
A Visual Analytics System for Processed Videos from Traffic
Intersections
Ke Chen, Tania Banerjee, Xiaohui Huang, Anand Rangarajan and Sanjay Ranka
CISE, University of Florida, Gainesville, Florida, U.S.A.
Keywords:
Visual Analytics, Intersection Traffic Analysis, Trajectory Analysis, Anomaly Detection.
Abstract:
Traffic intersections are the most crucial areas that determine the efficiency of a road network. With the
advances in technology, it is now possible to gather real-time data on the performance of an intersection and
identify potential inefficiencies. The goal of our work is to develop a visual analytics framework based on
videos collected at an intersection using fisheye cameras. The software developed as part of this work is
described in detail, along with its utility and usability. The software may be used to filter and display tracks
and sort them based on the most frequent signaling phases encountered at an intersection. The software may
be used to study anomalous trajectories, such as those that have unusual shapes and those that occur at times
that violate the ongoing signal phase. While being useful for analyzing the trajectories at an intersection, the
software is also convenient for developers seeking to validate algorithms for the trajectory generation process,
object classification, preprocessing, and clustering trajectories.
1 INTRODUCTION
Visual analytics, aided by interactive visual inter-
faces, help users gain deeper insights into their data
and thereby leads to better decision making. In this
paper, we describe a system to filter, analyze, and
display trajectories of vehicles and pedestrians pass-
ing through a traffic intersection. The trajectories are
generated using a fisheye camera installed at the inter-
section. The camera captures a video of the intersec-
tion. It transmits it to an edge-based GPU processor
for applying image processing techniques to convert
the video to timestamped 2D location coordinates of
objects (vehicles, pedestrians, bicyclists). The gener-
ated trajectories are transmitted from the edge system
to a cloud-based system for further processing and
storage. The image processing techniques leverage
state of the art in computer vision and machine learn-
ing while performing object tracking and pedestrian
monitoring at intersections, with the eventual goal of
making the intersection safer and incident-free. The
real-time trajectories, along with the current signaling
state of the intersection, provide us valuable insights
into any observed abnormal behaviors such as high
propensities of signal light violations and risky ma-
neuvers.
The number of trajectories at a given intersection
depends on the amount of traffic. For a moderately
busy intersection that we studied, there are several
thousands of trajectories that are generated for any
given day. This extrapolates to more than a million
trajectories per year. Thus, a visualization system is
essential for understanding traffic behavior at a given
intersection in a specific period. A key goal of our
visual analytics software is to allow the user to ex-
plore the vast database of trajectories and associated
properties. Our system is expected to improve traffic
efficiency and safety at an intersection by highlight-
ing anomalous behaviors so that traffic engineers can
address them.
The main contributions of our work presented in
this paper are summarized below.
1. We developed a novel visual analytics tool for an-
alyzing traffic at an intersection. The tool gives
the user flexibility to filter trajectories based on
the signaling phases of an intersection.
2. We show that using powerful clustering algo-
rithms that segment the trajectories based on ob-
ject type as well as path traversed, results in in-
teresting visualization-based insights of traffic be-
havior in terms normal and safe versus rare and
accident-prone.
3. We showcase the utility of the visualization soft-
ware by performing traffic analysis to get insights
into key trends at an intersection.
The rest of the paper is organized as follows. Sec-
tion 2 presents the related work in this area while Sec-
68
Chen, K., Banerjee, T., Huang, X., Rangarajan, A. and Ranka, S.
A Visual Analytics System for Processed Videos from Traffic Intersections.
DOI: 10.5220/0009422300680077
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 68-77
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tion 3 presents the back end of our visual analytics
framework briefly to motivate the application. Sec-
tion 4 presents the steps and methods for trajectory
generation and processing. Section 5 presents the de-
sign of the graphical user interface (GUI). We finally
conclude in Section 6.
2 RELATED WORK
There has been prior research in the field of trajec-
tory analysis for vehicle and pedestrian trajectories,
but only a few of these have developed a visual ana-
lytics framework. For example, Sha et al. (Sha et al.,
2011) used laser data to perform trajectory analysis of
moving objects at an intersection. Xu et al. (Xu et al.,
2015) performed the clustering of the trajectories at
an intersection. While the authors in (Xu et al., 2015)
and (Sha et al., 2011) developed trajectory analysis al-
gorithms, they have not developed a visual analytics
software. In the rest of this section, we present exist-
ing work in trajectory analysis that also have a visual
analytics system.
Dohuki et al. (AL-Dohuki et al., 2019) have de-
veloped an open source visual analytics software, Tra-
jAnalytics, for exploring urban trajectories that per-
forms the tasks of modeling, transformation, and vi-
sualization of urban trajectory data. The goal of the
software is to allow stakeholders to have an under-
standing of the the population mobility data of the
city. A fundamental difference of this work and that
of ours is that in the former, the authors capture and
analyze the whole trajectory of vehicles or humans
through the road network of a city. In our case, we
focus only on the trajectories that appear at traffic in-
tersections.
Kim et al. (Kim et al., 2017) presented a vi-
sual analysis tool for exploring trajectories. Their
visual analytics workflow consists of steps such as
map view, trajectory view, analysis view, and time-
line view. The authors provide a way for the user to
filter areas of interest in the map view, generate the
trajectories of interest, and study the timeline of these
trajectories. This work focuses on entire trajectories,
and, hence, their metrics of interest are different than
ours.
3 BACKGROUND
In this section, we present some preliminary back-
ground of video processing, a fundamental compo-
nent for trajectory generation. Figure 1 demonstrates
the overall pipeline. First, we take the raw fisheye
video as input and perform video processing using
computer vision techniques for detecting and track-
ing road objects (cars, pedestrians, etc.). Then, we
process and cluster trajectories for final visualization
purposes.
