
Ad Hoc Communication Topology Switching during Disasters
from Altruistic to Individualistic and Back
Indushree Banerjee, Martijn Warnier and Frances Brazier
Faculty of Technology Policy and Management, Systems Engineering and Simulations,
Delft University of Technology, Delft, The Netherlands
Keywords:
Ad Hoc Communication Networks, Disaster Management, Topology Switching, Autonomous Computing.
Abstract:
Disaster communication has made immense progress in the last thirty years. At present, disaster research fo-
cuses on bottom-up approaches such as civilian inclusion in disaster response. With the advent of smartphones,
citizen-based emergency communication has become possible. Present ad hoc communication technologies
typically form a fully connected mesh network, which connects all phones that are within each other’s trans-
mission range. This facilitates low-latency direct communication between citizens, but it quickly drains the
battery of phones. Alternative ad hoc communication networks form an adaptive energy-efficient network
topology, that is most draining to batteries of phones that have a higher charge, while low-energy phones
are spared from relaying messages, thereby preserving battery and thus maintaining their connection with the
rescue communication network. Both of these approaches have their own advantages. Which one is best
for communication needs depends on the context. This position paper discusses the possibility of a decision
model as an approach to automatically switch between the two alternative ad hoc communication networks.
This ensures that citizens in disasters can make use of the optimal communication system at all times.
1 INTRODUCTION
To enhance societal resilience against disasters, col-
lective participation of citizens in a timely and in-
formed manner must be incorporated (Comfort and
Haase, 2006; Comfort et al., 2010). One way of facil-
itating citizen autonomy is to design emergency com-
munication services with existing tools such as smart-
phones that can provide continuous access to informa-
tion (Maryam et al., 2016; Kumbhar et al., 2016).
To form a mobile ad hoc communication net-
work (MANET) smartphones use their inbuilt WiFi or
Bluetooth to connect with other devices in their prox-
imity or transmission range to exchange messages in a
peer-to-peer mode, forming communication networks
on-the-fly (Wang et al., 2017; Raffelsberger and Hell-
wagner, 2013). Ad hoc networks such as MANETs
(Mobile Ad Hoc Networks) have two main topologies
for their underlying connectivity: full mesh or scale-
free.
The topology of a network determines the pat-
tern of connectivity between nodes to form connec-
tions. In a full mesh topology, nodes within trans-
mission range of each other form a direct point-to-
point connection. This leads to a fully connected net-
work such that every node in the transmission range
gets connected and as they move around they make
more connections dynamically. If the sender and
the receiver are not in direct contact, there are al-
ways relaying nodes that can pass the message to the
intended destination. Applications such as Firechat
(Lin et al., 2015), ServalMesh (Lieser et al., 2017),
HelpMe (Mokryn et al., 2012) follow this topology
and are promoted as solutions to disaster emergency
communications.
The performance of the network depends on the
chosen topology, and each topology has its own ben-
efit. A full mesh topology provides more connectiv-
ity and reliability due to redundant routes. However,
scaling a full mesh topology is a challenge. Addition-
ally, a full mesh topology can lead to extreme battery
drainage of participating nodes due to high connec-
tion costs.
Alternatively in a scale-free network topology,
like the recently developed SOS (Banerjee et al.,
2020), delay and latency can be very high. There-
fore, to cater to a specific requirement, the topology
is predetermined for a specific application.
For example, for a sparsely populated area, a
scale-free network topology is preferred. However,
Banerjee, I., Warnier, M. and Brazier, F.
Ad Hoc Communication Topology Switching during Disasters from Altruistic to Individualistic and Back.
