
Bootstrapping and Plug-and-Play Operations on Software Defined
Networks: A Case Study on Self-configuration using the SONAr
Architecture
Maur
´
ıcio Amaral Gonc¸alves
a
, Natal Vieira de Souza Neto
b
, Daniel Ricardo Cunha Oliveira
c
,
Fl
´
avio de Oliveira Silva
d
and Pedro Frosi Rosa
e
Faculty of Computing, Federal University of Uberl
ˆ
andia, Uberl
ˆ
andia, Brazil
Keywords:
Self-management, Self-driving, Intent-based, Autonomic Computing, SON, SDN, NFV, Future Internet, 5G.
Abstract:
The autonomous network concept has gained strength with the growing complexity of the current networks,
especially after the definition of 5G requirements and their key performance indicators. This concept is chal-
lenging to implement in legacy networks, and it has become feasible with the emergence of network soft-
warization, which enables the deployment of functionalities through a logically centralized control plane ab-
straction. The network softwarization simplifies the management process, reduces operational costs (OPEX),
enhances protection against failures, and enables complex requirements such as high-performance indicators
and IoT support. The Self-Organizing Networks Architecture (SONAr) project uses cutting-edge technologies
and concepts such as SDN, NFV, and Machine Learning. It proposes a new architecture aimed at the design
of self-management in computer networks, oriented by declarative intents. In this work, we introduce the
SONAr project by describing its components and specifications. We also present a case study that shows the
self-configuration property that includes bootstrapping and plug-and-play operations using SONAr compo-
nents focusing on strategies applicable to OpenFlow based networks. We explain the decisions made in the
implementation and present comparative results between them.
1 INTRODUCTION
Infrastructure for future computer networks will have
great use of Software Defined Networking (SDN) and
Network Function Virtualization (NFV) (Ramirez-
Perez and Ramos, 2016), aiming to satisfy require-
ments from modern applications. The use cases
which should take the benefits of these future net-
works are 5G, Internet of Things (IoT), health appli-
cations, low latency communications, massive video
streaming, and so on (Barona L
´
opez et al., 2017).
SDN and NFV bring many advantages to computer
and telecommunications networks, mainly related to
scalability, fast deployment of new protocols, and
programmable services (Cox et al., 2017). Unfortu-
nately, these approaches also bring some new man-
agement issues to the network.
a
https://orcid.org/0000-0002-6985-638X
b
https://orcid.org/0000-0001-5047-4106
c
https://orcid.org/0000-0003-4767-5518
d
https://orcid.org/0000-0001-7051-7396
e
https://orcid.org/0000-0001-8820-9113
In traditional networks (before SDN and NFV),
the configuration was generally applied to infrastruc-
ture elements manually with low-level abstraction.
This strategy required highly complex planning to
provide communication services with many configu-
ration details per network element. At the same time,
the SDN and NFV configuration bring new challenges
related to bootstrapping and control plane availability.
In mobile networks, operated by telecommunica-
tions companies, the concept of Self-Organizing Net-
works (SON), specified by 3GPP standards (3GPP,
2018b)(3GPP, 2018a)(3GPP, 2018a)(3GPP, 2018b)
defines the use of SON for network automation. The
idea of autonomic computing was also used in soft-
ware engineering and defined by IBM (Ganek and
Corbi, 2003a).
However, SON functionalities used by mobile net-
works focuses only on the Radio Access Network
(RAN). The core of the network has neither standards
nor complete architectures to handle such self-* prop-
erties. The self-* refers to a set of properties such
as self-healing, self-configuration, self-optimization,
self-protection, and so on (Boutaba and Aib, 2007).
Gonçalves, M., Neto, N., Oliveira, D., Silva, F. and Rosa, P.
Bootstrapping and Plug-and-Play Operations on Software Defined Networks: A Case Study on Self-configuration using the SONAr Architecture.
DOI: 10.5220/0009406901030114
In Proceedings of the 10th International Conference on Cloud Computing and Services Science (CLOSER 2020), pages 103-114
ISBN: 978-989-758-424-4
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
103

The first step in developing an architecture for net-
work self-management is to understand the require-
ments of administrators and operators. This under-
standing is useful both for the design of the solu-
tion and for gaining the trust of administrators, who
fear the loss of control and dependence on tools in
the administrative process (Duez et al., 2006). In-
appropriate automation can increase the complexity
of management, what is known as “irony of automa-
tion” (Bainbridge, 1983), or even propagate errors on
a larger scale than with manual intervention. On the
other hand, it will be impossible to manually man-
age the complexity of future networks. Because of
this, autonomic computing should be explored to self-
manage the environments (Sanchez et al., 2014).
In this work, we introduce the Self-Organizing
Networks Architecture (SONAr), presenting its com-
plete specification. SONAr’s design principle is
to have a vendor-independent solution, i.e., a self-
management product that can be deployed in any en-
vironment. Data centers, home networks, telecom-
munications core networks, enterprise networks, and
others can take advantage of using SONAr to apply
self-management in their infrastructure. SONAr aims
to use self-* properties to handle and manage infras-
tructure, hardware and software, and network com-
munication in general.
We also present a case study that explains the
self-configuration property that includes bootstrap-
ping and plug-and-play operations. This experimen-
tal evaluation of the self-configuration SONAr com-
ponents focuses on strategies applicable to OpenFlow
based networks. We explain the decisions made in
the implementation and present comparative results
between them.
The paper is structured as follows. Section 2
presents the background and related work. Section
3 shows the requirements and challenges of man-
agement in future networks. Section 4 presents the
SONAr solution with an overview of its main com-
ponents. Section 5 shows the results from our exper-
iments regarding self-configuration, and finally, Sec-
tion 6 presents concluding remarks and future work.
2 BACKGROUND
The concept of Self-Organizing Networks(3GPP,
2018) has been explored by telecommunication net-
works standards (3GPP, 2018b)(3GPP, 2018a)(3GPP,
2018b)(3GPP, 2018a) as a way of dealing with the
growing complexity of the infrastructure and the need
for coexistence with legacy technologies (Feng and
Seidel, 2008). In the same way, autonomous com-
puting concept (Ganek and Corbi, 2003b) proposes
the automation of administrative and operational pro-
cesses as a way to reduce the complexity of com-
puting systems, minimize operational costs (OPEX)
and improve Quality of Service (QoS). The term is an
analogy to the autonomous nervous system, which is
the mechanism responsible for important bodily func-
tions (e.g., breathing and blood supply) without con-
scious intervention. Similarly, we believe that net-
works must be able to self-manage with minimal hu-
man intervention.
In this section we show how SDN (McKeown
et al., 2008) and NFV (Cui et al., 2012) could be
used together to apply SON and autonomic comput-
ing in the core network of future networks. At the end,
we present some related works, which have explored
some points, and correlate them with SONAr.
2.1 SDN and NFV
Since SDN has programmable and centralized con-
trol, the configuration operations would be simplified.
The SDN provides a high-level abstraction which al-
lows the services deployment as a combination of
flows and functions.
NFV is usually presented together with SDN as
a way to make provisioning for network functions
more flexible. By considering this approach, the
SDN controller is usually deployed as a virtual func-
tion. Besides that, other Virtual Network Func-
tions (VNF), such as routers, gateways, firewalls etc,
need to work without interruptions. It means that
the SDN and NFV need to guarantee that the VNFs
are movable in the available infrastructure, keeping
routes and other network configurations (Cox et al.,
2017)(Barona L
´
opez et al., 2017).
