
An Automatic Scenario Generator for Validation of Automated Valet
Parking Systems
Andrea Tagliavini
1
, Donato Ferraro
1
, Tomasz Kloda
2
and Paolo Burgio
1
1
Universit
`
a degli studi di Modena e Reggio Emilia, Italy
2
Technical University of Munich, Germany
Keywords:
Simulators, Autonomous Driving, Scenario Generation, Valet Parking, Virtual Test Drive, OpenSCENARIO.
Abstract:
A primary goal of self-driving car manufacturers is to create an autonomous car system that is clearly and
demonstrably safer than an average human-controlled car. The real-world tests are expensive, time-consuming
and potentially dangerous. The virtual simulation is therefore required. The autonomous driving valet parking
is expected to be the first commercially available automated driving function without a human driver at the
wheel (SAE Level 4). Although many simulation solutions for the automotive market already exist, none of
them features the parking environments. In this paper, we propose a new software virtual scenario generator
for the parking sites. The tool populates the synthetics parking maps with objects and actions related to these
environments: the cars driving from the drop-off point towards the vacant slots and the randomly placed parked
cars, each with a given probability of exiting its slot. The generated scenarios are in the OpenSCENARIO
format and are fully simulated in the Virtual Test Drive simulator.
1 INTRODUCTION
The mandatory requirement for the approval of the
highly automated and autonomous driving is to
demonstrate that the self-driving cars do not pose
more of a risk to pedestrians and other cars than the
cars piloted by humans. The validation of such sys-
tems needs to be as extensive and as complete as pos-
sible to cover every corner-case testing scenario. This
is usually done by millions of miles of road tests re-
sulting in very high costs in terms of both money and
time required by the field data collection. The real-
world tests are potentially dangerous, especially if
full- or semi-autonomous functionalities must be val-
idated. The simulation cannot fully replace the real-
world tests and driveable millage but can significantly
help to reduce potential safety risks, time-to-market
and the number of prototypes required in the develop-
ment and verification process.
1.1 Driving Simulation
The obvious advantage of the simulation methods for
the self-driving compared to the real-world testing is
that the simulation does not technically require a real
vehicle and has no running costs (e.g. fuel consump-
tion, maintenance). Simulation approach also widens
the spectrum of the test-cases allowing to recreate
many situations which would be too dangerous and
too expensive in the real-world involving pedestri-
ans, cyclists or high-speed maneuvers under differ-
ent weather, visibility and traffic conditions. Last but
not least, the testing process is significantly acceler-
ated by running the simulations at a faster pace than
real-time.
Full-scale simulation comes with the test catalog
covering the scene diversity and the variety of edge
cases. A relevant scenario is based on the gathered
data and the safety requirement specification. Creat-
ing each scenario statically can be long and allow to
test only a narrow set of the most common behaviors.
The machine learning algorithms driving autonomous
cars can be overfitted and fail in unseen scenarios
due to the little or no data variance. Random sub-
scenario generation for simulators is quite promising
in this respect.
The automatic augmentation of the gathered real-
world data can help to overcome this limitation by
generating the new mixed-reality scenarios avoiding
time-consuming and expensive human interaction. In
essence, the set of recorded data (weather conditions,
visibility, traffic) is mixed up to create a wider set of
test scenarios. The randomized elements in these sce-
narios are, principally, the actors (vehicles of various
Tagliavini, A., Ferraro, D., Kloda, T. and Burgio, P.
An Automatic Scenario Generator for Validation of Automated Valet Parking Systems.
DOI: 10.5220/0009417004890496
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 489-496
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
489

types and pedestrians), their behaviors and, to a lesser
extent, the surrounding scenery with the road net-
work. However, a non-controlled randomization of
generated scenarios may lead to the unrealistic sce-
narios or to the scenarios that may be out of testing
scope, potentially increasing the necessary time for
training and testing of the model. The parametrizable
scenario generators let the user define the boundaries
of the generation accordingly to the safety specifica-
tion and the use case under test.
1.2 Automated Valet Parking System
The automated valet parking system is about to
become the first commercially available facility at
SAE 4 level (Society of Automotive Engineers, 2018)
(a human is not required to take over in any situa-
tion) (Automotive World, 2018). The system drives
autonomously a vehicle from the drop-off point to
the assigned parking slot and returns it to the dedi-
cated pick-up point when required. The parking site
infrastructure retrofitted with sensors and connectiv-
ity communicates constantly with the vehicles and
guides them to the vacant parking slots. The prior
knowledge of the environment reduces the number
of test scenarios (compared to urban driving) but the
physical testing is still expensive and may still pose a
serious risk for the humans and the environment. This
operational domain requires also a set of its specific
models of objects and behaviors.
