
Integrating Multiscale Deformable Part Models and Convolutional
Networks for Pedestrian Detection
Wen-Hui Chen
a
, Chi-Wei Kuan
b
and Chuan-Cho Chiang
c
Graduate Institute of Automation Technology, National Taipei University of Technology, Taipei, Taiwan
Keywords: Advanced Driver Assistance Systems, Convolutional Neural Networks, Deformable Part Models, Pedestrian
Detection.
Abstract: Pedestrian detection has many real-world applications, such as advanced driver assistance systems, security
surveillance, and traffic control, etc. One of the pedestrian detection challenges is the presence of occlusion.
In this study, a jointly learned approach using multiscale deformable part models (DPM) and convolutional
neural networks (CNN) is presented to improve the detection accuracy of partially occluded pedestrians. Deep
convolutional networks provide a framework that allows hierarchical feature extraction. The DPM is used to
characterize non-rigid objects on the histogram of oriented gradients (HoG) feature maps. Scores of the root
and parts filters derived from the DPM are used as deformable information to help improve the detection
performance. Experimental results show that the proposed jointly learned model can effectively reduce the
miss rate of CNN-based object detection models tested on the Caltech pedestrian dataset.
1 INTRODUCTION
According to the World Health Organization (WHO)
report, road traffic accidents are the leading cause of
death and injury. It indicated that several hundred
thousand people lost their lives on roads each year
(World Health Organization, 2013). The growth of
automobiles over the past decade has contributed to
the rise of the accident rate.
With the pervasion of digital technology,
advanced driver assistance systems (ADAS) have
gained popularity in the automotive industry in recent
years. Nowadays, many modern vehicles have
equipped with some sort of ADAS functions to
provide drivers with safer, better, and more
comfortable driving experience. Pedestrian detection
is one of the key ADAS functions to safety control
and collision avoidance.
The main challenges of pedestrian detection
include human body articulation, occlusion, the
changes of illumination and angle of view, and
varying in appearance as well as scales. For example,
people look different when wearing different clothes
or taking different poses. In addition, lighting
a
https://orcid.org/0000-0003-2015-5256
b
https://orcid.org/0000-0003-2269-8158
c
https://orcid.org/0000-0002-2535-6121
variations can also influence the image pixel values
of an object, leading to the challenge of the object
detection tasks in computer vision (Stefan Schnürle et
al, 2017; Ortalda et al., 2018).
In the early stage, most detection algorithms were
developed on designing handcrafted features.
Deformable part models (DPM) that use the
histogram of oriented gradients were the state-of-the-
art approach in this period. Although many
approaches have demonstrated some promising
results, they were usually not robust and lack the
generalized discriminative capability and some were
even computationally intensive.
In 2012, the rise of convolutional neural networks
(CNN) ignited the progress of object detection and
became the mainstream of pedestrian detection
research. In general, deep learning-based approaches
have better performance over traditional learning
models using handcrafted features on object detection
but they heavily rely on training data to achieve
qualified performance. In addition, most deep
learning-based detection models were pre-trained on
public datasets that lack occluded pedestrians, leading
Chen, W., Kuan, C. and Chiang, C.
Integrating Multiscale Deformable Part Models and Convolutional Networks for Pedestrian Detection.
DOI: 10.5220/0009459005150521
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 515-521
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
515

to a poor detection rate on partially occluded
pedestrians.
In this study, we integrate the DPM and CNN to
handle the occluding problem in pedestrian detection.
The DPM is to provide a description of flexible
human body models that can help detect partially
occluded pedestrians.
The remainder of this paper is organized as
follows. A review of the related work on pedestrian
detection is provided in Section 2. The proposed
approach and an overview of DPM are described in
Section 3. The experimental setup and results are
presented in Section 4. Finally, conclusions are drawn
in Section 5.
2 RELATED WORKS
The study of pedestrian detection has been an active
research topic for many years due to its potential
applications. In this section, the related works on
vision-based pedestrian detection are discussed. The
development of pedestrian detection algorithms is
closely related to the evolution of object detection as
it is an application of computer vision. Numerous
approaches have been proposed in the past decades,
but some issues still remain unsolved and need to be
addressed.
