
Towards a Better Management of Emergency Evacuation using Pareto
Min Cost Max Flow Approach
Sreeja Kamishetty and Praveen Paruchuri
Machine Learning Lab, IIIT Hyderabad, Gachibowli, Hyderabad, India
Keywords:
Emergency Evacuation, Intelligent Transportation, Pareto Solutions, Min-Cost Max Flow Algorithm, Traffic
Theory, Modeling and Simulation, Cooperative Driving and Traffic Management.
Abstract:
Events during an emergency unfold in an unpredictable fashion which makes management of traffic during
emergencies pretty challenging. Furthermore, some vehicles would need to be evacuated faster than others
e.g., emergency vehicles or large vehicles carrying a lot more people. The Prioritized Routing Assistant for
Flow of Traffic (PRAFT) enables prioritized routing during emergencies. However, the PRAFT solution does
not compute multiple plans that can help handle better dynamic nature of emergencies. PRAFT maps the
prioritized routing problem to the Minimum-Cost Maximum-Flow (MCMF) problem, hence its solution can
accommodate maximum flow while routing vehicles based on priority (maps higher priority vehicles to better
quality routes (i.e., ones with minimum cost)). We build upon the PRAFT solution to make the following
contributions: (a) Develop a Pareto Minimum-Cost Maximum-Flow (Pareto-MCMF) algorithm which can
compute all the possible MCMF solutions. (b) Through a series of experiments performed using the well
known traffic simulator SUMO, we could show that all the solutions generated by Pareto-MCMF indeed have
properties similar to a MCMF solution thus providing multiple high quality options for traffic police to pick
from depending on the situation.
1 INTRODUCTION
Governments across the world need to be prepared to
handle evacuation of traffic during emergencies inde-
pendent of whether it is a frequent or rare occurrence
or whether it is an anticipated or unanticipated situa-
tion. Planning for such emergency situations needs to
consider a different set of factors than regular traffic
management (Pel et al., 2012)(Kwon and Pitt, 2005).
As mentioned in literature (Quarantelli, 1988)(Chen
et al., 2008), during emergency events it is reason-
able to assume that traffic police will perform a cen-
tralized control of traffic as they tend to have a bet-
ter idea of the situation. Prior work has shown dif-
ferent ways to plan for such emergency evacuation
(Yamada, 1996)(Hobeika and Kim, 1998). However,
emergency evacuation is usually dynamic in nature
since the intensity and effects of the emergency can
change with time (Turoff et al., 2004). Furthermore,
traffic behavior can be unpredictable during emergen-
cies that can add to the need for handling dynamic
situations (Sorensen et al., 1987) e.g., panic, conver-
gence (road blocks), failure to respond to evacuation
warning etc. Considering all these factors, it becomes
important to plan for alternate evacuation strategies or
plans beforehand.
During a typical evacuation, some vehicles would
need to be evacuated faster than others e.g., emer-
gency vehicles or large vehicles carrying a lot more
people (Jotshi et al., 2009), (Larson et al., 2006).
We therefore build upon the Prioritized Routing As-
sistant for Flow of Traffic (PRAFT) solution (Gupta
et al., 2018) which accounts for prioritized routing
during emergencies. PRAFT maps the prioritized
routing problem to the minimum-cost maximum-flow
(MCMF) problem, a standard problem formulation in
network flow theory, where priority refers to priority
of routes or priority of vehicles. Since the PRAFT
solution does not compute multiple plans we develop
a Pareto Minimum-Cost Maximum-Flow (Pareto-
MCMF) solution which can suggest multiple MCMF
solutions to the traffic police, each of which retains
characteristics of a MCMF solution i.e., can accom-
modate maximum flow while routing vehicles based
on priority measured using a cost function.
For illustration purposes, we assume that there are
6 paths between point A and B (path is a combination
of roads and intersections as described later). Sup-
Kamishetty, S. and Par uchuri, P.