DOI: 10.5220/0009434201030107
In Proceedings of the 5th International Conference on Complexity, Future Information Systems and Risk (COMPLEXIS 2020), pages 103-107
ISBN: 978-989-758-427-5
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
103
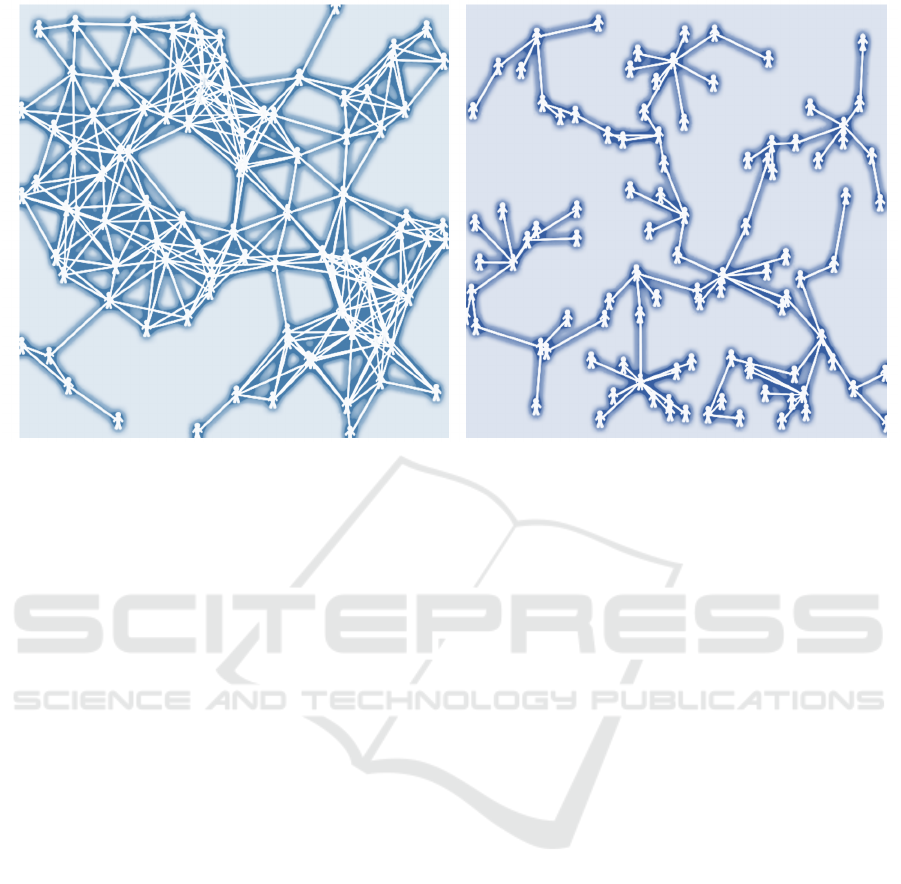
Figure 1: This figure represents two different topologies. On the left a full mesh topology is represented (individualistic
topology) and on the right a scale-free network topology is illustrated (altruistic).
for a densely populated area a full mesh topology is
chosen.
In addition to density and mobility, there are many
other factors that play a role in maintaining connec-
tivity, such as available resources, whether charging
facilities are available, context and social information
or relationships (Jedari et al., 2018). This can lead
to non-cooperative behaviour among relaying nodes.
Based on the behaviour of nodes, literature (Jedari
et al., 2018) classifies mobile nodes in three main cat-
egories,
• selfish
• cooperative, and
• malicious nodes.
Malicious nodes are out of the scope of this paper.
This paper mainly focuses on selfish node behaviour
and cooperative node behaviour.
A selfish node can on purpose drop messages ei-
ther to save resources, decline to connect due to pri-
vacy issues and may have social biases before joining
an ad hoc network in a community. This can limit the
coverage area and scaling of the network, while low-
ering reliability of message delivery due to network
segmentation.
Therefore, there is a need for networks to be
able to switch between topologies depending on the
spatial-temporal-resource context.
This paper addresses these criteria required for a
decision model that generates a self-organised topol-
ogy with respect to spatial-temporal-resource context.
The purpose is to switch between two main topolo-
gies, namely individualistic and altruistic.
In this paper a full mesh topology is called an in-
dividualistic topology since it forms connections and
routes data without consideration for other nodes in
the network. As represented on the left panel of fig-
ure 1, each node connects with every other node in its
proximity or transmission range and communicates
without any consideration of relaying nodes.
During disaster where there is continued uncer-
tainty of available resources and need of continued
access, it is very possible that nodes demonstrate self-
ish behaviour and behave more individualistically.
At present three main categories of incentive
mechanisms are present that promote co-operative be-
haviour. Specific to disaster scenarios are reputation-
based, credit-based and tit-for-tat-based (Gupta et al.,
2014; Radenkovic et al., 2018; Asuquo et al., 2016).
However, these mechanisms mainly focus on data
routing and not topology creation.
Therefore, this paper defines a scale-free network
as an altruistic topology that forms an ad hoc net-
work while considering node limitations in terms of
resources. The right panel of Figure 1 shows the for-
mation of an altruistic network that promotes equal
participation of nodes to avoid low-energy nodes for
relaying, thus preventing selfish behaviour.