In the early stage, traditional pedestrian detection
approaches highly rely on domain knowledge to
design sophisticated features. Viola and Jones (2001)
introduced a detection algorithm with Haar-like
features and an AdaBoost cascade framework. The
Viola-Jones (VJ) algorithm was originally proposed
for face detection. Shortly afterward, it has been
further applied to other detection problems, including
pedestrian detection (Viola et al., 2003). The VJ
detection algorithm was considered the first approach
that can reach real-time performance, but it has some
limitations including sensitive to lighting conditions
and ineffective to encode the variance of a pedestrian
in posture and appearance.
In 2005, the histogram of oriented gradients
(HoG) was proposed as the features for human
detection (Dalal & Triggs, 2005). This approach first
divides an image into blocks and further divided each
block into cells. The concept of HoG is to convert a
pixel-based representation into a gradient-based one
by calculating the gradient of each cell and building
the histogram for all the orientations in a cell with
discrete orientation bins.
HoG can be considered as the object information
compressed and encoded in the orientation histogram
that is ready to be fed into a classifier, such as support
vector machines. However, HoG is very sensitive to
image orientation and unable to characterize
information well in a smooth region (Cheon et al.,
2011).
The human body is a non-ridge object.
Felzenszwalb et al. (2008) proposed deformable part
models (DPM) that take the object deformation into
consideration by including the deformable cost
according to the displacement of each object part
relative to its root location. DPM is a learning-based
object detection algorithm defined by a constrained
part-based model. It won the PASCAL VOC
challenges (Felzenszwalb et al., 2010) and is
considered the state-of-the-art algorithm for object
detection before deep learning becomes popular.
During 2010-2012, the research of pedestrian
detection reached a period of the plateau without
significant performance improvement (Zhao et al.,
2019). The reasons for the stagnant include: (1)
sliding-based bounding boxes generation is
inefficient and inaccurate; (2) manually designed
features are not robust.
Since 2012, the resurgence of neural networks
with deep architecture and the growth of computing
power from hardware acceleration have led deep
learning to great success in various fields, especially
in computer vision. Instead of using handcrafted
features, one of the advantages of deep learning is its
ability to learn high-level features automatically.
In 2014, a pioneer work by applying deep learning
to object detection was proposed (Girshick et al.,
2014). The authors cleverly introduced the regions
with CNN features to boost the mean average
precision in object detection accuracy. Since then, the
development of object detection begins to grow
(Rasmussen et al., 2017). Now, there are many CNN-
based object detection approaches including Fast R-
CNN (Girshick, 2015), Faster R-CNN (Ren et al.,
2015), SSD (Liu et al., 2016), and YOLO (Redmon et
al., 2016; Redmon & Farhadi, 2018). Deep learning
to pedestrian detection in this period also achieved
promising results (Sermanet et al., 2013; Ouyang &
Wang, 2013; Luo et al., 2014). In addition to CNN,
recurrent neural networks (RNNs) were also
successfully applied to pedestrian detection to
improve the average precision (Zhang & Kim, 2018).
One of the main challenges of pedestrian
detection comes from the occlusion of the human
body and has yet to discover an effective approach to
deal with this issue. Ouyang and Wang (2012)
proposed a DPM based method to improve the
detection accuracy in occlusion. They used the
restricted Boltzmann machine (RBM) to build the
leaning model. However, the stacked RBMs as
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
516
multiple layers of architecture lack semantic
meanings.
Although deep architectures outperform shallow
models in many challenging tasks, there are some
ideas in state-of-the-art shallow models that are still
useful and can be used to further improve the results
achieved by deep learning models. In this study, we
include the combined response derived from the DPM
as the deformable score maps to improve the
detection accuracy of the CNN-based models.