Some tools and frameworks for management are
available in SDN. OF-Config is a protocol based on
NETCONF, designed for SDN management. The
protocol is restricted to OpenFlow. AdVisor is an-
other example, which provides a management inter-
face. These tools help the operation and implementa-
tion of management requirements, such as bootstrap,
isolation, planning, monitoring etc (Wickboldt et al.,
2015).
In future networks, the management keeps some
challenges such as provide transparent mobility, low
latency communication, minimal cost, and support-
ing millions of new devices.These problems need to
be solved or mitigated using advanced techniques,
like autonomic computing and self-management
(Barona L
´
opez et al., 2017).
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
104

2.2 Related Work
SELFNET project (Neves et al., 2016) presents an
architecture for orchestration, administration and ac-
cess control in SDN and NFV environments. It in-
tegrates SDN, SON, NFV, cloud computing and Ar-
tificial Intelligence (AI) to create an autonomic net-
work management. Some sensors and actuators are
deployed in the control plane and data plane, with
the mission to execute the autonomic computing ac-
tions (monitoring, optimizing, recovery etc). SELF-
NET is a promising work in progress, designed for
5G networks. SONAr and SELFNET have some mu-
tual functions and could work together in the future,
since SONAr is designed to be independent of the net-
work type (5G, core network, home networks etc can
use the benefits of the solution).
In (d. R. Fonseca and Mota, 2017) the authors ex-
plore fault management in SDN. This paper shows
the benefits provided by SDN, and describes the new
failure points which were created with the SDN ap-
proach. It is important to know the different possible
failures: in the data plane, in the controllers, or in the
SDN applications.
In (Abdallah et al., 2018) the authors present
a framework for FCAPS (Fault, Configuration, Ac-
counting, Performance, Security) model. The paper
shows the functions that can be assigned by the con-
troller, and those that should be assigned by the Man-
agement Plane. It also shows a brief description of the
use of OF-Config, instead of OpenFlow, for manage-
ment needs.
As described in this section, many groups around
the world have applied self-management through
SDN and NFV. There is no project completed in this
scenario (i.e. self-management in network core). Ad-
ministrators and network operators have many re-
quirements not met by the proposed frameworks.
3 SELF-MANAGEMENT
REQUIREMENTS FOR FUTURE
NETWORKS
This section introduces the main application require-
ments into future network environments, as well as
the requirements of network operators, that is, re-
quirements related to network management.
3.1 Future Internet Applications and
QoS Requirements
The Future Internet is being developed as a response
to the strict requirements and complexity of new ap-
plications – some of which are already being explored
in a limited scope. Some good examples are VR/AR
applications, drone control (together with 4K video
transmission), tactile Internet, in-cloud gaming, au-
tonomous driving, among others. All of these cases
have a certain degree of high bandwidth and through-
put as a common requirement, and low latency re-
sponse is crucial to their successful implementation,
especially when considering real-time interaction. In
these particular cases, the senses of participating hu-
mans must be taken into account. For example, audi-
tory interactions require a response time of 100 ms,
while the visual reaction requires about 10 ms and
tactile feedback, round trip delay time less than 1 ms
(Simsek et al., 2016).
For a VR/AR total immersive experience indistin-
guishable from the reality, a network throughput of
5.2 Gb/s would be required for each user, albeit in a
more realistic approach for practical applications, a
throughput of 100-200 Mb/s with a latency of 13 ms
give most people a good immersive experience with-
out a feeling of motion sickness (Bastug et al., 2017).
Another important issue is the network reliability.
Some 5G typical applications demands less than 10
−7
failure rate, which corresponds to 3.16 seconds of un-
availability per year (Simsek et al., 2016).
In general, the main requirements for a new gen-
eration network – e.g. high flexibility, plasticity, eas-
iness of (re)configuration, implementation and con-
trol, reliability and cost-effectiveness – are not reach-
able using the legacy or current working network pro-
tocols.
3.2 Main Requirements of Real
Operators and Telecommunications
Industry
Implementing a self-managed SDN network is not
an easy task. From the network operator’s point of
view, several challenges remain, if aspects such as
backward compatibility, choice of deployment strat-
egy, security issues, and especially business cases are
closely observed (Zaidi et al., 2018). However, when
considering the benefits of a Self-Organizing Network
in the Future Internet scenario and the limitations al-
ready discussed, it is very clear that a SDN approach
combined with SON architecture is a smart and viable
solution. The main requirements presented by net-
Bootstrapping and Plug-and-Play Operations on Software Defined Networks: A Case Study on Self-configuration using the SONAr
Architecture
105

work operators are: self-configuration, self-healing,
self-optimization and self-protecting. Without these
requisites, it will be difficult - if not impossible - to
successfully deploy the Future Internet applications
in a commercial network:
• Self-configuration: Setting up network elements
usually means a lot of work, done by skilled en-
gineers with a deep understanding of the oper-
ator’s network, every time a new Network Ele-
ment (NE) is put into service or moved from one
place to another. It is not difficult to predict the
amount of work that will be needed only to con-
figure the radio access network – including front,
mid and backhaul – of a complex and high den-
sity 5G macro/small/pico cells network of a city
such as Beijing or S
˜
ao Paulo. The Future Internet
will require plug-and-play solutions not only for
the deployment of a complex system, but also to
make its plasticity feasible;
• Self-healing: Ultra-high reliability will be a key
issue in the Future Networks. Nowadays, the fault
recovery management and recovery rely on the
traditional distributed protocols – such as EIGRP
or OSPF – to handle failures, which can not pro-
vide the required 99.999% reliability and may
lead to some important issues (d. R. Fonseca
and Mota, 2017). A quick response to faults
is an indispensable aspect to be observed in a
new network architecture, and self-healing is an
important feature to be considered in any Self-
Organizing Networks architecture proposal and
an indisputable requirement for the telecommuni-
cations industry;
• Self-optimization: self-optimization process is a
response to the increasing complexity of today’s
networks. As they become bigger, interconnected,
multi-vendor and, thus, more and more complex,
the work to achieve efficiency also becomes more
difficult bordering on the impractical. Until a
few years ago, self-optimization tools were re-
stricted – and even full-blown – to mobile radio
access networks (RAN). The concept was first
introduced in 3GPP Rel. 8 (Moysen and Giup-
poni, 2018), as an answer to the huge amount
of network parameters that had to be managed
by the RAN optimization engineers. With SON
being introduced in the access and transport net-
works, it is a natural path that self-optimization
process should be also part of the evolution, as it
will increase the system efficiency, thus reducing
CAPEX/OPEX on nodes and links;
• Self-protection: Intrinsic self-protecting systems
are also an important feature in any SON archi-
tecture. The main types of threats are: DDoS at-
tacks, user to root (U2R) attacks, remote to local
(R2L) attacks and probe attacks, and a number of
router-based defense mechanisms have been pro-
posed to detect and prevent them (Hariri et al.,
2005). Needless to affirm that an inherent, fast-
converging and intelligent self-protection system
will be indispensable for future networks man-
agement and a great demand from the operators
point-of-view.
The background and the requirements for future
networks already presented give the basement for
SONAr. Section 4 brings the new architecture design,
the main components specification (and their integra-
tion), and the layer placement of the solution.
4 SONAr DESIGN AND
SPECIFICATION
Figure 1 presents the SONAr design, its components
and their distribution by network layers. The main
modules are described in this section.
4.1 Self-Organizing Entities
The Self-Organizing Entities (SOEs) are responsible
to perform the basic algorithms related with the au-
tonomic computing fundamentals. The intelligence
to heal, optimize, configure, protect, and plan is per-
formed by these entities. Usually, the Network Event
Manager (NEM) receives events from all components
of the architecture. The Self-Organizing Entities sub-
scribe to specific topics on NEM, and then receive the
events related with self-* properties.
