
Multiple Path Prediction for Traffic Scenes using LSTMs and Mixture
Density Models
Jaime B. Fernandez
a
, Suzanne Little
b
and Noel E. O’connor
c
Insight Centre for Data Analytics, Dublin City University, Dublin, Ireland
Keywords:
Multiple Path Prediction, Traffic Scenes, LSTMs, MDNs, Time Series.
Abstract:
This work presents an analysis of predicting multiple future paths of moving objects in traffic scenes by
leveraging Long Short-Term Memory architectures (LSTMs) and Mixture Density Networks (MDNs) in a
single-shot manner. Path prediction allows estimating the future positions of objects. This is useful in impor-
tant applications such as security monitoring systems, Autonomous Driver Assistance Systems and assistive
technologies. Normal approaches use observed positions (tracklets) of objects in video frames to predict their
future paths as a sequence of position values. This can be treated as a time series. LSTMs have achieved good
performance when dealing with time series. However, LSTMs have the limitation of only predicting a single
path per tracklet. Path prediction is not a deterministic task and requires predicting with a level of uncertainty.
Predicting multiple paths instead of a single one is therefore a more realistic manner of approaching this task.
In this work, predicting a set of future paths with associated uncertainty was archived by combining LSTMs
and MDNs. The evaluation was made on the KITTI and the CityFlow datasets on three type of objects, four
prediction horizons and two different points of view (image coordinates and birds-eye view).
1 INTRODUCTION
Given a scene, knowing where an object is currently
located is useful information to be able to interact
in such environment. However, nowadays, knowing
where that object will be located in the near future is
of great importance in the field of motion analysis for
applications such as security monitoring systems, Au-
tonomous Driver Assistance Systems (ADAS), risk
analysis and assistive technologies such as navigation
for blind people to avoid collision.
Among motion prediction research, one specific
task is path prediction, where the past positions
(tracks) of objects are used to predict their future path.
Several approaches have been developed (Madhavan
et al., 2006; Schneider and Gavrila, 2013; Okamoto
et al., 2017). Among recent approaches, LSTM ar-
chitectures have been applied to this challenge due to
their capability of getting information from sequences
and then predicting using that previous information.
The main focus of this work is to show a tech-
nique that allows for forecasting a set of paths, along
a
https://orcid.org/0000-0001-9774-3879
b
https://orcid.org/0000-0003-3281-3471
c
https://orcid.org/0000-0002-4033-9135
with their related probability, instead of a single one
as in traditional approaches. We evaluate its perfor-
mance on traffic scenarios from the KITTI (Geiger
et al., 2013) and CityFlow (Tang et al., 2019) datasets
to predict the future position of objects, such as pedes-
trians, vehicles and cyclists, for four prediction hori-
zons (P.H.) on two selected datasets. In addition to
using the most common position data (image coordi-
nates in pixels), we also use a birds-eye view (metres)
(BEV) on the KITTI dataset since it is a more realistic
measurement of the real world.
For the remainder of this paper, Section II presents
relevant related works in this field, emphasising
works using Long-Short Term Memory architectures
(LSTMs) and Mixture Density Networks (MDNs).
Section III describes the problem; Section IV presents
our approach; Section V and VI present the experi-
mental setup and results respectively. Finally in Sec-
tion VII conclusions are given.
2 RELATED WORKS
A variety of techniques for path prediction have
been developed, from the well known Kalman Filter
(KF) (Kalman, 1960; Madhavan et al., 2006; Schnei-
Fernandez, J., Little, S. and O’connor, N.
Multiple Path Prediction for Traffic Scenes using LSTMs and Mixture Density Models.
DOI: 10.5220/0009412204810488
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 481-488
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
481

der and Gavrila, 2013; Jin et al., 2018), some prob-
abilistic approaches (Keller and Gavrila, 2014), ap-
proaches based on prototype trajectories (Vasquez
and Fraichard, 2004; Morris and Trivedi, 2008; Yoo
et al., 2016; Bian et al., 2018) or based on manoeuvre
intention (Madhavan et al., 2006; Keller and Gavrila,
2014) to Recurrent Neural Networks (RNNs) and its
variants that have shown good performance on se-
quential data.
LSTM architectures are currently used in areas
such as translation, time series prediction and trajec-
tory prediction. LSTMs are capable of getting infor-
mation from sequences and then predicting using that
previous information.
One interesting work is shown in (Alahi et al.,
2016), where they address the problem of predict-
ing the trajectory of pedestrians in crowded spaces
using static cameras. This approach, called Social
LSTM, uses one LSTM for each of the pedestrians
in the scene. “Social” refers to the use of the trajec-
tory of other pedestrians that is taken into account to
predict the trajectory of a single one. They use a sep-
arate LSTM for each trajectory and then connect each
LSTM to other through a Social pooling layer. Sim-
ilar work is presented in (Altch
´
e and de La Fortelle,
2017) where they use LSTMs to predict the trajectory
of vehicles in highways from a fixed top-view.
