
Automatic Train Operation: History and Open Questions
Ale
ˇ
s Lieskovsk
´
y
1
, Ivo Myslivec
1
, and Michal
ˇ
Zemli
ˇ
cka
1,2,3 a
1
Z
´
avod Technika, A
ˇ
ZD Praha, s.r.o.,
ˇ
Zirovnick
´
a 3146/2, Praha 10, Czech Republic
2
Department of Informatics, Jan Evangelista Purkyn
ˇ
e University,
ˇ
Cesk
´
e ml
´
ade
ˇ
ze 8,
´
Ust
´
ı nad Labem, Czech Republic
3
Department of Software and Computer Science Education, Charles University, Praha, Czech Republic
Keywords:
Automatic Train Operation, ATO Strategy, Human-machine Interface.
Abstract:
The paper presents the concept of automatic train operation. We give here short description of its functionality
and remember some points from its history. There is an overview of various future development as well as
proposals for improvement of some existing, especially mainline, solutions. There are presented also some
observations from decades of practical use of automatic train operation in the Czech Republic. Selected
challenges are presented and discussed.
1 INTRODUCTION
Even long-time used technologies as railway (what
could be expected to be already mature) could be fur-
ther improved. One of the possible improvements
what are slowly getting into action (or what is in-
tended to be used in relatively near future) is Auto-
matic Train Operation (ATO). It is a technology al-
lowing (under some circumstances) to ride a train. In
some cases (at special separated and protected tracks
as in underground or airport trains) it could replace
the driver, otherwise it could help the driver to fulfil
his hard work. It could help to care about speed lim-
its, stopping points, and to some extent also following
the timetable.
ATO itself is partitioned into two cooperating sys-
tems: one collects necessary data and distributes them
to the trains (usually called trackside), and the one
that could drive and control the trains (or take part on
it) using the received data (called onboard). The on-
board part usually cooperates with Automatic Train
Protection (ATP; a system that protects the train from
some critical situations like going too fast or running
through place where it is not allowed) and with train
control system.
The trackside part should collect and distribute all
the necessary data concerning train ride. They are col-
lected from various systems: track description from
asset management, timetables and current data from
(often multiple) Traffic Management Systems (TMS)
that control traffic within given area.
a
https://orcid.org/0000-0002-0951-0272
ATO can play multiple roles: It can simplify
driver’s work by taking control over speed, precise
stopping, and following the timetable. It can reduce
energy consumption by optimizing train speed. It can
reduce train and asset maintenance costs by reducing
the speedups and braking during the train ride. ATO
systems can also handle the door opening and closing.
For its proper use ATO must be able to recognize
where the train exactly is, what the limitations of the
track are, where are the planned stops, and a lot of
other information. There are two basic approaches to
equipping train with necessary information:
1. The train is always online and getting changes
whenever corresponding TMS collects them.
2. The train is equipped with track description and
timetable and potential changes could be handled
by informing the driver that could make some ad-
justments.
Let us make a tour on the prerequisites and history
of ATO, its current development and focus on its open
questions. We will mention several approaches and
compare them.
Structure of the paper is as follows: Overview of
principles used for ATO design and how they coop-
erate are in Sections 2 and 3. Data overview and re-
lated procedures are in Sections 4 and 5. Section 6
lists common challenges to be solved by any ATO
solutions. Section 7 compares on-line and off-line
ATO. Our experience from development and decades
of use of ATO are in Section 8. Common require-
ments of potential ATO systems are collected in Sec-
tion 9. Section 10 focuses on solution-specific chal-
260
Lieskovský, A., Myslivec, I. and Žemli
ˇ
cka, M.
Automatic Train Operation: History and Open Questions.
DOI: 10.5220/0009418002600267
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 260-267
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

lenges. Our proposals and hints are collected in Sec-
tions 11 and 12. Finally, Section 13 summarizes the
conclusions.
2 BACKGROUND AND HISTORY
2.1 Technical Background
Some actions required for proper ATO functionality
are required also for proper functionality of ATP. As
safety is for railway more critical requirement than
simplification of drivers’ work, some of the tech-
niques were developed primarily for ATP.
