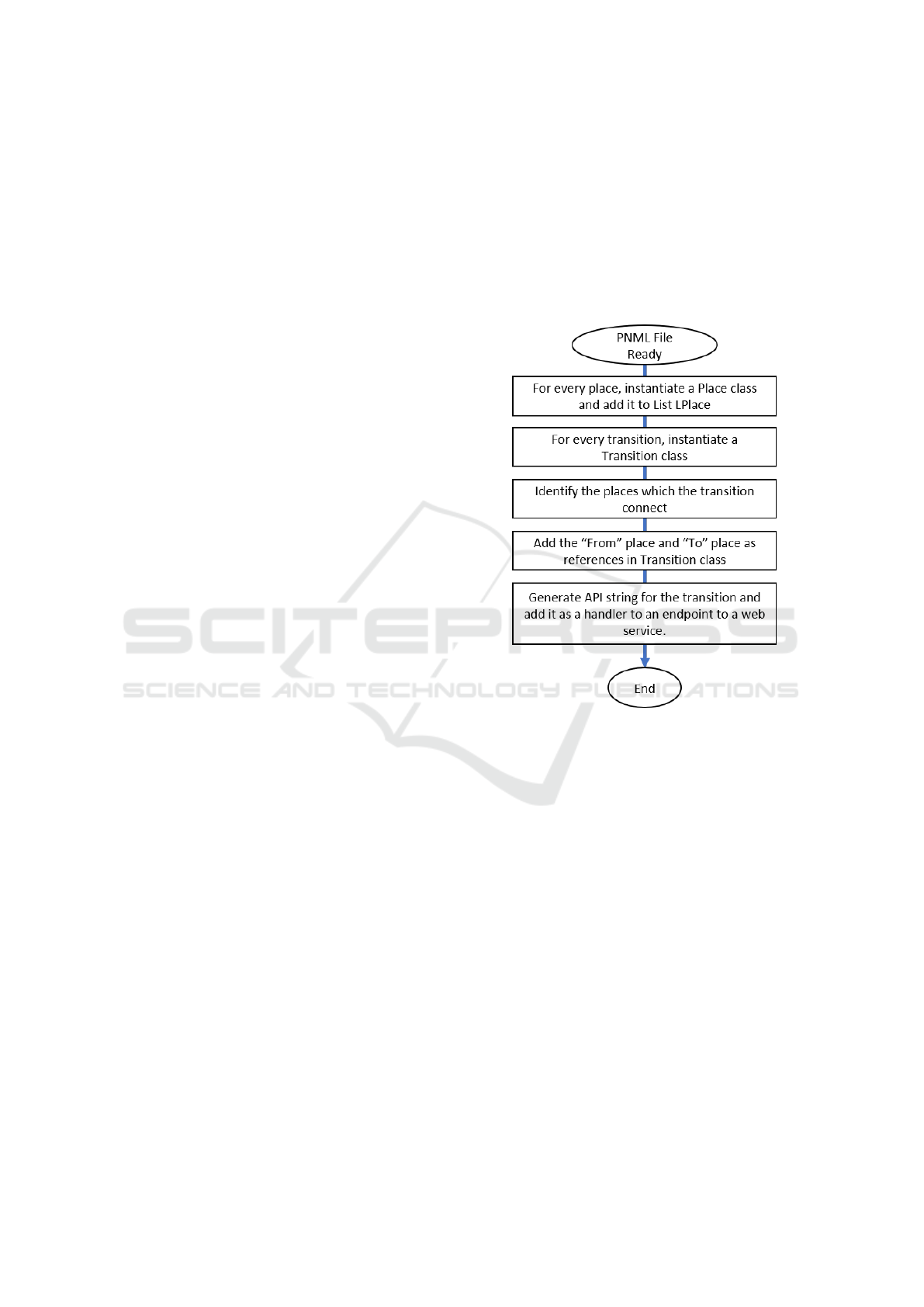
between places. Once a PNML file is ready, it does
not matter at this point how it was created. It is used
to start the digital twin as a PN model.
