
Constraints and Challenges in Designing Applications for Industry 4.0:
A Functional Approach
Mateus Coelho Silva
a
, Frederico Luiz Martins de Sousa
b
, D
´
ebora Lage Moreira Barbosa
c
and Ricardo Augusto Rabelo Oliveira
d
Departamento de Computac¸
˜
ao, Instituto de Ci
ˆ
encias Exatas e Biol
´
ogicas, Universidade Federal de Ouro Preto,
Rua Diogo Vasconcelos - 128 - Bauxita, 35400-000, Ouro Preto, MG, Brazil
Keywords:
Industry 4.0, IoT, Machine-to-Machine Communication, Sensor Fusion.
Abstract:
The Industry 4.0 concept relies on the integration of its composing elements using modern tools. These mod-
ern industrial plants must consider concepts like the Internet of Things, Cyber-Physical Systems and Smart
Devices. The main features involved in these architectures are the local control, machine-to-machine infor-
mation exchange, and human-to-machine interface through virtualization. The integration of these elements
to create a connected environment presents a challenge to developers and engineers. In this text, we perform
a theoretical analysis of the main constraints and challenges in designing and implementing novel applica-
tions using digital twins, robots, wearable devices, and other control interfaces. To evaluate the theoretical
approach, we performed a series of tests in prototype environments.
1 INTRODUCTION
Industrial environments are evolving to Cyber-
Physical Production Systems (CPPS) through the
concepts of Industry 4.0 and the Internet of Things
(IoT) (Vogel-Heuser and Hess, 2016). Applications in
this context allow researchers to do engineering steps
towards the comprehension of the concepts related to
this topic (Zezulka et al., 2016). This kind of envi-
ronment bases on network connections, decentraliza-
tion and virtualization, allowing the human-machine
interaction, as well as machine-to-machine communi-
cation (Brettel et al., 2014).
Robots and Smart Actuators have an extensive
role in Industry 4.0, as instruments to automate mul-
tiple industrial processes. They are tools that offer
safety, flexibility and the possibility of collaboration
with other devices in modern environments (Bahrin
et al., 2016). Thus, they are not only a replacement
for humans performing repetitive tasks but also col-
laborative components linked by smart sensors and
human-to-machine interfaces.
Many times, industrial processes present hazards
a
https://orcid.org/0000-0003-3717-1906
b
https://orcid.org/0000-0002-8522-6345
c
https://orcid.org/0000-0002-8119-4964
d
https://orcid.org/0000-0001-5167-1523
to the involved workers (Saleh and Cummings, 2011;
Shaikh et al., 2018). Within this topic, the prospect
of operating and controlling industrial processes away
from their hazards is a possible solution for this mat-
ter. Therefore, another important topic is human inter-
action through data virtualization and digitalization.
All this interaction requires a network-based en-
vironment in which the devices can communicate
with each other and generate insights and decisions.
Thus, this integration uses the paradigm of the Inter-
net of Things (IoT) as a basis for the development of
novel applications. The IoT is a modern paradigm in
which devices communicate through network connec-
tions, especially using wireless technologies (Hozdi
´
c,
2015).
As mentioned, multiple connections compose an
Industry 4.0 application environment. Furthermore,
the virtualization aspect is relevant to create this kind
of system. Also, the integration of elements such as
robots and smart sensors have a significant role in
industrial applications. Finally, this appliance must
have elements that allow machine-to-machine com-
munication and human-to-machine interfaces.
Although there is a comprehension from the im-
portance of Industry 4.0 and its elements, the liter-
ature lacks discussions of functional constraints for
designing such applications. Furthermore, the litera-
ture lacks on works that test these constraints in pro-
Silva, M., Martins de Sousa, F., Barbosa, D. and Oliveira, R.
Constraints and Challenges in Designing Applications for Industry 4.0: A Functional Approach.
DOI: 10.5220/0009570307670774
In Proceedings of the 22nd International Conference on Enterprise Information Systems (ICEIS 2020) - Volume 1, pages 767-774
ISBN: 978-989-758-423-7
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
767

totype environments. Thus, in this work, we provide
both a theoretical and practical analysis of the main
constraints and challenges of developing applications
based on elements of Industry 4.0. As these are the
minimal conditions for the design of appliances, it
configures this as a functional approach. Hence, the
main objective of this work is:
• Establish the theoretical main functional con-
straints and challenges in the development of In-
dustry 4.0 applications and test them in controlled
prototype environments;
At first, we organize and understand what are the main
constraints in the design of Industry 4.0 applications
through a theoretical approach, discussed in Section
2. We analyze the elements which compose these
systems, as well as their single constraints and in-
tegration challenges. Furthermore, we created pro-
totype environments in which we test some of these
constraints to create model applications and perform
tests, presented in Section 3. Finally, we discussed
the results in Section 4.
2 THEORETICAL ANALYSIS
In this section, we introduce the theoretical view of
the aspects covered in this work. Our objective here is
to establish the main functional constraints and chal-
lenges concerning the design of novel applications for
Industry 4.0 from a theoretical approach. Our further
tests will validate the restrictions gathered in this sur-
vey.