During disasters, an effective response is highly
dependent upon the ability of a system to sustain
dynamic changes. Systems must be modeled with
the consideration of dynamic context, while updating
information and a continued access to information,
COMPLEXIS 2020 - 5th International Conference on Complexity, Future Information Systems and Risk
104
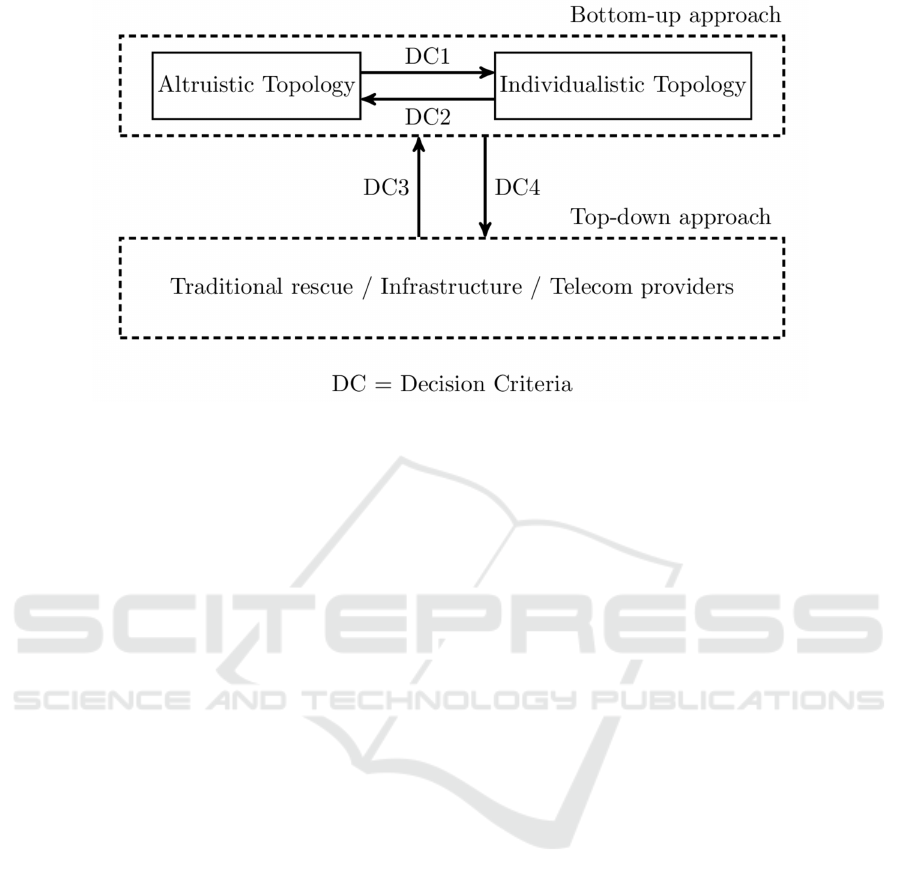
Figure 2: Decision model framework.
therefore, the decision model must allow switching
between these two connection topologies.
2 DECISION MODEL AND
DECISION CRITERIA
The switching can be determined by various factors
such as the density of nodes, mobility of nodes, avail-
ability of resources such as charging facilities, social
participation, inclusion of traditional rescue among
others.
Access to updated information needs to be con-
tinuous and thus a smooth automatic transition that
avoids discontinued communication service is very
necessary.
The first transition takes place in the immedi-
ate aftermath of a disaster, i.e. when infrastructures
are unavailable, services switch to a bottom-up ap-
proach. This transition is reversed when infrastructure
is either restored or traditional rescue brings equip-
ment such as unmanned aerial vehicles or WiFi ac-
cess points to re-establish communication and install
a top-down approach.
The second transition takes place between topolo-
gies catering to bottom-up approaches, between altru-
istic and individualistic topologies. This framework is
represented in figure 2.
2.1 The Decision Tree
This section presents an example of decision trees that
determine when to switch between the two types of
topologies in the bottom-up approach. The decision
is based on three factors:
1. charge of the participating nodes,
2. node density, and
3. number of messages being exchanged.
First, charge of the participating nodes is central in
deciding which topology to use, since node partici-
pation is a top priority. If the charge of participating
nodes is low, low energy nodes start running out of
battery, and stop participating.
Second, node density determines how many nodes
are in transmission range, and therefore determines
how many connections need to be made. Getting con-
nected is an expensive process. If there are many
nodes in range, and every node connects to all nodes
in range, this drains the battery quickly, and will in
the end not be efficient.
Third, if the number of messages being sent is
high, then a topology that relies on nodes relaying
messages via many intermediate nodes will drain bat-
tery quickly, and will not be efficient.
In the proposed decision models, this last factor is
not included, because it is not a top priority and the
decision model should be simple to conserve energy
in computation.