1.3 Contribution
In this paper, we introduce the UNIMORE Map Pop-
ulator, a virtual scenario generator for the parking
sites. The tool fills the scenario maps with objects and
actions related to the parking environments: parked
cars, pedestrians, moving cars looking for an empty
slot or the cars that are exiting their slots and re-
enter the traffic again. It permits a user-defined ra-
tio of traffic participants randomizing their place-
ment and their traffic behaviors within a parameter-
ized set of values (e.g. the distances between the ex-
iting cars and the cars under test). The tool is fully
integrated with the OFFIS StreetArt synthetic park-
ing maps generator. The scenarios are stored in the
OpenSCENARIO format and can be played in the Vir-
tual Test Drive (VTD) from Vires (VTD, 2019), a
well-established toolchain for driving simulation. To
our knowledge, the UNIMORE Map Populator and
the OFFIS StreetArt are the first scenario generators
specifically targeting driving in the parking areas. We
provide the necessary abstraction to build the models
of traffic in the parking areas and enable the safety
analysis required by the international standards (ISO,
2011).
1.4 Paper Organization
This document is structured as follows. In the next
section, we present the related work. In Section 3, we
describe the scenario generator for the static and dy-
namic content of the parking sites. Section 4 outlines
the simulation of the basic parking maneuvers. We
conclude the paper in Section 5.
2 RELATED WORKS
In this section, we describe the works that focus on
scenario-based simulation automated or autonomous
driving software with respect to the proposed virtual
scenario generator for the parking sites.
2.1 Driving Simulators
In the fields of automated and autonomous driv-
ing, simulators are widely adopted for both train-
ing and testing purposes. The simulators like Dy-
nacar (Tecnalia, 2019) or Gazebo (Syed Ahamed
et al., 2018) target dynamic aspects of the vehicle
(e.g. electrified powertrain systems) while others,
like VTD (VTD, 2019), PreScan (TASS International,
2019) or Carla (Dosovitskiy et al., 2017) allow traf-
fic behavior testing. One of the most important fea-
tures of a driving simulator is realism, both in terms
of visual resemblance with the real world, physics and
vehicle behavior. In recent years, researchers started
also to exploit the capabilities of the video games
graphical engines. The simulators like Carla (urban
driving simulation) or Torcs (Wymann et al., 2015)
(racing simulation) are built on game engines such as
Unity and Unreal Engine. In this work, we decided
to use VTD to play the generated scenarios but any
simulator supporting OpenSCENARIO format can be
used instead.
2.2 Parameterized Simulation
The ASM Traffic adds traffic to dSPACE’s Automotive
Simulation Models (ASM) (dSPACE, 2017). It simu-
lates the behavior of the vehicle under test in a traf-
fic situation involving other traffic participants. The
simulation can be performed by varying the model
parameters. During the simulation, the scenario seg-
ments and road features can also be altered by means
of scripting language. In our approach, the sce-
nario generation process is performed directly on the
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
490
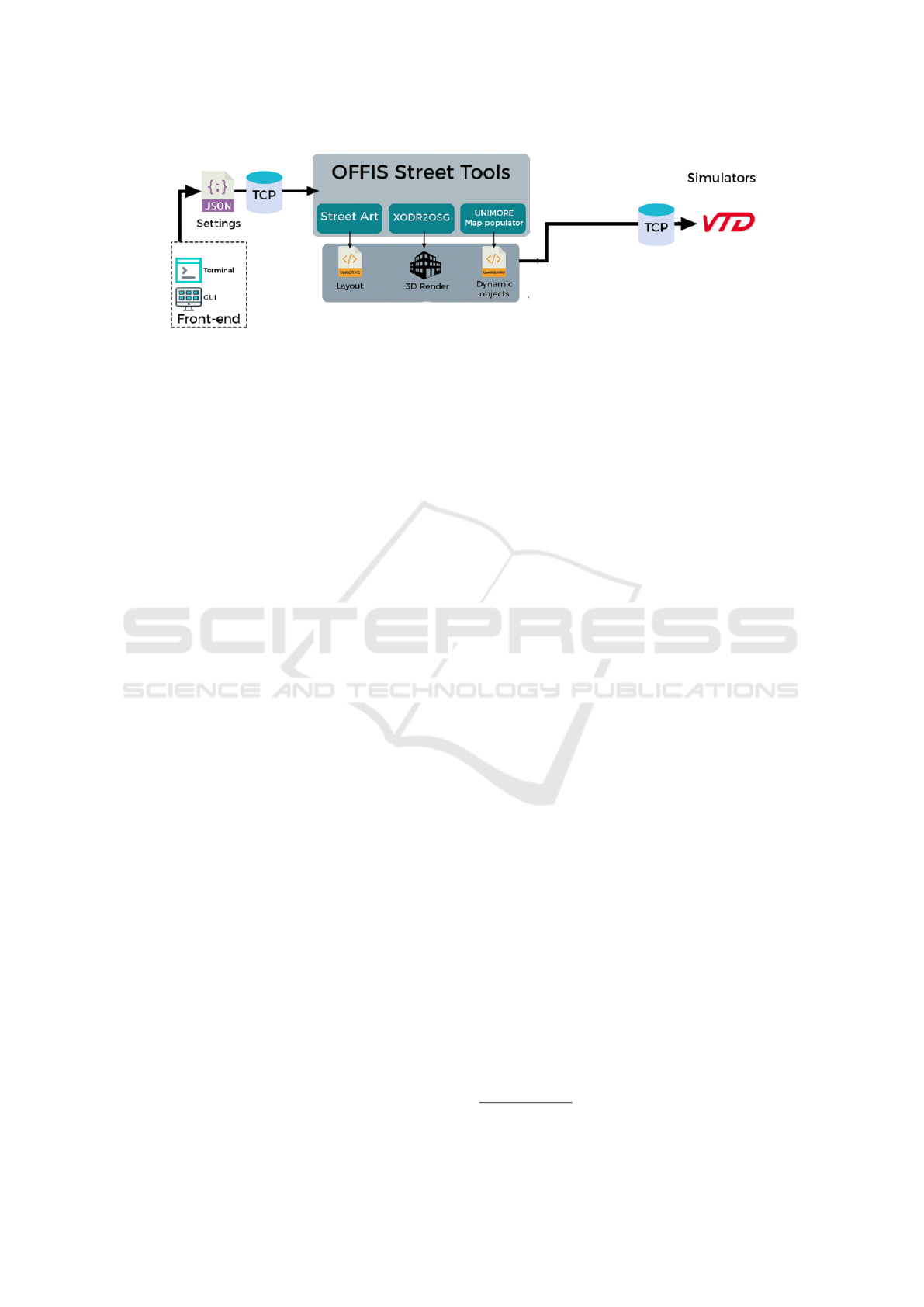
Figure 1: The scenario generation toolchain.
OpenSCENARIO structures and parking environment
