
Exploring Spatio-temporal Movements for Intelligent Mobility Services
Tobias Gr
¨
uner
1 a
, S
¨
oren Frey
1 b
, Jens Nahm
1
and Dirk Reichardt
2
1
Independent Researcher, 70563 Stuttgart, Germany
2
Baden-Wuerttemberg Cooperative State University Stuttgart (DHBW Stuttgart), J
¨
agerstraße 56, 70174 Stuttgart, Germany
Keywords:
Mobility Services, Machine Learning, Prediction, Classification, POI Extraction, Clustering, Location Data.
Abstract:
Mobility services can substantially benefit from incorporating movement behavior information. Models of
daily travel routines can facilitate intelligent recommendations of suitable car sharing, ride pooling, or Mobility
as a Service (MaaS) offerings, for instance. However, existing approaches that infer regular travel activities
from historical location data exhibit several limitations. For example, they often have an insufficient resolution
in the spatial and temporal dimension or are restricted to predicting only the next location visit. This paper
presents an activity-based approach to model daily travel routines and predict regularities with the help of
machine learning (ML). We first extract points of interest (POIs) and corresponding visits from historical
location data. Then, regularities for these visits are identified with the help of classification. We validate our
work in progress approach using data from voluntary, consenting test subjects (CTS) who agreed to track their
movements. They labeled their own data for each activity with corresponding regularity information. We show
that POI visits can already be predicted reliably for the first classes of movements.
1 INTRODUCTION
Over the last years, the automotive industry has es-
tablished an ample service portfolio that augments
and enhances classical transportation schemes. Cor-
responding mobility services address many different
areas and needs. They range from trip planning, con-
gierge, and sharing services to further offerings sub-
sumed under the Mobility as a Service (MaaS) (Jit-
trapirom et al., 2017) umbrella that also encourage
multi-modal transportation modes. To keep up and
advance valuable assistance and support, the services
have to become increasingly intelligent and personal-
ized. Utilizing location information and understand-
ing consenting individuals’ movement behavior opens
up many ways to increase convenience by optimizing
their daily routines.
For example, the presence of nearby car shar-
ing vehicles, the pre-booking of a ride pooling tour,
or the most cost-efficient MaaS-based mix of trans-
port carriers can be proactively suggested based on
movement information inferred from historical loca-
tion data. However, existing approaches for inferring
movement behavior are less suited in the context of
mobility services. For example, they often address
a
https://orcid.org/0000-0002-0913-0472
b
https://orcid.org/0000-0002-4087-6117
different target domains with lower resolutions in the
spatial and temporal dimension or are restricted to
predicting only the next location visit.
This paper presents our activity-based work in
progress approach (Gr
¨
uner, 2019) to describe daily
travel routines and predict regularities with the help
of machine learning (ML). We introduce a movement
behavior model that covers regularity and irregular-
ity in both the temporal and spatial dimension. In our
pre-processing pipeline we first extract points of in-
terest (POIs) and corresponding visits from historical
location data with the help of clustering. The iden-
tification of the movement classes for these visits is
then approached as a classification problem. A group
of voluntary, consenting test subjects (CTS) agreed to
track their movements. They labeled the data for each
of their activities with corresponding movement in-
formation. The resulting dataset is split and used for
training and validating the classification model. We
show that our work in progress approach can already
predict POI visits reliably for the first types of move-
ment classes. In summary, the main contributions of
our work are:
• An activity-based approach to model spatio-
temporal movement behavior.
• A pre-processing pipeline for the extraction of
POI visits from historical location data.
Grüner, T., Frey, S., Nahm, J. and Reichardt, D.
Exploring Spatio-temporal Movements for Intelligent Mobility Services.
DOI: 10.5220/0009563801230128
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 123-128
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
123

Figure 1: High-Level approach for learning and predicting spatio-temporal movement patterns.
• A validated classification model for the prediction
of first types of movement information.
The remainder of the paper is structured as fol-
lows. The related work is described in the next Sec-
tion 2. Our approach for modeling movement behav-
ior, the extraction of POI visits, and the classifica-
tion model used for prediction is described in Sec-
tion 3. The evaluation of this model is then presented
in Section 4. Section 5 discusses the experiment re-
sults before Section 6 draws the conclusions.