3.1 Video Analysis
The raw video that is an input to our software is cap-
tured using fisheye cameras installed at traffic inter-
sections. Compared to an ordinary video camera, a
fisheye camera can capture the whole intersection in
a wide panoramic and non-rectilinear image using its
wide-angled fisheye lens. Fisheye cameras are advan-
tageous because a single camera can capture a com-
plete view of the entire intersection. If the intersec-
tion is large, two fisheye cameras may be installed to
capture the complete intersection.
Processing the video obtained from a fisheye cam-
era enables us to create trajectories of moving objects
at an intersection. A trajectory of a moving object is
its path represented by timestamped location coordi-
nates of the object. For a typical, moderately busy
intersection we studied, the volume of traffic is enor-
mous, with over 10,000 trajectories being generated
on a weekday. Thus, a visualization system is critical
to understand the traffic behavior for a given intersec-
tion for a specific period. For privacy protection, the
information about the moving object is automatically
anonymized by saving only the location coordinates
of objects and, in the cases of vehicles, their size and
color to our database.
Video processing generates frame-by-frame de-
tection and tracking of all the moving objects in an
intersection. It also uses a temporal superpixel (su-
pervoxel) method (Huang et al., 2018) to extract an
accurate mask for object representation. These can
be converted into trajectories that represent the spa-
tial and temporal movement of traffic. A trajectory is
a path traversed by a moving object that is represented
as successive spatial coordinates and corresponding
timestamps. Details of the video processing and anal-
ysis are described briefly below and provided in detail
in (Huang et al., 2020b).
3.2 Description of Database
The trajectories generated by video processing are up-
loaded in a MySQL database on the cloud. SPaT (Sig-
nal Phase and Timing) information is extracted from
high-resolution controller logs and stored is a sepa-
rate database as well. Figure 6 presents the key at-
tributes. The fields of a single row in TrackInfo are -
frame id, identifies the current video frame, track id
A Visual Analytics System for Processed Videos from Traffic Intersections
69

Figure 1: An overview of the pipeline consisting of video processing and multi-object tracking for trajectory generation
followed by post processing and fusion with SPaT data and finally visualization.
Figure 2: Signal phases for pedestrian and vehicle move-
ments (US Department of Transportation, 2008)). The solid
gray arrows show vehicle movements while the blue dotted
arrows show pedestrian movements.
which identifies a trajectory, x and y are the coordi-
nates of the object location, w and h are the width
and height of the bounding box enclosing the ob-
ject, intersection id identifies the intersection, date
and time represent the timestamp. Similarly, the fields
for SPaT include intersection
id, timestamp, and the
phase encoded in hexadecimal format, as well as the
cycle number, with respect to the first observation.
The camera id is an extra field for later use. It is pos-
sible to derive additional information such as class or
type of object (car, bus, truck, motorbike, pedestrian),
speed, cluster and SPaT information for that times-
tamp.
4 TRAJECTORY PROCESSING
In this section, we present the steps and methods for
trajectory generation and processing. First, for lower
computation cost, we process each trajectory to elim-
inate redundant coordinates. Then, we integrate the
signal timing data into track data, where signal timing
data can provide additional cues for trajectory analy-
sis. Finally, we use an unsupervised approach to clus-
ter the trajectories that can be used for mining.
4.1 Trajectory Preprocessing
We reduce the number of coordinates in each trajec-
tory with minimal loss of information, which is done
in a top-down manner using the Douglas-Peucker al-
gorithm, also known as the iterative end-point fit al-
gorithm (Douglas and Peucker, 1973), (Ramer, 1972).
For a given trajectory T, the Douglas-Peucker algo-
rithm finds another trajectory, T
0
, with fewer coordi-
nates, such that the maximum distance between T and
T
0
is below a certain threshold, ε, as specified by a
user.
4.2 Fusion with Signal Timing
Trajectories at intersections are dictated by the ongo-
ing signaling status at an intersection. With the avail-
ability of advanced controllers that can record signal
changes and detector events at a very high resolution
(10 Hz), it is possible to generate a signal phase and
timing log for the intersection for a given period. Fig-
ure 2 shows the phase numbers as they are related to
pedestrian and vehicle movements on the major and
minor streets.