Self-Healing Entity (SHE) performs algorithms to
predict or detect faults in all of the components de-
picted in Figure 1. In case of failures, it is necessary to
recover from them. Note that faults in the Infrastruc-
ture Layer within SDN elements (such as OpenFlow
switches) are usually handled by the SDN controller.
Unfortunately, some legacy devices are not covered
by controllers, and need special attention. In addi-
tion to the infrastructure, SHE needs to detect fail-
ures in the Control Layer, such as bugs or crashes
in controllers, Virtual Infrastructure Manager (VIM),
VNF managers etc. SONAr components may also
fail, and SHE must have recovery functions. Further-
more, SHE itself may fail and need to recover itself as
soon as possible.
The Self-Configuration Entity (SCE) works at the
time of the network bootstrap and the NE plugging. In
bootstrapping, the SCE configures all flows within the
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
106
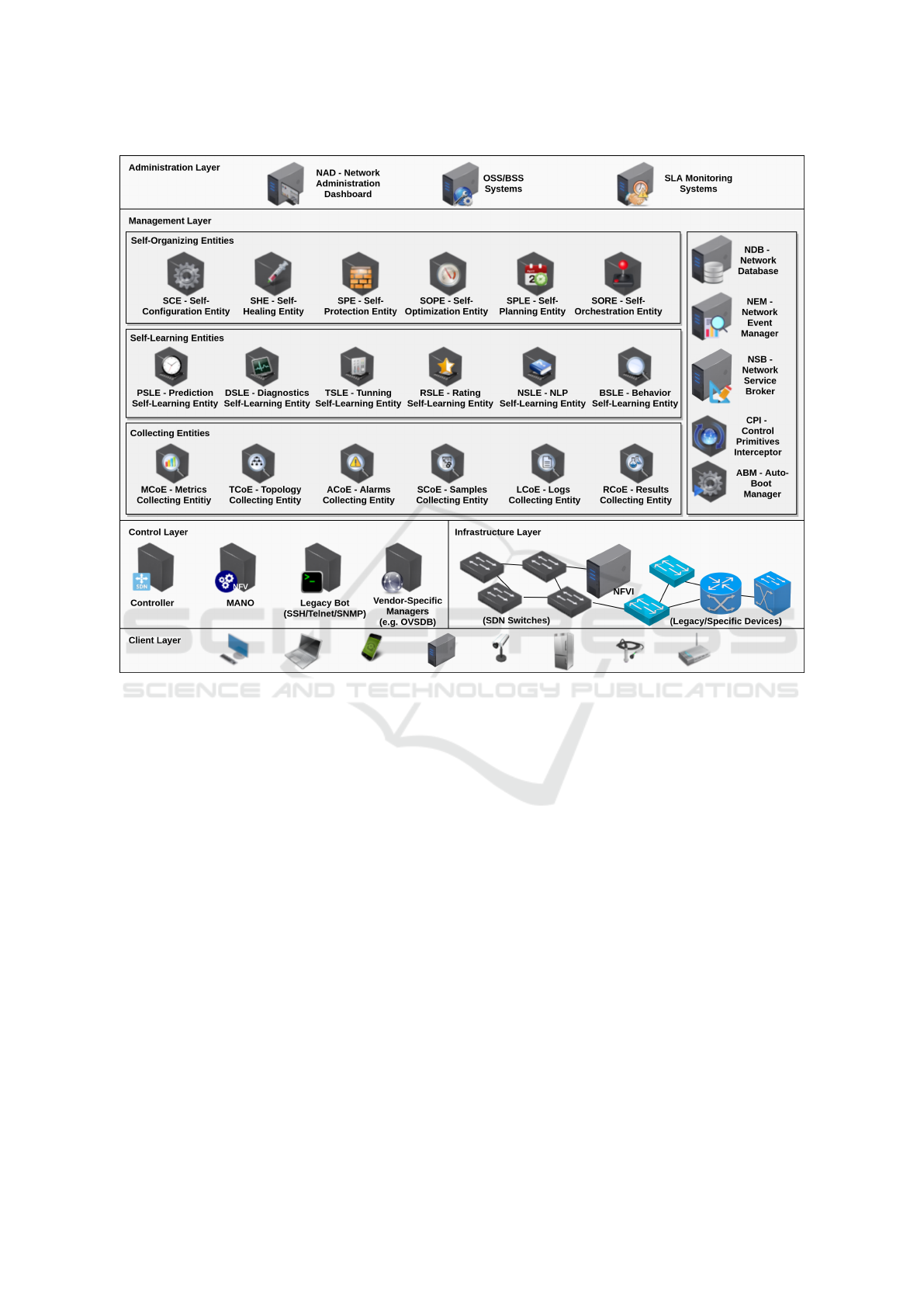
Figure 1: SONAr Design.
NE to move the network from an out-of-service state
to a running state. When the network is running, the
SCE works at the moment a new NE is plugged in the
environment. In current infrastructures, an operator
physically connects the new NE and configures the
NE and its neighbors, e.g., the address (usually IP),
host name, and routes are manually configured. The
purpose of the SCE is to be responsible for discover-
ing these settings and executing them automatically.
SCE is also responsible for the safety of new com-
ponents. In traditional architectures, when a new
equipment is connected to the network by an operator,
it is discovered by the topology and begins to func-
tion. Routing protocols, such as OSPF, start creating
routes for this new equipment. Security may become
a problem in this scenario if this new equipment is not
valid or authorized. With SONAr, the SCE needs to
guarantee the identity of new components.
The Self-Optimization Entity (SOPE) subscribes
statistical topics and analyzes possible network im-
provements. Considering a SDN and NFV environ-
ment, the improvements are usually related to real-
location of resources. In the Infrastructure Layer, if
the SDN is an OpenFlow implementation, SOPE can
rearrange the flow rules within the OpenFlow switch
to use the resources intelligently. Network slice man-
agement is also covered by SOPE. Note that SOPE
collaborates with the Diagnostics Self-Learning En-
tity (DSLE). Almost all improvements are made after
the analysis of the history. Differentiation between
DSLE and SOPE functions is important: DSLE per-
forms AI algorithms while SOPE receives DSLE out-
comes and performs algorithms to improve the use of
network resources and infrastructure.
A common example of improvement is to avoid
congestion: if the DSLE identifies that an NE or a port
will be congested in the future, it will notify SOPE to
perform an optimization procedure. SOPE will then
analyze the event sent by DSLE and rebalance flows
between routes.
The Self-Protection Entity (SPE) ensures the pro-
tection of all layers in Figure 1 against attacks. SPE
has the services prepared for isolation and recovery.
The first step is to isolate the compromised compo-
Bootstrapping and Plug-and-Play Operations on Software Defined Networks: A Case Study on Self-configuration using the SONAr
Architecture
107

nents, preventing attacks from reaching other compo-
nents. After isolation, the SPE will recover the at-
tacked component, clearing the remains of the attack,
and then reinserting the clean component into the in-
frastructure. Like SOPE, SPE is also based on diag-
noses made by DSLE.
Architectures and frameworks in academy and in-
dustry have created mechanisms to protect the Infras-
tructure Layer. The current challenge is to ensure
the protection of all layers shown in Figure 1. The
Control Layer has components that can be attacked,
such as the SDN controller: once it has control of any
network topology, a successful attack on this compo-
nent gives the attacker control of all infrastructure. In
addition, the SPE needs to isolate attacks on the In-
frastructure Layer, that is, attacks on an NE must be
restricted to that NE and can not reach the Control
Layer. Attacks on the Self-Management Layer and
Administration Layer follow the same analogy.