2.1 Industry 4.0 and the IoT
Lasi et al. (Lasi et al., 2014) present the most mod-
ern industrial paradigm as the fourth industrial revo-
lution, henceforth called “Industry 4.0”. In this new
paradigm, industrial plants will require decentralized,
modular and efficient manufacturing units. Saldivar
et al. (Saldivar et al., 2015) presents some of the main
design principles regarding Industry 4.0:
• Interoperability;
• Virtualization;
• Decentralization;
• Real-Time Capability;
• Service Orientation;
• Modularity;
There are some key concepts and technologies to en-
hance the functioning of these systems, such as Big
Data, Machine Learning, and IoT. According to At-
zori et al. (Atzori et al., 2010), the Internet of Things
(IoT) is a novel paradigm in modern telecommuni-
cation. The main techniques to enhance communi-
cation between devices are wireless network proto-
cols. Taneja and Davy (Taneja and Davy, 2017) en-
force that a typical IoT application bears several mod-
ules running together. Beyond smartphones, tablets
and personal computers, novel computer-based de-
vices can also compose these networks. Some exam-
ples of IoT devices are:
• Robots (Ashokkumar and Thirumurugan, 2018);
• Gloves (K
¨
oseoglu et al., 2018; Farahani et al.,
2018);
• Helmets (Roja and Srihari, 2018);
• Smart Sensors and Cameras (Iba
˜
nez et al., 2018;
Jang et al., 2018);
Each module can combine in multiple ways to build
and integrate several IoT appliances. This feature is
enforced by the modularity of the device network, as
stated previously.
2.2 Constraints and Requirements for
Industry 4.0 Applications
The works found in the literature do not present a for-
mal approach to the basic functional constraints and
requirements for the Industry 4.0 application design
process. Thus, in this section, we create a theoreti-
cal basis for the main restraints for designing novel
solutions.
Initially, we look at the constraints from the
ground theoretical perceptions from Industry 4.0. As
presented previously, the main concepts around this
topic are the Cyber-Physical Systems (CPS) (Vogel-
Heuser and Hess, 2016) and the Internet of Things
(IoT) (Hozdi
´
c, 2015). Therefore, we formalize the
constraints combining three main sources: The main
restraints of CPS, the main requirements from the IoT
and the Industry 4.0 design principles (Saldivar et al.,
2015).
At first, we evaluate the Cyber-Physical Systems.
Abad et al. (Abad et al., 2016) enforce that these
systems must remain fully operational throughout the
task execution time. This constraint creates a need
for software safety protocols to observe soft and hard
real-time requirements. Furthermore, this requires
hardware robustness and reliability, which is a basic
embedded systems constraint (Hansen, 2017). These
restraints represent a reliability aspect in the produced
data, which is hardware- and software-dependant. Xie
et al. (Xie et al., 2018) reinforce the reliability as a
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
768
constraint for CPSs, and its direct relation with real-
time requirements.
Also, we analyze the Internet of Things’ main
constraints. Samie et al. (Samie et al., 2016) en-
force that the Internet of Things goal is the ubiquity
of network-based decentralized devices. As much as
information is the most important value, the network
communication capability is the main constraint in
developing IoT applications (Gravalos et al., 2018).
Tuyishmere et al. (Tuyishimire et al., 2016) state that
Wireless Sensor Networks are the main theoretical
base for IoT applications. From these applications,
we learn that these networking constraints affect the
data reliability.
Therefore, we present two main issues as the most
important constraints in the design of Industry 4.0 ap-
plications:
• Software and Hardware Reliability. As a CPS,
the application must present reliable hardware and
software elements to provide the environment to
develop the proposal;
• Networking and Communication. As an IoT ap-
plication, the devices must provide services with
minimal quality restraints to enable fully opera-
tional applications in the context of Industry 4.0
with data reliability.
From the design principles presented by Saldivar et al.
(Saldivar et al., 2015), the reliability constraint from
the CPS analysis serves mostly the interoperability,
real-time capability, and modularity of the proposed
application. The networking constraint affects, for the
most part, the interoperability, virtualization, decen-
tralization and service orientation aspects.
3 PROTOTYPE ENVIRONMENTS
In the previous section, we introduced the main
constraints, challenges, and elements employed in
the creation of advanced network-integrated environ-
ments based on the IoT and CPS concepts. In this
section, we present prototype environments based on
Industry 4.0, created to experiment and validate the
gathered information.
As stated, Industry 4.0 applications have two main
constraints: Software and Hardware Reliability and
Networking and Communication. Through this con-
jecture, we created two different environmental tests
to validate both these constraints.