Such functions cover positioning of the train, en-
coding speed limits and signals, computing braking
curves, handling varying train length, and many oth-
ers. Many of the problems are complex and interest-
ing tasks also from IT perspective: For example, for
train positioning the input data are often taken from
various sources with varying quality but the result
(where to stop) must be quite precise – the train must
stop sooner than at indicated position (before ”stop”
signal or before end of track). Basic source of lin-
ear position (position on the track) is usually taken
from odometry (system computing current position
from wheel cycling). As the wheels could slip and
slide and their size is usually not known with abso-
lute precision, after a while such measurements could
differ from reality. It is therefore necessary to detect
the precise position using other means and restrict the
position error given by odometry. This precise posi-
tioning is performed by precise placement of balises
(special points detectable by trains) into track. Balises
usually work on magnetic or electromagnetic basis.
The balises must be (to some extent) unique – they
must be equipped by a code identifying them. It al-
lows the trains to recognize where they are.
Global satellite positioning systems (like GPS,
Galileo or GLONASS) are currently not always pre-
cise enough to deliver the data according to the needs
of ATO. For use in railways the shift of three meters
may cause erroneous positioning of the train to paral-
lel tracks. But even parallel tracks could have differ-
ent speed limits and different positions of signals and
platforms.
Satellite positioning is acceptable for lengthwise
positioning (where on the given track the train is) es-
pecially at local tracks. Precise lateral positioning
must be supported by additional systems or by human
involvement.
If the train should stop with given precision, the
track data must be available with at least slightly bet-
ter precision.
The railway speed limits are related not only to the
train front but also to the train rear – usually it applies
what is more restrictive. It is, the train (its driver as
well as its ATP and ATO systems) ”must know” its
length to identify, what are the real speed limits along
the track.
The above mentioned techniques and procedures
developed for automatic train protection could be of-
ten used (after some changes) for the automatic train
operation. Some of them have been directly devel-
oped for ATO: when an older ATP system, which does
not provide localisation information, is used, ATO re-
quires its own source of precise train positioning.
2.2 Highlights from ATO History
First systems helping drivers to stop by the platform
were developed in the second half of XX-th century.
The first ATO systems were developed for closed
railway systems like metro or special railways. The
Victoria Line in London (UK) has been opened with
automatic train operation in 1968. The Bay Area
Rapid Transit using multiple lines ATO has been
opened in 1972. Line C of Prague Metro has been
equipped with ATO in 1978.
The first ATO used for classic railway in everyday
operation (AVV, automatick
´
e veden
´
ı vlaku) has been
introduced in Czech Republic in 1991. It works on
many lines (around 3000 km of total approx. 9000 km
od Czech Republic railway network length) running
on shared tracks with non-ATO trains.
2.3 Current Development
During last years there is a significant development in
ATO driven by various projects in various countries.
Some systems are based on tight cooperation with sin-
gle ATP (e.g. ATO over ETCS), others are going to be
more open.
There appear first demonstrations or even applica-
tions of fully automated (unattended – without driver)
classic railway ATO in many countries (Australia,
China, Russia, ...). For practical use it makes sense to
make them interoperable in larger areas (huge coun-
tries or even continents).
Later in this paper we will mention some of the
prerequisites of such interoperability.