The Self-Planning Entity (SPLE) works in con-
junction with all Self-Organizing Entities and aims to
schedule actions of other entities. The main idea is to
realize changes that will be made in the future and to
schedule them to be made in a timely manner. An-
other basic function is to ensure that repetitive actions
of SHE, SCE, SPE and SOPE are applied.
SHE, SCE, SPE, SOPE and SPLE are separate en-
tities that perform services that can interact. These
interactions can eventually cause inconsistencies. For
instance the optimization: SOPE could determine an
improvement in the network and to make this im-
provement, a route would need to change from one
port to another in a given NE. It may be that the SPE
blocked this target port in advance to prevent an at-
tack. SOPE’s decision may eventually replace the
previous decision of the SPE. The Self-Orchestration
Entity (SORE) was designed to control the actions
created by other Self-Organizing Entities.
The SORE will receive all the actions of other en-
tities and will organize them in a queue, prioritizing
the actions. The operator could previously determine
the priorities in the SONAr dashboard. To avoid in-
consistencies, SORE works with the concept of trans-
action: if a flow rule in an NE is initiated, other flow
rules in the same register are queued. After the first
flow rule is completed, the SORE will execute the oth-
ers. Rollbacks are also performed by the SORE.
4.2 Self-Learning Entities
The Self-Learning Entities (SLEs) are responsible
for providing AI based mechanisms to overcome the
absence of human intervention. These entities use
knowledge bases that can be built dynamically in an
action/consequence analysis, manually in a guided
learning strategy or imported from third parties simi-
larly to antivirus bases (which allows the easy set-up
for new networks). SLE implements machine learn-
ing algorithms to provide scenario prediction, param-
eter adjustment, problem/opportunity diagnosis, be-
havioral pattern detection, infrastructure classification
and translation of intentions. These activities are usu-
ally complex and slow, and therefore need to be ad-
dressed by specific mechanisms separated from Self-
Organizing Entities.
The Prediction Self-Learning Entity (PSLE) ap-
plies the K-Nearest Neighbors (KNN) algorithm to
classify metrics, services, time and topology to pro-
vide a discrete representation of the scenario.
The Tuning Self-Learning Entity (TSLE) provides
hyper-parameter optimization for all SONAr compo-
nents, including those composing SLE. For this, it
monitors the quality of the scenarios, evaluation met-
rics and service levels through a classification algo-
rithm such as the KNN.
The Diagnostic Self-Learning Entity (DSLE) im-
plements a correlation algorithm for root cause anal-
ysis, service level assurance, security issues detection
and network degradation diagnostics. This is done
by analyzing the metrics and thresholds, verifying the
occurrence of alarms and monitoring log patterns and
events. The knowledge base for DSLE can be con-
structed with administrator-driven learning or deep-
learning based on data patterns of previous correct di-
agnostics. This entity creates events in the NEM with
the specific diagnosis and all data available.
The Rating Self-Learning Entity (RSLE) evalu-
ates devices, links, services, components and algo-
rithms based on their performance, costs, usage statis-
tics, current occupation, capabilities, and service level
history for each of the supported policies. With a ma-
ture knowledge base, RSLE can be used to define the
best infrastructure elements to be used at a specific
time to configure a service according to its policies.
The NLP Self-Learning Entity (NSLE) imple-
ments the Intent Translator through Natural Language
Processing (NLP) and Neural Networks. NSLE can
infer policies, functions and filters from a service
based on Declarative Intents expressed in natural lan-
guage. The knowledge base for translating intentions
can be constructed from guided learning or service
description analysis (which is basically an intention
defined in a formally-described service). NSLE also
implements the feedback delivery aspect of the ser-
vice validator, which is done by analyzing metrics
such as RSLE and DSLE.
The Behavior Pattern Self-Learning Entity
(BSLE) is responsible for detecting network usage
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
108

patterns and identifying the types of content being
transmitted. This is an important feature for self-
management since it makes the network sensitive to
changes in context and allows activation of services
under specific conditions.
4.3 Collecting Entities
The Collecting Entities (CoEs) are responsible for
collecting data from the infrastructure and all other
components of the architecture. This data is useful
for monitoring the state of the network and providing
the guarantee of the level of service.
These entities are also responsible for trigger-
ing events when: new data becomes available, data
changes, limits are reached and reportable patterns
are detected. Basic events can be used by SLEs and
Self-Organizing Entities, which can use raw data as
well as analyze and make decisions. The implemen-
tation of each CoE varies according to the specificity
of the infrastructure, which can occur through pro-
prietary protocols such as OVSDB and CDP, spe-
cific management systems, control components such
as the MANO and SDN controller, CLI robots using
ssh/telnet, or open protocols such as SNMP, LLDP,
and syslog.
Each Collecting Entity implements a specific al-
gorithm to collect and process the related data type.
The Metrics Collecting Entity (MCoE) collects met-
rics from devices, links and servers through specific
protocols, monitor thresholds and trigger events. The
Topology Collecting Entity (TCoE) applies discovery
algorithms, monitor changes on topology and trigger
specific events when it occurs. The Alarms Collect-
ing Entity (ACoE) collects events with an active or
reactive strategy, for example by using SNMP traps
or data polling, and triggers more specific events such
as those defined by the DSLE. The Samples Collect-
ing Entity (SCoE) uses strategies like Deep Packet
Inspection (DPI), port mirroring and network sniff-
ing to infer content types from a particular instance
of communication, which can be used to enable spe-
cific services and to detect usage anomalies or secu-
rity issues. The Results Collection Entity (RCoE) is
responsible for conducting periodic examinations of
resources and components in order to collect specific
data that cannot be obtained otherwise, such as la-
tency and availability. Finally, the Logs Collecting
Entity (LCoE) collects logs and looks for predefined
patterns (specified by administrators or imported from
an existing knowledge base) and fires events when
they match.
CoE plays a vital role for self-management and
can be used in any solution. At the same time, it is
possible to use current collector applications, such as
those implemented in SDN controllers, with a polling
and processing strategy to power the SONAr compo-
nents.
4.4 Network Event Manager
The Network Event Manager (NEM) is a pub-
lisher/subscriber provider, able to handle events cat-
egorized into topics. Event processing can occur syn-
chronously or asynchronously, the second being pro-
vided by a message queue solution. All SONAr com-
ponents trigger events, even for notification when per-
forming actions. Typically, SLEs and SORE are sub-
scribed into topics, but SONAr defines a flexible ar-
chitecture where any Self-Organizing Entities can en-
roll on a specific topic directly and take advantage of
it. NEM also manages the event relationships gener-
ated by DSLE correlation to avoid unnecessary pro-
cessing and optimize management.
SONAr is a completely event-oriented architec-
ture, so NEM has an important role in connecting all
the other components. The asynchronicity provided
by NEM is essential for the self-management of the
network, considering the Key Performance Indicators
(KPIs) of future networks.
4.5 Network Database
The Network Database (NDB) stores all SONAr in-
formation: metrics, topology data, alarms, samples
and logs collected by CoE; administrative data used
by the dashboard; management primitives intercepted
by CPI; events sent to the NEM; events created by any
entity (SHE, SPE, SOPE, SCE etc); and prediction
and analysis information (including input parameters
and results).