Towards a Better Management of Emergency Evacuation using Pareto Min Cost Max Flow Approach.
DOI: 10.5220/0009395302370244
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 237-244
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
237

pose that the solution computed by MCMF includes
paths 2 and 5 expressed as {2, 5} with min cost of
x units. By using Pareto-MCMF, if we were able
to find 3 additional solutions: {1, 2, 4}, {4, 6} and
{3, 4, 5} each with cost x units (we skip details of
the number of vehicles in each path), we then have
4 solutions in total. Traffic police can use differ-
ent solutions for emergency evacuation based on the
current situation in different regions. Thus Pareto-
MCMF can (a) Suggest different evacuation plans be-
forehand while (b) Enabling the traffic police to max-
imize the traffic flow while allowing for prioritized
routing within the min cost paths. Traffic simulators
are a popular way to evaluate infrastructure and policy
changes before actually implementing them in real-
world (Paruchuri et al., 2002)(Balmer et al., 2006).
We evaluated our algorithm using Simulation of Ur-
ban Mobility (SUMO)(Behrisch et al., 2011)(Kra-
jzewicz et al., 2012), a free and popular microscopic
traffic simulator. We let SUMO handle all the low
level dynamics of vehicles i.e., we do not make any
changes to the dynamics apart from prescribing the
route a vehicle should take.
2 RELATED WORK
2.1 Emergency Evacuation
There are many emergency evacuation strategies that
have been studied such as contraflow, traffic sig-
nal optimization, ramp metering, crossing elimina-
tion among others. (Wang et al., 2012) uses con-
traflow with focus on traffic setup time in the case
of roadblocks and repairs. (Dong and Xue, 1997)
and (Kim et al., 2008) propose different contraflow
approaches which are considered a potential remedy
to solve congestion during evacuations in the context
of homeland security and natural disasters. However,
these solutions are complex and do not account for
vehicle priorities. Traffic signal optimization evac-
uation methods like (Chen et al., 2007) do not con-
sider priority and events such as congestion or road-
blocks. Methods like ramp metering(Daganzo and So,
2011) and cross elimination(Yuan et al., 2018) are
good for evacuation during emergencies but priority
of vehicles is difficult to adopt into them. (Jahangiri
et al., 2011) present an optimal signal timing method
to increase the outbound capacity of the network dur-
ing an emergency evacuation. (Vitetta et al., 2008)
propose two different approaches namely k shortest
path and genetic algorithm for vehicle routing prob-
lem during evacuation. (Yueming and Deyun, 2008)
employ evacuation route construction and traffic flow
assignment algorithms at each junction to route traffic
in evacuation area to a safe region rapidly and safely.
However, these works do not focus on the dynamic
aspects of evacuation while considering the priority
of vehicles.
2.2 Pareto Optimality
Pareto optimality is a state of allocation of resources
from which it is not possible to reallocate to make
any one individual agent or preference criterion bet-
ter off without making atleast one more agent or
criterion worse off. A pareto solution set is a set
of all such pareto optimal solutions (Nisan et al.,
2007). We use pareto optimal solutions and pareto
solutions interchangeably through the paper. For
purposes of this paper, a Pareto-MCMF refers to
the fact that given a min-cost max flow solution
we cannot decrease the cost of the solution or in-
crease flow on one route without decreasing flow
on atleast one other route. Hence for n possi-
ble MCMF solutions MIN(c
1
) = MIN(c
2
) = ... =
MIN(c
n
) and MIN( f
1
) = MIN( f
2
) = ... = MIN( f
n
),
where MIN(c
i
) and MAX( f
i
) represent the minimum
cost and maximum flow in the i
th
solution.
2.3 Min Cost Max Flow (MCMF)
Problem
The Ford-Fulkerson Algorithm (FFA) (Ford Jr and
Fulkerson, 2015), (Ford and Fulkerson, 1956) is a
popular algorithm to compute maximum flow in a
flow network be it water flow, liquid flow or flow
of traffic. The minimum-cost flow problem (MCFP)
(Goldberg, 1997) is an optimization and decision
problem to find the cheapest possible way of send-
ing a certain amount of flow through a flow network.