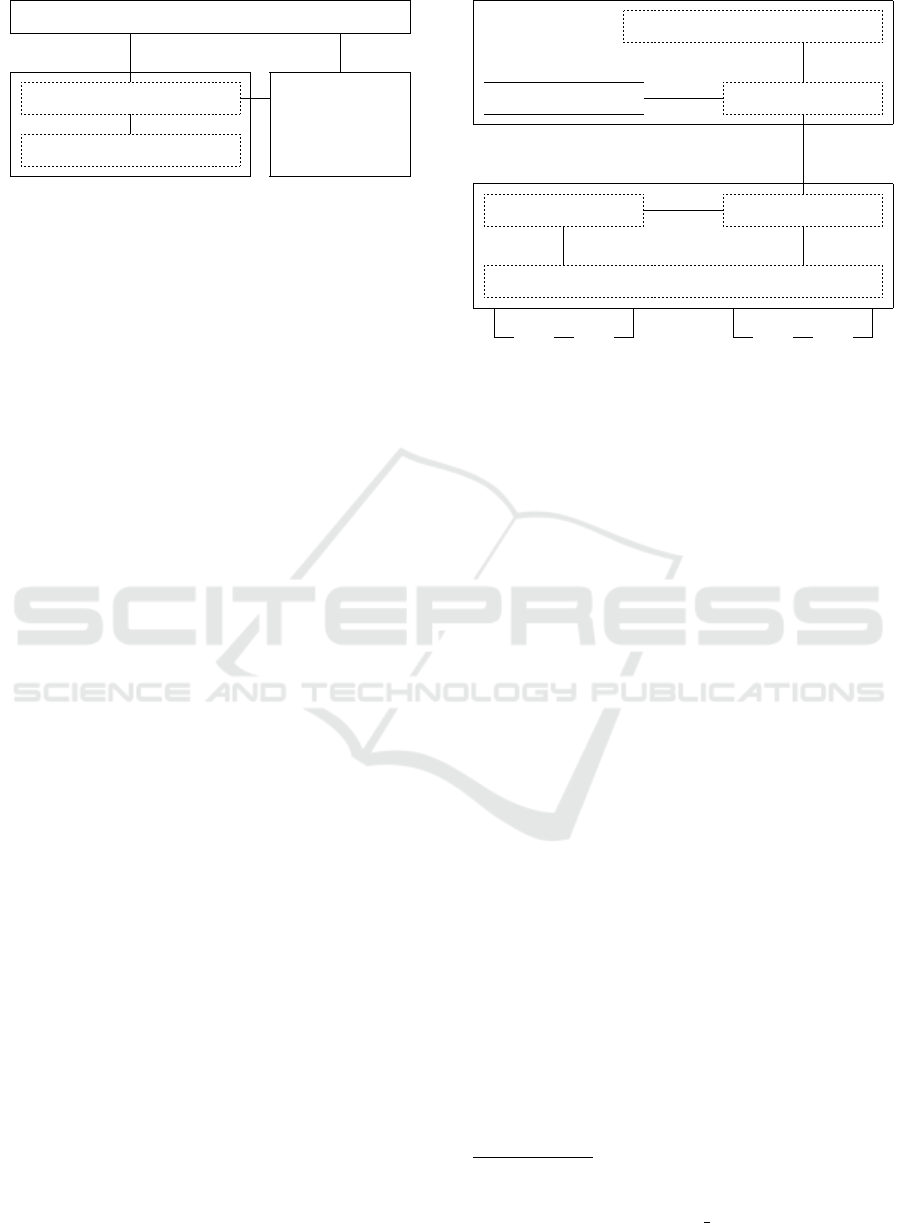
3 HOW ATO WORKS
As written above, ATO is divided into two basic parts
(compare also Fig. 1):
Automatic Train Operation: History and Open Questions
261
TMS – Traffic Management System
6
?
6
Track map
database
ATO trackside
6?
ATO on-board
ATO
Figure 1: Rough view on ATO and cooperating systems.
1. Trackside – collecting and converting data from
various sources to the form usable for the second
part
2. Onboard – performs following actions:
(a) positioning the train;
(b) computing dynamic speed profile according
track description, signals, additional restric-
tions, train attributes, current conditions, and
timetable;
(c) traction / braking control;
Trackside part of ATO must be able to cooperate with
other trackside systems – especially with TMS that
have timetables and asset management that keeping
track description up-to-date.
Building trackside part is a task of infrastructure
manager, whereas equipping trains with the on-board
part must be done (ordered and paid) by the vehicle
owner. As many trains are going across borders be-
tween areas under control of different infrastructure
managers and within areas of individual infrastructure
managers There are several projects trying to make
the necessary parts interoperable across several coun-
tries – equipping tracks and vehicles by ETCS. The
proposed standardized architecture is – with respect
to work of ATO WP in Shift2Rail published e.g. in
(Buurmans, 2019) or in (X2Rail-1, 2017) – in a sim-
plified form captured in Fig. 2. Subsets are specifica-
tion documents of the ERTMS/ETCS system used in
the European Technical Specifications for Interoper-
ability of the Railway System.