2 RELATED WORK
The investigation and usage of movement patterns
is relevant in many areas. For example, synthetic
Daily Activity-Travel Patterns (DAPs) were gener-
ated based on a household travel survey from 1991 to
simulate and forecast travel demands (Kitamura et al.,
1997). While DAPs rely on a sample of a single day
in order to forecast travel demand for a large group
of people, our work focuses on the detection of actual
movement patterns of a single person.
Global Positioning System (GPS) data is used in
(Ashbrook et al., 2002) to learn POIs and predict user
movements with the help of a Markov model. From a
current location, the model can be asked for a user’s
next most likely significant location (POI). Vintan et
al. also propose an approach that tries to determine a
person’s next movement (Vintan et al., 2004). They
use multi-layer perceptron neural predictors with and
without pre-training. In comparison, our work utilizes
a gradient boosting machine learning approach (XG-
Boost). It is not restricted to predicting the immedi-
ately next POI but rather identifies inherent movement
patterns independent from the current state.
Vukovic et al. discuss the prediction of move-
ments using a hybrid solution based on user move-
ment statistics and neural networks to identify move-
ment regularities (Vukovic et al., 2007). The posi-
tion data is gained from mobile network cell infor-
mation as opposed to the GPS positioning with a
higher resolution used in our approach.
1
Instead of
1
Our work uses GPS but the approach can also be uti-
lized with other geo-spatial positioning systems
just distinguishing regular from irregular movements,
our movement patterns can represent regularity and
irregularity in the spatial and temporal dimensions.
A sequential patterns data mining approach to
extract frequent movement patterns of vehicles in
vehicular ad-hoc networks (VANETs) is proposed
in (Merah et al., 2013). The movement patterns are
used to generate movement rules with associated
probabilities. In contrast, we utilize machine learning
(XGBoost) and are not restricted to VANETs.
3 PREDICTION OF
SPATIO-TEMPORAL
MOVEMENT PATTERNS
3.1 Overview
Processing Phases. This work is structured into
two key phases (see Figure 1). In the POI Detection
phase, the recorded and labeled historic location data
of individuals is interpolated and POIs and visits at
such are detected (see Section 3.3). The phase results
in a list containing all recorded visits at all POIs of
an individual. This list of visits is extended in the
following Pattern Detection phase in order to find ac-
tivities and their related movement patterns based on
the regularity and similarity of visits at POIs (see Sec-
tion 3.4).
To achieve this, an appropriate set of features
is designed and an ML model is trained to classify
the activities with their corresponding movement pat-
terns. Basic concepts which constitute the basis for
the two phases are introduced in Section 3.2
Data Basis. We recruit a small group (n = 13) of
voluntary CTS (referred to as P1-P13) to create a data
basis for developing and evaluating our proposed ap-
proach. Following EU’s General Data Protection Reg-
ulation (GDPR) is of primary concern. We make sure
to comply with all corresponding rules. We are inter-
ested in a comprehensive set of actual movements in-
dependent of the used means of transportation. This
allows for an extensive analysis of all movements
in order to recommend, for example, multi-modal
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
124

routes. Hence, the CTSs rather record their location
data using a smartphone app
2
instead of relying solely
on vehicle telematics systems, for instance.
The density of the recorded tracking positions
varies per CTS (see Figure 2) as they all use differ-
ent devices and visit places with different GPS signal
strengths. This emulates a realistic setting with het-
erogeneous types of user devices and behaviors. The
historical location data is recorded over a period of
approx. three months. For each day, the CTSs label
their data for each of their activities by defining the
corresponding (1) movement pattern type, (2) times-
lot(s), and (3) POI(s). These concepts are described
in Section 3.2. The emerging dataset is split up into
a modeling dataset D
M
, which is required to find a
proper pre-processing pipeline configuration, and an
evaluation dataset D
E
, on which the approach is eval-
uated (see Section 4). Due to the numerous parame-
ters which have to be determined in order to configure
the pre-processing steps, D
M
consists of ten (n=10)
and D
E
consists of three (n=3) CTSs.