3 THE PROPOSED APPROACH
In this section, we describe how to improve the
performance of pedestrian detection by adopting the
deformable score maps from DPM and applying them
to a CNN-based detection model. The computation
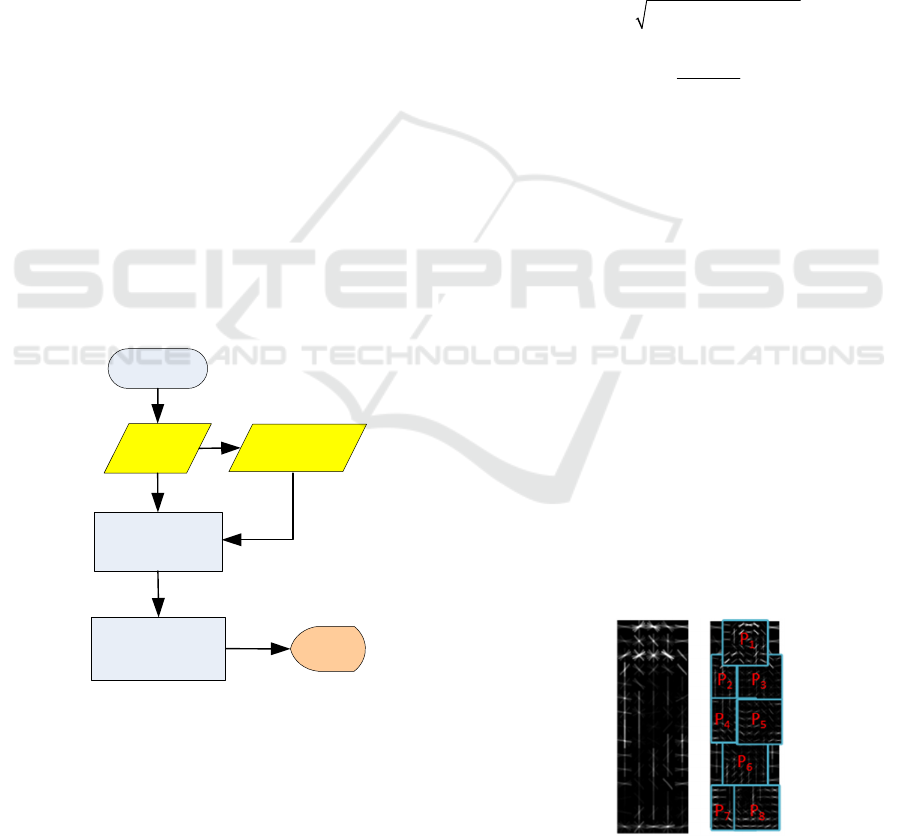
flow of the proposed approach is illustrated in Figure
1.
At first, we collect training images with
pedestrians and compute their transformed responses
as deformable score maps from the DPM inference
procedure. In this study, we use the Caltech
pedestrian dataset to conduct the experiments. Then,
we use the derived deformable score maps as
additional information and feed them into the deep
learning model in the learning stage to have the model
learn the deformable information of a pedestrian.
Start
Caltech
Dataset
Combined Dataset
with Score Maps
Deep Learning
Models
(SSD, Faster R-CNN)
Output
Deformable
Score Maps
Figure 1: Flowchart of the proposed approach.
3.1 An Overview of DPM
The DPM recognizes objects involved with three
major components: a root filter, a group of part filters,
and a scoring mechanism. The root filter defines the
detection window that covers the object to detect. Part
filters are used to define a set of parts for the detected
object. The connection between the root filter and its
associated part filters is evaluated by a scoring
mechanism that quantifies the spatial association with
a deformable cost.
As the DPM learning model is built based on HoG
features, the computation of HoG is the first step to
the DPM inference. Here is the procedure to obtain
HoG features of an image. Suppose that l(x, y) is the
pixel value at location (x, y). The gradient vector of
the pixel (x, y) can be obtained as follows:
,1,1,
x
Gxy lx y lx y
(1)
,,1,1
y
Gxy lxy lxy
(2)
22
,,,
xy
Gxy G xy G xy
(3)
1
,
,y tan
,
y
x
Gxy
x
Gxy
(4)
where G
x
and G
y
are the partial derivatives on the x-
direction and y-direction, respectively. The
magnitude and direction of an image gradient vector
are described in Equations (3) and (4).
Then, we divide the image into 8-by-8 pixel cells,
where the magnitude values are stored cumulatively
and added into nine bins for unsigned angles. Finally,
we slide a block containing the size of 2-by-2 cells
across the whole image. Histograms of the four cells
in each block are concatenated into a vector and
normalized with L2-norm. The HoG features are
obtained by concatenating all the block vectors. As
our target object is a pedestrian, we use eight part
filters as components of a human body as illustrated
in Figure 2.
To detect objects in various scales, we use image
pyramids in four different scales as shown in Figure
3 to obtain a multi-scale DPM to represent the local
shape descriptor generated by combining the
histogram of edge orientations of each cell (Grauman
& Darrell, 2005).
(a) (b)
Figure 2: (a) The root filter and (b) part filters of an upright
pose pedestrian in a DPM model.