Events sent to the NEM are first used by the Self-
Organizing Entities, and stored in the NDB because
they will be used by the SLE Machine Learning al-
gorithms. From these events, the SLE can analyze
information and adjust models to predict network be-
havior. The SLE analyzes data and creates new data
(results), which are also stored in the NDB. The his-
tory of events received and created by the architecture
entities are also maintained in the NDB. The SONAr
dashboard can query this history and operators have
graphical view of the behavior of the network over
time.
The Self-Organizing Entities perform actions in
the topology, and these actions are also stored in
NDB. They can be used in the future to determine if
a specific action solves a problem or not. SLE could
also take advantage of this information. An example
Bootstrapping and Plug-and-Play Operations on Software Defined Networks: A Case Study on Self-configuration using the SONAr
Architecture
109

is SHE: sometimes more than one action may be re-
quired to recover from a failure. The SHE performs
the action (through the SORE) and, if the action does
not solve the problem, the next action is chosen. The
results of these actions are stored in the NDB, and
in the future the SORE queries the NDB and decides
which action, in this specific situation, has the highest
success rate.
The NDB is designed to be distributed to ensure
high availability and scalability. Implementation de-
tails are beyond the scope of this work, but it is rec-
ommended that NDB be implemented using well-
known NoSQL databases such as Cassandra, Mon-
goDB, ElasticSearch, etc. (for high availability pur-
poses).
4.6 Controller Interceptor
The Control Primitives Interceptor (CPI) is a crucial
component of SONAr. It is intended to be placed in
the Southbound Interface (SBI), working as a proxy
between the data plane and the SDN controller. The
control primitives that cross this interface are captured
and analyzed by the interceptor. If a primitive has
management semantics, it is sent to the SONAr com-
ponents and SDN controller. Otherwise, it is sent only
to the SDN controller.
The control primitives that travel in SBI are usu-
ally related to applications and hosts connected in the
topology, but some of them are related to primitives
of metrics and notifications. First, the CPI receives
a primitive and determines if this primitive has man-
agement semantics. After that, it parses the primitive
by performing a shaping and discard analysis. The
shaping will create a new primitive used by SONAr
components. The discard will drop malicious prim-
itives that were sent to the SDN controller by an at-
tacker. The new shaped primitive will be sent to Net-
work Event Manager (NEM), as an event. Then, other
SONAr components will catch the event and treat it.
4.7 Other Elements
The Network Administration Dashboard (NAD) is
an administrative tool for interacting with Self-
Management Layer, allowing: to visualize topology,
metrics, alarms, logs and events; to manage services;
to enable guided learning and manual diagnostics; to
provide service level and network status monitoring;
and to allow the definition of parameters and goals.
Auto-Boot Manager is a solution for starting the
network. It is responsible for: allocating resources;
instantiating VNFs; deployment of applications; con-
figuring devices and servers; and establishment of
control and management flows. It follows an imple-
mentation plan that lists infrastructure details and a
specification of required components and where they
should be deployed, or can be fully automated by a
strategy of self-discovery and self-configuration.
Even following a deployment plan, the Auto-
Boot Manager constantly monitors the infrastruc-
ture to detect new devices and changes in general,
and allows the Self-Organizing Entities to apply set-
tings as needed. It combines a DHCP server, a
FTP server containing configuration scripts, an Auto-
Attach Manager as defined by the IETF for SPBM,
and an OVSDB Manager. It controls the assignment
of identification (usually IP) for devices; queries basic
information (using the CoE code); applies the SPBM
strategy to establish control and management flows;
pushes configurations for devices and servers; and de-
ploys and initiates component control and manage-
ment. The Auto-Boot Manager is also directly re-
sponsible for auto-attaching of devices, servers, and
links in a plug-and-play strategy. To do this, it con-
stantly changes the basic configuration of flows and
deployment (in active mode) or allows the reconfigu-
ration called by the SCE (in reactive mode).
The Network Service Broker (NSB) is used by
customers and administrators to configure communi-
cation services based on intentions inferred from the
behavior/content or described in natural/formal lan-
guage. These services are configured by SCE and
guaranteed by other SOEs.
5 EXPERIMENTS
A prototype was developed to evaluate the SONAr
architecture, implementing its main components to
test its ability to initialize a software-defined net-
work. This prototype involves: the Auto-Boot Man-
ager, which is responsible for starting and configur-
ing all infrastructure components; the Topology Col-
lecting Entity, which is responsible for running the
discovery process and for triggering events; the Self-
Configuration Entity, responsible for calculating the
routes, enabling OpenFlow and configuring the con-
troller in the devices, and pushing the flow configura-
tion through the controller; the Network Event Man-
ager, which is responsible for managing the events ex-
changed by SCE and TCoE; the Network Database,
responsible for storing the data, and the SDN con-
troller used to control the devices.
To facilitate the deployment of the components,
they were implemented as microservices running on
Docker containers. Integration between components
is done by event and database sharing. We also im-
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
110

plemented our own Container Infrastructure Manager
(SONAR-CIM), which provides a RESTful API for
managing containers with Docker support through the
Spotify Docker Client API 8.16.1. In addition, we
have implemented a custom DHCP server to pro-
vide dynamic IP address assignment . Our DHCP
server supports the standard method (listening for
broadcast UDP datagrams on port 67) and the Open-
Flow method (processing PACKET-IN and returning
PACKET-OUT).
All components were implemented using JAVA 8
and Spring Boot 2.1.2. We have also used RabbitMQ
3.8.0 for implementing the NEM, Apache Cassandra
3.11.4 for NDB, and ONOS 2.1.0 for SDN controller.
We have built a Docker image of NE using Linux
Alpine 3.9, net-snmp 5.7.3, lldpd 1.0.3 (with SNMP
support) and Open vSwitch 2.10.1. The boot script of
our NE starts the snmpd, lldpd and ovs-vswitchd; cre-
ates the OVSDB database and listens to remote and
local connections; creates a bridge interface and runs
the DHCP client. The SONAr server is a VirtualBox
6.0 VM with Ubuntu Server 16.04, 8194MB of RAM,
22GB of HD and a processor with 8 cores operating at
2.00GHz. In SONAr Server we installed JDK 1.8.0-
151 and also net-snmp 5.7.3 and lldpd 1.0.3 (with
SNMP support). The experiments were simulated us-
ing GNS3 2.1.16 (Neumann, 2014) in a machine with
Ubuntu 18.10, 16 GB of RAM, 40 GB of HD and a
processor with 8 cores operating at 2.00GHz.
The experiments were based on comparative tests
with topologies of different proportions. To make this
possible, we created topologies with 1, 2, 4, 8, 16, 32,
64, and 128 switches in GNS3 to simulate the scenar-
ios described in the next sections.
5.1 Network Bootstrapping Scenario
When SONAr is started, it enters in the Discovery
Stage (initiated by TCoE) in which it tries to dis-
cover all connected devices using BFS search and
multi-threaded processing. In this process, NEs
have already been started and operate as conventional
switches (with learning switch mechanism). When all
NEs are discovered with SNMP without failures or a
timeout is reached, TCoE notifies the change of state
through NEM.
Upon receiving the event that indicates the end
of the Discovery Stage, the SCE starts the Routing
Stage, when the configuration is calculated in a multi-
objective analysis. In this experiment, we simplified
this process using the Dijkstra algorithm to calculate
the shortest paths between the server and the NEs. In
this step, we also calculate a dependency tree, where
the subsequent node depends on the configuration of
the previous node. This is required to maintain con-
nectivity to devices throughout the process. Configu-
ration is also calculated at this stage, including flows
to process ARP, DHCP, and routes between switches.