3.1 First Environment - Digital Twin
Wearable-based Teleoperation
The first prototype environment evaluates the Hard-
ware and Software reliability aspect. In our proposed
appliance, we use a digital twin virtual environment
and tactile feedback from a data glove as Human-
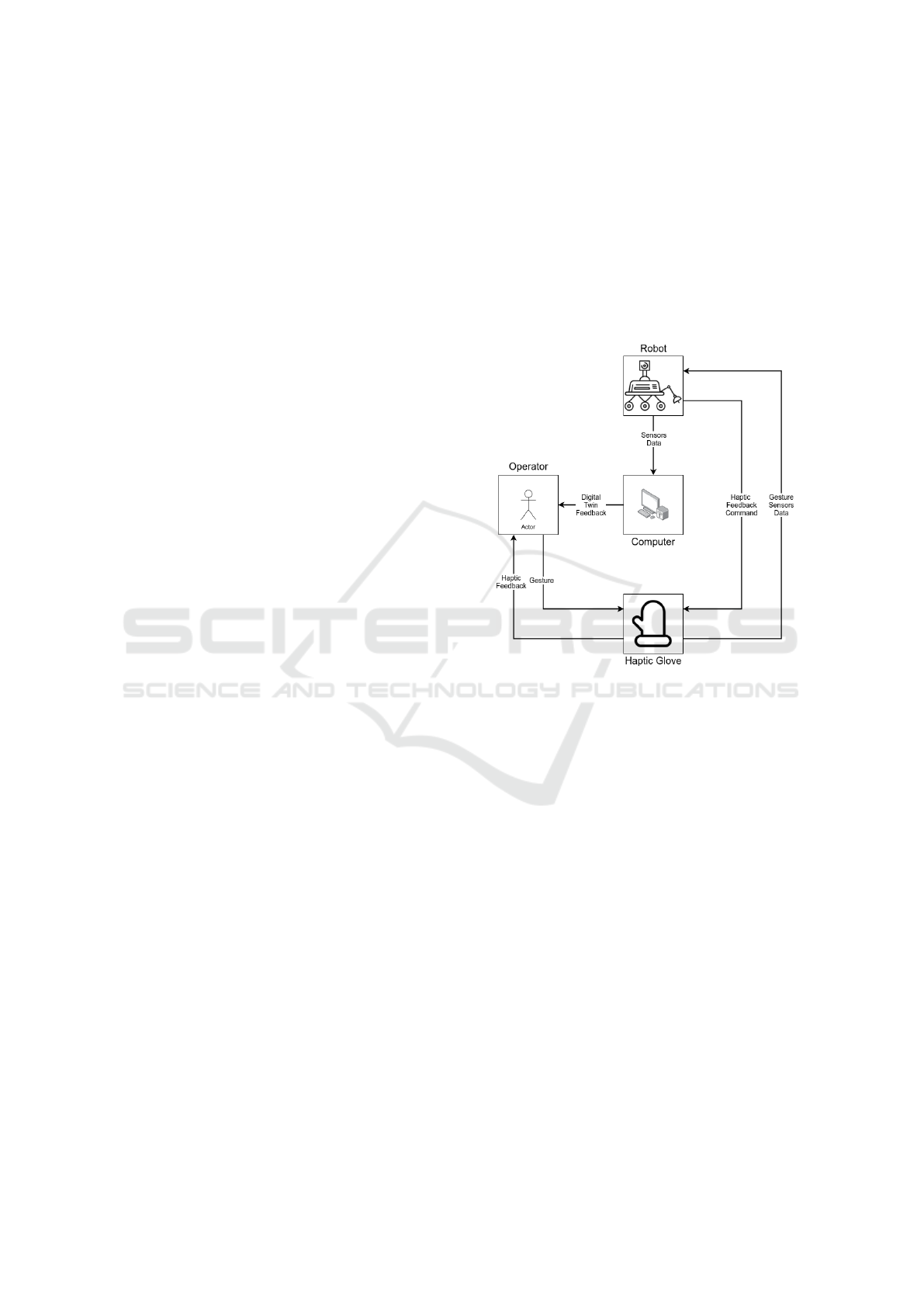
Robot Communication interfaces. Figure 1 displays
the proposed environmental architecture.
Figure 1: IoT-based operation environment architecture.
As stated before, the operator receives information
from the robot through the digital twin application
and the tactile feedback from the glove. He uses the
haptic glove as a communication interface with the
system. The glove embedded computer node actively
sends the gesture sensors information to the robot for
interpretation and acting. It produces haptic feedback
using an embedded vibration motor.
In this appliance, the robot receives the fingers
data and turns it into a hand signal command. There
are three main basic hand signs. If the user keeps his
hand open, the robot should stay stopped. If the hand
is closed, the robot should travel forwards at a con-
trolled speed. Finally, there’s another special sign to
make the robot travel backward, with only the two
first fingers open. Figure 2 displays these hand signs.
The robot receives the information from the glove,
interprets the gesture and acts accordingly, sending
the position encoders and obstacle detection sensors
data to the digital twin application. In case the robot
detects an obstacle, it sends a signal to the digital twin
application and the haptic glove to generate a feed-
back response. Finally, the computer application tries
Constraints and Challenges in Designing Applications for Industry 4.0: A Functional Approach
769
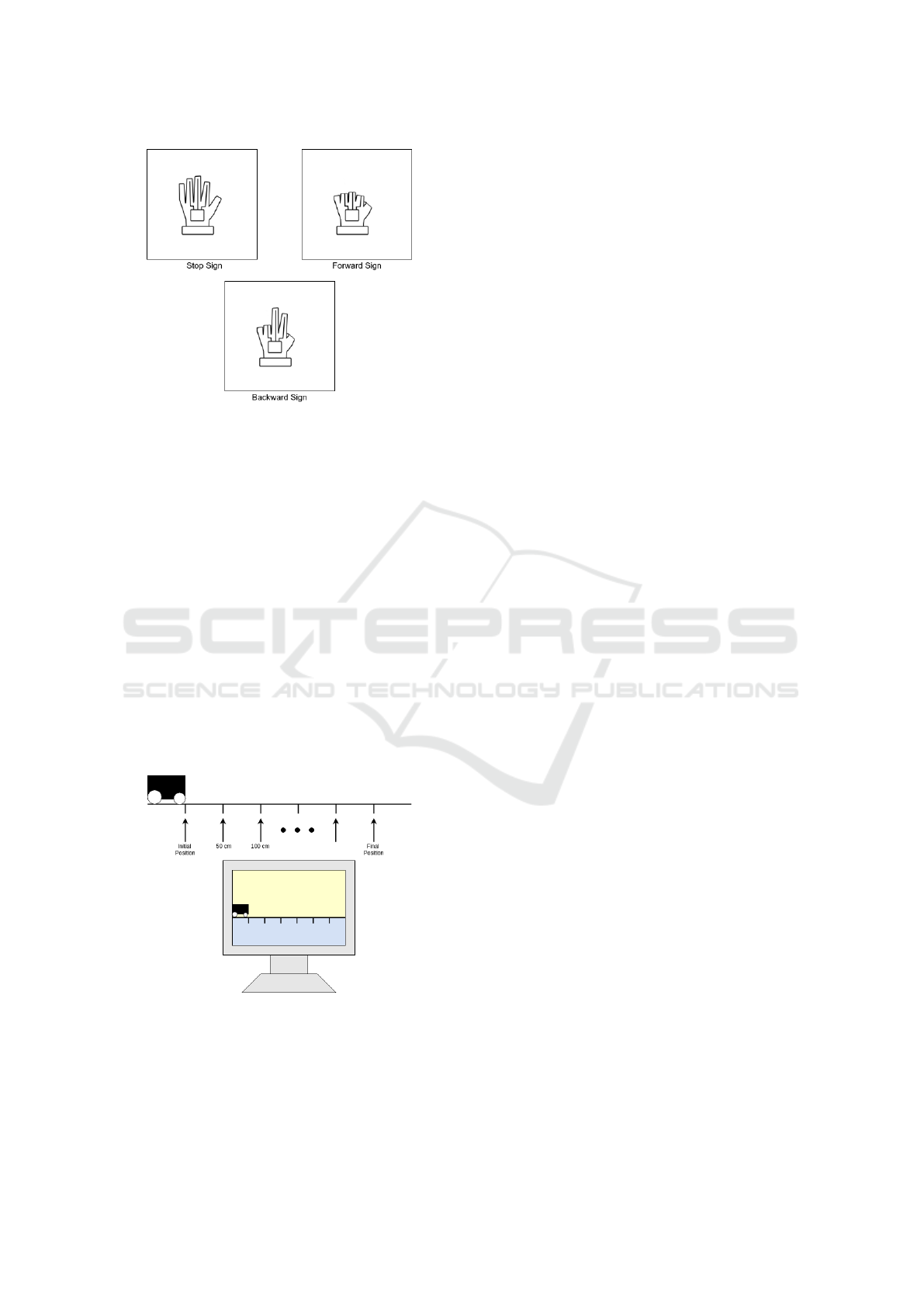
Figure 2: Robot Control Hand Signs.
to reproduce the robot condition from its transmitted
sensor data.
The communication means used by these proto-
types is a Wireless Local Area Network. The applica-
tions running on each device send and receive data us-
ing UDP protocols to avoid delays in the data stream.
3.1.1 Validation Test
In order to test and validate the proposed architecture
using the presented prototypes, we arranged a setting