model is proposed.
The example in (Matlab, 2019) shows how Mat-
lab Simulink Automated Driving Toolbox can be used
to build and test an automated parking valet system.
The toolbox provides algorithms for designing, sim-
ulating, and testing multiple aspects of autonomous
driving systems like perception, sensor fusion, path
planning and traffic simulation. It features also the
Driving Scenario Designer to design synthetic driv-
ing scenarios. In our tool, the scenarios are gen-
erated automatically given the input parameters and
can be further loaded in Matlab through the Open-
DRIVE format.
In (Zhou and del Re, 2018) the authors identify
the critical scenarios based on the data collected from
the accidents. These data can be used in our approach
to set the scenario generation parameters.
2.3 Parking Sites Simulation
Several works propose the simulation techniques
for the parking maneuver (Heinen et al., 2015;
de Oliveira Andrade et al., 2011; Schwesinger et al.,
2016). For instance, in (Schwesinger et al., 2016) the
required parking spot width for the parking maneuver
is evaluated in simulation. None of these works con-
sider other traffic participants. The focus of our paper
is on the simulation of the entire traffic in the parking
environments. In (Sch
¨
onemann et al., 2019) the au-
thors study the parking maneuvers and derive analyti-
cally the minimum safety distance between traffic par-
ticipants. Our framework can be used to derive em-
pirically certain parameters important from the safety
perspective but its main goal is in identifying mal-
function and corner cases of the autonomous driving
algorithms in complex traffic situations.
Stanford’s robot Junior (Montemerlo et al., 2009)
was equipped with separate planners for common
road navigation and parking slot navigation. In
(L
¨
oper et al., 2013; Tcheumadjeu et al., 2018; Min
and Choi, 2013; Banzhaf et al., 2017; Chirca et al.,
2015) the valet parking prototypes with a fully auto-
mated navigation and monitoring are described. The
focus of these works is on system architecture and im-
plementation. The aspects related to the safety and
simulation are not covered.
3 SCENARIO GENERATOR
In this section, we present the scenario generation
process, breaking it into two separate parts: static and
dynamic content generation.
The static content is constituted by the road net-
work (e.g. roads) with the road objects (e.g. traffic
signs, road surface marking, cars) and their detailed
topological and topographical order. Since most of
the driving simulators require a similar static content,
several standards were developed. The one that has
gained traction in recent years is OpenDRIVE. The
format stores the static content data in an XML file
that describes various features and geometry of the
road and its surrounding.
The dynamic content specifies the time-variant be-
havior of all the active entities that take part in the
simulation (e.g. vehicles and pedestrians). Actions of
traffic participants (e.g. lane change) and road infras-
tructure (e.g. change of a traffic control signal) are
triggered by conditional events (e.g. vehicle’s posi-
tion is ten meters to the pedestrian). OpenSCENARIO
is a commonly used description of the dynamic con-
tent for driving and traffic simulators. It describes the
traffic actions in a hierarchical structure of XML file
as a storyboard subdivided into stories, acts, and se-
quences.