For vehicle movements, there are eight phases,
as shown in Figure 2. A signal phase and timing
(SPaT) system record the state of each phase in terms
of red, yellow, or green light at a certain frequency. In
our application, we record SPaT messages from high-
resolution data on a decisecond basis (10 Hz), using
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
70
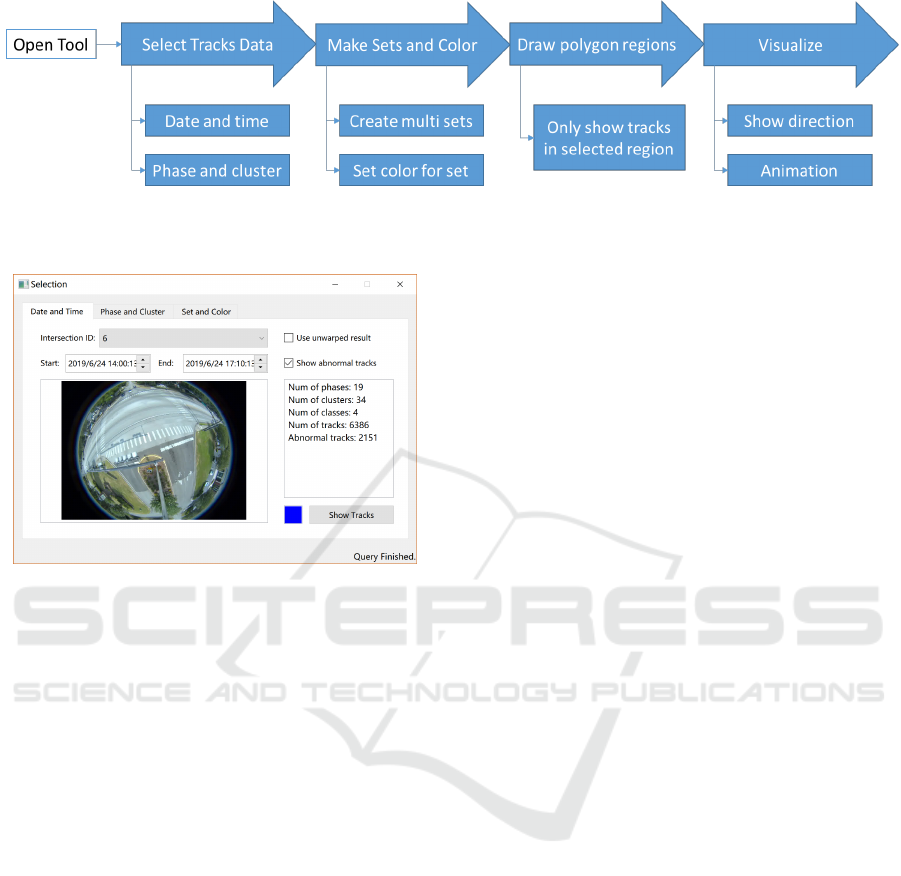
Figure 3: Illustration of the main steps to use the visualization tool. These are firstly selecting the intersection and date range,
creating sets of tracks to be visualized, drawing a polygon of interesting regions and finally, visualizing the results.
Figure 4: Date and time tab on the main selection window
for trajectory analysis.
a 24-bit binary number and its hexadecimal equiva-
lent. Out of the 24 bits, the first, second, and third of
the eight bits are reserved for recording green, yellow,
and red status, respectively. For example, if phases 2
and 6 are green, and every other signal is red, then,
the 24-bit signal state is 0100 0100 0000 0000 1011
1011. The equivalent hexadecimal representation is
4400bb.
The availability of video data along with high-
resolution controller data enables us to place the tra-
jectories from video data in the context of the signal
phases. As we get a new video, one of the first tasks
is to synchronize the beginning of the video with the
timestamp on the controller logs, which can be done
automatically with the help of this tool, the details of
which are presented later in the paper. After synchro-
nizing the beginning of the video with the correspond-
ing timestamp on the SPaT data, we join the SPaT
data with the trajectory data based on the timestamp
for each of the remaining frames.
4.3 Clustering Trajectories
Distance and Similarity of Trajectories. We com-
pute the distance between two trajectories using Fast-
DTW (Salvador and Chan, 2004) and a method that
computes the area between corresponding points in
two trajectories. FastDTW is an approximation of the
Dynamic Time Warping algorithm used to find the op-
timal alignment between two time series with near-
linear time and space complexity. It is appropriate
to apply it to find the spatial distance between trajec-
tories because objects are traversing their respective
trajectories at different speeds.
Clustering. We have developed a variation of the
K-means algorithm for clustering and over-cluster to
ensure that the clusters generated have high similar-
ity (Banerjee et al., 2020), (Banerjee et al., 2019). A
post-processing step is often needed to merge these
clusters as multiple clusters created for the same
movement. This happens because trajectories some-
times can be truncated early or may start late due to
occlusion on the scene.
A post-processing step is often needed to merge
the clusters because there are often multiple clusters
created for the same movement, which happens be-
cause trajectories sometimes can be truncated early
or may start late due to occlusion on the scene. So,
following the K-means clustering, we apply a post-
processing step where the clusters that are part of the
same movement are merged.
5 VISUALIZATION
Our visualization software is based on Qt, which is
an open-source, widget-based, cross-platform appli-
cation development framework implemented in C++.
Qt is widely used for the development of graphical
user interfaces. Figure 3 illustrates the main steps
of using the visualization tool. Figure 4 shows the
main window of the application which contains three
tabs that facilitate the trajectory selection process, and
each is described in detail in the following subsec-
tions.
A Visual Analytics System for Processed Videos from Traffic Intersections
71
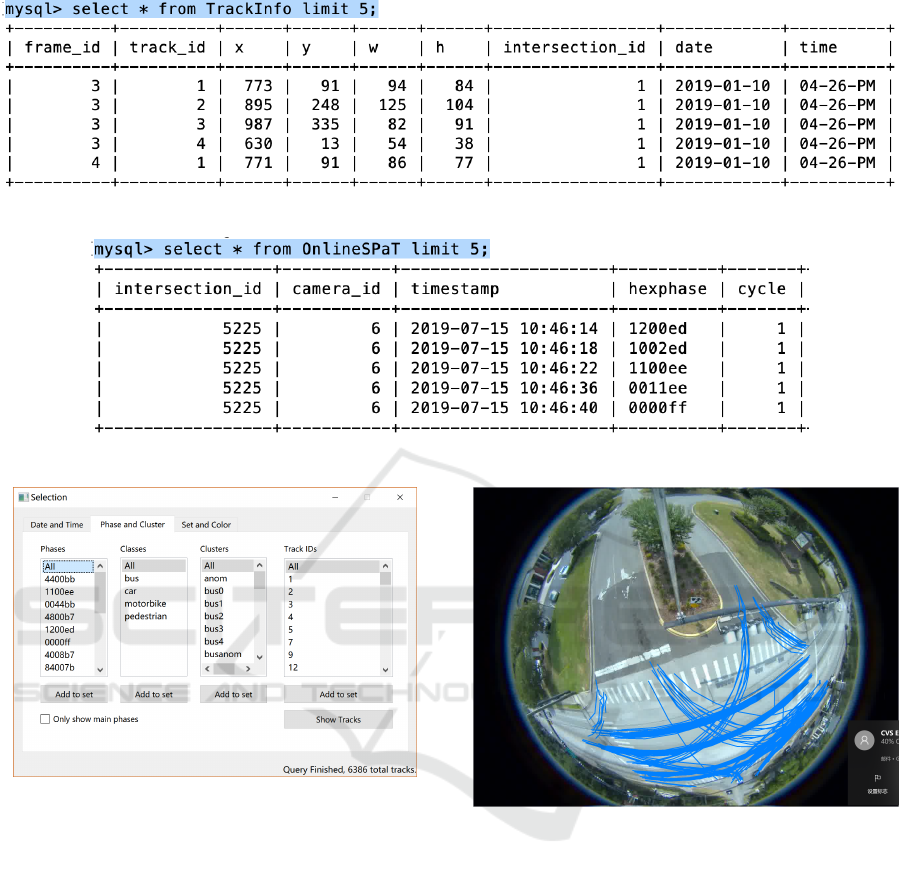
Figure 5: MySQL databases of trajectories generated by video processing.