In (Bartoli et al., 2018) multiple cameras were
used to predict the trajectory of people in crowded
scenes and (Kim et al., 2017) predict the trajectory
of vehicles in an occupancy grid from the point of
view of an ego-vehicle. A more closely related work
to this paper is presented in (Bhattacharyya et al.,
2017), here they predict the future path of pedestrians
using RNNs as encoder-decoders and also include the
prediction of the odometry of the ego-vehicle.
2.1 Mixture Density Networks
This type of network was introduced by (Bishop,
1994), Mixture Density Networks (MDNs) consist of
a feed-forward neural network whose outputs deter-
mine the parameters in a mixture density model. The
mixture model then represents the conditional proba-
bility density function of the target variables, condi-
tioned in the input vector to the neural network.
Since then, MDNs have been applied on differ-
ent works such as modeling of handwriting (Graves,
2013) or (Ha and Eck, 2017) for sketch drawing gen-
eration. At this point MDNs were not combined with
standard Neural Networks, such as multi-layer per-
ception, but with more complex architectures such as
RNNs, more specifically with LSTMs. An interesting
work is shown in (Ellefsen et al., 2019) where they
generate images based on a sequence of past observed
images using LSTMs and MDNs and also make a
study on the role of the different mixture components.
A highly related work is presented in (Zyner et al.,
2019), here the authors predict the intention of the
driver (left, straight, right, u-turn) at 5 determined in-
tersections in a static birds-eye view by predicting the
future trajectories. In the intersection the possible tra-
jectories of a vehicle are constrained to the five scenes
and they apply clustering to the set of trajectories on
the dataset to filter the predictions.
In this work, different to (Bartoli et al., 2018),
path prediction is performed using cameras mounted
on a moving vehicle and from surveillance. Instead
of using one LSTM per object like in (Alahi et al.,
2016), we use a common model for all objects of the
same class. Also the prediction of the future path
is made by two stacked vanilla LSTMs with a final
MDN layer in a single-shot manner instead of using
encoder-decoders or recursive multi-step forecasting.
Different to (Zyner et al., 2019), we evaluate on three
different object classes available in KITTI and one
class in CityFlow dataset where more unconstrained
scenarios than only intersections can be found. We
also report the results from both, the image (pixels)
and a birds-eye point of view (metres) using available
3D information.
3 PROBLEM DEFINITION
Path prediction research using RNNs has shown good
performance. However, most of the approaches have
the limitation of only predicting a single path per
tracklet. Path prediction is not a deterministic task
and requires predicting with a level of uncertainty. In
addition, generating a set of paths instead of a sin-
gle one is a more realistic manner of predicting the
possible position of objects. Some works only focus
on specific scenarios such as intersections, crossing
roads and highways from a top view where the move-
ments of the objects are limited by the shape of the
scenarios. Nevertheless, real-life traffic scenarios are
more diverse and consequently the movements of the
objects in that environment are also diverse.
3.1 Data Definition
A path P is a set of tracks, tr, that contains informa-
tion such as tr(x, y) position (coordinates) of an object
that travels a given space, P = {tr
t1
, tr
t2
, ..., tr
tlength
}.
Each tr is a measure given for a sensor in intervals
of time and in an ordered manner, tr(x, y, time). This
means that a path is a sequence of measurements of
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
482

Figure 1: General Proposed Approach.
the same variable collected over time, where the order
matters, resulting in a time series. Because of this, a
path can be seen as a multivariate time series that has
two time-dependent variables. Each variable depends
on its past values, and this dependency is used for
forecasting future values. So the task of path predic-
tion can be seen as forecasting a multivariate multi-
step time series.
In this work we apply a sliding window over one
track per time then these smaller segments are split
into two vectors of equal size. The first vector is the
observed tracklets Tr
O
= [tr
O
t1
, tr
O
t2
, ..., tr
O
tobs
] and the
second vector is its respective ground truth tracklet
Tr
G
= [tr
G
t1
, tr
G
t2
, ..., tr
G
t pred
]. The predicted vector of
each Tr
O
is called Tr
P
= [tr
P
t1
, tr
P
t2
, ..., tr
P
t pred
]. We aim
to predict Tr
P
based on the observed tracks Tr
O
but
instead of only predicting one Tr
P
we want to predict
a set, Tr
PS
, of m Tr
P
per each Tr
O
with its respec-
tive probability such that Tr
PS
= [Tr
P
1
, Tr
P
2
, ..., Tr
P
m
]
and Tr
P
x
= [Tr
P
, Probability]:
4 APPROACH
LSTMs have shown good performance when dealing
with time series , so in this approach an LSTM archi-
tecture is used. LSTMs can be used in different man-
ners, one is Multiple Output Strategy (MOS). MOS
develops one model to predict an entire sequence in
a one-shot manner, this output a vector directly that
can be interpreted as a multi-step forecast. However,
at this stage the problem of only being able to pre-
dict a single path per observed trajectory still remains.
To overcome this limitation we use the well known
properties of Mixture Density Models (MDMs) and
inspired by (Bishop, 1994), we propose to use LSTMs
with MDMs as a MDN layer, as shown in Figure 1.