containing elements to examine the system proposed
features. With this environment, we tested the preci-
sion of the digital twin.
For the digital twin validation, we proposed a test
to compare the longitudinal distance from the robot
against the reproduction in the virtual environment.
Figure 3 illustrates the test set.
Figure 3: Digital Twin Validation Test Illustration.
To evaluate the reproduction of the digital twin envi-
ronment, we obtained values of real distances and the
correspondent value on the digital twin environment
for various measures. In an ideal circumstance, the
regression function obtained from these points should
approximate from a function as the represented on
equation 1, where d
vi
(d
r
) is the ideal value of the
robot position in the virtual representation as a func-
tion of the actual real position value d
r
.
d
vi
(d
r
) = d
r
(1)
From the point cloud obtained from the tests, we ap-
plied a linear regression model to represent the same
function with the actual obtained values. This func-
tion is represented in equation 2, where d
v
(d
r
) is the
value obtained from the linear regression of the scat-
ter plot, represented as a function of the real position
value d
r
.
d
v
(d
r
) = α.d
r
+ β (2)
Where α and β are the regression parameters. The
next step is to evaluate the quality of this function.
Thus, we represent the error function between the
ideal and the obtained functions. This E(d
r
) function
is represented in the equation 3.
E(d
r
) = d
v
(d
r
) − d
vi
(d
r
)
E(d
r
) = α.d
r
+ β − d
r
E(d
r
) = (α − 1).d
r
+ β
(3)
In this equation, the term α − 1 represents the angu-
lar coefficient error, which represents how good is the
position measurement. Also, the angular coefficient
error indicates the percentage error of the representa-
tion when the offset is corrected. The β term repre-
sents the offset error, which is a calibration term.
3.2 First Environment - Validation Test
Results
In this test, we needed to obtain the data that will cor-
relate the distances of the digital twin and the real dis-
tances. Therefore, we manually measured the robot’s
traveled distance and compared it to the value ob-
tained using the embedded encoder sensor.