In our framework, the scenario generation process
is orchestrated by the Street Tools, a non-free aca-
demic tool suite from OFFIS
1
. It includes three plu-
gins: static content generation, dynamic content gen-
eration, and 3D rendering. Figure 1 depicts the struc-
ture of the scenario generator. The first plugin, map-
1
OFFIS – Institut f
¨
ur Informatik, www.offis.de
An Automatic Scenario Generator for Validation of Automated Valet Parking Systems
491
generator, randomly creates a road network, while the
second plugin, map-populator, populates it with dy-
namic objects. The 3D rendering plugin is beyond
the scope of this work. Because of its open and mod-
ular design, we decided to use VTD as environment
simulation software. Hereafter, we detail the plugins
for map-generation and map-population.
3.1 Static Content: Map Generation
We use the StreetArt from OFFIS to generate the syn-
thetic maps of the parking sites. The maps are au-
tomatically assembled from the tileset composed of
straight roads, 90 degrees bends, roadside parking
slots, three-way and four-way junctions. Each tile of
the set has its own definition in an OpenDRIVE file,
with absolute position, fixed-length width, and park-
ing slots. The generated layout file is simply a collec-
tion of these tiles which have been properly arranged
and offsetted by the algorithm. The generation pa-
rameters (e.g. parking area size, number of parking
slots) are specified by the user and the final layout is
saved in the OpenDRIVE format.
An OpenDRIVE file begins with a header element
that has time and version as the attributes. The road
network is specified with street elements (road) and
intersections (junction). Each element has a unique
ID attribute and can be linked with the other elements
(link). Street elements can have another street or in-
tersection element as a predecessor and successor.
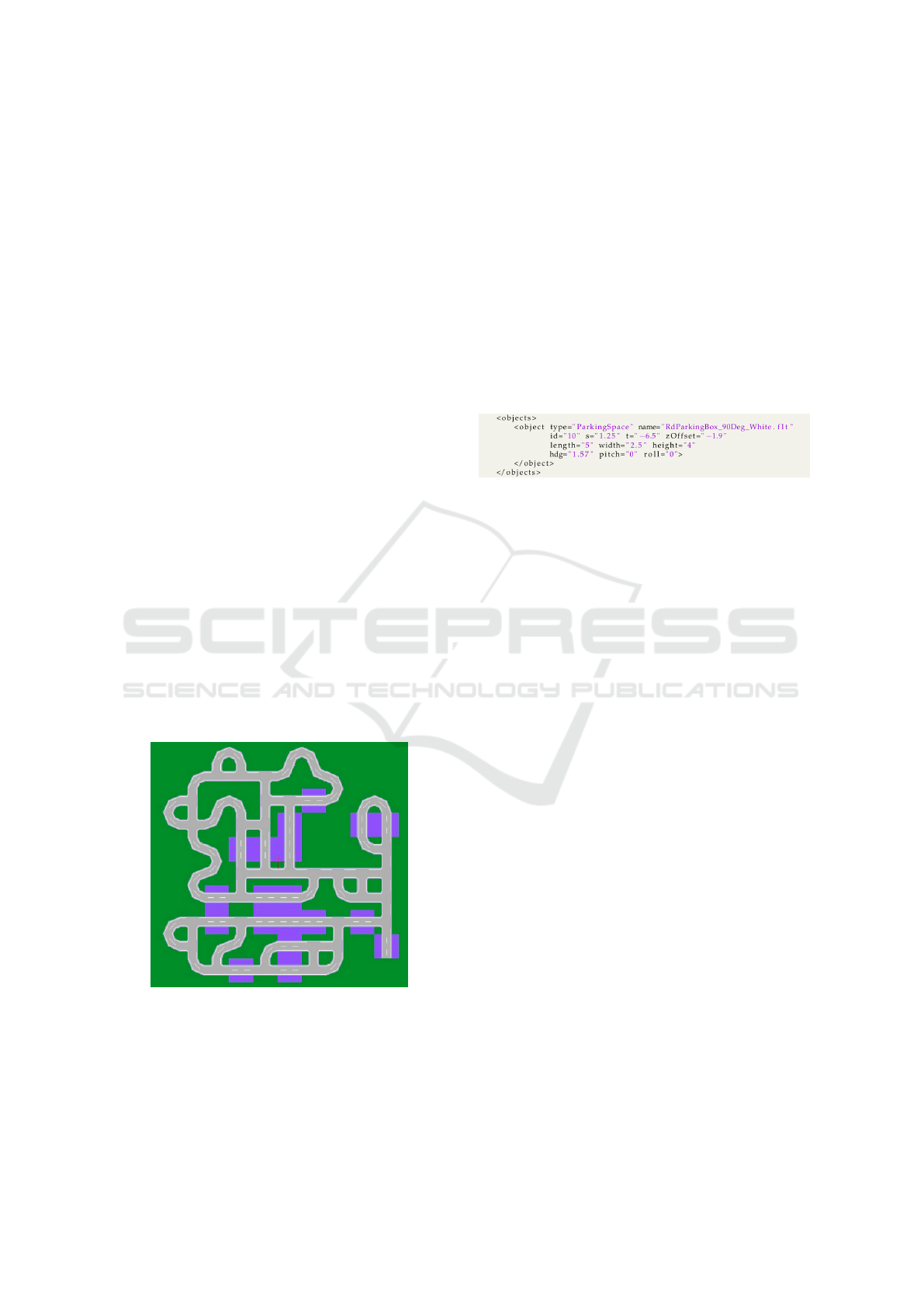
Figure 2 shows an example of a synthetically gen-
erated map.