4.1 Model Architecture
The core of the model are two stacked LSTMs with a
final MDN layer. The number of inputs and outputs
depends on the length of the observed tracklet, Tr
O
,
and the number of steps to be predicted ahead, Tr
P
.
The Keras API
1
and the Keras MDN Layer library
2
were used to obtain the implementation of the LSTM
architecture and the MDN Layer respectively.
4.2 Multiple Trajectory Extraction
For this phase, the output of the model was processed
as follow:
1. Extracting mean, standard deviation and mixing
proportions from output. The model outputs a
single array per Tr
O
where the first NMixes ∗
Out putLength columns are the means, the second
NMixes ∗ Out putLength columns are the standard
deviations and the last NMixes are the mixing pro-
portions.
2. Each mean is considered as a possible path and its
mixing proportion is the probability of each path.
5 EXPERIMENTAL SETUP
5.1 Datasets
Two datasets were chosen:
• KITTI (Geiger et al., 2013): provides informa-
tion recorded from a camera mounted on a vehicle
and is one of the most popular datasets for use in
mobile robotics and autonomous driving. It also
provides 21 sequences with the tracking labels of
the objects in image coordinates and 3D informa-
tion, as visualised in Fig. 2. The resolution of the
videos is 1242x375p and are recorded at 10 FPS.
• CityFlow (Tang et al., 2019): provides informa-
tion on objects from surveillance cameras in im-
age coordinate format. The minimum video res-
olution is 1920x1080p and the majority of the
1
https://keras.io/
2
https://pypi.org/project/keras-mdn-layer/
Multiple Path Prediction for Traffic Scenes using LSTMs and Mixture Density Models
483
videos have a frame rate of 10 FPS. The three sce-
narios from training were used, since only these
scenarios contain the tracking labels of the ob-
jects.
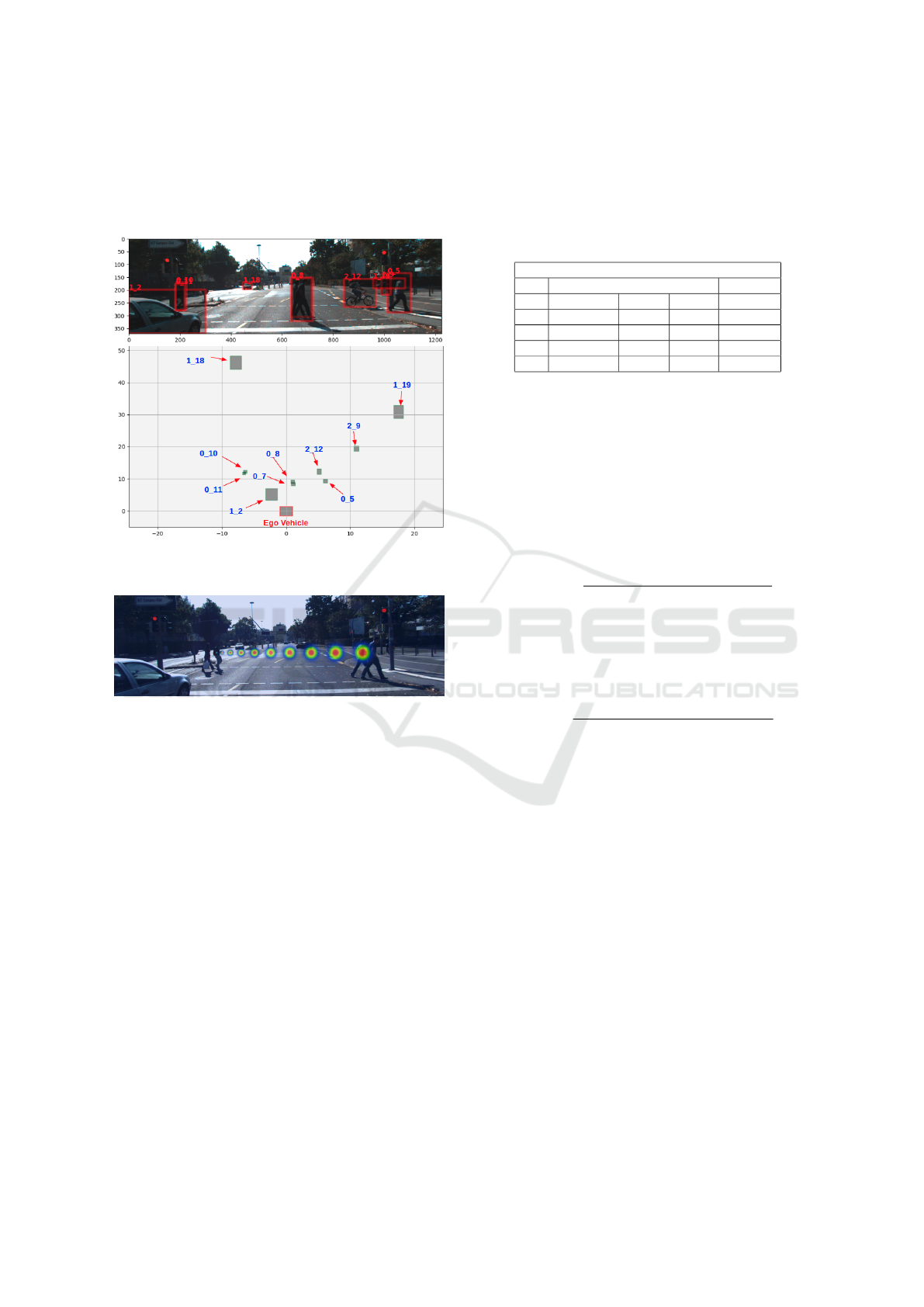
Figure 2: Image Coordinates (Top) and Birds-Eye View
(Bottom).