Multiple solutions exist in literature to solve this prob-
lem (Edmonds and Karp, 1972), (Galil and Tardos,
1988). The Minimum-cost Maximum-flow (MCMF)
problem is an extension to the Min cost flow problem
where we need to find the minimum cost to send the
maximum flow through the network (i.e., given flow
value is equal to the max flow). There are different
solutions developed such as the Cycle Cancelling Al-
gorithm (Goldberg and Tarjan, 1989), Hungarian Al-
gorithm (Kuhn, 2005) and others to solve the MCMF
problem. (Yamada, 1996) uses MCMF for shortest
evacuation plan in the city, but doesn’t consider pri-
ority. (Gupta et al., 2018) present PRAFT, which ac-
counts for prioritized routing during emergencies us-
ing a MCMF based approach. However, PRAFT gen-
erates one plan assuming the world remains static dur-
ing emergencies.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
238
3 ILLUSTRATIVE EXAMPLE
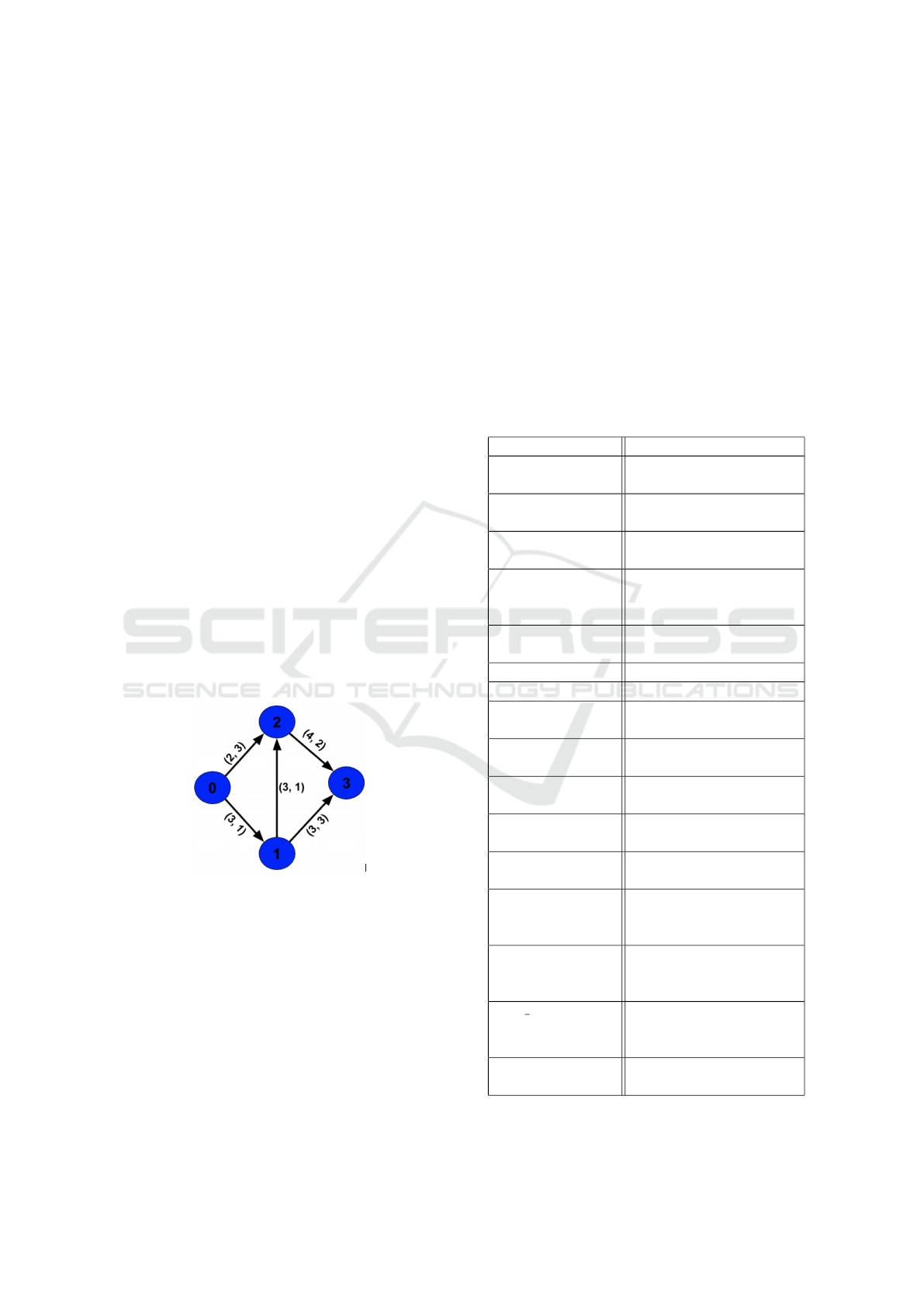
Figure 1 shows a road network (directed graph) with
4 vertices (or intersections) {0,1,2,3} and 5 edges (or
roads) 0 → 1, 0 → 2, 1 → 2, 1 → 3, 2 → 3. The source
vertex is 0 and the destination vertex is 3. There are
two values associated with each edge/road. The first
value marked on an edge represents the number of
lanes in that edge i.e., capacity of the edge. The sec-
ond marked value represents the priority of that edge.
4 ALGORITHM FOR MCMF
We now present a brief recap of the MCMF algorithm
presented as Algorithm 2 in (Gupta et al., 2018). The
algorithm as presented, has two different matrices for
the same network: (a) Capacity Matrix (for number
of lanes, i.e., width of the road) and (b) Cost matrix.
Both the matrices are of same dimension since they
are for the same graph. The algorithm uses Uniform