Figure 7: Steps to auto-generate the Petri Net model.
Each transition name in the model is extracted
from the PNML description, and a REST endpoint is
automatically created in the cloud, which is derived
from the extracted transition name. A graph structure
is created based on the PNML. In this graph, places
and transitions are implemented as classes, where
the transition class is also the handler for the REST
endpoints. By using REST APIs, only parameters
related to security would be required, which keeps
the model lightweight. Many commercial software
products, however, are rigid for this approach, and the
endpoints must be defined by this software. For these
systems, only one REST endpoint is defined, and a
JSON payload is used, containing information about
the trigger which fired, and any other security related
parameters. In this case, a dispatcher which handles
all the transitions analyses the payload and triggers
the correct transition. However, in our approach,
there is no need for any commercial software, and the
service runs with minimal requirements in the cloud.
This reduces the deployment costs by eliminating
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
390
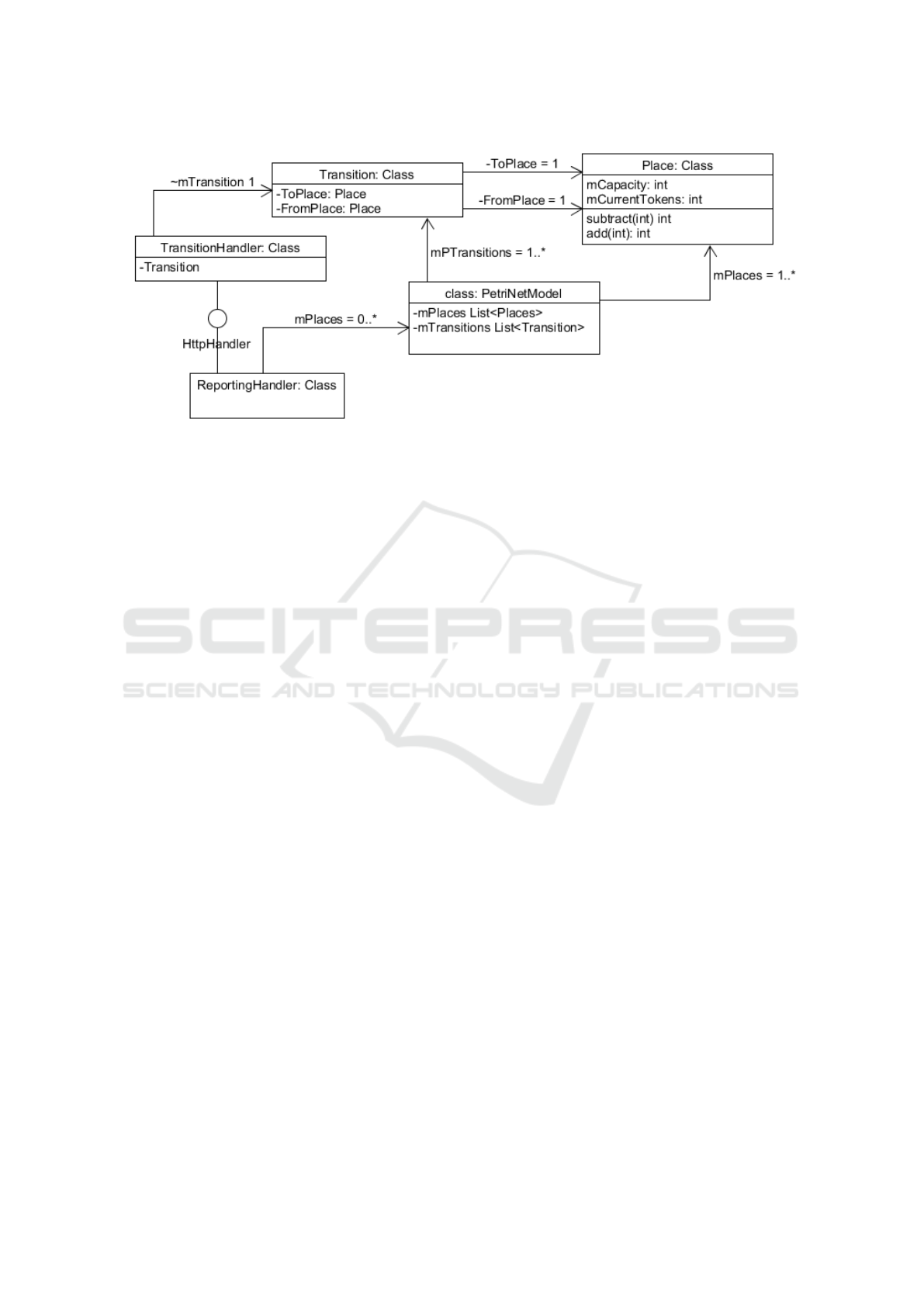
Figure 8: Simplified architecture of the web service.