4 NECESSARY DATA
Complexity of the task can be derived from the data
that are necessary. The following simplified list con-
tains data for both (on-line and off-line) ATO ver-
sions:
• Track description
– speed limits according train class (position,
value, and front/rear validity);
– gradients (value, position);
ground systems
TMS – Traffic Mgmt System
6
?
subset
131
track data
ATO trackside
-
6
?
subset
126
ETCS on-board
6
?
subset
034 or 119
subset
-
130
ATO on-board
6
?
subset
139
basic train control
Figure 2: Cooperation of ATO with related services and
their specification in subsets.
– platforms (positions, length, train alignment);
– position of signals (if not transmitted from
ATP);
• timetable
– times for planned stops
– times for passing points (time navigation)
• other limitations
– power limits
– axle load limits
– ...
5 HANDLING DATA CHANGES
The data could change even when the train is on the
track – additional limits could appear, the train will
take other path, etc. The issue is, how the train can
cope with it.
The data update could be sent to the train only if
it is available online. When the train is not connected
to the network, other approach must be used.
5.1 Connected Train
European Union Agency for Railways (ERA
2
) plans
to introduce a standardized communication between
TMS and ATO and between ATO trackside and on-
board parts based on the work performed by the com-
panies organised in Shift2Rail
3
, UNISIG
4
and EUG
5
.
2
https://www.era.europa.eu/
3
https://shift2rail.org/
4
http://www.ertms.net/?page id=50
5
https://ertms.be/
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
262

5.2 Off-line Train
The selection of different path (using other track than
planned but still going through the same stations)
must be always taken into account: the train speed
must reflect the current strongest speed restriction. In
some cases the selected routes could be recognized
from signalling: straight track usually does not re-
strict the speed (and could be signalized by ”free”),
whereas siding often limits the speed (and could be
therefore signalized by lower speed limit). The in-
formation about the active signal could be transferred
through ATP.
6 COMMON CHALLENGES
The way the data are reaching the train does not in-
fluence some of the technical challenges that must be
solved anyway. It covers train positioning, speed lim-
its, braking curves, acceleration, and many others.
Many of the challenges have been already dis-
cussed in literature (and, of course, tested in practice).
Let us mention at least some of them.
6.1 Train Positioning
One of the hardest challenges for ATO is precise, safe,
and reliable train positioning. Although trains are
moving on rails (and their positions are known) it is
still not easy to position the train precisely enough:
GNSS (global navigation satellite systems) localisa-
tion error may be greater than the Also the positioning
on the track is often required to be more precise than
the GNSS-based position could give.
One can say that automatic train protection (ATP)
systems must have precise enough positioning. They
can determine the track. But they have different ap-
proach to linear positioning: For an ATP system the
error could be asymmetric – if it stops several (proba-
bly also several dozens) meters sooner than necessary,
it is still good enough. But it is not allowed to stop
even a bit later.
ATO has other requirements on train positioning:
it needs to stop not too late but also not too soon –
e.g. not to miss the platform or not to speed up too
soon.
6.2 Speed Limits
In some cases the speed limits concern front of the
train, in other cases its rear. In most cases it holds
for the more restrictive case: when the speed limit
is getting more restrictive, it must be fulfilled by the
train front (front of leading vehicle), whereas speed-
ing up must be usually done with respect to the rear of
the train. Exceptions exist and are marked by special
signs allowing immediate speed up.
Some speed limits are fixed for a long time (typ-
ically the ones related to the physical parameters of
the track). These parameters could be distributed to
the trains on-line as well as off-line.
Temporary speed restrictions and speed restric-
tions given by route setting are of dynamic nature and
need to be updated immediately. They must be trans-
ferred on-line or entered by operator (driver). For (au-
tomatic) driving it is only important whether the data
are available in time. From the ATO perspective it is
not important how the data get into the system.
As mentioned above, it is important that the train
must reliably know its length. Although it could look
easy, it is not so. Trains could be composed not only
from new vehicles but also from older ones – even
decades old. Such vehicles need not be necessarily
equipped by the most current electronics and soft-
ware.