In the decision model, a number of criteria are
formulated for evaluating whether a node can best
switch to a different type of topology, or best stays
with the present topology in use. These decision
models are not mirror images: Once an altruistic
topology is in place, the threshold should be high to
switch to an individualistic topology.
Ad Hoc Communication Topology Switching during Disasters from Altruistic to Individualistic and Back
105
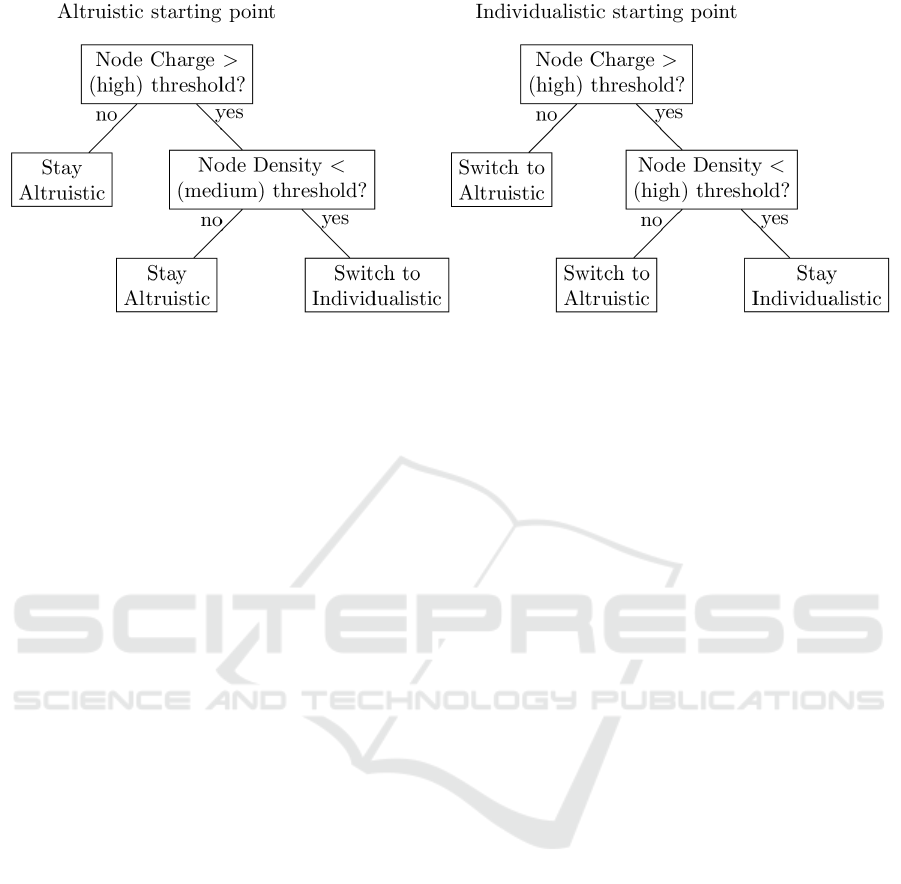
Figure 3: Decision tree for switching between altruistic to individualistic and back.
The decisions as represented in figure 3 are followed
at the level of individual nodes: Every node decides
for itself whether it will switch to the different topol-
ogy, and although this decision is shared with the sur-
rounding nodes, it will only affect the connections of
this node.
Therefore, the topology of the whole network can
be a hybrid between the two types of topologies, with
some areas or some subsets of nodes following the in-
dividualistic topology, and other areas or subsets of
nodes following the altruistic topology. The decisions
are all dichotomized using thresholds, to keep com-
putations simple and low in energy consumption, as
they need to be performed by each individual phone
at regular intervals.
The switching is performed by adaptive self-
organisation that follows the principles of Autonomic
computing (Brazier et al., 2009). Autonomic com-
puting has been used for designing complex system
through self-organisation and self-management of in-
dividual entities participating in forming the system
without human intervention.
The process involves each entity monitoring the
environment to acquire context information, analyz-
ing the information to gather perspective, planning
based on the analyses and finally executing the de-
cision. The same decision criteria will be followed by
each node.
In the ad hoc networks, participating nodes are not
aware of the context and their own limitations at the
beginning as they join the network. As the network
formation begins and the number of nodes participat-
ing increases, the context changes and thus they need
to change their connectivity pattern to maintain com-
munication and coverage.
The approach includes setting thresholds for var-
ious decision criteria. In the extended version of this
paper, the algorithms for switching will be extended.
3 CONCLUSION
In conclusion this paper presents the conceptual
framework of a decision model that allows topol-
ogy switching using autonomic computing and self-
organisation for emergency communications in the af-
termath of a disaster.