3.2 Basic Concepts
This work uses a movement behavior model that uti-
lizes an activity-based approach
3
to describe an indi-
vidual’s travel behavior and to link each activity to
a movement pattern. A movement pattern is defined
by a spatial and temporal regularity. The spatial reg-
ularity is a set of locations (POIs) that are visited at
the given timeslot(s). A timeslot T defines the tem-
poral regularity at which the activity is performed at
the given location(s). There are many examples for
activities like working, buying weekly groceries, and
sport activities that take place at specific weekdays on
weekly periodicities. Hence, a timeslot T consists of
a set of weekdays (D
v
(T )) for which a location is vis-
ited on a p
w
(T )-weekly periodicity (see Equation 1).
T = (D
v
(T ), p
w
(T )),
D
v
(T ) ⊆ {Monday, Tuesday, . . . ,Sunday} ∧
p
w
(T ) ∈ N
+
, n ≤ 53
(1)
Movement patterns are categorized into four types
based on their spatial and temporal regularity. For
each regularity dimension the types are differentiated
into a regular and an irregular case. The types are RT-
RL, IT-RL, RT-IL, and IT-IL as displayed in Table 1.
For example, if an individual performs an activ-
ity always on Mondays and Tuesdays every week at
2
https://gpslogger.app
3
Activity-based approaches consider travel as a conse-
quence of individuals pursuing different activities at dis-
tributed locations (Hall, 2012).
Figure 2: Density of recorded GPS positions.
Table 1: Movement pattern types.
Temporal
Regular Irregular
Regular
Regular Time,
Regular Location
(RT-RL)
Irregular Time,
Regular Location
(IT-RL)
Spatial
Irregular
Regular Time,
Irregular Location
(RT-IL)
Irregular Time,
Irregular Location
(IT-IL)
a specific location, the activity has a movement pat-
tern of type RT-RL and is linked to one timeslot T =
({Monday, Tuesday}, 1). If the exemplary individual
performs the same activity alternating each week (e.g.
for even weeks on Monday and for uneven weeks on
Tuesday), then the movement pattern of the activity is
still of type RT-RL but it is now linked to two times-
lots T
1
= ({Monday}, 2) and T
2
= ({Tuesday}, 2).
If the activity takes place at different weekdays but no
temporal regularity determines which weekday is vis-
ited, the movement pattern of the activity is of type
IT-RL and is therefore linked to no timeslot.
3.3 POI Detection
In order to detect POIs and POI visits, the location
data is filtered for outliers, interpolated, and clustered.
Outlier Removal. There is a variety of outliers in
the location traces of the dataset due to inaccurate
measures of the GPS devices. By interpolating the
traces the impact of these errors on the data quality
increases. Therefore, the location traces of the CTS
group have to be filtered before they are interpo-
lated. We use the Isolation Forest algorithm (Liu et al.,
2008) to remove outliers in the data basis.
Interpolation. As a GPS signal is not always avail-
able, e.g. inside buildings (Kjærgaard, M. B. et al.,
2010), the recorded GPS positions of the CTS group
can be sparse and therefore include gaps (see Fig-
ure 3a). The GPS traces are linearly interpolated in
order to create a continuous history (see Figure 3b).