6.3 Acceleration and Braking Curve
If we know (as described above) the speed limits, we
should also drive so that we obey them. There are
many parameters that should be taken into account:
• gradients
• tunnels and their diameter/tightness
• adhesion
• available power output and its limitation
• braking type and mode
• ...
The above parameters could influence the train indi-
vidually as well as in combination. Some of the pa-
rameters are not known precisely – so, the control
must therefore take into account also the current be-
haviour of the train.
7 DIFFERENCES
It appears that on-line and off-line ATO systems can
share most algorithms – computations like position-
ing, speed profiles, timetable matching, braking, or
door opening appear to be the same. The differences
are in availability of information about surrounding
traffic, and real route settings. On-line ATO can have
all such information – if the connection with its track-
side part will work as expected and everywhere where
needed.
Automatic Train Operation: History and Open Questions
263

The main difference comes when the systems
come under stress: On-line systems could take ad-
vantages from updates if they are prepared and sent in
time by trackside (or the TMS behind). Off-line sys-
tems have only pre-loaded data. It is therefore mean-
ingful to load them with full maps and equip the track
so that they could quickly recognize where the route
leads (to which speed profile and potential stops).
On-line ATO can result in more efficient ride of
the trains (as they have more up-to-date and more pre-
cise data) – but only where the data are available and
in time. Off-line ATO is cheaper and can be used even
when the surrounding traffic data is not available.
8 EXPERIENCE FROM AVV
8.1 A few Gossips from AVV History
Automated Train Operation/Control (In Czech: Auto-
matick
´
e veden
´
ı vlaku (AVV); (Myslivec et al., 1998;
Lieskovsky and Myslivec, 2011)) is a system in-
stalled on hundreds of vehicles and used in practice
for many years (in commercial operation since 1991,
tests since half of 1960’s). Its basics have been de-
veloped decades ago. It has been therefore limited to
preloaded data available on board (at those times no
GSM-R or related technology has been available).
The dependency on preloaded on-board data led to
the graph-like track description. The graph contains
all tracks equipped with AVV-compatible balises. The
system can be therefore used everywhere where there
are necessary data available and where it is possible
to position precisely the train. The system is there-
fore robust to any change of the train path within this
graph. It the train is sent to some part of the track
where no information is available, it switches to con-
trol by the driver. The system always takes into ac-
count all (known) possible paths.
8.2 Cooperation of AVV with ATP
The AVV system reads the signals from national Class
B ATP system (compare (Lieskovsk
´
y et al., 2006))
and is capable to utilise data from onboard ETCS
if available (see (Lieskovsky and Myslivec, 2011)).
Even if no ATP is available, AVV can work alone and
can prevent some critical situations (can slow down
or stop the train if necessary).
8.3 AVV Approach to Data
The system is able to work without connectivity to
TMS On the other hand, it is limited to the areas for
whose it is equipped with corresponding maps. The
system is designed so that if a driver has some useful
information (s)he can enter the data relatively easily.
9 COMMON REQUIREMENTS
It is likely, and the available documents prove, that all
ATO systems need some basic information. It covers
information about speed limit start and end positions,
their validity for beginning or end of the train; plat-
forms and their positions; stopping points (their po-
sitions and required train alignment there); and train
timetable. There should be also information identify-
ing stations (to provide information about them to the
passengers), optionality of the stop (to induce its po-
tential request). Additionally, there should be avail-
able also some safety requirements (not to stop on
some places where it is not possible to rescue people
from the train).
If possible, it can be advantageous if there is in-
formation about current conditions around the train
like signals or information about other trains (e.g. if
there is a slow train ahead of given train, it could be
reasonable to slow down a bit); sometimes it could be
advantageous to speed up to allow smooth train cross-
ing on a more appropriate place.
The data could be stored efficiently. The detailed
track description covering haul between Praha and
Kol
´
ın (62 km distance, multiple stations, about 320
km of single track, single direction line) have been
stored in a 3KB piece of EPROM.
10 DIVERGING REQUIREMENTS
Various ATO systems could require different addi-
tional information. It can cover position and radius
of curves, some could require also their direction (in
other cases only modified train resistance could be
enough). Similarly, some systems can take advantage
from information about tunnels and bridges and their
parameters.