Integrating Multiscale Deformable Part Models and Convolutional Networks for Pedestrian Detection
517
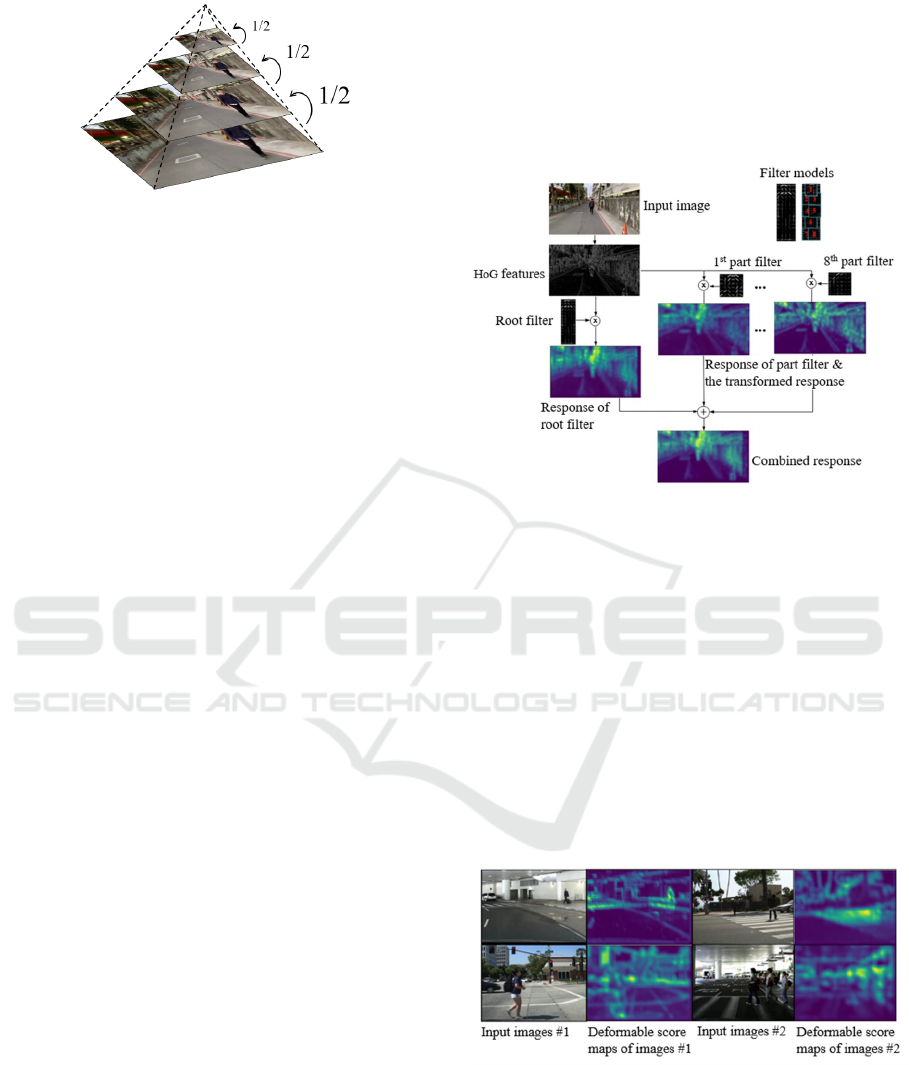
Figure 3: The pyramid of image. The full image resolution
is taken at the bottom level.
3.2 Computation of Deformable Score
Maps
The deformable scores in the DPM provide essential
information for a possible displacement of object
parts. It is beneficial to have this information added
into a deep learning-based object detection models.
The rest of this section describes the computation of
deformable scores.
Suppose that the pedestrian model based on the
DPM structure, M
p
, is described by Equation (5).
p01
, ,....., ,
N
MFP PB
(5)
where F
0
is the root filter, N is the number of part
filter, and B is the bias term. P
i
is used to model part
filters defined by a 5-tuple (F
i
, v
i
, s
i
, a
i
, b
i
). The five
elements of the tuple are listed below,
F
i
: the i-th part filter
v
i
: the box center of the i-th part relative to the root
location
s
i
: the box size
a
i
, b
i
: coefficients of a quadratic function measuring
the deformable score of the i-th part
The response of a filter is computed by taking the
dot product of the filter weights and the features in the
HoG pyramid (Felzenszwalb et al., 2010; Cai, 2018).
The deformable score is given by Equation (6).