Finally, after the routing stage, the SCE starts the
last stage, called the Configuration Stage. In this
step, the SCE connects the grouped NEs according to
the previously calculated dependencies using a multi-
threading strategy, and configures the bridge, proto-
cols, and controllers. The SCE waits for the effective
connection of the network element before continuing.
When the NE is connected to the Controller (option-
ally using a CPI), the SCE sends the flow configura-
tion to the Controller as a configuration block. Upon
all devices have been configured, this stage ends and
SONAr changes the state of the network to “started”.
5.2 Device Plug-and-Play Scenario
When a new NE is connected to the network, such
as an OpenFlow switch, it usually initiates a self-
configuration process in which an address is requested
through the DHCP protocol (Device Boot stage).
SONAr implements a DHCP server capable of pro-
viding unique addresses and notifying management
components such as TCoE, which starts the initial dis-
covery process to find the attachment point of the new
element (Discovery Stage - pt.1). After that, an ac-
cess route can be calculated and deployed in order to
provide connectivity between the SONAr components
and the new device (Route Calculation and Deploy-
ment Stages). Once the access routes are deployed,
the TCoE becomes able to perform the discovery rou-
tine with the plugged device (Discovery Stage - pt.2)
and, in the end, notify the other components about the
new available device.
Upon receiving the event that indicates a new
available device, SCE starts the configuration process
(Configuration Stage) in which the device is config-
ured to use a specific controller (or CPI) and a default
configuration is deployed according to the adminis-
trative goals defined as policies.
5.3 Results
Experiments were performed comparing the SONAr
performance in topologies with different proportions.
We tested the time spent by SONAr to initialize and
extend networks with 1, 2, 4, 8, 16, 32, 64 and 128
devices. In each sub-experiment at least eight tests
were performed (one for each network), and results
with errors or abnormal delays were discarded.
In each test the configuration of the switches was
reset and the components were removed from the
Bootstrapping and Plug-and-Play Operations on Software Defined Networks: A Case Study on Self-configuration using the SONAr
Architecture
111
server in order to test boot on networks from scratch.
As can be seen in Figure 3, we tested three dif-
ferent network bootstrapping strategies: boot 1 – con-
necting devices directly to controllers (without CPI)
and configuring devices starting from the servers to
the most distant nodes (from roots to leaves); boot2
– connecting devices via CPI to controllers and con-
figuring devices starting from servers to the most dis-
tant nodes (from roots to leaves); and, boot 3 – con-
necting devices via CPI to controllers and configur-
ing devices starting from the most distant nodes to the
servers (from leaves to roots). The division of this ex-
periment in three aims to identify the overhead result-
ing from the use of CPI and the differences between
the configuration orders, which is due to the fact that
when configuring a particular switch it is necessary to
wait for the deployment of all flows before to proceed
configuring the next accessible switches. This occurs
because when configuring the OpenFlow protocol on
the switch bridge the default learning-switch behav-
ior is disabled preventing neighboring devices from
being accessed without specific flows being created.
By starting from the “leaves” all switches can be ac-
cessed by default learning-switch behavior.
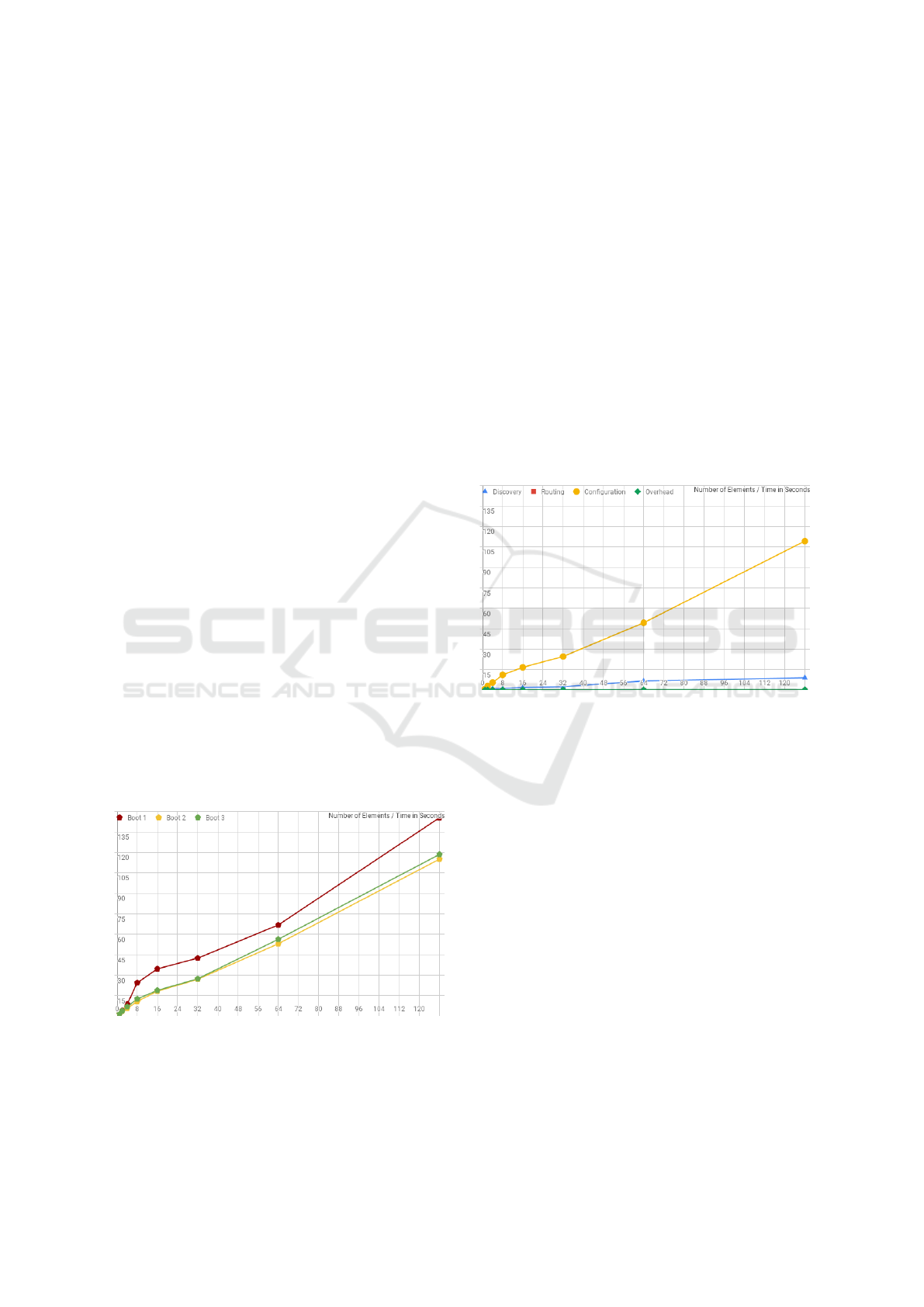
Figure 2 demonstrates that the total bootstrapping
time in all experiments increases linearly according to
the number of devices. It also shows that the overhead
introduced for using the CPI component is minimal
and does not change the linear behavior of bootstrap-
ping, which can be observed when comparing the
times between boot 2 and boot 3 strategies. The re-
sults also show that when comparing boot 1 and boot
2 strategies in networks with more than 4 devices po-
sitioned at a maximum distance of 3 hops, the order
of configuration from leaves to roots presents a reduc-
tion of between 20 and 40 % of total time.
Figure 2: Time Comparison between the Three Bootstrap-
ping Strategies Tested.