As it seems to be advantageous to have this in-
formation as in these places, the train running resis-
tance really is higher than the one in straight track in
open country, the fact is that the running resistance
provided by vehicle manufacturer is usually higher
than reality (not to be a problem to verify it during
the tests) and after adding this additional component,
the expected running resistance goes more away from
reality... Finally, there exists a component that is not
possible to take into computations: wind. Its asset
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
264

to running resistance is much higher than the one of
tunnels, bridges or curves.
In some countries it is allowed to stop at a long
enough platform only, in some countries there is
sometimes allowed to stop at a short platform and
open appropriate doors only. Support for it could
be also recognized as useful in some cases only
(e.g. some infrastructure managers could require it
and some do not want to care about).
It could be useful to distinguish how the doors are
opened: at some stations they could be opened au-
tomatically, on other stations they could be only un-
locked for opening on demand.
11 THE PROPOSAL
11.1 Approach to ATO
We propose to treat ATO as a general service with
preference of robustness over implementation sim-
plicity.
We suppose that customers could benefit from
having ATO as able to work on ETCS- as well as
national ATP-equipped infrastructure. Having infor-
mation about the planned path with adjacent tracks
(i.e. to have the information of the track not only as
a line but as a general graph) could make the system
more robust to the data failures.
ATO solutions capable to operate on both interop-
erable (ETCS) and non- interoperable lines can ben-
efit from the data from various ATPs. It can ex-
tend applicability of the ATO technology with all its
advantages to significantly more tracks and trains.
Measurements published in (
ˇ
Sula, 1990) and men-
tioned again in (Jackson, 2017) has shown that AVV
has saved 10–30% of energy as well as improving
timetable. Can we say that these advantages will not
be allowed on local tracks?
11.2 On-line vs. Off-line
We suppose that the modern ATO systems should be
built so that they can work in both environments: on-
line as well as off-line. It makes sense to build the
ATO system so that it could be used on-line as well
as off-line and with any ATP fulfilling some reason-
able minimal requirements. It also makes sense to
define minimal set of functions necessary for driving
the train by ATO. Such interface could then be used by
ATO without necessity to re-certificate the train con-
trol in all countries.
11.3 Opportunity not to Collect Unused
Data
Some data are in some countries already not col-
lected. As they are typically not used there, it could
be enough to set up generally some default value and
do not mention it in all track-describing datagrams.
But it requires the applicability of country- or area-
predefined values and more variable data format.
On the other hand, if some data are not available,
it could be better to have an opportunity to support
only partial description of the track. If the on-board
ATO can use the available data, OK, if not, let it (tem-
porarily) switch to manual control over the train.
11.4 ATO–train Interface
The communication between ATO and vehicle there
must be at least:
• request on traction / brake;
• backward information on the successful use of
traction / brake;
• other parameters of the train not processed by
ATP (often ETCS) – like weight, overall power,
or traction limits.
11.5 ATO–ATP Interface
The data transfer between ATP and ATO contains the
data that is ATP able to provide. In the case of ETCS
it is especially:
• static speed profile;
• braking and other parameters of the train
(e.g. train length) to synchronize the values be-
tween ETCS and ATO; ATO is therefore able to
compute the same braking curve as ETCS (and
anticipate the braking activities of ETCS);
• localization data (identification of the position of
the train on the track / network);
• last but not least, data from ATO for displaying
on the ETCS display. It appears to be reason-
able (and about 20 years of practice with AVV
shows that it is gracefully accepted by the drivers)
to provide extra display with complex information
about the situation on the track in front of the train
and about plans of the ATO itself.
11.6 Data for ATO
The data for ATO system can be divided into follow-
ing groups:
Automatic Train Operation: History and Open Questions
265

1. Static (changes usually after several years or
decades) – track description, speed limits, po-
sitions of platforms, points of interest, stopping
alignments, etc.
2. Semi-static (could change several times a year) –
published timetable (train routes, stops, departure
and arrival times, ...)
3. Varying (usually change in weeks or months) –
temporary train path changes (e.g. due reconstruc-
tion of the track), temporary speed restrictions, ...