Exploring Spatio-temporal Movements for Intelligent Mobility Services
125
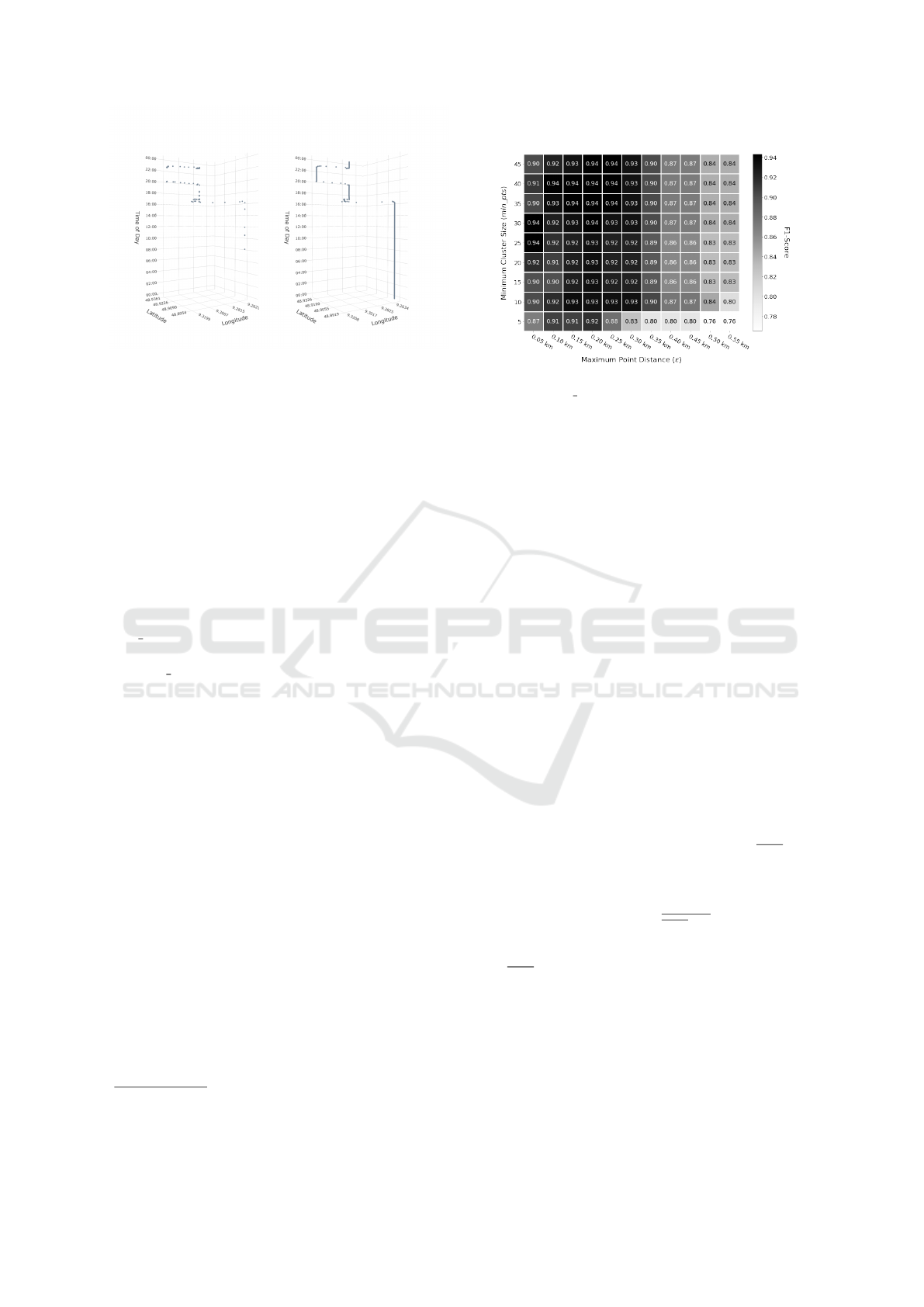
(a) Raw (b) Interpolated
Figure 3: The sparse location data of an exemplary day from
a single CTS (a) is interpolated every 120 seconds (b). Four
visits at three POIs are recorded for this day.
The interpolation interval depends on the use case,
since a longer interpolation interval eliminates short
stops at locations. We use a 120 second interval to
interpolate the location data of the CTSs in order to
also detect visits of short duration.
Clustering. The interpolated location traces are
clustered using the Density-based Spatial Cluster-
ing of Applications with Noise (DBSCAN) algo-
rithm (Ester et al., 1996). The maximum point dis-
tance ε and the minimum number of cluster points
min pts for DBSCAN are empirically determined
with the help of D
M
. Here, the parameters ε = 0.2
and min pts = 40 identify the most POIs according
to the F1 score (see Figure 4). To measure the cor-
rect identification of POIs via DBSCAN, the identi-
fied cluster centers are compared to the known POIs
for a set of test days. An uncertainty radius r
u
has to
be determined within which locations cannot be dis-
tinguished due to the accuracy of the GPS signal. We
estimate this radius by calculating the median of all
standard distances (Bachi, 2005) of all GPS points for
those days on which the CTS stays at one POI for the
whole day. On our data set D
M
we approximate the
radius with r
u
≈ 300m. The cluster centroids are con-
sidered as POIs. A POI can be visited multiple times a
day. The visits are extracted from the POI clusters as
follows. The corresponding points of each cluster are
ordered temporally. Every time the timespan between
two points of a cluster exceeds a certain threshold
4
the following points are considered as another visit.