Figure 3 presents the time spent in each stage of
bootstrapping using the strategy boot 3. As can be
observed, the time of all stages increases linearly ac-
cording to the number of devices. The routing time
is almost insignificant compared to the time of other
stages, and this is certainly related to the simplifica-
tion of the multi-objective analysis as a shortest-path
problem and by the absence of any integration with
the external system. The Figure 3 also shows that the
growth of the discovery time through the scenarios
tends to be lighter, and this is explained due to the
multi-threaded breadth-first search strategy and the
topology design of the scenario. Every time a device
is discovered, more devices become eligible for dis-
covery, and this causes an acceleration of the process.
The growth of configuration time is more uniform and
tends to increase linearly at almost the same rate as
the number of devices. The Overhead time is basi-
cally the time difference between process startup and
termination excluding Discovery, Routing, and Con-
figuration times.
Figure 3: Time Spent at Each Stage of Bootstrapping Strat-
egy 3: With Interceptor and Configuring Devices from
Leaves to Root.
As can be seen in Figure 4, we tested three dif-
ferent network plug-and-play strategies: pnp 1 – con-
necting devices directly to controllers (without CPI);
pnp 2 – connecting devices via CPI to controllers; and
pnp 3 - connecting devices via CPI to controllers and
using the “delayed discovery” approach. The strategy
pnp 3 is faster because it avoids waiting for the device
to became available to discovery. This is because the
new switch needs to perform routines with the ARP
and LLDP protocols to be able to communicate and
discover neighboring switches. Performing the dis-
covery stage right after configuring access flows can
cause first attempts to fail until ARP/LLDP runs. In
order to reduce this waiting time, a strategy called
“delayed discovery ” was proposed in which the new
switch is only discovered after being configured. This
strategy only works with CPI, because we need to
know the interconnection point of the new switch
without performing a discovery procedure. Figure 4
also shows that using a CPI can improve the plug-and-
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
112
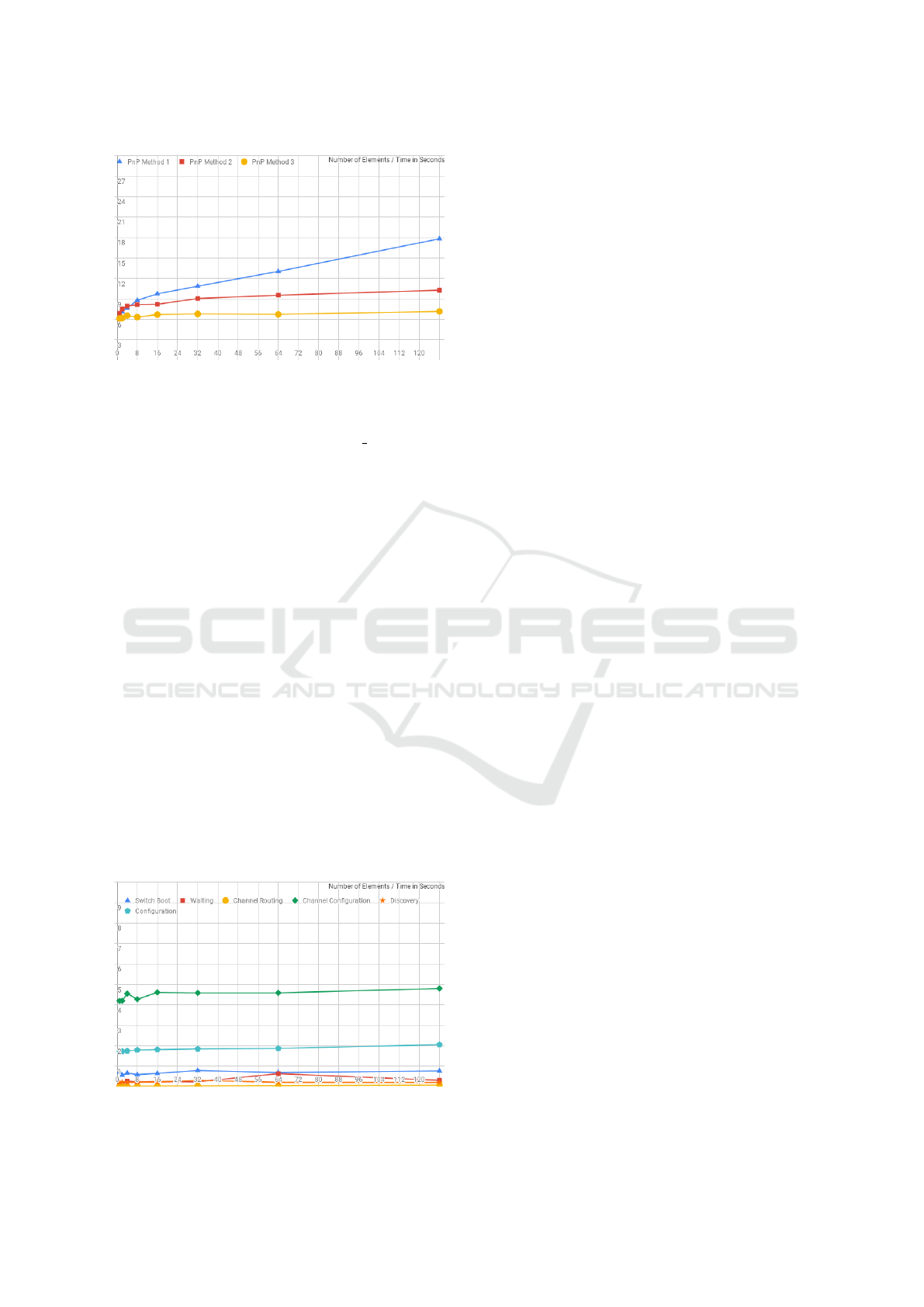
Figure 4: Time Comparison between the Three Plug-and-
Play Strategies Tested.
play speed due to the ease of knowing the attachment
point by simply checking the PACKET IN primitive
from OpenFlow protocol which is intercepted by CPI.
Figure 5 shows the time spent at each stage of the
plug-and-play with the pnp 3 strategy. Six measure-
ments were made: Switch Boot (time spent executing
the switch initialization script: starts with initializa-
tion of the container and ends with the assignment
of an address via DHCP); Waiting (indicates time
spent communicating between components, reaction
time to events, and synchronization: comprises the
difference between the total plug-and-play time and
the sum of times of the other steps); Channel Routing
(time spent calculating the best path to access the new
switch); Channel Configuration (time taken to apply
the new flow rules to the topology); Discovery (time
taken to discover and validate the new switch); and,
Configuration (time taken to configure the new switch
via OVSDB and deploy streams via SDN Controller).
As shown in the Figure 5, the time used with the pnp 3
strategy in all topologies tested showed low variation,
what indicates that the time for plug-and-play devices
with SONAr using this strategy tends to be constant.
The experiments presented in this section show
that SONAr provides a solution capable of automating
Figure 5: Time Spent at Each Stage of Plug-and-Play Strat-
egy 3: Using CPI and “delayed Discovery”.
the bootstrapping and plug-and-play of a self-defined
network and demonstrated the viability and validity
of the proposal of this work. The results also show
the general behavior of the time spent at each stage,
which is useful in network planning and also proves
the polynomial complexity of the solution.
6 CONCLUSION
This paper presented a conceptual solution to en-
able self-organizing networks focusing on self-
configuration property operations. Initially, SONAr
was presented with details about its components,
layers and design. Then, a case study with self-
configuration was conducted to verify the viability
and applicability of SONAr solution to address some
fundamental aspects of self-management: bootstrap-
ping and plug-and-play. The results were satisfac-
tory and demonstrated that SONAr can be applied to
reduce operating costs related to self-configuration.