licensing costs and reducing the hardware and storage
space requirements in the cloud. The generation
of the Petri Net model is shown in figure 7. The
architecture of the cloud service is shown in figure
8. There are two classes which interact with the web
service: IoT devices, and the user device, such as a
mobile phone, which reports the total available spots
in each place.
4 RESULTS
4.1 Analytics
We captured data over a period of three months.
To highlight our results, we provide analysis for the
parking structure, starting from the second level and
up. From our experiments, we found that it takes a
vehicle at least 2.5 minutes (average 3 minutes) to
drive from the entry point of level-1 all the way to the
roof, turn, and drive and back to the same entry point
of level-1. By lumping all the places above ground
level into one place, we gain insight into the activity
within the parking structure. We chose an arbitrary
Wednesday in January, after the businesses at Wagner
Place opened, and compare that Wednesday with the
3 month average of Wednesdays, where for the most
part, these businesses were closed.
Figure 9 shows our analysis. We define the
occupancy curve as the minimum between capacity
(270) and the number of both parked and moving
vehicles in a place at a given time of the day. We
define the “Overflow” curve as the maximum between
the capacity (270) and the number of parked and
moving vehicles. The curve “3M Average” shows the
3 months average occupancy curve of the structure
above ground level. This average never exceeded
capacity, and hence there was no overflow. However,
for the chosen Wednesday in January, it can be seen
that the occupancy has reached capacity, and there
was overflow during the day.
It is also possible to infer when the parking
structure reaches maximum capacity without
knowing the initial marking by analyzing the vehicles
entering and leaving the structure. Whenever the
signal representing entering vehicles is similar to a 3
minutes lagged signal representing exiting vehicles,
and when the volume of vehicles is not close to
0, we infer that capacity is reached. The curve
“Overflow Inferred” drops whenever it is inferred that
maximum capacity has been reached. The absolute
value of this line is not important, and is shown
for demonstration. Using this type of detection,
variations in the capacity due to construction, or due
to vehicles parked incorrectly, can be accounted for,
although at a delayed time.
We calculated that on this given day, around 10.75
hours were wasted trying to find a parking spot.
Furthermore, for every liter of gas consumed, around
2.3 Kg of CO
2
is produced, and each 10 minutes
of idling costs 300 milliliters in wasted fuel for 3
liter engines (NRCan, 2019)(NRCan, 2015). Thus
we estimate that the overflow on the selected day
contributes to 44.5kg of CO
2
from around 5 gallons
of gasoline.