The purpose is to allow smooth transition of dif-
ferent connectivity patterns that allows human col-
lective intelligence to be utilized via technical means
to support its society in complex, dynamic environ-
ments. An adaptive system capable of facilitating
communication between affected citizens provides
citizens the autonomy to help themselves.
REFERENCES
Asuquo, P., Cruickshank, H., Ogah, C. P. A., Lei, A.,
and Sun, Z. (2016). A collaborative trust manage-
ment scheme for emergency communication using de-
lay tolerant networks. In 2016 8th Advanced Satel-
lite Multimedia Systems Conference and the 14th Sig-
nal Processing for Space Communications Workshop
(ASMS/SPSC), pages 1–6. IEEE.
Banerjee, I., Warnier, M., and Brazier, F. M. T. (2020).
Self-organizing topology for energy-efficient ad-hoc
communication networks of mobile devices. Complex
Adaptive Systems Modeling. Journal article under re-
view (preprint available online).
Brazier, F. M., Kephart, J. O., Parunak, H. V. D., and Huhns,
M. N. (2009). Agents and service-oriented computing
for autonomic computing: A research agenda. IEEE
Internet Computing, 13(3):82–87.
Comfort, L. K. and Haase, T. W. (2006). Communication,
coherence, and collective action: The impact of hurri-
COMPLEXIS 2020 - 5th International Conference on Complexity, Future Information Systems and Risk
106

cane katrina on communications infrastructure. Public
Works Management & Policy, 10(4):328–343.
Comfort, L. K., Oh, N., Ertan, G., and Scheinert, S. (2010).
Designing adaptive systems for disaster mitigation
and response. Designing resilience: Preparing for ex-
treme events, pages 33–62.
Gupta, A. K., Bhattacharya, I., Banerjee, P. S., and Mandal,
J. K. (2014). A co-operative approach to thwart selfish
and black-hole attacks in dtn for post disaster scenario.
In 2014 Fourth International Conference of Emerging
Applications of Information Technology, pages 113–
118. IEEE.
Jedari, B., Xia, F., and Ning, Z. (2018). A survey on human-
centric communications in non-cooperative wireless
relay networks. IEEE Communications Surveys & Tu-
torials, 20(2):914–944.
Kumbhar, A., Koohifar, F., G
¨
uvenc¸, I., and Mueller, B.
(2016). A survey on legacy and emerging technolo-
gies for public safety communications. IEEE Com-
munications Surveys & Tutorials, 19(1):97–124.
Lieser, P., Alvarez, F., Gardner-Stephen, P., Hollick, M.,
and Boehnstedt, D. (2017). Architecture for respon-
sive emergency communications networks. In 2017
IEEE Global Humanitarian Technology Conference
(GHTC), pages 1–9. IEEE.
Lin, W. Y., Hsueh, K.-P., and Pa, P.-S. (2015). The de-
velopment of emergency communication app using ad
hoc network with ipv6. In 2015 International Confer-
ence on Intelligent Information Hiding and Multime-
dia Signal Processing (IIH-MSP), pages 41–44. IEEE.
Maryam, H., Shah, M. A., Javaid, Q., and Kamran, M.
(2016). A survey on smartphones systems for emer-
gency management (spsem). International Journal
of Advanced Computer Science and Applications,
7(6):301–311.
Mokryn, O., Karmi, D., Elkayam, A., and Teller, T. (2012).
Help me: Opportunistic smart rescue application and
system. In 2012 The 11th Annual Mediterranean Ad
Hoc Networking Workshop (Med-Hoc-Net), pages 98–
105. IEEE.
Radenkovic, M., Walker, A., and Bai, L. (2018). To-
wards better understanding the challenges of reliable
and trust-aware critical communications in the after-
math of disaster. In 2018 14th International Wire-
less Communications & Mobile Computing Confer-
ence (IWCMC), pages 648–653. IEEE.
Raffelsberger, C. and Hellwagner, H. (2013). A hybrid
manet-dtn routing scheme for emergency response
scenarios. In 2013 IEEE international conference on
pervasive computing and communications workshops
(PERCOM workshops), pages 505–510. IEEE.
Wang, Y., Wei, L., Vasilakos, A. V., and Jin, Q. (2017).
Device-to-device based mobile social networking in
proximity (msnp) on smartphones: Framework, chal-
lenges and prototype. Future Generation Computer
Systems, 74:241–253.
Ad Hoc Communication Topology Switching during Disasters from Altruistic to Individualistic and Back
107