00
SCORE , ,
NN
iiidii
ii
F H P d dx dy B
(6)
00
,(,)(2(,))
ii ii i
dx dy x y x y v
(7)
(,,,)
iiiii
dFsab
(8)
22
,,,,
ii
dii ii
dx dy dx dy dx dy
(9)
The first term
,
i
HP
in Equation (6) describes a
sub-window in the HoG pyramid H with the upper left
corner in each part model P
i
, while
,
ii
dx dy
in the
second term describes the displacement of the i-th
part and is defined in Equation (7). Hence, the
deformable score can be expressed in terms of the dot
product between d
i
and
d
defined in Equations (8)
and (9), respectively. Figure 4 illustrates the
procedure of deformable scores computation.
Figure 4: Illustration of computing deformable score maps.
The procedure of computing the deformable score
maps is summarized as follows.
(1) Compute the pyramid of HoG features.
(2) Compute the response of the root filter by filtering
the HoG pyramid features with the root filters
leaned by the latent SVM.
(3) Compute the response of each part filter and the
transformed responses.
(4) Sum up the response from multiple parts to obtain
the combined response as deformable score maps
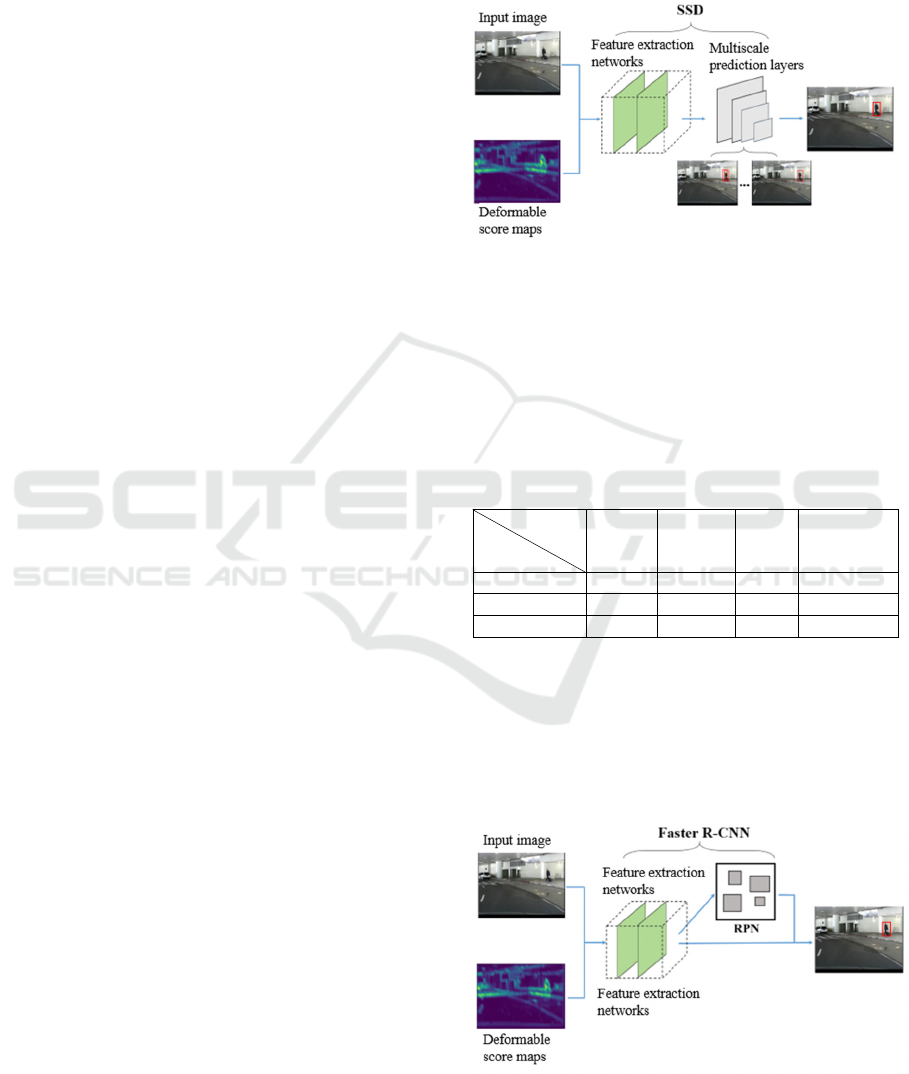
Figure 5 shows sample images from the Caltech
dataset and their corresponding deformable score
maps.
Figure 5: The first and the third columns show sample
images from the Caltech dataset. The second and fourth
columns show the corresponding score maps.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
518
4 EXPERIMENTAL RESULTS
4.1 The Caltech Pedestrian Dataset
In this experiment, we use the Caltech pedestrian
dataset (Dollar et al., 2012) to examine the proposed
approach. The dataset contains videos approximately
10 hours collected from an urban traffic environment.