4.2 Information Dissemination
Once the model is generated, the information has
to be delivered to the users. SmartDeviceLink has
been shown to be an effective solution for connected
car features and mobility applications (Yeung et al.,
2017). Moreover, it has been shown that it is possible
Petri Net-based Smart Parking Information System
391
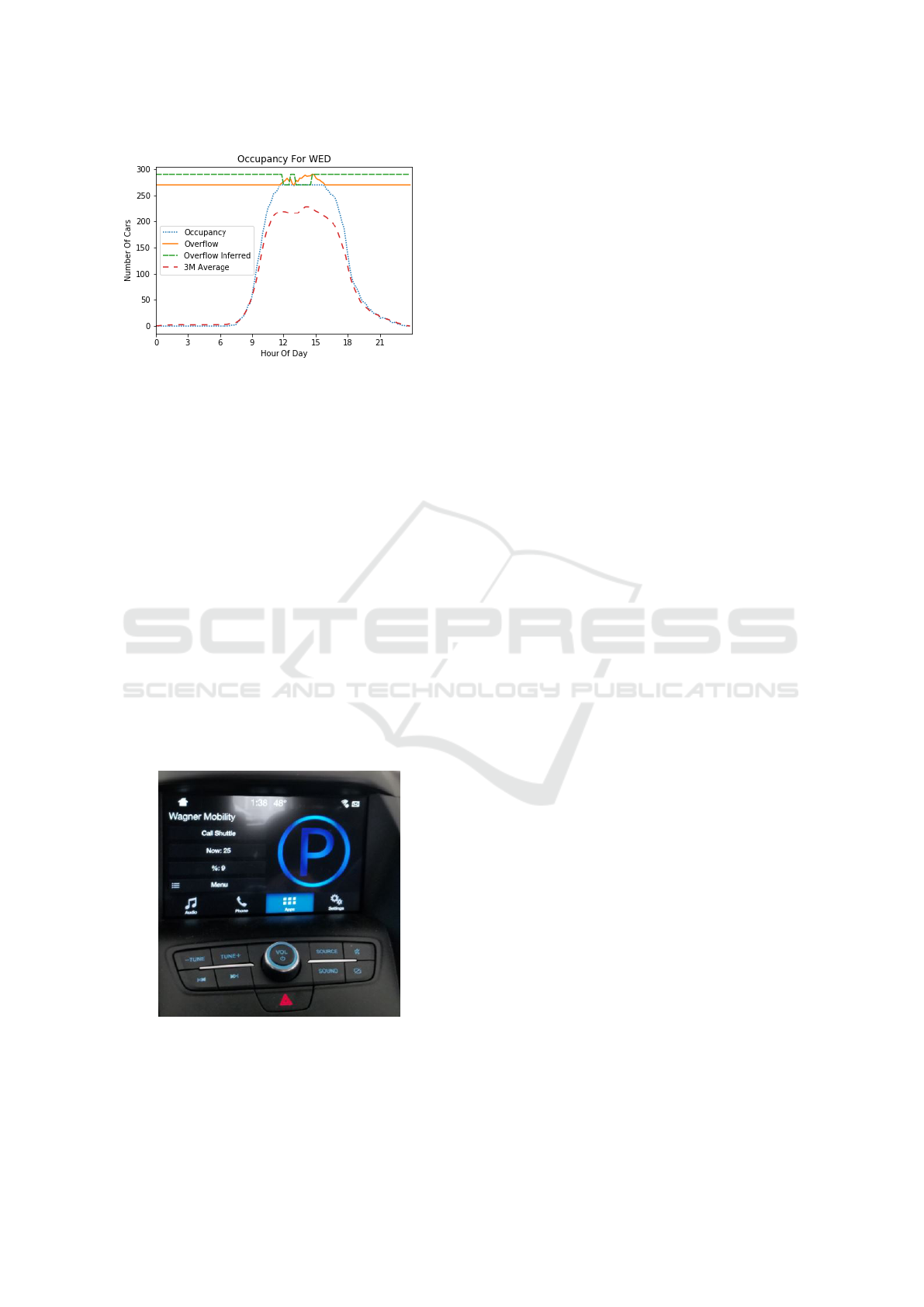
Figure 9: Analysis of activity on a given day.
to create dynamic vehicle applications by relying on
SmartDeviceLink (Gusikhin et al., 2018) to integrate
the application with the vehicle’s head unit. Using
similar principles for our smart parking solution,
the mobile application implements SmartDeviceLink,
and it communicates with the ReportingHandler in
figure 8, which has access to the places in the Petri
Net. The ReportingHandler creates a list containing
the vacancy in each zone and sends it to the mobile
application. The mobile application then presents the
information to the users either on the mobile phone,
or seamlessly in the vehicle on the head unit as shown
in figure 10. If the model changes in the cloud,
the mobile application dynamically changes its user
interface, and hence reducing the development time.