Figure 3: Heat Maps of 10-100 Pixels (Left to Right) Illus-
trating Pixel Differences in the Real World.
5.2 Data Pre-processing
The data was pre-processed as follows:
1. Convert the dataset to a simpler format with
each track described as follows: [Frame-Num,
Object-Type, Object-Id, X1, Y1, X2, Y2,
Location-X, Location-Y, Location-Z, Dimension-
H, Dimension-W, Dimension-L] for KITTI and
[Frame-Num, Object-Type, Object-Id, X1, Y1,
X2, Y2] for CityFlow.
2. Extract trajectories of each object per sequence.
3. Create tracklets (sub-trajectories) of a certain
length. For each object trajectory, tracklets of size
10, 20, 30 and 40 tracks were extracted.
4. To extract the bottom center of the objects.
5. To translate the tracklets to relative position. This
process consists of setting the first (x, y) position
of each tracklet to (0, 0) and all the following
tracks are adjusted relative to this point.
6. Normalize all tracklets to [0,1].
The table 1 summarizes the number of tracklets
extracted in each dataset. 70% was used for training
and the rest for testing:
Table 1: Size of the Data for All Four P.H. and Objects.
Number of Tracklets
KITTI CityFlow
P.H. Pedestrian Vehicle Cyclist Vehicle
± 5 9992 26112 1605 37480
±10 8551 20454 1285 31164
±15 7330 16031 1028 25936
±20 6312 13027 802 21923
5.3 Evaluation Metrics
The following metrics were used to evaluate the accu-
racy of the trajectory prediction (Alahi et al., 2016):
• Average Displacement Error (ADE): is the
mean square error (MSE) between all estimated
points of every trajectory and the true points:
ADE =
∑
n
i=1
∑
t pred
t=1
[
( ˆx
t
i
−x
t
i
)
2
+( ˆy
t
i
−y
t
i
)
2
]
n(t pred)
(1)
• Final Displacement Error (FDE): is the distance
between the predicted final destination and the
true final destination at the t pred time:
FDE =
∑
n
i=1
h
( ˆx
t pred
i
−x
t pred
i
)
2
+( ˆy
t pred
i
−y
t pred
i
)
2
i
n
(2)
where ( ˆx
t
i
, ˆy
t
i
) are the predicted positions of the
tracklet i at time t, (x
t
i
, y
t
i
) are the actual position
(ground truth) of the tracklet i at time t, and n is the
number of tracklets in the testing set.
5.4 Comparative Study
We compare our approach with two baselines
methodologies to establish that our approach does not
lose accuracy when predicting a set of paths.
• The Kalman Filter (KF): the KF was used with
the Constant Velocity (CV) model. This model
has shown good performance when dealing with
linear movements.
• Vanilla LSTM (VLSTM): this consists of a one
layer LSTM with 128 neurons. This model was
also used in a single-shot manner.
For our proposed model (LSTM with MDM), we
performed two experiments for image coordinates.
Instead of only using two features, (x, y) position of
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
484

objects (LMDN2), we included three additional fea-
tures: height, object area and object area with respect
to the image (LMDN5). This produced a feature vec-
tor of (x, y, h, ob jectA, ob jectAImg).
6 RESULTS
The performance was calculated on four different pre-
diction horizons (P.H.) and for three different objects
– pedestrians, cyclists and vehicles (Cars, Vans or
Trucks). The results are also provided in image coor-
dinates (pixels) and in birds-eye view (metres). Due
to the size of the images, the results show large nu-
merical values in the case of image coordinates. Fig. 3
illustrates the approximate real world implication of
variations in pixels as applied to the KITTI dataset.
Finally, the approach was also evaluated on the gen-
eration of different numbers of paths, two to five. The
results (Tables 2, 3 & 4) show the accuracy of the mix-
ture component with the highest probability and com-
pared with the baseline methods. Examples of pre-
dicting different numbers of paths are shown in the
visualizations (Fig. 4 & 5).
6.1 KITTI
Table 2 shows the performance of the approach for
image coordinates. For all methods, the error in-
creases directly with the predicted horizon; the larger
the P.H. the larger the error. Table 2 shows that our
approach LMDN2 achieves better accuracy than the
two baseline methods. It can also be observed that
the approach LMDN5 showed improvement for short
P.H. in ADE and in several cases for FDE, mostly for
the objects pedestrian and vehicle.