There are about 2,300 pedestrians and a total of
350,000 bounding boxes labeled. The dataset was
divided into 11 sessions, where six sessions for
training and five sessions for the test.
The pedestrian instances are grouped into three
scales: near (80 pixels or more in height), medium
(30-80 pixels), and far (30 pixels or less). The subset
reasonable in the dataset contains pedestrians that
have 50 pixels or more in height. The training data in
this study contains 128,419 images, while the test
data contains 4,024 images.
In the training stage, we include the deformable
score maps described in Section 3. Note that the
original DPM filter parameters were trained on
PASCAL VOC07. As the VOC07 dataset is lack of
pedestrian samples, we re-trained DPM filter
parameters with the Caltech pedestrian dataset.
4.2 Experimental Setup
We separate color channels of an image and obtain
three corresponding score maps, namely R-score
map, G-score map, and B-score map from R, G, and
B channels, respectively. We conducted experiments
and found that the inclusion of all the three score
maps shows better results compared to the results
derived only from a single channel score map or
without score maps. Therefore, we include all the
score maps derived from three channels in the
training data.
CNN-based object detection models can be
roughly divided into two categories: one-stage and
two-stage frameworks. In order to verify the
effectiveness of the proposed approach, two popular
CNN-based detection models were used, namely SSD
(one-stage model) and Faster R-CNN (two-stage
model). The size of the root filter and part filters is set
to 15×5 and 6×6, respectively throughout the
experiments.
4.2.1 Tested on SSD
SSD is a popular one-stage detection model that has
real-time detection ability without losing its detection
accuracy. Unlike most detectors that run detection on
the top layer of the network, SSD detects different
object scales on different network layers. There are
some variations in SSD. In this experiment, we use
MobileNet-v2 as the lightweight backbone. The
framework of detecting pedestrians is illustrated in
Figure 6.
Figure 6: The framework of detecting pedestrians with
deformable score maps on the SSD architecture.
When evaluating the proposed approach on SSD
models, we observed that the performance in terms of
miss rate is improved among all the pedestrian scales,
as listed in Table 1. It has an improvement of 1.9% of
miss rate in the scale of medium.
Table 1: Comparison of miss rate improvement on SSD
models.
Scale
Models
Far Medium Near Reasonable
SSD 96.0% 83.1% 29.4% 57.7%
Our Approach 95.8% 81.2% 28.8% 56.4%
Improvement 0.2% 1.9% 0.6% 1.3%
4.2.2 Tested on Faster R-CNN
Faster R-CNN is a popular two-stage detection model. We
use ResNet50 as the base network for feature extraction.
The framework of detecting pedestrians with deformable
score maps on the Faster R-CNN architecture is illustrated
in Figure 7.
Figure 7: The framework of detecting pedestrians with
deformable score maps on the Faster R-CNN architecture.
Integrating Multiscale Deformable Part Models and Convolutional Networks for Pedestrian Detection
519
When evaluating the proposed approach on Faster R-
CNN models, we observed that the miss rate is also
improved among all the pedestrian scales, as listed in
Table 2. It has an improvement of 2.7% of miss rate
on the scale of near.
Table 2: Comparison of miss rate improvement on Faster
R-CNN models.