For instance, the current implementation shows the
vacancy in the infrastructure as one place. If more
places are desired, the cloud can easily send a table to
the mobile app, which can simply update the display
list to include multiple rows.
Figure 10: Integration of mobile application with vehicle
using SmartDeviceLink.
5 CONCLUSIONS
The paper presents a case study of a cost efficient
smart parking information system developed for free
public parking space. The development leverages the
existing CCTV infrastructure with vision processing
on an edge device to ensure data privacy. The
cloud backend implements Petri Net-based digital
twin to closely track current parking occupancy.
The information regarding the parking availability is
delivered to the driver’s mobile app and is seamlessly
integrated with the vehicle’s infotainment unit using
SmartDeviceLink.
This approach has several benefits. A Petri
Net model provides an efficient and effective
mechanism to integrate disjointed IoT messages into
coherent parking occupancy information. Petri Net
graphical formalism allows for clear and concise
representation of parking dynamics linked with
individual sensors. Petri Nets supports modeling at
the different levels of fidelity and thus the model can
be designed to meet current budget and technological
constrains with provision for future extensions. In
addition, we demonstrated how we can leverage
PN process discovery algorithms to automatically
generate the model and thus reduce the development
and debugging efforts. Petri Nets allow us to abstract
the development from the specific application or even
domain area. The same platform can be used for
arbitrary parking spaces, or for any other systems
which require tracking, such as inventory tracking.
We also presented and discussed the analytics
of parking dynamics over the course of 3 months.
The analytics clearly show that in the absence of
parking information system there is measurable waste
produced from the vehicles overflowing in a full
parking structure. Our results demonstrate that even
a simple parking information billboard indicating
whether parking structure is full or not may save
cumulatively over 10 hours of time wasted and around
5 gallons of gasoline on a busy day. These results
can be used by cities as a template for business
justifications to invest in parking information system
infrastructure.
The next development steps include extending
PN model to more detailed and granular parking
representation and extension of the services to include
guidance to the available parking spot delivered
through the mobile app. This work requires
estimation of vehicle’s position within parking
structure based on vehicle sensors, such as GPS,
accelerometer, speed, and steering angle. Based on
this estimation, the digital twin can determine the
best route to get to the available spot. One of the
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
392

key challenges for guiding a vehicle to an available
parking spot, in the presence of multiple vehicles,
is projecting which parking spot will be available
simultaneously while providing the guidance to that
spot. One of the additional advantages of using PN
is that PN formalism offers analytics and simulation
techniques to efficiently deal with these types of
problems. Additionally, when a guidance service is
available, the digital twin may communicate directly
with connected vehicles in order to support the
coordination of autonomous valley parking.
REFERENCES
Aalst, W. V. D. (2016). Process Mining. Springer.
Almeida, P., Soares de Oliveira, L., Jr, A., Jr, E., and
Koerich, A. (2015). Pklot - a robust dataset for parking
lot classification. Expert Systems with Applications,
42.
Cai, B. Y., Alvarez, R., Sit, M., Duarte, F., and Ratti,
C. (2019). Deep learning-based video system for
accurate and real-time parking measurement. IEEE
Internet of Things Journal, 6(5):7693–7701.
Dongen, van, B., Alves De Medeiros, A., Wen, L.,
Jensen, K., and Aalst, van der, W. (2009). Process
mining: overview and outlook of Petri net discovery
algorithms, page 225–242. Springer.
Gholamnejad Davani, S. and Sarhan, N. J. (2017).
Experimental analysis of bandwidth allocation in
automated video surveillance systems. In Proceedings
of the 25th ACM International Conference on
Multimedia, MM ’17, page 1457–1464, New York,
NY, USA. Association for Computing Machinery.
Giua, A. and Silva, M. (2018). Petri nets and automatic
control: A historical perspective. Annual Reviews in
Control, 45:223–239.