We have measured these values 40 times, using
distances from 50 to 200 cm. From this data, we ap-
plied the method described in Section 3.1.1 to obtain
the α − 1 and beta values that represent the quality
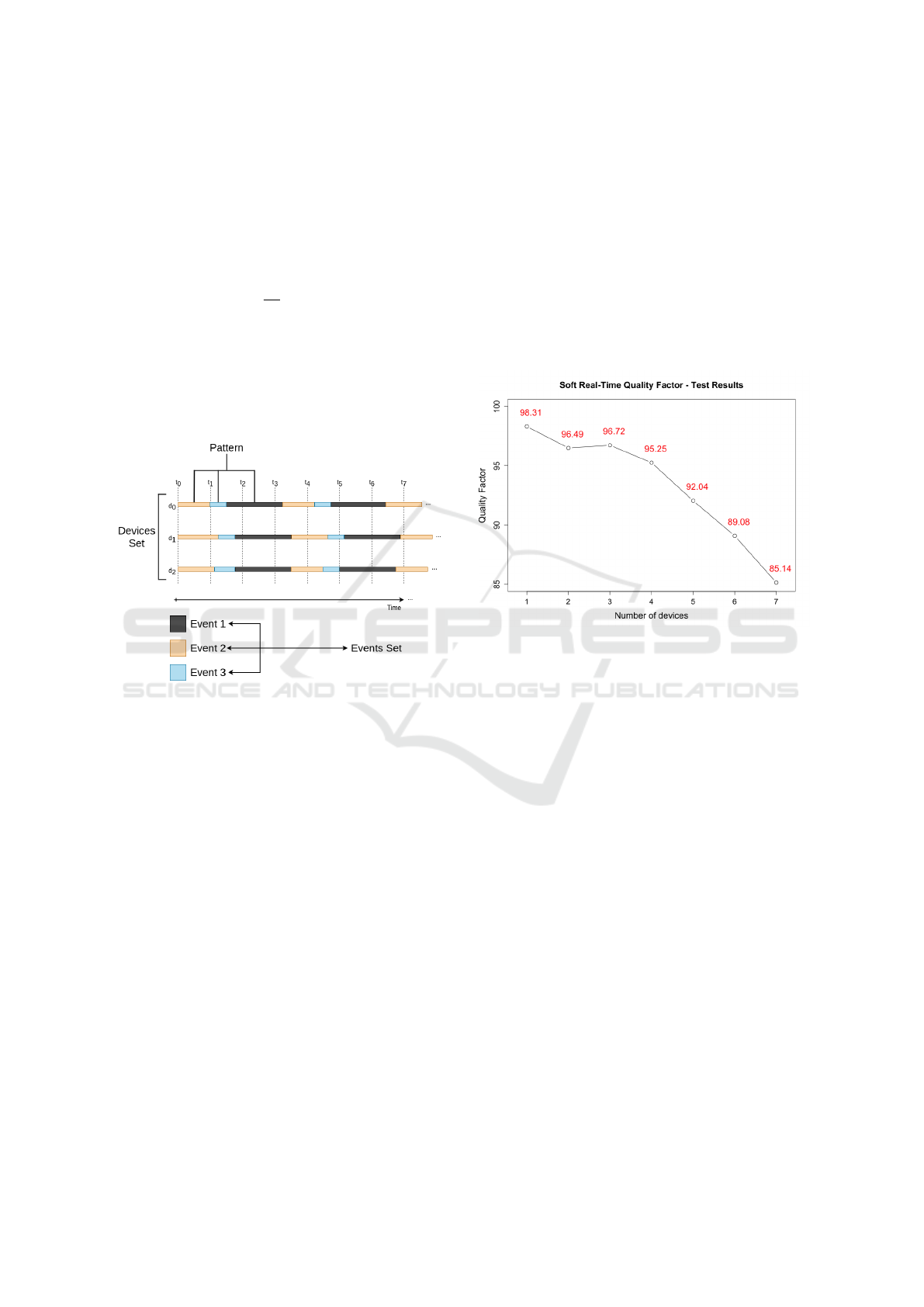
factors of this representation. Figure 4 displays the
results obtained from this test.
In Figure 4, the red line represents the ideal rela-
tion, represented by the d
vi
(d
r
) = d
r
function. From
the obtained points, represented as black spots in the
figure, we have obtained the line that represents the
actual behavior of the system given its real data. The
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
770
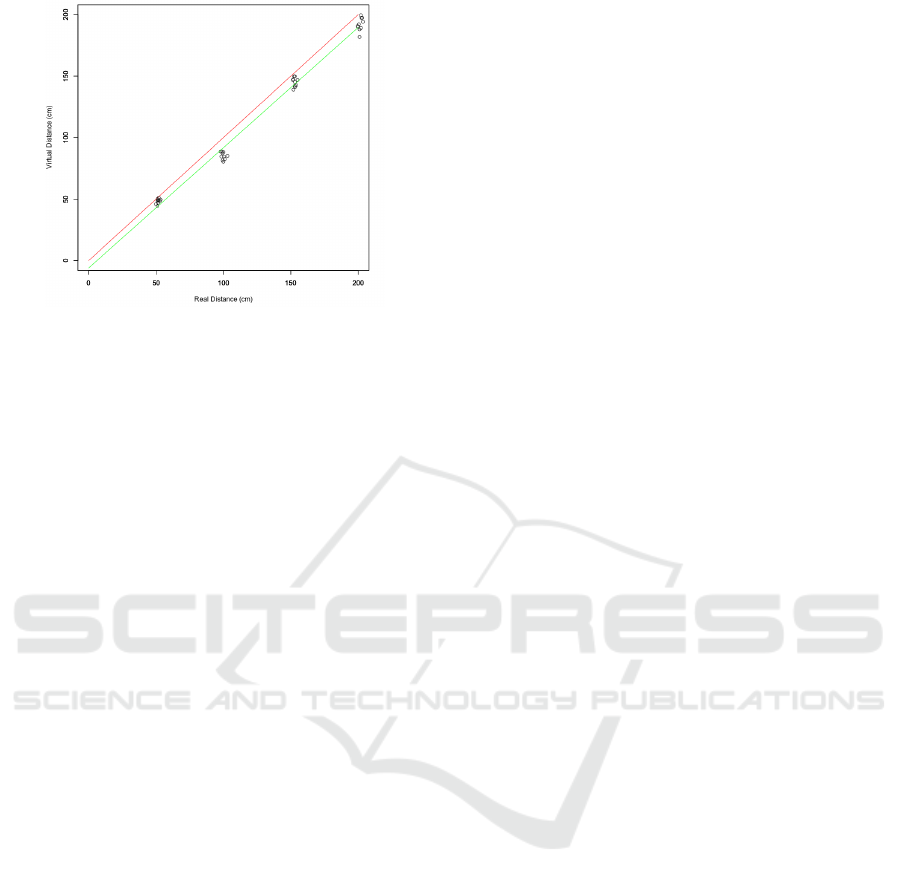
Figure 4: Validation Test Results.