3.4 Temporal Pattern Detection
To detect temporal patterns two feature types are cre-
ated and an ML model is trained. For the detection
4
As the GPS traces are interpolated there are no time
gaps between consecutive tracking points of a cluster.
Figure 4: POI detection performance of DBSCAN depend-
ing on ε and min pts parameters with r
u
= 300m.
of spatial patterns the similarity of visits at different
locations has to be measured. As only an insufficient
number of activities are labeled with the RT-IL pattern
type by our CTSs, the feature types for the detection
of this pattern will be addressed separately in our fu-
ture work.
Feature Engineering. To indicate whether visits at
a certain location are occurrences of a temporally reg-
ular or irregular activity, the feature types cv
vpd
(T )
(visits per day coefficient of variation) and c
d pw
(T )
(days per k-th week coefficient) are introduced. Each
feature type represents a set of features. Each fea-
ture corresponds to a specific timeslot. In order to
determine the likeliness of a specific timeslot to be
present, each place and its visits are considered sep-
arately. If a timeslot T is present, the corresponding
place should be equally often visited for all of its
weekdays (D
v
(T )) over the entire observed time. To
measure the uniformity of the distribution of week-
days at a given place, the visits per day coefficient
of variation (cv
vpd
(T )) is defined as the quotient of
the standard deviation between the visits per weekday
(s
vpd
(T )) and the mean visits per weekday (n
vpd
(T ),
see Equation 2) of the given timeslot T .
cv
vpd
(T ) = min(
s
vpd
(T )
n
vpd
(T )
, 1)
(2)
To determine the dividend (s
vpd
(T )) and the divi-
sor (n
vpd
(T )), only the weekdays D
v
(T ) of the times-
lot T are considered. The coefficient of variation is
restricted to the value range cv
vpd
(T ) ∈ [0, 1]. The
closer cv
vpd
(T ) is to 0 the more likely a movement
pattern with a temporal regularity for the given times-
lot is present. An example for calculating cv
vpd
(T ) is
provided later in this section.
The feature c
d pw
(T ) (see Equation 3) indicates
how close the average number of visited days per
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
126

p
w
(T )-th week (n
d pw
(T )) is to the overall num-
ber of different days on which a place is visited
(|D
v
(T )|). The place should be visited on each of the
timeslot’s weekdays in every p
w
(T )-th week for the
timeslot T to be present. The closer c
d pw
(T ) is to the
maximum 1.0, the more likely a movement pattern
with a temporal regularity for the given timeslot T is
present.
c
d pw
(T ) =
n
d pw
(T )
|D
v
(T )|
(3)
Example: In Table 2, exemplary visits for an ac-
tivity with a movement pattern of type RT-RL
is present and a single (correct) timeslot T
c
=
({Tuesday, T hursday}, 1) at a specific place is dis-
played. Two outliers from the timeslot are present
in the example: On Monday in the third week an
additional visit is recorded on a non-regular day
and on Thursday in the fifth week a visit is miss-
ing. To compare different instances of the feature
types (features of a specific timeslot), both feature
types are calculated for a second (incorrect) timeslot
T
i
= ({Monday, Tuesday, T hursday}, 1).
The feature type cv
vpd
(T ) for both timeslots is
calculated in Equation 4 and Equation 5. The low
cv
vpd
(T
c
) ≈ 0.1 (see Equation 4) indicates that the
exemplary place is visited similarly often for D
v
(T
c
),
wherefore the timeslot T
c
is likely to be present.
n
vpd
(T
c
) =
6 + 5
2
= 5.5
s
vpd
(T
c
) =
r
(6 − 5.5)
2
+ (5 − 5.5)
2
)
2
= 0.5
cv
vpd
(T
c
) = min(
s
vpd
(T
c
)
n
vpd
(T
c
)
, 1) =
0.5
5.5
≈ 0.1
(4)
For the incorrect timeslot T
i
, cv
vpd
(T ) is no longer
close to 0 (cv
vpd
(T
i
) ≈ 0.54, see Equation 5).