Figure 2: A synthetic map generated by StreetArt.
3.2 Dynamic Content: Map Population
The map populator is the plugin that we implemented
to automatize the vehicle placement on the parking
site maps and the behavior assignment for the various
traffic participants. The safety engineer is no longer
burdened with a tedious task of manually placing the
vehicles and specifying their behaviors. The scenario
is now automatically generated according to the user-
defined parameters.
The map populator permits to specify the number
of parked cars, the number of driving cars, and the
probabilities of different actions that these cars can
undertake.
The coordinates of the parking slot, its orientation
with regards to the road and the car parked on it are
calculated and added to the structure describing the
road map of a given scenario. Figure 3 shows an XML
snippet with a sample parking slot.
Figure 3: XML snippet with parking slot definition.
The driving cars are randomly placed on the road
network and one of them is selected as the ego car
(i.e. the car under test). The user defines the ratio of
the cars that are parking and those that are cruising in
the autonomous mode.
Each parking car is assigned a path towards a dis-
tinct unoccupied parking slot (reachability from the
initial point is verified). In the XML file, a path is
defined as a sequence of roads and a routing strategy
(e.g. shortest, fastest, least intersections or random).
The path is generated by selecting randomly the start
and the destination from the set of road elements (the
destination is chosen from the road subset with lateral
parking slots).
At the destination, the car performs a parking ma-
neuver. The type of parking maneuver depends upon
the car relative position to the parking slot (see de-
tailed description in the next section). For parking
maneuver and for exiting maneuver specific trajec-
tories are designed. A trajectory is defined as a se-
quence of vertexes with a specific shape (e.g. poly-
line, spline or clothoid). We model the parking trajec-
tory by three way-points and a counter that is incre-
mented at each way-point and triggers a predefined
action (e.g. reduce the speed, stop).
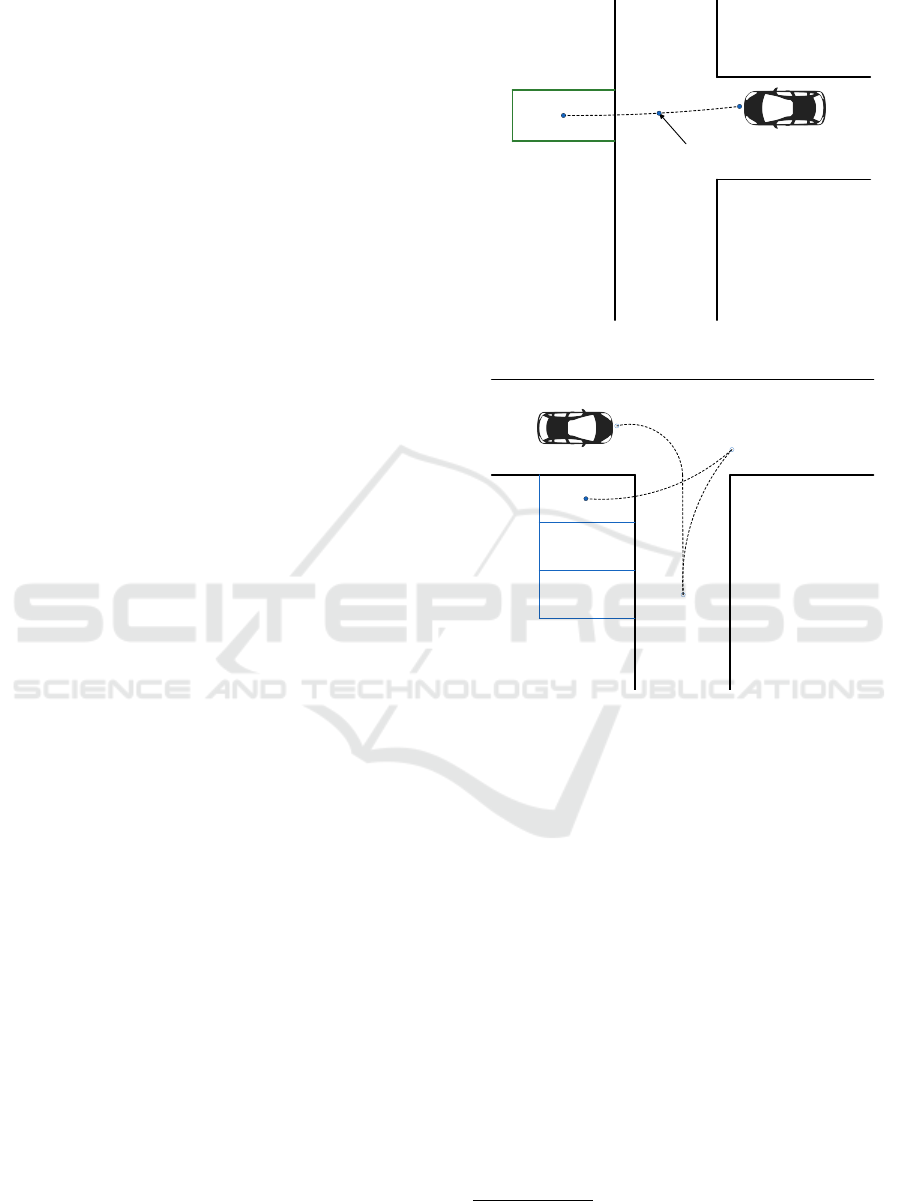
Once the parking maneuver is completed and the
car is stopped, the driver can exit after a random
amount of time and walk along a simple pathshape
towards the parking exit. Figure 4 shows a driver that
has exited a parked car. The ratio of exiting drivers is
tunable and can be disabled for the fully autonomous
parking systems.