Table 3 presents the results calculated using birds-
eye view (BEV). For most of the cases our approach,
LMDN2, achieves better accuracy than the two base-
line methods. An exception is a significant error in-
crease in the case of the vehicle class for the P.H. of
±10 for both ADE and FDE. Figure 4 shows the re-
sulting set of paths predicted when configuring the
model to have five mixtures. The first 1,000 sam-
ples were printed. The first image (GT) displays the
ground truth paths and the following images from
MDN 1 to MDN 5 present the paths predicted by
each mixture component. The mixtures were ordered
according to descending probability of their compo-
nents – MDN 1 (high probability) to MDN 5 (low
probability). The predicted paths diverge from the
ground truth when the probability of the the compo-
nents used for predicting go from high to low.
6.2 CityFlow
Table 4 presents the performance of the methods on
the CityFlow dataset. For all approaches, similar be-
haviour to that in KITTI can be observed – the error
increases directly with the P.H. Table 4, shows that
our approach LMDN2 achieves better accuracy than
the two baseline methods. The approach LMDN5 (us-
ing 5 features) showed significant improvement over
the method LMDN2 for the P.H. of ±5, ±10, and ±15
for both ADE and FDE.
To predict a set of paths, from 2 to 5, similar be-
haviour to that in KITTI is observed. The predicted
paths diverge from the ground truth when the prob-
ability of the components used for predicting goes
from high to low. Figure 5 depicts one example of
predicting from 2 to 5 sets of paths for a P.H. of ±5.
When the predicted paths are near the GT, the prob-
ability of such a path is high, in contrast, when the
predicted paths are far from the GT, their probability
is low. In some cases, as in figure 5 at C and D left,
the paths are not displayed because the probability of
that path is too low. Scatter plots are an alternative vi-
sualisation of the predicted paths but doesn’t include
their probabilities.
6.3 Discussion
The comparative study shows that LSTMs do not de-
crease their performance when combined with the
MDN. Regarding the method LMDN5, the experi-
ments showed that the extra features lead to better re-
sults overall. This was evidenced in KITTI for short
prediction horizons for the object pedestrian and ve-
hicle and for CityFlow for the object vehicle for P.H.
of less than ±15. The relationship between the accu-
racy of the predicted set of paths and the probability
of each component in the MDN model can be seen in
Figure 4 and Figure 5. The predicted paths are more
similar to the ground truth when the component that is
predicting has high probability. However, those paths
that are being predicted for the components with low
probability are increasingly different to ground truth.
This conclusion is desirable when predicting paths,
since we want to predict possible paths that are closer
to the more probable one.
The approach performs better when predicting in
birds-eye view than when predicting in image coordi-
nates. However, 3D information is not always avail-
able. The reason for this could be that using pix-
els is not the best way of representing the position
of the object in an image since is too sensitive to
small movements of the camera and also of the ob-
jects. Something to consider here is that when pre-
Multiple Path Prediction for Traffic Scenes using LSTMs and Mixture Density Models
485
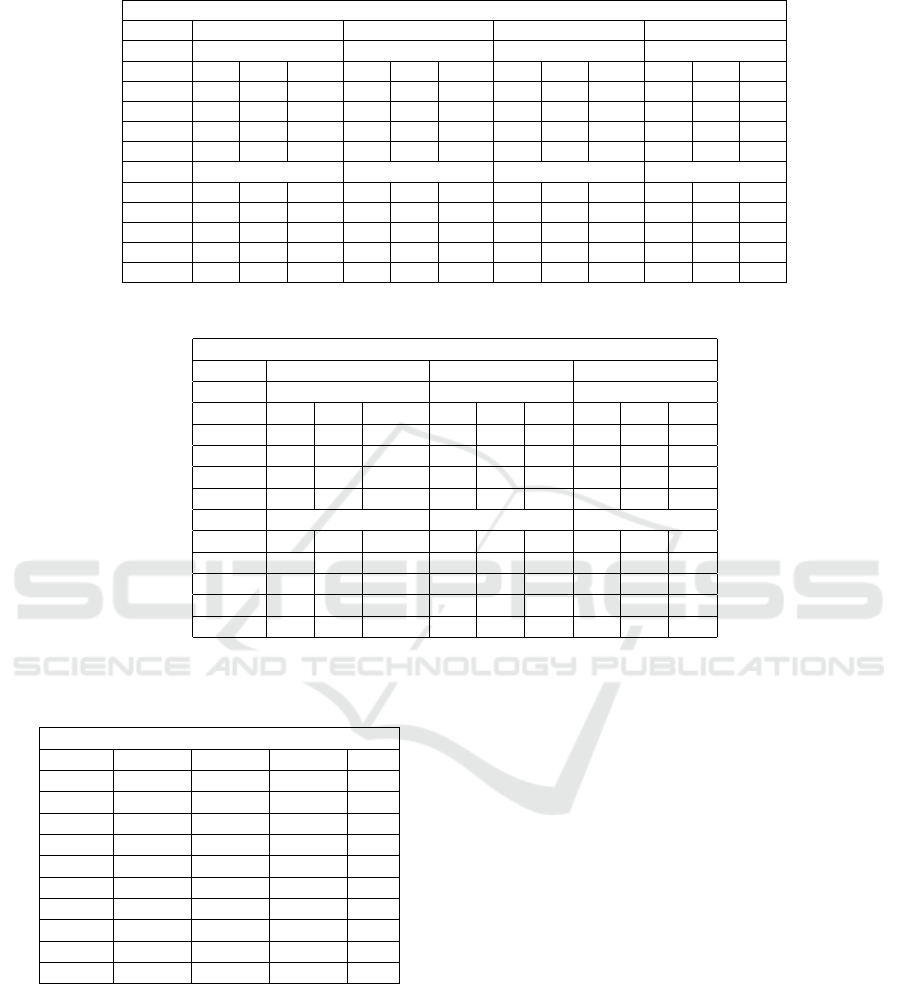
Table 2: Path Prediction Accuracy on KITTI. Image Coordinates.