green line displays the function that represents this
behavior, represented by the equation:
d
v
(d
r
) = 0.977.d
r
− 6.01
The resulting angular coefficient is α = 0.977 and the
linear coefficient is β = −6.008. The angular error
factor is α − 1 = −0.022. These results indicate that
the behavior of the virtual environment based on the
provided sensor data has a percentage error of approx-
imately -2.3%. Also, there’s an approximate offset of
6.01 cm, which can be easily solved by adding a bias
to the obtained sensor value.
3.3 Second Environment - Digital Twin
Inspection of Autonomous Robot
Routine
The second prototype environment is designed to
evaluate the Network and Communication constraint.
Through this architecture, we expect to assess the
real-time constraints of this system. For this task,
the robot performed an autonomous routine through
the ground, providing the sensor information through
network queries as an IoT node.
To test the network capability, multiple devices
persistently query the embedded sensors data. For
this matter, they must open the connection, retrieve
the data and close the connection. The robot connec-
tion node accepts one request at a time. As part of the
prototype environment, the devices generate a repro-
duction of the device position in a grid.
The robot runs two threads. One of them controls
its movements and data acquisition. The second one
controls the network connections. The devices will
have an active 50 ms sleep time, and then persistently
attempt to acquire the data from the sensor. To un-
derstand how the network affects the quality of the
provided data, we tested the time required for each
device to complete the following cycle:
1. Establish connection with the node;
2. Acquire data;
3. Produce digital twin frame;
4. Sleep (50ms);
The evaluation of the real-time constraint in the net-
work environment requires a test formalization. We
consider this scenario as a soft real-time system,
as the deadline violation decreases the quality of
the provided information without catastrophic conse-
quences. Thus, we designed this experiment strictly
as a Quality-of-Service (QoS) test, based on other
similar analyses in the context of Wireless Sensor
Networks and IoT (Silva and Oliveira, 2019; Bouk-
erche and Samarah, 2008; Silva et al., 2019). In
the existing perspectives, the examination considers
one or multiple devices consuming data from multi-
ple sensors. Thus, we created a proper formalization
for a scenario with various devices consuming data
from a single node.
At first, we evaluate the time as discrete intervals,
as the set T = t
i
, i = 0, 1, 2, 3, ..., following the rule
that t
i+1
−t
i
= θ, where θ is a constant sampling time.
The soft real-time deadline will be represented by φ,
where φ = k.θ, k ∈ N
∗
. In other words, the deadline
is represented as an integer number of sampling time
intervals. Given this start point, we establish the fol-
lowing definitions:
Definition 1. Let D = d
i
be the finite set of devices
consuming the data from the IoT node, where i ∈ N;
Definition 2. Let E = e
i
be the finite set of events that
each device performs, where i ∈ N;
Definition 3. Let L = l
d,e
be the length of time in-
terval that the device d takes to perform an event e,
where d ∈ D and e ∈ E;
Definition 4. Let P = p
i
be the set of patterns of
events to be observed in the devices, where p
i
= E
i
,
E
i
⊂ E and i ∈ N;
Definition 5. Let O = o
i
be the finite set of observa-
tions of a certain pattern p
i
∈ P on the devices, where
p
i
= E
i
, E
i
⊂ E and i ∈ N;
The equation that represents the elapsed time λ to ob-
serve a certain pattern p
i
∈ P is:
λ
p
i
=
∑
l
d,e
k
|∀e
k
∈ E
i
, E
i
= p
i
(4)
Given the equation above, let
ˆ
O be a subset of O,
where λ
p
i
≤ φ, ∀o
i
∈
ˆ
O. Finally, given the sets O and
ˆ
O:
Constraints and Challenges in Designing Applications for Industry 4.0: A Functional Approach
771
Definition 6. Let N be the number of elements on the
subset O;
Definition 7. Let N
h
be the number of elements on
the subset
ˆ
O
The quality factor Q
f
will be represented by the
following equation:
Q
f
=
N
h
N
(.100%) (5)
In other words, the quality factor observes how many
times the devices perform a pattern of events without
violating its soft real-time constraint. As presented
before, all devices will try to acquire the data and pro-
cess it in parallel and asynchronously. Figure 5 repre-
sents how this test works.
Figure 5: Illustration of the Observed Test Variables.
In this test, we experiment on how increasing the
number of querying devices affects the network qual-
ity factor.
3.4 Second Environment - Validation
Test Results
In the previous subsection, we demonstrated how to
evaluate the quality of a soft real-time constraint in
the context of a distributed IoT architecture. For this
matter, we evaluate and quantify how increasing the
number of devices consuming data affects the qual-
ity factor of the soft real-time system, following the
notation created. In this section, we present the orga-
nization and results of the employed tests.
At first, we established the following set of events
to evaluate:
• e1: Establish connection with the IoT node;
• e2: Acquire the node sensor data;
• e3: Process data and generate the frame of the
digital twin;
• e4: Sleep and idle time.
For testing aspects, we divided our time slots into
intervals of θ = 10ms. Furthermore, we established
a soft real-time deadline of φ = 10.θ = 100ms. We
tested this aspect for a system having from one to
seven devices as clients. These clients operate asyn-
chronously, and must persistently query the IoT de-
vice to acquire the sensors data. We used various
sets of devices, containing from one to seven clients.