Gusikhin, O., Lewis, D., and Miteff, J. (1996). Integration
of plant floor information for scheduling and control.
SAE Techical Paper Series.
Gusikhin, O., Shah, A., Makke, O., Smirnov, A., and
Shilov, N. (2018). Dynamic cloud-based vehicle
apps - information logistics in disaster response. In
VEHITS, pages 626–635.
Huang, C. and Wang, S. (2010). A hierarchical
bayesian generation framework for vacant parking
space detection. IEEE Transactions on Circuits and
Systems for Video Technology, 20(12):1770–1785.
Lin, T., Rivano, H., and Le Mou
¨
el, F. (2017). A
survey of smart parking solutions. IEEE Transactions
on Intelligent Transportation Systems, 18(12):3229–
3253.
Lourenco, J. and Gomes, L. (2008). Animated graphical
user interface generator framework for input-output
place-transition petri net models. In van Hee, K. M.
and Valk, R., editors, Applications and Theory of Petri
Nets, pages 409–418, Berlin, Heidelberg. Springer
Berlin Heidelberg.
Ma, Z., Li, Z., and Giua, A. (2020). Marking estimation in
a class of time labelled petri nets. IEEE Transactions
on Automatic Control, 65(2):493–506.
M
`
armol, E. and Sevillano, X. (2016). Quickspot: a
video analytics solution for on-street vacant parking
spot detection. Multimedia Tools and Applications,
75(24):17711–17743.
NRCan (2015). 2019 fuel consumption guide. https:
//www.nrcan.gc.ca/energy/efficiency/communities-
infrastructure/transportation/idling/4459 Accessed.
2019-12-15.
NRCan (2019). 2019 fuel consumption guide.
https://www.nrcan.gc.ca/sites/www.nrcan.gc.
ca/files/oee/pdf/transportation/tools/fuelratings/
2019FuelConsumptionGuide.pdf Accessed. 2019-12-
15.
NVIDIA (2019). Nvidia deepstream. https://developer.
nvidia.com/deepstream-sdk Accessed. 2019-12-15.
PNML (2019). Petri net modeling language. http://www.
pnml.org/ Accessed. 2019-12-15.
Rozenberg, G. and Engelfriet, J. (1998). Elementary net
systems, pages 12–121. Springer Berlin Heidelberg,
Berlin, Heidelberg.
Ru, Y. and Hadjicostis, C. N. (8/2010). Sensor selection
for structural observability in discrete event systems
modeled by petri nets. IEEE Transactions on
Automatic Control, 55(8):1751–1764.
Seymer, P., Wijesekera, D., and Kan, C.-D. (2019). Smart
parking zones using dual mode routed bluetooth
fogged meshes. In VEHITS, pages 211–222.
Sun, W., Stoop, E., and Washburn, S. S. (2018). Evaluation
of commercial truck parking detection for rest areas.
Transportation Research Record, 2672(9):141–151.
van der Aalst, W. M. P. and van Dongen, B. F. (2013).
Discovering petri nets from event logs. In Jensen,
K., van der Aalst, W. M. P., Balbo, G., Koutny, M.,
and Wolf, K., editors, Transactions on Petri Nets and
Other Models of Concurrency VII, pages 372–422,
Berlin, Heidelberg. Springer Berlin Heidelberg.
Yang, R., Li, B., and Cheng, C. (2014). A petri net-based
approach to service composition and monitoring in
the iot. In 2014 Asia-Pacific Services Computing
Conference, pages 16–22.
Yeung, J., Makke, O., Macneille, P., and Gusikhin, O.
(2017). Smartdevicelink as an open innovation
platform for connected car features and mobility
applications. SAE International Journal of Passenger
Cars - Electronic and Electrical Systems, 10.
Zhang, Y., Wang, W., Du, W., Qian, C., and Yang,
H. (2018). Coloured petri net-based active sensing
system of real-time and multi-source manufacturing
information for smart factory. The International
Journal of Advanced Manufacturing Technology,
94(9):3427–3439.
Petri Net-based Smart Parking Information System
393