n
vpd
(T
i
) =
1 + 6 + 5
3
= 4 s
vpd
(T
i
) ≈ 2.16
cv
vpd
(T
i
) = min(
s
vpd
(T
i
)
n
vpd
(T
i
)
, 1) =
2.16
4
≈ 0.54
(5)
By also considering feature type c
d pw
(T ) (in the
given example c
d pw
(T
c
) ≈ 0.92, see Equation 6), the
presence of the investigated timeslot can be confirmed
as it is close to the maximum 1. The feature type
c
d pw
(T ) decreases if an outlier is introduced to the
timeslot. For the incorrect timeslot T
i
, the feature
value decreases to c
d pw
(T
i
) ≈ 0.67.
n
d pw
(T
c
) =
2 + 2 + 2 + 2 + 1 + 2
6
≈ 1.83
c
d pw
(T
c
) =
n
d pw
(T
c
)
|D
v
(T
c
)|
≈
1.83
2
≈ 0.92
(6)
Table 2: Calendar with exemplary visits at a place with
a single timeslot. Visited days are marked gray. For both
timeslots (T
c
, T
i
), the number of visits at the place for each
day of the week (n
vpd
(T )) is counted below and the number
of visits for the place in every single week is counted on the
right (n
d pw
(T )).
Week Mo. Tu. Wed. Thu. Fri. Sa. Su. n
d pw
(T
c
) n
d pw
(T
i
)
1 2 2
2 2 2
3 2 3
4 2 2
5 1 1
6 2 2
n
vpd
(T
c
) 0 6 0 5 0 0 0
n
vpd
(T
i
) 1 6 0 5 0 0 0
Model Creation and Training. The described fea-
tures are used to train an XGBoost (Chen et al., 2016)
model. The model is trained to determine if the vis-
its at a POI relate to a movement pattern which is
regular or irregular in the temporal dimension by us-
ing cv
vpd
(T ) and c
d pw
(T ). The parameter configura-
tion n estimators = 1000, max depth = 100, λ
reg
= 5
performed best with an F1 score of 0.81 for D
M
.
4 EVALUATION
The experiments evaluate (1) the capabilities of our
pre-processing pipeline for detecting visited POIs
and (2) the performance of our classification model
regarding the differentiation between temporal regu-
lar and irregular movement patterns.
POI Detection. The evaluation dataset D
E
(see Sec-
tion 3.1) is used for evaluating the POI detection
quality. We compare the labeled POIs with the POIs
identified by the pre-processing pipeline by checking
whether an identified POI is within the uncertainty ra-
dius r
u
≈ 300m (see Section 3.3) of a labeled POI.
Table 3 shows the results with the metric F1 as the
main outcome of the experiment execution. The mean
F1 score from all three CTSs is approx. 0.82 with a
standard deviation of approx. 0.05.
The number of POIs that have been labeled but are
not identified by the pre-processing pipeline (FN) is
higher than the number of points that have been incor-
rectly identified as POIs (FP) for all three CTSs (see
Table 3). Therefore the recall with a mean of approx.
0.78 is lower than the precision with a mean of ap-
prox. 0.86.
Model Performance. The model is trained on the
dataset D
M
and tested using D
E
. The evaluation of
the model performance yields an F1 score of 0.81 and
0.86 for D
M
and D
E
, respectively.
Exploring Spatio-temporal Movements for Intelligent Mobility Services
127

Table 3: POI detection quality for three CTSs (TP, FP, FN
correspond to the number of true positives, false positives,
and false negatives, respectively).
No. TP FP FN Precision Recall F1
1 165 43 52 0.79 0.76 0.78
2 110 17 35 0.87 0.76 0.80
3 106 8 24 0.93 0.82 0.87
5 DISCUSSION
The distributions of the movement pattern types of
D
M
and D
E
are skewed. Hence, F1 is our main met-
ric of interest as it combines precision and recall. We
also use F1 for assessing the POI detection, which
performs reasonably well with a mean F1 score of
approx. 0.82 (D
E
). Our classification model performs
even better with an F1 score of approx. 0.86 (D
E
).
However, there exist several threats to validity.