The time length observations from the events were
recorded by each client.
Figure 6: Results of the Soft Real-Time Quality Factor Test.
From the quality test value, the expected behavior is a
loss of quality due to concurrency in the soft real-time
constraint. Figure 6 displays the results of the test for
each number of client devices. Typically, there is a
quality factor loss of 1% to 4% for each extra client
consuming the data. From qualitative analysis, this
quality loss reflects in the real-time precision in the
digital twin during the execution.
In further investigation, we also examined how
each step contributed to quality loss. For this mat-
ter, we analyzed the average period length for each
described event. From the data logs, we observed
that the main impairment in quality comes in the first
phase, which is the connection establishment. This
happens as the network concurrency increases and the
device answers one connection at a time.
4 DISCUSSION
In this work, we presented the main concepts, con-
straints, and challenges in designing Industry 4.0 ap-
plications. To understand how these constraints ap-
ply to design applications, we developed two different
architectures to simulate modern network-integrated
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
772

environments based on IoT and CPS concepts. From
those, it was able to test the two main aspects iden-
tified in the theoretical analysis: Software and Hard-
ware reliability, and Networking and Communication.
The first proposed architecture is a robot and dig-
ital twin virtual environment, with a data glove as a
Human-Robot Communication interface with tactile
feedback. For this matter, we created a local appli-
ance based on prototypes and providing a digital twin
virtual feedback environment.
Our validation test set consisted of comparing real
distances and their correspondence on the digital twin
environment for different measurements. The result
obtained for the digital twin shows that although its
percentage error of approximately -2.2% and an ap-
proximate offset of 6.01 cm.
This simulation displays relevant aspects that can
happen in the environment of an Industry 4.0, regard-
ing the uncertainties of the representation of digital
twins and possible uncertainty sources. With this
appliance, it was able to observe many uncertainty
sources, vital for designing an Industry 4.0 applica-
tion. Network traffic, sensor uncertainty, mechanical
flaws, hardware limitations, and configurations add
difficulties to the implementation of such an environ-
ment.
Nevertheless, the test allowed us to understand
how capable did the appliance perform all the pro-
posed tasks with adequate approximation. Therefore,
these tests are suitable tools to validate the proposed
architecture with the challenges of the element’s reli-
ability. Finally, it also helps to indicate possible prob-
lems associated with the communication of the nodes,
such as network traffic and latency, which were ana-
lyzed in the following tests.
The second proposed environment uses the evolu-
tion of the robot used in the previous section. How-
ever, the objective of this test is not to define the qual-
ity of the data produced by the hardware, but the in-
fluence of the network requests overload in the soft
real-time requirements. For this matter, we proposed
a test which interprets this constraint as a Quality-of-
Service issue.
The results of our test display that there is an
expected quality loss of 2% to 4% for each extra
node persistently consuming data from the device. At
first, only 1.69% of the requests violated the soft-
real time constraint with only one consuming device.
When running the same process with seven consum-
ing devices, the real-time constraint violation ratio in-
creased to 14.76%. Moreover, our further analysis
displays that networking overload is responsible for
this loss. This result indicates how the overload of
network requests in this environment impairs the real-
time constraints in distributed IoT networks in the In-
dustry 4.0.
In the papers found in the literature, no author for-
malized the main functional constraints for the Indus-
try 4.0 design process. Thus, we proposed two main
restrictions based on the ground concepts of these ap-
plications. Our tests in the prototype environments
display how the main constraints identified in the the-
oretical analysis affect a designed application.
ACKNOWLEDGMENTS
The authors would like to thank Renato Avilez for
developing the Data Glove. The authors would like
to thank CAPES, CNPq and the Federal Univer-
sity of Ouro Preto for supporting this work. This
study was financed in part by the Coordenac¸
˜
ao de
Aperfeic¸oamento de Pessoal de N
´
ıvel Superior -
Brasil (CAPES) - Finance Code 001.
REFERENCES
Abad, F. A. T., Mancuso, R., Bak, S., Dantsker, O., and
Caccamo, M. (2016). Reset-based recovery for real-
time cyber-physical systems with temporal safety con-
straints. In 2016 IEEE 21st International Conference
on Emerging Technologies and Factory Automation
(ETFA), pages 1–8. IEEE.
Ashokkumar, M. and Thirumurugan, T. (2018). Integrated
iot based design and android operated multi-purpose
field surveillance robot for military use. In Interna-
tional Conference for Phoenixes on Emerging Current
Trends in Engineering and Management (PECTEAM
2018). Atlantis Press.
Atzori, L., Iera, A., and Morabito, G. (2010). The internet of
things: A survey. Computer networks, 54(15):2787–
2805.
Bahrin, M. A. K., Othman, M. F., Azli, N. N., and Talib,
M. F. (2016). Industry 4.0: A review on indus-
trial automation and robotic. Jurnal Teknologi, 78(6-
13):137–143.
Boukerche, A. and Samarah, S. (2008). A novel algorithm
for mining association rules in wireless ad hoc sen-
sor networks. IEEE Transactions on Parallel and Dis-
tributed Systems, 19(7):865–877.
Brettel, M., Friederichsen, N., Keller, M., and Rosen-
berg, M. (2014). How virtualization, decentraliza-
tion and network building change the manufacturing
landscape: An industry 4.0 perspective. International
journal of mechanical, industrial science and engi-
neering, 8(1):37–44.