We also conducted a review of the requirements of
telecommunications companies and their administra-
tors/network operators. These requirements allowed
the specification of SONAr presented in this paper.
Despite the gains in terms of OPEX, since SONAr
will automatically perform the configurations of the
network, the flexibility and the speed – with which
the infrastructure will respond to incidents – is essen-
tial to highlight the improvement in network security,
since the equipment no longer being accessed by hu-
mans for the purpose of (re)configurations.
SONAr solution is actually completely specified
in our research group and, for sake of space, a sum-
mary was presented in this document. It is impor-
tant to note that this project is being developed from
experiences with a local telecommunication operator.
Most components showed in Figure 1 are already fin-
ished and some components are being developed at
the present moment. The experiments presented in
this paper show the booting and configuration sce-
narios, which are the first steps to pass the computer
network from the non-operational to the operational
state. The experiments related to healing, optimizing,
protection and others are not presented here due to
space limitations.
The future works are to: (i) finalize the develop-
ment of all SONAr components, using programming
languages and frameworks widely used in industry;
(ii) list many use cases to evaluate all aspects of a
real telecommunications company; and (iii) compare
SONAr with other projects, integrating it where pos-
sible.
Bootstrapping and Plug-and-Play Operations on Software Defined Networks: A Case Study on Self-configuration using the SONAr
Architecture
113

ACKNOWLEDGEMENTS
This study was financed in part by the Coordenac¸
˜
ao
de Aperfeic¸oamento de Pessoal de N
´
ıvel Superior –
Brasil (CAPES) – Finance Code 001. This research
also received the support from PROPP/UFU.
REFERENCES
3GPP (2018a). Telecommunication management; Self-
configuration of network elements; Concepts and re-
quirements. Technical Specification (TS) 32.501, 3rd
Generation Partnership Project (3GPP).
3GPP (2018b). Telecommunication management; Self-
Organizing Networks (SON); Concepts and require-
ments. Technical Specification (TS) 32.500, 3rd Gen-
eration Partnership Project (3GPP).
3GPP (2018). Telecommunication management; Self-
Organizing Networks (SON); Concepts and require-
ments. Technical Specification (TS) 32.500, 3rd Gen-
eration Partnership Project (3GPP).
3GPP (2018a). Telecommunication management; Self-
Organizing Networks (SON) Policy Network Re-
source Model (NRM) Integration Reference Point
(IRP); Requirements. Technical Specification (TS)
32.521, 3rd Generation Partnership Project (3GPP).
3GPP (2018b). Telecommunication management; Self-
Organizing Networks (SON); Self-healing concepts
and requirements. Technical Specification (TS)
32.541, 3rd Generation Partnership Project (3GPP).
Abdallah, S., Elhajj, I. H., Chehab, A., and Kayssi, A.
(2018). A network management framework for sdn. In
2018 9th IFIP International Conference on New Tech-
nologies, Mobility and Security (NTMS), pages 1–4.
Bainbridge, L. (1983). Ironies of automation. Automatica,
19(6):775–779.
Barona L
´
opez, L., Valdivieso Caraguay,
´
A., Sotelo Monge,
M., and Garc
´
ıa Villalba, L. (2017). Key technolo-
gies in the context of future networks: operational and
management requirements. Future Internet, 9(1):1.
Bastug, E., Bennis, M., Medard, M., and Debbah, M.
(2017). Toward Interconnected Virtual Reality: Op-
portunities, Challenges, and Enablers. IEEE Commu-
nications Magazine, 55(6):110–117.
Boutaba, R. and Aib, I. (2007). Policy-based Management:
A Historical Perspective. Journal of Network and Sys-
tems Management, 15(4):447–480.
Cox, J. H., Chung, J., Donovan, S., Ivey, J., Clark, R. J., Ri-
ley, G., and Owen, H. L. (2017). Advancing software-
defined networks: A survey. IEEE Access, 5:25487–
25526.
Cui, C., Deng, H., Telekom, D., Michel, U., Damker, H.,
Italia, T., Guardini, I., Demaria, E., Minerva, R., and
Manzalini, A. (2012). Network Functions Virtualisa-
tion. SDN and OpenFlow World Congress.
d. R. Fonseca, P. C. and Mota, E. S. (2017). A sur-
vey on fault management in software-defined net-
works. IEEE Communications Surveys Tutorials,
19(4):2284–2321.
Duez, P. P., Zuliani, M. J., and Jamieson, G. A. (2006).
Trust by Design: Information Requirements for Ap-
propriate Trust in Automation. In Proceedings of the
2006 Conference of the Center for Advanced Studies
on Collaborative Research, CASCON ’06, Riverton,
NJ, USA. IBM Corp.
Feng, S. and Seidel, E. (2008). Self-organizing networks
(SON) in 3gpp long term evolution. Nomor Research
GmbH, Munich, Germany, pages 1–15.
Ganek, A. G. and Corbi, T. A. (2003a). The dawning of
the autonomic computing era. IBM systems Journal,
42(1):5–18.
Ganek, A. G. and Corbi, T. A. (2003b). The dawning of
the autonomic computing era. IBM systems Journal,
42(1):5–18.
Hariri, S., Guangzhi Qu, Modukuri, R., Huoping Chen,
and Yousif, M. (2005). Quality-of-protection (QoP)-
an online monitoring and self-protection mechanism.
IEEE Journal on Selected Areas in Communications,
23(10):1983–1993.
McKeown, N., Anderson, T., Balakrishnan, H., Parulkar,
G., Peterson, L., Rexford, J., Shenker, S., and Turner,
J. (2008). OpenFlow: Enabling Innovation in Cam-
pus Networks. SIGCOMM Comput. Commun. Rev.,
38(2):69–74.
Moysen, J. and Giupponi, L. (2018). From 4g to 5g: Self-
organized network management meets machine learn-
ing. Computer Communications, 129:248–268.
Neumann, J. C. (2014). The Book of GNS3. No Starch
Press, San Francisco, CA, USA, 1st edition.
Neves, P., Cal
´
e, R., Costa, M. R., Parada, C., Parreira,
B., Alcaraz-Calero, J., Wang, Q., Nightingale, J.,
Chirivella-Perez, E., Jiang, W., et al. (2016). The self-
net approach for autonomic management in an nfv/sdn
networking paradigm. International Journal of Dis-
tributed Sensor Networks, 12(2):2897479.
Ramirez-Perez, C. and Ramos, V. (2016). Sdn meets sdr
in self-organizing networks: fitting the pieces of net-
work management. IEEE Communications Magazine,
54(1):48–57.
Sanchez, J., Yahia, I. G. B., Crespi, N., Rasheed, T., and Sir-
acusa, D. (2014). Softwarized 5g networks resiliency
with self-healing. In 1st International Conference on
5G for Ubiquitous Connectivity, pages 229–233.
Simsek, M., Aijaz, A., Dohler, M., Sachs, J., and Fettweis,
G. (2016). 5g-Enabled Tactile Internet. IEEE Jour-
nal on Selected Areas in Communications, 34(3):460–
473.
Wickboldt, J. A., Jesus, W. P. D., Isolani, P. H., Both,
C. B., Rochol, J., and Granville, L. Z. (2015).
Software-defined networking: management require-
ments and challenges. IEEE Communications Mag-
azine, 53(1):278–285.
Zaidi, Z., Friderikos, V., Yousaf, Z., Fletcher, S., Dohler,
M., and Aghvami, H. (2018). Will SDN Be Part
of 5g? IEEE Communications Surveys & Tutorials,
20(4):3220–3258.
CLOSER 2020 - 10th International Conference on Cloud Computing and Services Science
114