4. Dynamic (could change during the train run) –
selected routes, time restrictions (the train should
be there not sooner than t
a
and not later than t
b
).
12 SEMI-OPEN QUESTIONS
The world of ATO faces many questions. Some of
them have been handled in the past but current solvers
must try it again. Let us mention and formulate some
of them and give some hint according the first try.
12.1 Optimal Human–Machine
Cooperation
For the ATO community it is not clear what the op-
timal way of human-machine (driver–ATO) coopera-
tion is. Some authors (compare e.g. (Bienfait et al.,
2012)) claim that there must be clear cut between
full control by machine (ATO) and full control by the
driver. Others (compare e.g. (Lieskovsky and Mys-
livec, 2011)) propose to combine advantages of both
worlds. Practical combination is probably more com-
plicated to implement (and, what is harder, requires
deep understanding of the designers/developers of the
interface to train driving) but appears to be less re-
strictive and more flexible.
Let us formulate it using following parable: The
driver is smart and experienced enough to optimize
train driving based on his past experience and has
a better access and understanding of specific opera-
tional rules and limitations. The machine could be
better than the driver as it could have more detailed
or more precise specific data regarding train drive and
due to fast computation algorithms can provide spe-
cific action more precise and faster. Symbiotic work
of the machine driver and computer can take advan-
tage from both worlds: from precise computation over
lots of date and from experience and understanding.
12.2 Data Inconsistency Handling
As ATO as a whole collects for its proper work in-
formation from many systems and as (according cur-
rent knowledge from physics) the speed of a signal
is limited, it could happen that the data from vari-
ous sources are not synchronized. The question is,
whether we should expect that the data synchroniza-
tion is the task of all connected systems (especially
TMS) as it is expected in current developments in
ATO standardization in Europe or should there be
mechanisms in data distribution and exchange allow-
ing to recognize possible inconsistencies.
It seems that it is safer to be prepared for situa-
tions where something went wrong. We propose to
sacrifice small part of the system data throughput for
mechanisms allowing recognizing of potential issues
just to allow reasonable reaction.
12.3 Communication to Driver
What is the optimal extent of the information that
ATO should share with the driver? Should it be mini-
mized (not to disturb the driver) and safe a display or
should there be complex information on the situation
ahead and on the plans of ATO? The currently pro-
posed solution in AoE (one line of text is enough) is
derived from the fact that the ATO should not cooper-
ate with driver but drive the train alone (until the train
stops or until the driver takes control over the train).
The approach used in AVV (compare Figs. 3 and 4)
prefers providing complex information the driver by
ATO with all necessary data (like how far is the next
speed limit, what is the next signal and where it is, or
what is the next stop).
This picture was created upon of opinions and
notes of approximately 100 drivers, which took part
in the first year of real computer-based ATO opera-
tion on Czech Railways in 1991. In contrary to other
approaches, it comes from real, not simulated opera-
tion, and from real drivers, who were responsible for
safety and punctuality of real trains. After implement-
ing changes, this picture remains stable for almost 30
years of everyday use.
13 CONCLUSIONS
We have described automatic train operation as useful
intelligent system facing many interesting challenges
and issues. It has already shown its practical advan-
tages – compare its use in underground in many cities,
in several airport local trains, as well as in regular use
in standard railway (AVV).