Figure 6: MySQL databases of SPaT information generated from ATSPM.
Figure 7: Phase and cluster tab on the main selection win-
dow for trajectory analysis.
5.1 Selecting Trajectories
Trajectories may be selected by specifying a time
range, and also by applying the phase and cluster fil-
ters. Once the selection is complete, queried trajecto-
ries are ready to be visualized.
5.1.1 Selection based on Time Range
The first tab in the main window, titled “Date and
Time,” lets the user choose the intersection of inter-
est and the start and end timestamps that contain date
and time values. The software issues a query directly
to the trajectory database on the cloud to retrieve the
trajectories that occurred during the specified time
frame. The panel on the right-hand side gives a sum-
mary of the retrieved data in terms of the number of
Figure 8: “Show Tracks” button is used here to show all
tracks selected using the Phase and Cluster tab.
phases, clusters, classes, and tracks. Phases represent
the number of unique occurrences of signal states in
the signal phase and timing (SPaT) data, while clus-
ters and classes are respectively the total numbers of
different clusters of trajectories and the classes of ob-
jects, such as pedestrians, cars, buses, motorbikes.
The number of “tracks” and “abnormal tracks” are
counts of the total number of trajectories that happen
in the selected time period and the total number of
abnormal trajectories, respectively. Trajectories are
categorized as abnormal if they are tiny, which is an
artifact of video processing and happens when objects
overlap, resulting in occlusion. Also categorized as
abnormal are trajectories that have abnormal shapes
and hence are not a part of the major clusters and
those that occur at times not legally valid.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
72

Figure 9: A red polygon is set up here. The coordinates
of the polygon appears in the command window and these
may be used for example, to limit trajectories only in the
interesting regions.
The user also has an option to either display the
abnormal paths or ignore them and an option to vi-
sualize the original trajectories. The original version
plots the trajectories on the background of a fisheye
image and is in spherical coordinates. At the bottom
right of the main window, an update is posted after the
query is finished, along with the number of tracks.
5.1.2 Selection based on Phase and Cluster
The phase and cluster tab in our software (Figure 7)
helps user select and visualize the ongoing phase and
cluster information which in turn is helpful to group
the trajectories based on the phases in which they oc-
cur, their classes, the cluster they belong to, or just
by their track identifiers. The ongoing status of the
signals at an intersection largely determines the tra-
jectories at an intersection.
The phases are sorted in decreasing order of fre-
quency of occurrence. A check box is available
which, when selected, shows the top nine phase en-
tries. Thus, the check box may be used to see the
signal phases that are most prominent in the signal
timing plan. The groups of trajectories may be se-
lected, and the “Add to set” button, corresponding to
the last level of selection (going from left to right),
maybe clicked to create a set of trajectories based on
the selection. It is possible to create multiple sets cor-
responding to different selections. To check that the
desired tracks are included in a set, the user can click
on the “Show Tracks” button to display the selected
tracks. The tracks selected in Figure 8 occur during
the first 10 minutes of the start of a video. Thus, the
phase and cluster tab allow the user to filter and select
trajectory data efficiently.
Figure 10: A specific track is selected among a set of tracks
in Route Display. Information about the selected track ap-
pears on the right-hand side panel.
5.2 Specifying a Region of Interest
An interactive polygon tool has been made available
in the software (Figure 9), which lets the user specify
polygonal regions of interest. For example, using the
tool, the user can filter out small vehicle tracks that
end before the stop bar at an intersection. Stop bars
or stop lines are the 24-inch- wide solid white lines
are drawn at intersections to indicate to the vehicles
where to stop if the signal is non-permitting. Using
the polygon tool, the user can also classify pedestrian
tracks into those that cross roads at an intersection and
those that remain on the sidewalk.
The polygon tool plays an essential role in the
video and SPaT timestamp synchronization, which is
done by marking the stop bar for phase 2 ingress traf-
fic, using the polygon tool. The timestamp, vt, of the
first stopped vehicle to pass the stop bar after phase 2
signal changes to green, is recorded.
5.3 Single Track Features
These capabilities are offered on the Route Display
page that pops up on clicking “Show All Sets”. The
set of interest may be chosen from the “Set Name”
dropdown list. All tracks that belong to this set are ac-
cessible via the “Tracks” dropdown list. The time in-
terval of analysis is shown by the Start and End times.