KITTI. Image Coordinate (Pixels)
Method LMDN5 LMDN2 VLSTM KF
ADE ADE ADE ADE
P. H. Ped. Veh. Cyc. Ped. Veh. Cyc. Ped. Veh. Cyc. Ped. Veh. Cyc.
±5 79 65 232 106 84 107 76 98 94 111 225 143
±10 286 272 329 362 267 261 244 353 160 260 585 287
±15 466 591 1596 660 614 467 802 668 1163 549 1019 807
±20 1407 1035 15673 1185 723 2854 1755 1065 6856 970 1554 1944
FDE FDE FDE FDE
P. H. Ped. Veh. Cyc. Pe. Veh. Cyc Ped. Veh. Cyc. Ped. Veh. Cyc.
±5 168 161 502 237 220 277 169 252 271 214 501 385
±10 721 896 1124 1098 924 946 727 1163 538 778 1914 1022
±15 1517 2265 3742 2231 2230 1917 2483 2412 4452 1907 3695 3408
±20 5061 3678 38492 4100 2828 12346 6251 4040 25743 3567 5808 8539
Table 3: Path Prediction Accuracy on KITTI. BEV.
KITTI. Bird-Eye View (Meters)
Method LMDN2 VLSTM KF
ADE ADE ADE
P. H. Ped. Veh. Cyc. Ped. Veh. Cyc. Ped. Veh. Cyc.
±5 0.01 0.06 0.02 0.01 0.06 0.02 0.06 0.47 0.24
±10 0.04 0.55 0.11 0.05 0.25 0.10 0.10 0.75 0.36
±15 0.10 0.73 0.285 0.12 0.87 0.41 0.21 1.12 0.54
±20 0.31 1.31 0.805 0.22 1.68 1.01 0.41 1.79 0.90
FDE FDE FDE
P. H. Ped. Veh. Cyclist Ped. Veh. Cyc. Ped. Veh. Cyc.
±5 0.02 0.13 0.03 0.02 0.15 0.04 0.08 0.58 0.27
±10 0.13 1.24 0.29 0.14 0.72 0.27 0.25 1.67 0.64
±15 0.32 2.16 1.08 0.38 2.69 1.29 0.69 3.28 1.42
±20 1.13 4.21 2.21 0.77 5.48 3.06 1.49 6.04 2.95
Table 4: Path Prediction Accuracy on CityFlow. Image Co-
ordinates.
CityFlow. Image Coordinate (Pixels).
Method LMDN5 LMDN2 VLSTM KF
P.H. ADE ADE ADE ADE
±5 486 582 634 1369
±10 665 905 893 1948
±15 891 1094 1134 1846
±20 1613 1371 1587 2202
P.H. FDE FDE FDE FDE
±5 878 1125 1209 2492
±10 1792 2659 2525 5167
±15 3084 3817 4135 6585
±20 5749 5197 6121 8382
dicting in image coordinates, further normalisation is
needed to counter the size of the images of the dataset.
Results in pixels were provided here to be consistent
with other published results. As shown in our exper-
iments, the errors in pixels are large but that does not
mean that the predictions are far from the ground truth
paths.
Finally, the processing inference time per track-
let for our approach was 0.044ms/tr, 0.055ms/tr,
0.084ms/tr, 0.102ms/tr for P.H. of ±5 to ±20 re-
spectively. This was measured using a PC with the
following features: GPU GeForce GTX 980, CPU
Intel
R
Core
TM
i5-4690K CPU @ 3.50GHz x 4,
RAM 24GB.
7 CONCLUSIONS
We present an approach for predicting multiple paths
with associated uncertainty for forecasting possible
near future position of objects commonly present in
traffic scenes. The objective of this work was to ex-
plore the performance of the combination of LSTM
and MDN architectures and analyze the parameters
output by these models for predicting a set of paths.
The evaluation was made for three object classes, four
P.H and two different points of view.
The experiments shown that the combination of
LSTMs and MDNs does not reduce overall perfor-
mance and in some cases the accuracy was improved.