The cars cruising in the autonomous mode can
make sudden stops when the ego car is within a given
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
492

Figure 4: Driver exiting a parked car.
range to simulate the behavior of an undecided driver
or a car malfunction.
Figure 5: Car exiting its slot at the approach of the ego car.
A specified number of parked cars is randomly
placed on the free parking slots. Some of them can
suddenly exit their parking slots at the approach of
the ego car and re-enter the traffic (see Figure 5). The
distance to the ego car that activates the action, as well
as the number of cars implementing this behavior, are
specified by the user.
During our test/experiments, we were able to gen-
erate batches of 10 parking scenarios with 3+1 (ego)
vehicles within approximately 70-80 seconds.
4 PARKING MANEUVERS
The extensive simulation allowed us to identify a set
of different parking maneuvers to park the vehicle
aligned and accurately within the spot. In this section,
we detail three basic parking maneuvers implemented
in the map populator.
The driveable path of the car towards its parking
slot is given in the scenario by the identifier of the ini-
tial and the final road tile. The simulator finds and as-
signs to the car a path between these two tiles. When
the car reaches its final destination, it must enter the
parking slot. However, the parking maneuver is not
defined in the OpenSCENARIO standard. We there-
fore specify it as a sequence of absolute coordinates
and associated actions. The parking driveable path
depends on the vehicle’s position relative to the tar-
get parking slot, the road geometry, and the vehicle’s
turning radius.
4.1 Forward Bay Parking
The forward bay parking maneuver is used when the
target parking slot is situated perpendicularly to the
road. For the standard bay parking maneuver, we se-
lect three control points (P
0
, P
1
and P
2
) on the parking
trajectory (see Figure 6) at which the vehicle under-
takes the following actions:
P
0
- disable autonomous driving mode and reduce
the vehicle speed,
P
1
- follow the predefined arc trajectory,
P
2
- stop.
P0
P1
straight
P2
curve
1
P0
P1
curve
2
hdg
Figure 6: Bay parking maneuver.
The coordinates of the control points are given as:
P
0
=
(
x
0
= EndRoad.x
y
0
= EndRoad.y
P
1
=
(
x
1
= x
0
+ ∆ · cos(EndRoad.hdg)
y
1
= y
0
+ ∆ · sin(EndRoad.hdg)
P
2
=
(
x
2
= ParkingSlot.x
y
2
= ParkingSlot.y
with:
An Automatic Scenario Generator for Validation of Automated Valet Parking Systems
493
• EndRoad - the destination road element,
• ParkingSlot - the selected parking slot,
• x - x coordinate of road element,
• y - y coordinate of road element,
• hdg - the angle of the ParkingSlot relative to the
EndRoad direction,
• ∆
∆
∆ - parameter depending on the distance be-
tween the beginning of the EndRoad and the
ParkingSlot, the default width of a single parking
slot, the vehicle’s turning radius.
The shape of the curvature (spline) depends on the
definition of the steering angle of the car’s model. As
the figure shows, for a single parking maneuver we
generate two symmetric trajectories. This is because
the car driving in the simulator autopilot mode can
arrive from one of two opposing directions and the
actual path cannot be determined before running the
simulation. The trigonometric functions, sine and co-
sine, are used to determine P
1
in more complex sce-
narios when the road is not perpendicular to the X or
Y axes. By using sine and cosine, we can apply the
same method to determine the parking trajectory for
any orientation of the road.