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
266
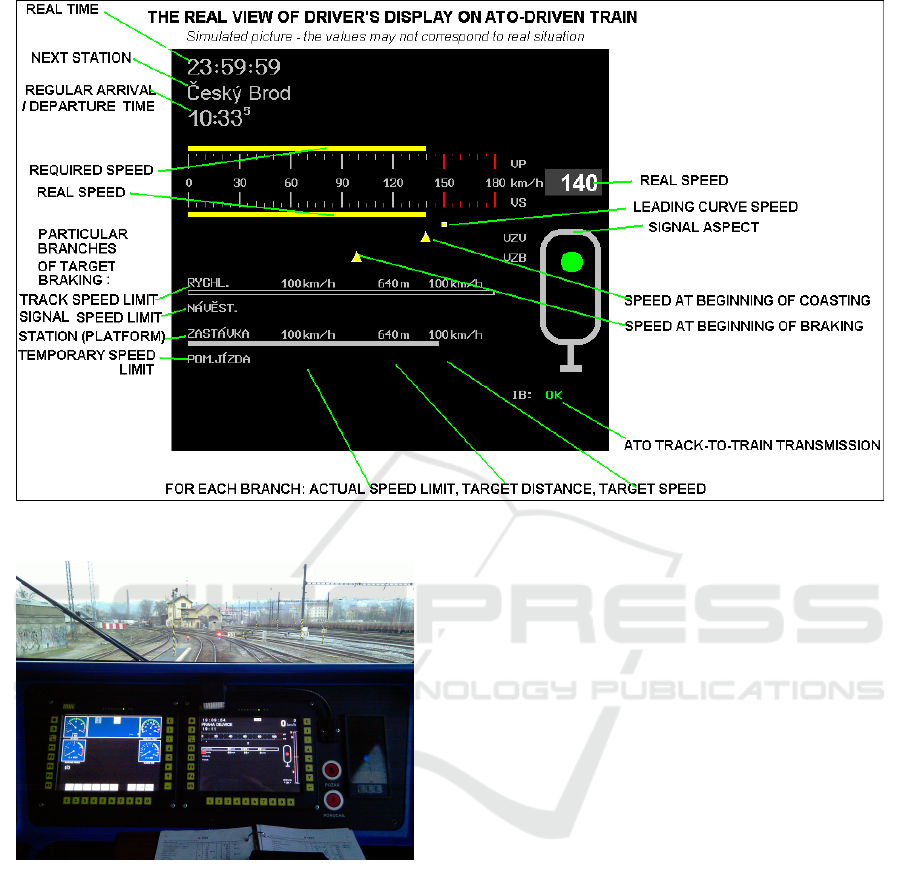
Figure 3: AVV Display Explained.
Figure 4: Diagnostic and AVV Displays.
Several challenges have been introduced and dis-
cussed as well as current developments in the area. It
has been observed that a significant group of current
developers tries to re-solve identified challenges that
have been already put and answered in the past. We
have described them and have tried to explain why the
questions have been answered so.
Currently the practical task in the ATO is to equip
the railway with the necessary equipment (balises),
to equip the trains with corresponding equipment, to
collect the necessary data and to connect the ATO to
other trackside systems. It appears that many ques-
tions of ATO concept and implementation (some of
them were mentioned here) could be answered only
if the corresponding people will get their own experi-
ence with ATO development, testing, and use.
REFERENCES
Bienfait, B., Zoetardt, P., and Barnard, B. (2012). Auto-
matic train operation: the mandatory improvement for
ETCS applications. Paper presented at Aspect 2012.
Buurmans, K. (2019). Automatic train operation over
legacy automatic train protection systems : A case
study on the Groningen-Buitenpost line. Master’s the-
sis, Delft University of Technology, faculty of Civil
Engineering and Geosciences, department Transport
& Planning.
Jackson, C. (2017). In search of the game changers. Rail-
way Gazette International, 173:29–32.
Lieskovsky, A. and Myslivec, I. (2011). ATO and ETCS
can work together. Railway Gazette International,
167(3):37–40.
Lieskovsk
´
y, A., Myslivec, I., and
ˇ
Spa
ˇ
cek, P. (2006).
ETCS a AVV – spolupr
´
ace, nikoliv konkurence.
V
ˇ
edeckotechnick
´
y sborn
´
ık
ˇ
CD, (21):1–6.
Myslivec, I.,
ˇ
Spa
ˇ
cek, P., and
ˇ
Sula, B. (1998). Automat-
ick
´
e veden
´
ı vlaku AVV. V
ˇ
edeckotechnick
´
y sborn
´
ık
ˇ
CD, (5):29–38.
ˇ
Sula, B. (1990). Einfluss der Fahrtechnik auf den Energie-
verbrauch eines Personenzuges. Elektrische Bahnen,
(4).
X2Rail-1 (2017). ATO over ETCS (up to GoA4). Presented
at CRCC 2017.
Automatic Train Operation: History and Open Questions
267