Scale
Models
Far Medium Near Reasonabl
e
Faster R-CNN 93.1% 57.8% 7.1% 25.3%
Our Approach 92.6% 56.8% 4.4% 22.8%
Improvement 1.5% 1.0% 2.7% 2.5%
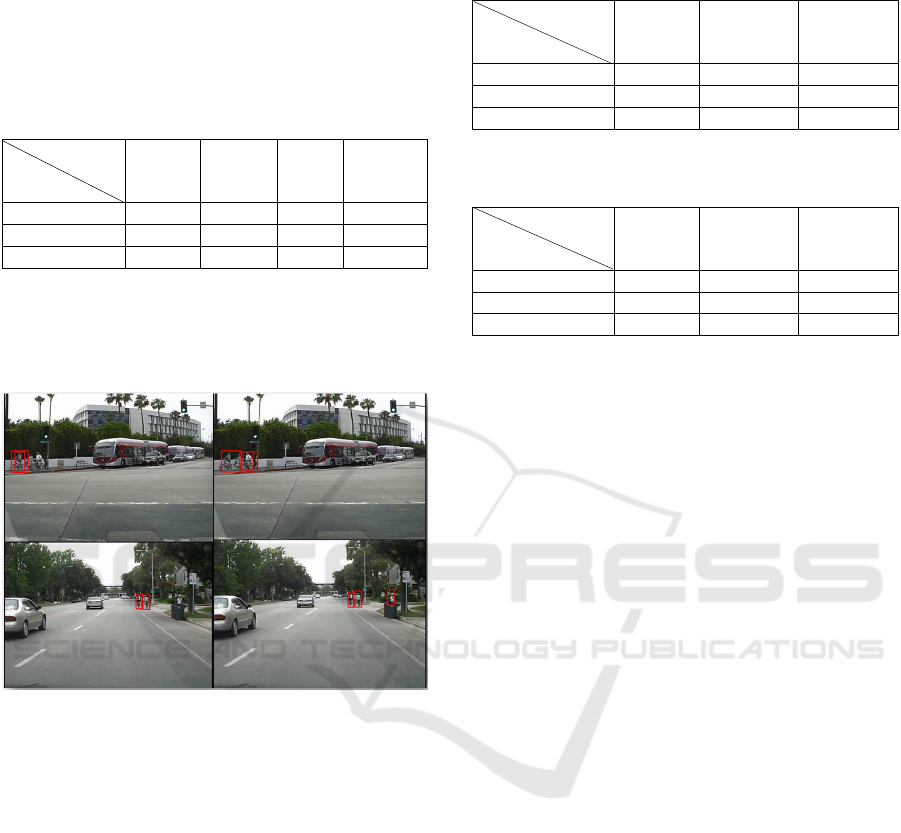
Figure 8 shows examples of detection results. It
can be seen that the proposed approach is able to
detect partially occluded pedestrians that have been
missed in the original Faster R-CNN model.
(a) (b)
Figure 8: Examples of detected results. (a) Detection results
in Faster R-CNN models. (b) Detection results obtained by
the proposed approach.
In order to evaluate the impact of occlusion
percentage on detection accuracy, we further
experiment with more occlusion setups and listed the
results in Table 3 and Table 4 for SSD and Faster R-
CNN, respectively.
From Table 3 and Table 4, it is clear that the
proposed approach can help reduce the miss rate even
in the case of heavy occlusion by providing the
information of deformable scores. The miss rate was
reduced from 1.3% to 2.6% in the Faster R-CNN
architecture and from 1.7% to 2.1% in the SSD
architecture. This is because non-rigid objects can be
spatially organized in a deformable configuration of
parts, and DPM is able to provide information that
helps find partially occluded objects.
Table 3: Comparison of miss rate improvement at different
percentages of occlusion on Faster R-CNN.
Occlusion
Models
25% 50% 75%
Faster R-CNN 20.0% 24.9% 54.2%
Our Approach 17.4% 22.5% 52.9%
Improvement 2.6% 2.5% 1.3%
Table 4: Comparison of miss rate improvement at different
percentages of occlusion on SSD.
Occlusion
Models
25% 50% 75%
SSD 49.9% 57.7% 83.7%
Our Approach 47.8% 56.3% 82%
Improvement 2.1% 1.4% 1.7%
5 CONCLUSIONS
Pedestrian detection is an active research topic for the
automotive and security industries. In this study, we
have demonstrated a simple but effective jointly
learned approach by including the deformable score
maps derived from DPM into deep learning-based
object detection models. The experimental results
tested on the Caltech pedestrian dataset showed that
the proposed approach is able to reduce a miss rate of
2.1% on SSD and 2.6% on Faster R-CNN in the case
of 25% partial occlusion.
ACKNOWLEDGMENTS
This work is supported by the Taiwan Ministry of
Science and Technology (MOST) under Grant No.
MOST 108-2218-E-035-013
REFERENCES
Cai, Y., Liu, Z., Wang, H., Chen, X., & Chen, L. (2018).
vehicle detection by fusing part model learning and
semantic scene information for complex urban
surveillance. Sensors, 18(3505). 1-19.
Cheon, M., Lee, W., Hyun, C. H., & Park, M. (2011).
Rotation invariant histogram of oriented gradients.
International Journal of Fuzzy Logic and Intelligent
Systems, 11(4), 293-298.
Dalal, N., & Triggs, B. (2005). Histograms of oriented
gradients for human detection. Proceedings of the IEEE
Conference on Computer Vision and Pattern.