Farahani, B., Firouzi, F., Chang, V., Badaroglu, M., Con-
stant, N., and Mankodiya, K. (2018). Towards fog-
driven iot ehealth: Promises and challenges of iot in
medicine and healthcare. Future Generation Com-
puter Systems, 78:659–676.
Constraints and Challenges in Designing Applications for Industry 4.0: A Functional Approach
773

Gravalos, I., Makris, P., Christodoulopoulos, K., and Var-
varigos, E. A. (2018). Efficient network planning for
internet of things with qos constraints. IEEE Internet
of Things Journal, 5(5):3823–3836.
Hansen, F. O. (2017). Energy-aware model-driven devel-
opment of a wearable healthcare device. In Software
Engineering in Health Care: 4th International Sym-
posium, FHIES 2014, and 6th International Work-
shop, SEHC 2014, Washington, DC, USA, July 17-18,
2014, Revised Selected Papers, volume 9062, page 44.
Springer.
Hozdi
´
c, E. (2015). Smart factory for industry 4.0: A review.
International Journal of Modern Manufacturing Tech-
nologies, 7(1):28–35.
Iba
˜
nez, J. F., Casta
˜
neda, J. E. S., and Santos, J. C. M.
(2018). An iot camera system for the collection of data
using qr code as object recognition algorithm. In 2018
Congreso Internacional de Innovaci
´
on y Tendencias
en Ingenier
´
ıa (CONIITI), pages 1–6. IEEE.
Jang, S. Y., Lee, Y., Shin, B., and Lee, D. (2018).
Application-aware iot camera virtualization for video
analytics edge computing. In 2018 IEEE/ACM Sym-
posium on Edge Computing (SEC), pages 132–144.
IEEE.
K
¨
oseoglu, M., Celik, O. M., and Pektas, O. (2018). De-
sign of a smart glove for monitoring finger injury re-
habilitation process via mqtt server. In 2018 2nd Inter-
national Symposium on Multidisciplinary Studies and
Innovative Technologies (ISMSIT), pages 1–6. IEEE.
Lasi, H., Fettke, P., Kemper, H.-G., Feld, T., and Hoffmann,
M. (2014). Industry 4.0. Business & information sys-
tems engineering, 6(4):239–242.
Roja, P. and Srihari, D. (2018). Iot based smart helmet for
air quality used for the mining industry.
Saldivar, A. A. F., Li, Y., Chen, W.-n., Zhan, Z.-h., Zhang,
J., and Chen, L. Y. (2015). Industry 4.0 with cyber-
physical integration: A design and manufacture per-
spective. In 2015 21st international conference on
automation and computing (ICAC), pages 1–6. IEEE.
Saleh, J. H. and Cummings, A. M. (2011). Safety in the
mining industry and the unfinished legacy of mining
accidents: safety levers and defense-in-depth for ad-
dressing mining hazards. Safety science, 49(6):764–
777.
Samie, F., Tsoutsouras, V., Xydis, S., Bauer, L., Soudris,
D., and Henkel, J. (2016). Distributed qos manage-
ment for internet of things under resource constraints.
In Proceedings of the Eleventh IEEE/ACM/IFIP Inter-
national Conference on Hardware/Software Codesign
and System Synthesis, pages 1–10.
Shaikh, M. A., Weiguo, S., Shahid, M. U., Ayaz, H., and
Ali, M. (2018). An assessment of hazards and occu-
pational health & safety practices for workers in the
textile industry: A case study. Journal of Academic
Research in Business and Social Sciences, 8(12):333–
347.
Silva, M. and Oliveira, R. (2019). Analyzing the effect
of increased distribution on a wearable appliance. In
2019 IEEE 43rd Annual Computer Software and Ap-
plications Conference (COMPSAC), volume 2, pages
13–18. IEEE.
Silva, M. C., Amorim, V. J., Ribeiro, S. P., and Oliveira,
R. A. (2019). Field research cooperative wearable sys-
tems: Challenges in requirements, design and valida-
tion. Sensors, 19(20):4417.
Taneja, M. and Davy, A. (2017). Resource aware place-
ment of iot application modules in fog-cloud comput-
ing paradigm. In 2017 IFIP/IEEE Symposium on Inte-
grated Network and Service Management (IM), pages
1222–1228. IEEE.
Tuyishimire, E., Adiel, I., Rekhis, S., Bagula, B. A.,
and Boudriga, N. (2016). Internet of things in
motion: A cooperative data muling model under
revisit constraints. In 2016 Intl IEEE Conferences
on Ubiquitous Intelligence & Computing, Advanced
and Trusted Computing, Scalable Computing and
Communications, Cloud and Big Data Computing,
Internet of People, and Smart World Congress
(UIC/ATC/ScalCom/CBDCom/IoP/SmartWorld),
pages 1123–1130. IEEE.
Vogel-Heuser, B. and Hess, D. (2016). Guest edito-
rial industry 4.0–prerequisites and visions. IEEE
Transactions on Automation Science and Engineer-
ing, 13(2):411–413.
Xie, G., Peng, H., Li, Z., Song, J., Xie, Y., Li, R., and
Li, K. (2018). Reliability enhancement toward func-
tional safety goal assurance in energy-aware automo-
tive cyber-physical systems. IEEE Transactions on In-
dustrial Informatics, 14(12):5447–5462.
Zezulka, F., Marcon, P., Vesely, I., and Sajdl, O. (2016). In-
dustry 4.0–an introduction in the phenomenon. IFAC-
PapersOnLine, 49(25):8–12.
ICEIS 2020 - 22nd International Conference on Enterprise Information Systems
774