It can also be seen that including more features to the
tracklets leads to better accuracy. The results have
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
486
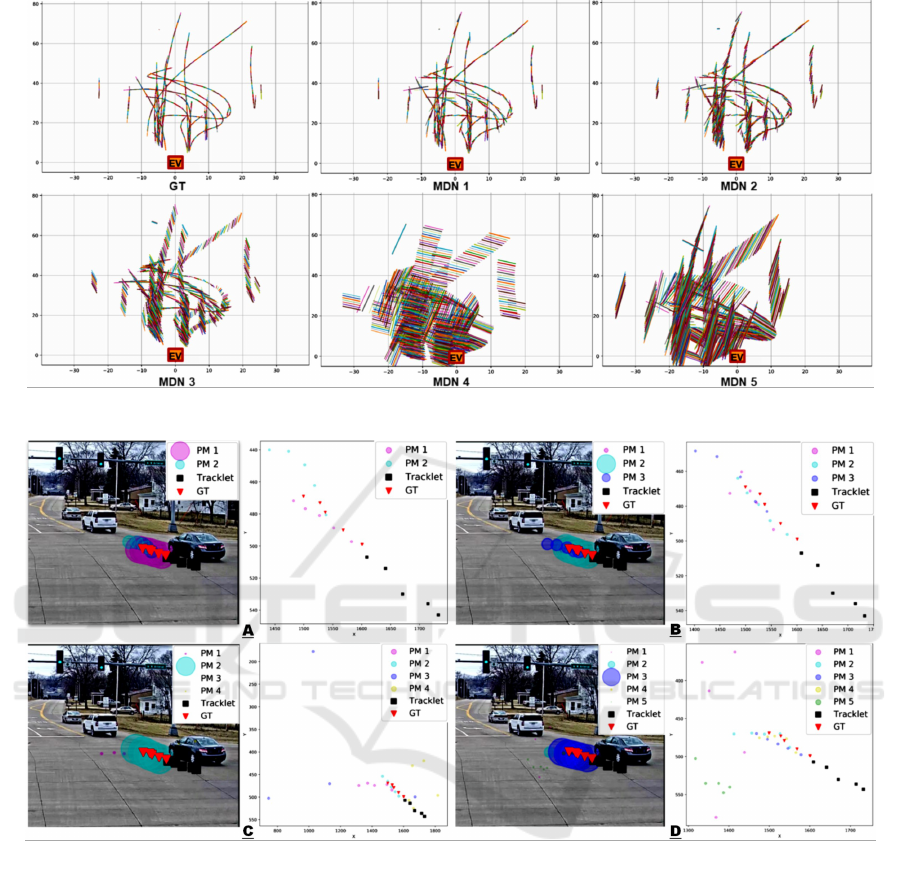
Figure 4: Set of Paths Predicted Using Five Mixtures. Dataset: KITTI. P.H.:±5. Point of View: BEV.
Figure 5: Predicting Two (a), Three (B), Four (C) and Five (D) Set of Paths. Left: Shows the Predicted Set of Paths with Their
Respective Probability (the Larger the Circle, the Larger the Probability of That Path). Right: Presents a Close-up of the Set
of Paths without Their Probabilities. Dataset: CityFlow. P.H.:±5. Point of View: Image Coordinate.
shown that the approach achieves good performance
of up to an ADE of 0.01m for pedestrians, 0.06m for
vehicles and 0.02m for cyclists and up to an FDE of
0.02m, 0.13m, 0.03m for the same objects using BEV
and P.H. of ±5. The results also show that the perfor-
mance is affected by the P.H. where longer horizons
result in a larger displacement error. The P.H. where
the approach is more reliable is for ±5 and ±10 for
image coordinate and up to ±15 for birds-eye view.
The FPS in both datasets is 10 therefore we are pre-
dicting from (± 0.5s) to (±2s) seconds ahead.
The approach was also evaluated for predicting
multiple numbers of paths per input tracklet. It was
observed that when predicting two to three paths per
input the approach works well as the predicted paths
are still related to the ground truth (GT). However,
in some cases, when predicting four and five paths,
some of the predicted paths begin to deviate further
from the GT. This cannot be seen as a disadvantage
since each path has a probability, so by looking at the
probability of each path, those paths with very low
probability can be discarded.
This work uses positional and observed paths
only, the next step will be to combine external data
to constrain the path prediction based on real world
knowledge. Semantic segmentation in traffic scenes
Multiple Path Prediction for Traffic Scenes using LSTMs and Mixture Density Models
487

is relatively reliable, so predicted path may be con-
strained by applying a semantic segmentation map
of the scenes and removing those paths that are not
adjacent to regions classified as road and sidewalk.
Specifically for the case of cameras mounted on a ve-
hicle, the next work is to include the ego-motion. Fi-
nally, to tackle the problem of representing the posi-
tion of objects on an image coordinate by pixels and
its sensitivity, it would be interesting to see the im-
age as a grid, and represent the position of the object
according to this grid.