It is possible to rotate the view on the display panel by
180 degrees using the Rotate button or to create a lat-
eral inversion by clicking the Mirror button. Some
of the capabilities pertaining to a single track are as
follows.
Selecting a Specific Track from a Set. Figure 10
shows a specific track from a set of tracks. This track
A Visual Analytics System for Processed Videos from Traffic Intersections
73
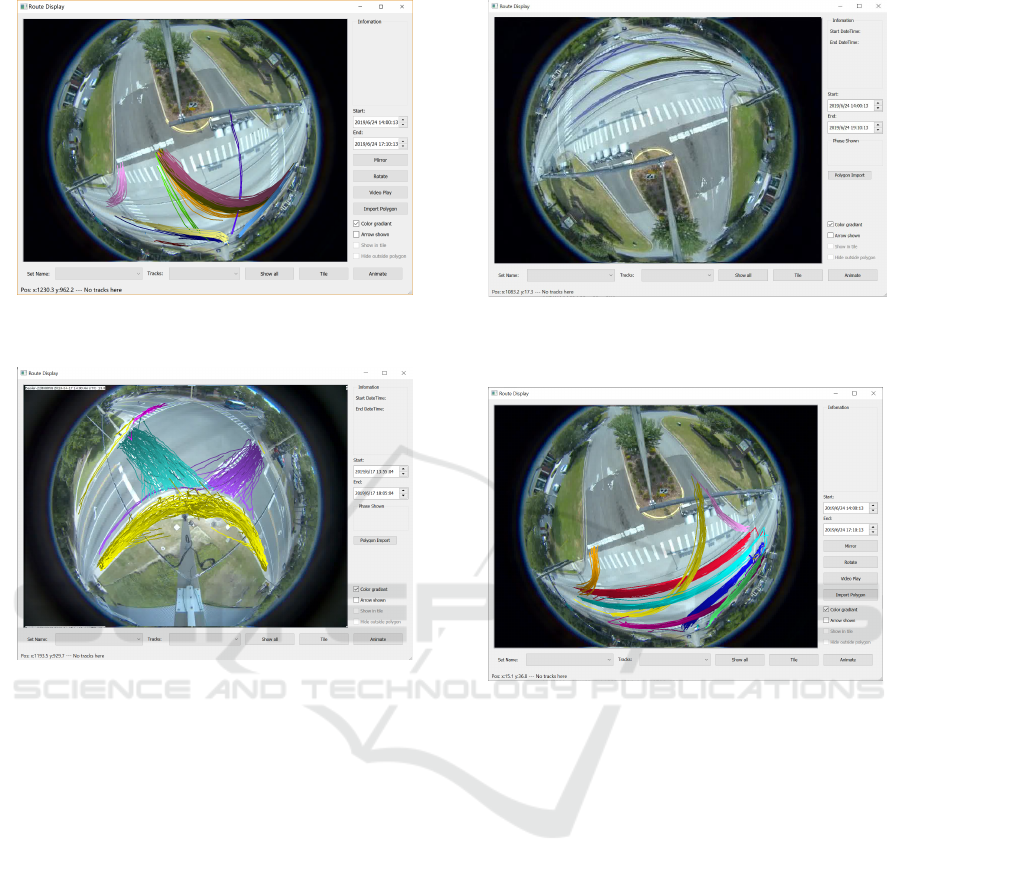
Figure 11: The vehicle clusters when the minor street with
movement phases 4 and 8 are served green.
Figure 12: The pedestrian clusters at an intersection. Some
pedestrians cross the street while others just walk along the
sidewalk.
may be selected by simply clicking on the track or by
choosing a specific track from the Tracks dropdown
list.
Determining Coordinates and Tracks on Canvas.
The user can find the coordinates of a point on the
canvas by simply pointing the mouse there and, if
there is a track covering that point, then selecting the
corresponding track number.
Displaying Direction of Movement. Given a tra-
jectory, the user may detect the direction of movement
by enabling the color gradient or arrow checkbox or
both. The color gradient option marks the start point
of the track with the lightest shade, which darkens as
the track progresses, ending the track with the darkest
shade. Figure 10 shows the direction of the track with
both features enabled. The color gradient feature be-
comes useful if many tracks start and end in the same
regions. So, in some of the later figures, we only use
the color gradient.
Figure 13: Tracks running a red light over a particular time
period. These tracks were verified by checking against the
video.
Figure 14: Multiple sets each of a different color, displayed
using the “Show All” button of Route Display. In this ex-
ample, each set was chosen to represent a cluster.
Animating Tracks. The “Animate” button, when
clicked on a selected track, shows a dot traveling on
the track at the same speed as it is recorded in the
database, which becomes especially useful while de-
bugging to see if the object on the track stopped for a
while before proceeding to complete the trajectory.
Playing Video Clip. By clicking on “Video Play”,
it is possible to play out the actual video clip of the
object that created the track. This feature is available
only for debugging purposes. In the production soft-
ware, the videos are deleted as soon as the video pro-
cessing step converts the video to timestamped coor-
dinates.