4.2 Junction Parking Slot
When the car approaches the parking slot from the
front (Figure 7), it performs the parking maneuver
with the coordinates of the points P
0
and P
1
modified
as follows:
P
0
=
(
x
0
= FrontRoad.x
y
0
= FrontRoad.y
P
1
=
(
x
1
= ParkingSlot.x + ∆ · cos(hdg)
y
1
= ParkingSlot.y + ∆ · sin(hdg)
4.3 Margin Parking Slot
As shown in Figure 8, in this case, the space is too nar-
row to park the car with a single turn. Therefore, the
entire maneuver is decomposed into three segments:
two forward and one reverse. The first segment tra-
jectory transposes the vehicle parallel to the parking
spot. Then, the reverse segment trajectory moves the
car away from the parking spot but, at the same time,
turns the car’s front towards it. The extra distance and
the new car orientation resulting from moving away
from the parking slot makes the next phase easier. In
the end, the forward-path drives the car into the tar-
get slot.
P2
P1
P0
Figure 7: Parking maneuver on junction.
P0
arc
1
P1
P2
arc
2
P3
arc
3
Figure 8: Maneuvers for margin parking slots.
The first arc starts from the end of the penultimate
road element in the path leading to the parking slot
(PrevEndRoad) and its coordinates are given as:
P
0
=
(
x
0
= PrevEndRoad.x
y
0
= PrevEndRoad.y
P
1
=
(
x
1
= EndRoad.x + ∆ · cos(hdg)
y
1
= EndRoad.y + ∆ · sin(hdg)
The second arc forms a ”V” with the first arc and is
done in reverse. Its end coordinate is given by
2
:
P
2
=
(
x
2
= PrevEndRoad.x + ∆ · cos(hdg)
y
2
= ParkingSlot.y − ∆ · sin(hdg)
Finally, the path to drive into the parking space:
P
3
=
(
x
3
= ParkingSlot.x
y
3
= ParkingSlot.y
2
The parameter ∆ can be replaced by the separate pa-
rameters ∆
x
and ∆
y
for x and y coordinates.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
494

5 CONCLUSIONS
In this work, we introduced a toolchain for automatic
generation of random scenarios for autonomous driv-
ing in parking sites. The scenarios are described in
OpenSCENARIO format and can be played in vari-
ous driving simulators. The toolchain was integrated
into a broader test system comprising of autonomous
vehicle control logic, vehicle dynamic, sensors, traf-
fic observer, real data database (Sch
¨
onemann et al.,
2019; Esen et al., 2020).
In our ongoing work, we are extending the catalog
of parking maneuvers (e.g. reverse and parallel bay)
and exporting the generated scenarios to the simula-
tors based on the commercial game engines.
ACKNOWLEDGEMENTS
This work has been conducted within the ENABLE-
S3 project that has received funding from the EC-
SEL Joint Undertaking under Grant Agreement no.
692455. This Joint Undertaking receives support
from the European Union’s HORIZON 2020 research
and innovation programme and Austria, Denmark,
Germany, Finland, Czech Republic, Italy, Spain, Por-
tugal, Poland, Ireland, Belgium, France, Netherlands,
United Kingdom, Slovakia, Norway.
This work was also supported by the Prystine
Project, funded by Electronic Components and Sys-
tems for European Leadership Joint Undertaking
(ECSEL JU) in collaboration with the European
Union’s H2020 Framework Programme and National
Authorities, under grant agreement no. 783190.
Tomasz Kloda was supported by the Chair for
Cyber-Physical Systems in Production Engineering at
TUM and the Alexander von Humboldt Foundation.
REFERENCES
Automotive World (2018). Daimler and Bosch
jointly premiere automated valet parking in
China. https://www.automotiveworld.com/news-
releases/daimler-and-bosch-jointly-premiere-
automated-valet-parking-in-china/.
Banzhaf, H., Nienh
¨
user, D., Knoop, S., and Z
¨
ollner, J. M.
(2017). The future of parking: A survey on automated
valet parking with an outlook on high density park-
ing. In 2017 IEEE Intelligent Vehicles Symposium
(IV), pages 1827–1834.
Chirca, M., Chapuis, R., and Lenain, R. (2015). Au-
tonomous valet parking system architecture. In 2015
IEEE 18th International Conference on Intelligent
Transportation Systems, pages 2619–2624.
de Oliveira Andrade, K., Hernandes, A. C., and Becker, M.
(2011). A rule-based controller simulation for an au-
tonomous parallel parking of a car-like robot using
laser sensors. In American Scientific Research Jour-
nal for Engineering, Technology, and Sciences.
Dosovitskiy, A., Ros, G., Codevilla, F., Lopez, A., and
Koltun, V. (2017). CARLA: An open urban driving
simulator. In Proceedings of the 1st Annual Confer-
ence on Robot Learning, pages 1–16.
dSPACE (2017). Automotive Simulation Models Traf-
fic. https://www.dspace.com/shared/data/pdf/2017/
dSPACE ASM Traffic Product information 2017
English.pdf.
Esen, H., Kneissl, M., Molin, A., vom Dorff, S., B
¨
oddeker,
B., M
¨
ohlmann, E., Brockmeyer, U., Teige, T., Padilla,
G. G., and Kalisvaart, S. (2020). Validation of Auto-
mated Valet Parking, pages 207–220. Springer Inter-
national Publishing, Cham.