The number of available CTSs and, as a consequence,
the dataset size are rather low. This also leads to a lim-
ited size of the evaluation dataset D
E
, which might
explain that F1 for D
M
is lower than for D
E
. For
the POI detection, the clustering technique DBSCAN
provided the best results for the given dataset. Other
clustering techniques might be better suited for larger
datasets. Furthermore, in order to minimize the label-
ing effort, the CTS group only had to label the activ-
ities they considered as regular. Not labeling presum-
ably non-regular activities can lead to more errors as
each CTS might not be aware of all her actual regu-
larities.
Moreover, the location data is recorded by a rather
homogeneous group of CTSs that are very simi-
lar in terms of worksite affiliation, working hours,
and age. In contrast, the travel behavior of distinct
user groups differs, e.g. between home-based per-
sons (like homemakers) and persons who travel to
their workplace (Kutter, 1973). The proposed features
may therefore be not as effective for different group
compositions. Furthermore, our work in progress ap-
proach was only validated for timeslots with 1-week
periodicities. We will further investigate the robust-
ness of the features and our approach, especially for
additional timeslot types, in our future work.
6 CONCLUSIONS
Digitization in the automotive industry causes the
change from car manufacturers to mobility service
providers. For example, to propose meaningful MaaS
offerings to interested and consenting individuals,
movement regularities have to be identified. Our pro-
posed approach can model daily travel routines and
predict regularities using the machine learning algo-
rithm XGBoost. We demonstrate that already small
datasets enable acceptable performance for POI de-
tection and future movement prediction (F1 > 0.8).
In our future work, we will investigate the remain-
ing movement pattern types, further temporal period-
icities, and sub-weekday time unit granularity. More-
over, we will explore how the evolution of movement
behavior over time can be incorporated.
REFERENCES
Ashbrook, D. et al. (2002). Learning significant locations
and predicting user movement with GPS. In Proc. 6th
Int’l Symp. on Wearable Computers, pages 101–108.
Bachi, R. (2005). Standard Distance Measures and Related
Models for Spatial Analysis. Papers in Regional Sci-
ence, 10:83–132.
Chen, T. et al. (2016). XGBoost: A Scalable Tree Boosting
System. Proc. of the 22nd ACM SIGKDD Int’l Conf.
on Knowledge Discovery and Data Mining - KDD ’16.
Ester, M. et al. (1996). A Density-Based Algorithm for
Discovering Clusters in Large Spatial Databases with
Noise. In Proc. of the Second Int’l Conf. on Knowl-
edge Discovery and Data Mining, KDD’96, page
226–231. AAAI Press.
Gr
¨
uner, T. (2019). Detecting Complex Spatio-temporal
Movement Patterns Using Historical Location Data.
DHBW Stuttgart, Germany. Bachelor’s Thesis.
Hall, R. (2012). Handbook of Transportation Science. Int’l
Series in Operations Research & Management Sci-
ence. Springer US.
Jittrapirom, P. et al. (2017). Mobility as a Service: A Crit-
ical Review of Definitions, Assessments of Schemes,
and Key Challenges. Urban Planning, 2(2):13–25.
Kitamura, R. et al. (1997). Generation of Synthetic Daily
Activity-Travel Patterns. Transportation Research
Record, 1607(1):154–162.
Kjærgaard, M. B. et al. (2010). Indoor Positioning Using
GPS Revisited. In Pervasive Computing, pages 38–
56.
Kutter, E. (1973). A Model for Individual Travel Behaviour.
Urban Studies, 10(2):235–258.
Liu, F. T. et al. (2008). Isolation Forest. In 2008 Eighth
IEEE Int’l Conf. on Data Mining, pages 413–422.
Merah, A. F. et al. (2013). A Sequential Patterns Data
Mining Approach Towards Vehicular Route Predic-
tion in VANETs. Mobile Networks and Applications,
18:788–802.
Vintan, L. et al. (2004). Person Movement Prediction Using
Neural Networks. In First Workshop on Modeling and
Retrieval of Context, pages 1–12.
Vukovic, M. et al. (2007). Predicting user movement for
advanced location-aware services. In 2007 15th Int’l
Conf. on Software, Telecommunications and Com-
puter Networks, pages 1–5.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
128