5.4 Multiple Sets
It is useful to view multiple sets together. There are
currently two ways to achieve this objective. Fig-
ure 14 demonstrates the first way, in which the user
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
74
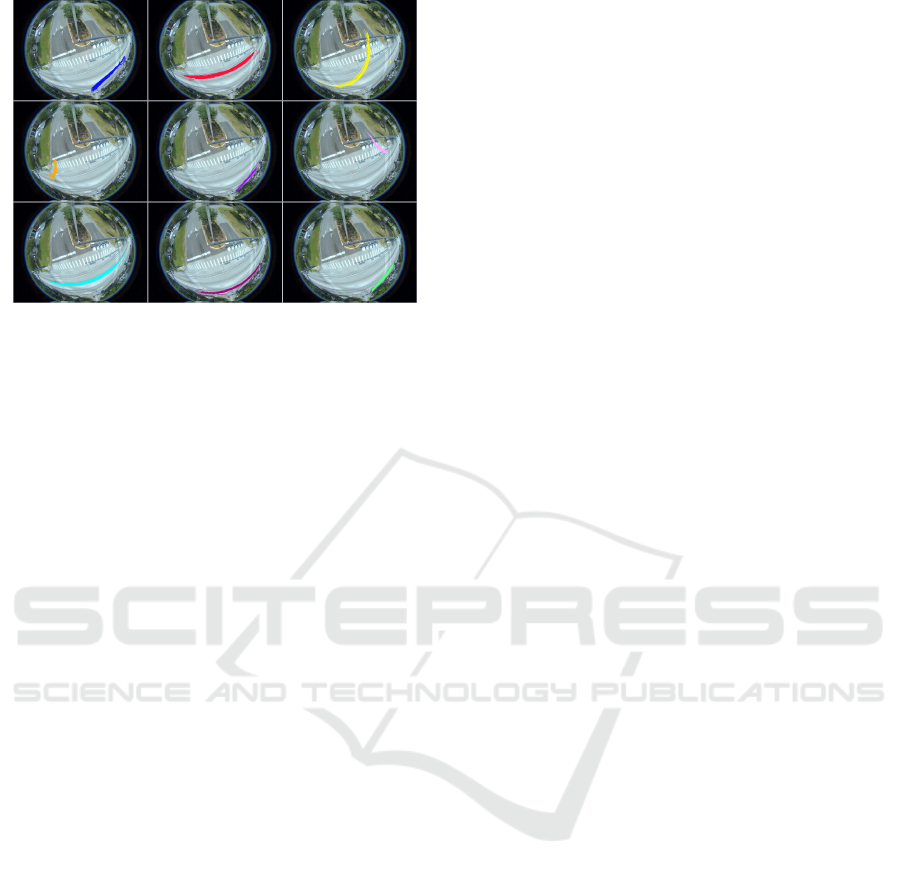
Figure 15: Multiple sets each on a different tile, displayed
using the “Tile” button of Route Display. In this example,
each set was chosen to represent a cluster.
can choose different colors for different sets and dis-
play all sets on the same canvas by clicking the “Show
All” button on the “Route Display” window. Fig-
ure 15 demonstrates the other way, which is to use
tiling. Tiling is done by simply clicking on the “Tile”
button at the bottom of the “Route Display” window.
Each set appears on a different tile.
We present some results for trend analysis using
the above approach. Figure 16 shows the time of day
and day of the week trends for the main clusters of car
trajectories, the figures in each column are from a dif-
ferent day, and the figures in each row are for a differ-
ent time. Specifically, the figures on the left, middle,
and right columns are from a Monday, Wednesday,
and Sunday, respectively. The figures on each row are
from different two-hour intervals during early morn-
ing (7 AM–9 AM, top row), mid-morning (11 AM–1
PM, second row from the top), afternoon (3 PM–5
PM, third row from the top), and evening (7 PM–9
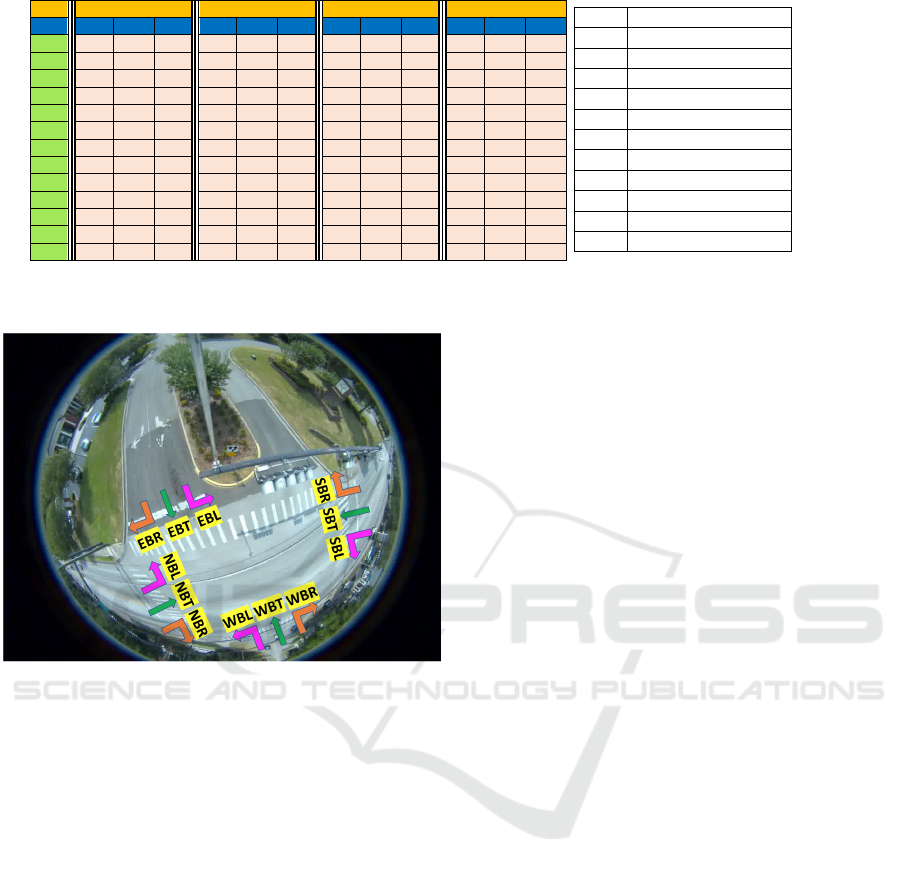
PM, the last row). Figure 17 presents the correspond-
ing exact count of vehicles for each approach marked
in Figure 18.