Heinen, M. R., Os
´
orio, F. S., Heinen, F. J., and Kelber, C.
(2015). Seva3d: Autonomous vehicles parking simu-
lator in a three-dimensional environment.
ISO (2011). ISO 26262: Road vehicles - functional
safety. Geneva, Switzerland. International Organiza-
tion for Standardization.
L
¨
oper, C., Brunken, C., Thomaidis, G., Lapoehn, S.,
Fouopi, P. P., Mosebach, H., and K
¨
oster, F. (2013).
Automated valet parking as part of an integrated travel
assistance. In 16th International IEEE Conference on
Intelligent Transportation Systems (ITSC 2013), pages
2341–2348.
Matlab (2019). Automated Parking Valet in Simulink.
https://www.mathworks.com/help/driving/examples/
automated-parking-valet-in-simulink.html.
Society of Automotive Engineers (2018). Taxonomy and
Definitions for Terms Related to Driving Automation
Systems for On-Road Motor Vehicles.
Min, K. and Choi, J. (2013). Design and implementation
of autonomous vehicle valet parking system. In 16th
International IEEE Conference on Intelligent Trans-
portation Systems (ITSC 2013), pages 2082–2087.
Montemerlo, M., Becker, J., Bhat, S., Dahlkamp, H., Dol-
gov, D., Ettinger, S., Haehnel, D., Hilden, T., Hoff-
mann, G., Huhnke, B., Johnston, D., Klumpp, S.,
Langer, D., Levandowski, A., Levinson, J., Marcil,
J., Orenstein, D., Paefgen, J., Penny, I., Petrovskaya,
A., Pflueger, M., Stanek, G., Stavens, D., Vogt, A.,
and Thrun, S. (2009). Junior: The Stanford Entry in
the Urban Challenge, pages 91–123. Springer Berlin
Heidelberg, Berlin, Heidelberg.
Sch
¨
onemann, V., Duschek, M., and Winner, H.
(2019). Maneuver-based adaptive safety zone
for infrastructure-supported automated valet parking.
In Proceedings of the 5th International Conference on
Vehicle Technology and Intelligent Transport Systems,
VEHITS 2019, Heraklion, Crete, Greece, May 3-5,
2019, pages 343–351.
Sch
¨
onemann, V., Winner, H., Glock, T., Otten, S., Sax, E.,
Boeddeker, B., Verhaeg, G., Tronci, F., and Padilla,
G. G. (2019). Scenario-based functional safety for au-
tomated driving on the example of valet parking. In
An Automatic Scenario Generator for Validation of Automated Valet Parking Systems
495

Arai, K., Kapoor, S., and Bhatia, R., editors, Advances
in Information and Communication Networks, pages
53–64, Cham. Springer International Publishing.
Schwesinger, U., B
¨
urki, M., Timpner, J., Rottmann, S.,
Wolf, L., Paz, L. M., Grimmett, H., Posner, I., New-
man, P., H
¨
ane, C., Heng, L., Lee, G. H., Sattler,
T., Pollefeys, M., Allodi, M., Valenti, F., Mimura,
K., Goebelsmann, B., Derendarz, W., M
¨
uhlfellner, P.,
Wonneberger, S., Waldmann, R., Grysczyk, S., Last,
C., Br
¨
uning, S., Horstmann, S., Bartholom
¨
aus, M.,
Brummer, C., Stellmacher, M., Pucks, F., Nicklas, M.,
and Siegwart, R. (2016). Automated valet parking and
charging for e-mobility. In 2016 IEEE Intelligent Ve-
hicles Symposium (IV), pages 157–164.
Syed Ahamed, M. F., Tewolde, G., and Kwon, J. (2018).
Software-in-the-loop modeling and simulation frame-
work for autonomous vehicles. In 2018 IEEE Interna-
tional Conference on Electro/Information Technology
(EIT), pages 0305–0310.
TASS International (2019). PreScan: sim-
ulation of ADAS & active safety.
https://www.tassinternational.com/prescan.
Tcheumadjeu, L. T., Andert, F., Tang, Q., Sohr, A., Kaul,
R., Belz, J., Lutz, P., Maier, M., M
¨
uller, M. G.,
and St
¨
urzl, W. (2018). Integration of an automated
valet parking service into an internet of things plat-
form. 2018 21st International Conference on Intelli-
gent Transportation Systems (ITSC), pages 662–668.
Tecnalia (2019). Dynacar. http://www.dynacar.es.
VTD (2019). VTD Vires Virtual Test Drive.
https://vires.com/vtd-vires-virtual-test-drive/.
Wymann, B., Dimitrakakisy, C., Sumnery, A., and Guion-
neauz, C. (2015). Torcs: The open racing car simula-
tor.
Zhou, J. and del Re, L. (2018). Safety verification of adas by
collision-free boundary searching of a parameterized
catalog. In 2018 Annual American Control Confer-
ence (ACC), pages 4790–4795.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
496