Recognition.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
520

Dollar, P., Wojek, C., Schiele, B., & Perona, P. (2012).
Pedestrian detection: An evaluation of the state of the
art. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 34(4), 743-761.
Felzenszwalb, P., Girshick, R., McAllester, D., &
Ramanan, D. (2010). Object detection with
discriminatively trained part based models. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, 32(9), 1627-1645.
Felzenszwalb, P., McAllester, D., & Ramanan, D. (2008).
A discriminatively trained, multiscale, deformable part
model. IEEE Conference on Computer Vision and
Pattern Recognition.
Girshick, R. (2015). Fast R-CNN. Proceedings of the IEEE
International Conference on Computer Vision.
Girshick, R., Donahue, J., Darrell, T., & Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. IEEE Conference on
Computer Vision and Pattern Recognition.
Grauman, K., & Darrell, T. (2005). The pyramid match
kernel: discriminative classification with sets of image
features. Proceedings of the Tenth IEEE International
Conference on Computer Vision.
Lin, T., Dollar, P., Girshick, R., He, K., Hariharan, B., &
Belongie, S. (2017). Feature pyramid networks for
object detection. arXiv:1612.03144v2
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., Reed, S.,
Fu, C., Berg, A. (2016). SSD: single shot multibox
detector. Proceedings of the 14th European Conference
on Computer Vision.
Luo, P., Tian, Y., Wang, X., & Tang, X. (2014). Switchable
deep network for pedestrian detection. Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition.
Ortalda, A., Moujahid, A., Hina, M., Soukane, A. &
Ramdane-Cherif, A. (2018). Safe driving mechanism:
detection, recognition and avoidance of road obstacles.
Proceedings of the 10
th
International Joint Conference
on Knowledge Discovery, Knowledge Engineering and
Knowledge Management.
Ouyang, W., & Wang, X. (2012). A discriminative deep
model for pedestrian detection with occlusion handling.
Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition.
Ouyang, W., & Wang, X. (2013). Joint deep learning for
pedestrian detection. Proceedings of the IEEE
International Conference on Computer Vision.
Rasmussen, C., Nasrollahi, K. & Moeslund, T. (2017). R-
FCN object detection ensemble based on object
resolution and image quality. Proceedings of the 9
th
International Joint Conference on Computational
Intelligence.
Redmon, J., Divvala, S., Girshick, R., & Farhadi. A. (2016).
You only look once: unified, real-time object detection.
Proceedings of the IEEE Conference on Computer
Vision and Pattern. Recognition.
Redmon, J., & Farhadi, A. (2018). YOLOv3: An
incremental improvement. arXiv:1804.02767v1
Ren, S., He, K., Girshick, R., & Sun, J. (2015). Faster R-
CNN: Towards real-time object detection with region
proposal networks. Advances in Neural Information
Processing Systems.
Schnürle, S., Pouly, M., vor der Brück, T., Navarini, A. &
Koller, T. (2017). On using support vector machines for
the detection and quantification of hand eczema.
Proceedings of the 9th International Conference on
Agents and Artificial Intelligence.
Sermanet, P., Kavukcuoglu, K., Pedestrian, S., & LeCun,
Y. (2013). Pedestrian detection with unsupervised
multi-stage feature learning. Proceedings of the IEEE
Conference on Computer Vision and Pattern.
Recognition.
Viola, P., & Jones, M. (2001). Rapid object detection using
a boosted cascade of simple features, Proceedings of
the IEEE Conference on Computer Vision and Pattern.
Recognition.
Viola, P., Jones, M. J., & Snow, D. (2003). Detecting
pedestrians using patterns of motion and appearance.
Proceedings of the Ninth IEEE International
Conference on Computer Vision.
World Health Organization. (2013). More than 270 000
pedestrians killed on roads each year. Retrieved Oct.
2019 from https://www.who.int/mediacentre/news/
notes/2013/make_walking_safe_20130502/en/
Zhang, C. & Kim, J. (2018). Multi-scale spatial context
features using 3-d recurrent neural networks for
pedestrian detection. Proceedings of the 21
st
International Conference on Intelligent Transportation
Systems.
Zhao, Z. Q., Zheng, P., Xu, S. T., & Wu, X. (2019). Object
detection with deep learning: a review. IEEE Trans. On
Neural Networks and Learning Systems, 30(11), 3212-
3232.
Integrating Multiscale Deformable Part Models and Convolutional Networks for Pedestrian Detection
521