From Figure 16, as well as from the table in Fig-
ure 17, we observe the following:
1. A significant reduction in the volume of cars oc-
curs on Sunday, especially during the early morn-
ing and late evening hours, compared to that on
a weekday. For example, there were about 60%
and 40% fewer cars during the intervals 7 AM–9
AM and 7 PM–9 PM, respectively, on a Sunday
compared to Monday.
2. There are fewer cars during the mid-morning and
afternoon hours on a Sunday as compared to sim-
ilar times on Monday (by around 20%).
3. The orange egress tracks (EBL) and the corre-
sponding blue ingress tracks (NBL) near the mid-
dle of the images peak during working hours.
Thus, we infer that the top of the image is an of-
fice complex. The ingress and egress traffic pat-
terns reveal a potential optimization of the signal
plan by allowing the most green time to the major
through movements (NBT and SBT) during the
non-working hours.
4. The total volume of cars during the early morning
hours of Monday is fewer than that of Wednes-
day by about 50%, while there are about 40%
more cars in the late evening on Monday than on
Wednesday, which indicates a late start and a late
end of the day on Monday, the first day of the
workweek.
5. For this particular intersection, more cars are
northbound during the morning and more cars
that are southbound during the evening, which
probably indicates that the major residential areas
nearby are towards the south.
6 CONCLUSIONS
We have developed a novel visual analytics software
that is designed to serve the broader user community
of traffic practitioners in analyzing the efficiency and
safety of an intersection. It uses data generated from
video analysis that corresponds to spatial locations
and timestamps of all the objects passing through an
intersection along with their object type.
Using the visualization tool, a traffic engineer can
quickly analyze the normal clusters and anomalous
clusters to get a better understanding of traffic behav-
ior at an intersection. Our software helps diagnose the
following type of scenarios:
1. It can help detect when a large fraction of red-light
violations occur at an intersection. Once a prob-
lem area is detected, the traffic practitioner can
potentially address this by suitably address signal
timing plans for an intersection or neighboring in-
tersections on a corridor.
2. High traffic volume on a turning movement, but
comparatively lower green time assigned to it.
This traffic pattern may vary by the time of day
or the day of the week.
The tool provides a simple interface for filtering
and selection mechanisms for the desired trajectories,
which can be based on time of day, day of the week,
object type (pedestrian, cyclist, car), and signal time
phase. We have demonstrated the use of our tool to fil-
ter trajectories to study them further and applied the
software on an intersection to show clustering results
A Visual Analytics System for Processed Videos from Traffic Intersections
75
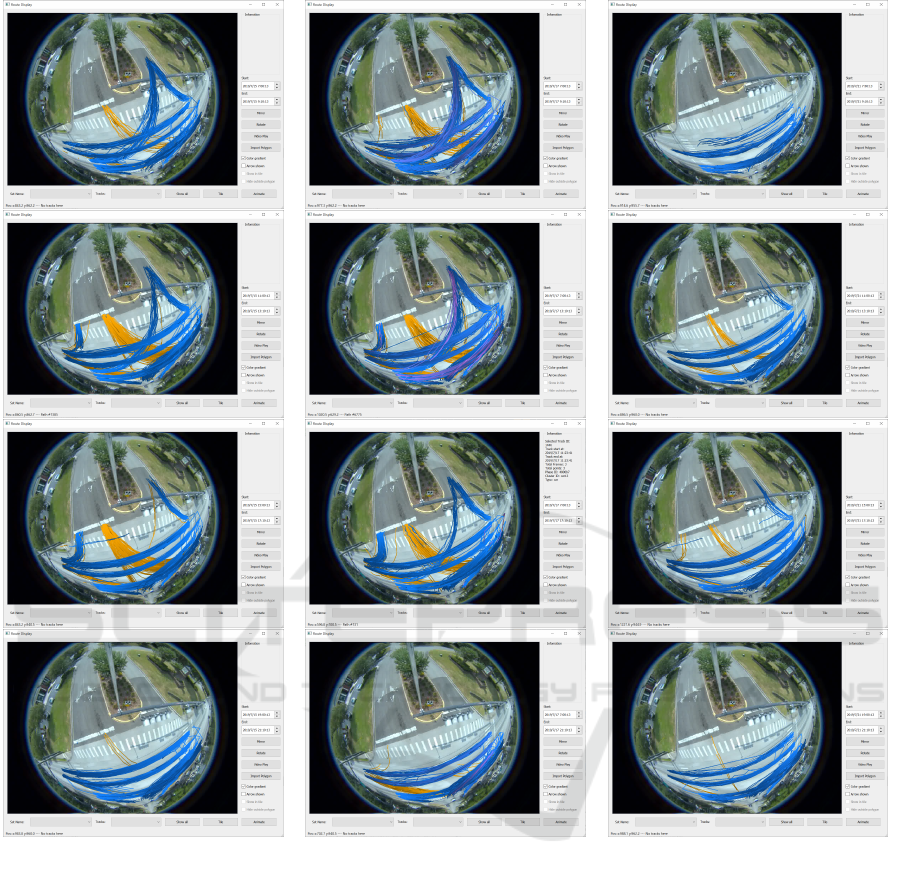
Figure 16: Clusters for trend analysis. Each column is for a different day. The left, middle, and right columns are for Monday,
Wednesday, and Sunday, respectively. Each row is for a different time of day. The top row is early morning (7 AM–9 AM), the
second row is late morning (11 AM–1 PM), the third row is afternoon (3 PM–5 PM), and the last row is late evening (7 PM–9
PM). There are fewer cars on Sundays. Orange tracks seem to be present during working hours, suggesting the presence of
an office complex near the top of the image. Monday sees a late start and a late end of the day, and there is more northbound
traffic in the morning and southbound traffic in the evening, suggesting the presence of a residential area in the south.
and examples of anomalous trajectories. Also, the
software could be useful in studying trends in traf-
fic patterns for different times of the day and different
days of the week.