Cost Search (UCS) to guide its search for solution. In
particular, at every step of UCS the next node which
is expanded is the one whose cost g(n) is the lowest,
where g(n) is the sum of edge costs from the root to
the node n. However, the algorithm finds only one
MCMF solution. We therefore build upon this work
to develop the Pareto-MCMF, which can identify all
the possible max-flow solutions which can route the
flow for the (same) lowest cost.
Figure 1: Example road network.
Working of MCMF: For the graph in Figure 1, there
are 3 paths identified by UCS step:
• Path I: 0 → 1 → 3, Path II: 0 → 2 → 3 and Path
III: 0 → 1 → 2 → 3
with costs of 4, 5, 4 for the paths I, II and III respec-
tively. Since UCS picks paths based on the edge cost,
path I, path III and then path II are picked. Since paths
I and III have the same path cost, path I is picked first
as it is inserted first into the queue. 3 units of flow is
allowed in path I since the minimum edge capacity in
Path I is 3, which is then subtracted from the residual
graph. Residual graph with edges on Path I now have
0 capacity. Path III is considered next since it has the
minimum cost among the rest of paths. However, no
flow is allocated since 0 flow is allowed through edge
0 → 1. Path II is then considered where 2 units of
flow can be sent [as edge 0 → 2 has (lowest) capacity
of 2]. Paths I (3 units) and Path II (2 units) sum up
to 5 units of flow which is the maximum allowed flow
in the network. The cost of this allocation {3, 2, 0}
for paths I, II and III is 22 units (flow on Path I * cost
of Path I + flow on Path II * cost of Path II + flow of
Path III * cost of Path III = 3*4 + 2*5 + 0*4), which is
the minimum cost of all the maximum flow solutions
possible.
Table 1: Notation table for Pareto-MCMF algorithm.