ACKNOWLEDGEMENTS
This work has received funding from EU H2020
Project VI-DAS under grant number 690772 and
Insight Centre for Data Analytics funded by SFI,
grant number SFI/12/RC/2289. The GPU GeForce
GTX 980 used for this research was donated by the
NVIDIA Corporation.
REFERENCES
Alahi, A., Goel, K., Ramanathan, V., Robicquet, A., Fei-
Fei, L., and Savarese, S. (2016). Social LSTM: Hu-
man trajectory prediction in crowded spaces. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 961–971.
Altch
´
e, F. and de La Fortelle, A. (2017). An LSTM net-
work for highway trajectory prediction. In 2017 IEEE
20th International Conference on Intelligent Trans-
portation Systems (ITSC), pages 353–359. IEEE.
Bartoli, F., Lisanti, G., Ballan, L., and Del Bimbo, A.
(2018). Context-aware trajectory prediction. In 2018
24th International Conference on Pattern Recognition
(ICPR), pages 1941–1946. IEEE.
Bhattacharyya, A., Fritz, M., and Schiele, B. (2017).
Long-term on-board prediction of pedestrians in traf-
fic scenes. In 1st Conference on Robot Learning.
Bian, J., Tian, D., Tang, Y., and Tao, D. (2018). A sur-
vey on trajectory clustering analysis. arXiv preprint
arXiv:1802.06971.
Bishop, C. M. (1994). Mixture density networks.
Ellefsen, K. O., Martin, C. P., and Torresen, J. (2019). How
do mixture density rnns predict the future? arXiv
preprint arXiv:1901.07859.
Geiger, A., Lenz, P., Stiller, C., and Urtasun, R. (2013).
Vision meets robotics: The KITTI dataset. The Inter-
national Journal of Robotics Research, 32(11):1231–
1237.
Graves, A. (2013). Generating sequences with recurrent
neural networks. arXiv preprint arXiv:1308.0850.
Ha, D. and Eck, D. (2017). A neural representation of
sketch drawings. arXiv preprint arXiv:1704.03477.
Jin, X.-B., Su, T.-L., Kong, J.-L., Bai, Y.-T., Miao, B.-B.,
and Dou, C. (2018). State-of-the-Art mobile intelli-
gence: Enabling robots to move like humans by es-
timating mobility with artificial intelligence. Applied
Sciences, 8(3):379.
Kalman, R. E. (1960). A new approach to linear filtering
and prediction problems. Journal of basic Engineer-
ing, 82(1):35–45.
Keller, C. G. and Gavrila, D. M. (2014). Will the pedes-
trian cross? a study on pedestrian path prediction.
IEEE Transactions on Intelligent Transportation Sys-
tems, 15(2):494–506.
Kim, B., Kang, C. M., Kim, J., Lee, S. H., Chung, C. C.,
and Choi, J. W. (2017). Probabilistic vehicle trajec-
tory prediction over occupancy grid map via recurrent
neural network. In 2017 IEEE 20th International Con-
ference on Intelligent Transportation Systems (ITSC),
pages 399–404. IEEE.
Madhavan, R., Kootbally, Z., and Schlenoff, C. (2006). Pre-
diction in dynamic environments for autonomous on-
road driving. In 2006 9th International Conference on
Control, Automation, Robotics and Vision, pages 1–6.
IEEE.
Morris, B. T. and Trivedi, M. M. (2008). Learning and clas-
sification of trajectories in dynamic scenes: A gen-
eral framework for live video analysis. In Advanced
Video and Signal Based Surveillance, 2008. AVSS’08.
IEEE Fifth International Conference on, pages 154–
161. IEEE.
Okamoto, K., Berntorp, K., and Di Cairano, S. (2017).
Similarity-based vehicle-motion prediction. In 2017
American Control Conference (ACC), pages 303–308.
IEEE.
Schneider, N. and Gavrila, D. M. (2013). Pedestrian path
prediction with recursive bayesian filters: A compara-
tive study. In German Conference on Pattern Recog-
nition, pages 174–183. Springer.
Tang, Z., Naphade, M., Liu, M.-Y., Yang, X., Birchfield,
S., Wang, S., Kumar, R., Anastasiu, D., and Hwang,
J.-N. (2019). CityFlow: A city-scale benchmark
for multi-target multi-camera vehicle tracking and re-
identification. In The IEEE Conference on Computer
Vision and Pattern Recognition (CVPR).
Vasquez, D. and Fraichard, T. (2004). Motion prediction for
moving objects: a statistical approach. In Proceedings
of the IEEE International Conference on Robotics and
Automation (ICRA), volume 4, pages 3931–3936.
Yoo, Y., Yun, K., Yun, S., Hong, J., Jeong, H., and
Young Choi, J. (2016). Visual path prediction in com-
plex scenes with crowded moving objects. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition, pages 2668–2677.
Zyner, A., Worrall, S., and Nebot, E. (2019). Naturalis-
tic driver intention and path prediction using recur-
rent neural networks. IEEE Transactions on Intelli-
gent Transportation Systems.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
488