As part of the future work, we would enhance the
visualization to display unwarped, instead of the ra-
dially distorted images obtained from a fisheye cam-
era. The tool will also support intersection trajectory
analysis at real-time along with a historical analysis
of trajectories. The tool will be used to view tables
and charts of various statistics of the objects such as
speed, and near-miss events (Huang et al., 2020a).
ACKNOWLEDGEMENTS
This work was supported in part by the Florida De-
partment of Transportation (FDOT) and NSF CNS
1922782. The opinions, findings, and conclusions ex-
pressed in this publication are those of the author(s)
and not necessarily those of FDOT, the U.S. Depart-
ment of Transportation, or the National Science Foun-
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
76
Time
7AM – 9AM
11AM – 1PM
3PM – 5PM
7PM – 9PM
Day
Mon
Wed
Sun
Mon
Wed
Sun
Mon
Wed
Sun
Mon
Wed
Sun
EBL
20
87
0
151
134
13
129
95
9
12
0
0
EBR
0
2
0
159
51
0
129
111
4
0
0
0
EBT
0
8
0
6
4
2
13
2
2
0
0
0
NBL
144
218
0
63
51
3
27
16
0
0
0
0
NBR
110
99
22
129
67
146
182
138
140
114
79
14
NBT
1103
2102
446
1302
1146
1421
1219
1085
1077
761
643
560
SBL
50
106
43
199
134
128
194
134
156
135
145
145
SBR
81
93
0
115
125
0
52
51
14
0
0
52
SBT
380
749
199
1167
1172
1043
1530
1257
1141
1084
691
579
WBL
58
92
58
69
130
140
168
80
202
159
100
73
WBR
156
179
42
297
270
59
227
158
208
130
21
72
WBT
0
4
0
8
0
0
3
0
0
0
0
0
Total
2102
3739
810
3665
3284
2955
3873
3127
2953
2447
1679
1495
EBL
East Bound Left
EBR
East Bound Right
EBT
East Bound Through
NBL
North Bound Left
NBR
North Bound Right
NBT
North Bound Through
SBL
South Bound Left
SBR
South Bound Right
SBT
South Bound Through
WBL
West Bound Left
WBR
West Bound Right
WBT
West Bound Through
Figure 17: Turning and through movement counts for various time periods in a single day.
Figure 18: Representation of codes for allowed movements
of vehicles at the intersection.
dation.
The authors are thankful to the City of Gainesville
for providing access to a fisheye camera and the con-
troller logs at different intersections.
REFERENCES
AL-Dohuki, S., Kamw, F., Y. Zhao, X. Y., and Yang, J.
(2019). Trajanalytics: An open source geographical
trajectory data visualization software. In The 22nd
IEEE Intelligent Transportation Systems Conference.
Banerjee, T., Chen, K., Huang, X., Rangarajan, A., and
Ranka, S. (2019). A multi-sensor system for traffic
analysis at smart intersections. In IC3, pages 1–6.
Banerjee, T., Huang, X., Chen, K., Rangarajan, A., and
Ranka, S. (2020). Clustering object trajectories for
intersection traffic analysis. In VEHITS.
Douglas, D. H. and Peucker, T. K. (1973). Algorithms for
the reduction of the number of points required to rep-
resent a digitized line or its caricature.
Huang, X., Banerjee, T., Chen, K., Rangarajan, A., and
Ranka, S. (2020a). Machine learning based video pro-
cessing for real-time near-miss detection. In VEHITS.
Huang, X., He, P., Rangarajan, A., and Ranka, S. (2020b).
Intelligent intersection: Two-stream convolutional
networks for real-time near-accident detection in traf-
fic video. ACM Trans. Spatial Algorithms Syst., 6(2).
Huang, X., Yang, C., Ranka, S., and Rangarajan, A. (2018).
Supervoxel-based segmentation of 3d imagery with
optical flow integration for spatio temporal process-
ing. In IPSJ Transactions on Computer Vision and
Applications, volume 10, page 9.
Kim, W., Shim, C., Suh, I., and Chung, Y. (2017). A visual
explorer for analyzing trajectory patterns.
Ramer, U. (1972). An iterative procedure for the polygonal
approximation of plane curves. Computer Graphics
and Image Processing, 1(3):244 – 256.
Salvador, S. and Chan, P. (2004). Fastdtw: Toward accurate
dynamic time warping in linear time and space. In
KDD. Citeseer.
Sha, J., Zhao, Y., Xu, W., Zhao, H., Cui, J., and Zha, H.
(2011). Trajectory analysis of moving objects at inter-
section based on laser-data. In ITSC, pages 289–294.
US Department of Transportation, F. H. A.
(2008). Traffic signal timing manual.
https://ops.fhwa.dot.gov/publications/fhwahop08024/-
chapter4.htm.
Xu, H., Zhou, Y., Lin, W., and Zha, H. (2015). Unsuper-
vised trajectory clustering via adaptive multi-kernel-
based shrinkage. In ICCV, pages 4328–4336.
A Visual Analytics System for Processed Videos from Traffic Intersections
77