Notation Description
G(V,E) Graph with V vertices
and E edges
G
f
(V,E) Residual Graph with V
vertices and E edges
c(U,V) Capacity of the edge
from U to V
c
f
(U,V) Capacity of the edge
from U to V in the resid-
ual graph
f(U,V) Flow of edge from U to
V
s Source node
t Sink node
pf priority function(cost of
edges)
mf(u, v) Max flow value from u to
v
mc(u, v) Min cost to send max
flow from u to v
tp(u, v) Set of total paths from u
to v
cp Set of total cost of all
paths from u to v
partition
i
Array representing in-
teger partition of m f
across paths in tp(s, t)
permutation
j
Array representing per-
mutation of values in
partition
i
cost permutation
j
Cost of solution for the
corresponding flow dis-
tribution in permutation
j
permutation
j
[p] Flow value for the path p
in permutation
j
Towards a Better Management of Emergency Evacuation using Pareto Min Cost Max Flow Approach
239

5 Pareto-MCMF ALGORITHM
Pareto Min Cost Maximum Flow (Pareto-MCMF) al-
gorithm works on a directed graph and aims to find
all the possible MCMF solutions i.e., find all the so-
lutions that allow the maximum number of vehicles to
flow (i.e., max flow) from a source to a sink that have
minimum cost among all the possible solutions. We
define cost of the solution as follows, where a
i j
repre-
sents the weight/priority of edge between the ith and
jth vertex while f
i j
is the flow through the same edge.
Cost of solution =
∑
i, j
a
i j
∗ f
i j
The Pareto-MCMF algorithm starts with comput-
ing the maximum flow and minimum cost possible
through the network using the MCMF algorithm men-
tioned earlier and stores it in the variables m f and mc
respectively (as shown in line 2 of Algorithm (1)). In
line 3, we use Breadth First Search (BFS) (Zhou and
Hansen, 2006) to compute all the possible paths from
source to sink and store the set of paths in t p(total
paths) along with storing the cost of each correspond-
ing path in cp(cost of paths). Cost of the path is the
sum of edge costs of each edge/road along the way
from source to sink, where cp[i] is set to the cost of ith
path stored in t p. Let’s assume we identified n such
paths i.e., cardinality(t p) = n. A valid flow solution
uses these n paths such that: (a) The flow through a
path is conserved i.e., for every path, flow input at
the source is the same as the flow through all its con-
stituent edges and finally received at the sink and (b)
If an edge (u, v) is part of k paths, then the sum of the
flow through all k paths should be less than or equal
to the capacity of the edge c(u, v).
Using the flow value stored in m f , a partition gen-
erator generates distributions of the flow across all n
paths. In number theory and combinatorics, a parti-
tion of a positive integer n also called an integer par-
tition, is a way of writing n as a sum of positive inte-
gers. Two sums that differ only in the order of their
summands are considered the same partition (Con-
tributors, 1999). Generating partitions can be com-
pared to distributing m f objects into n identical boxes,
where every box has a minimum capacity of 0 and a
pre-decided maximum capacity of c
i
. For instance,
we can partition a flow of 3 among 2 paths as: (0 +3)
stored as {0, 3} and (1 + 2) as {1, 2}. Note that {1,
2}, implies a flow of 1 through the first path and 2
through the second. Every permutation of such a par-
tition could be a possible maximum flow solution. We
therefore permute these partitions so we consider all
the possibilities e.g., {3, 0} along with {0, 3} and {2,
1} along with {1, 2}. Thus, in lines 5 to 6, the max-
imum flow is partitioned across n paths as partition
i
and every permutation permutation
j
of partition
i
is
Algorithm 1: Algorithm for Pareto Minimum-cost
Maximum Flow.
1 Pareto-MCMF algorithm;
Input : Given a network G(V,E) with flow
capacity c, weight of edge w, with
source node s and sink node t.
Output: Compute all possible ways in which
vehicles can be sent from s to t to
get the maximum flow with
minimum cost.
2 m f , mc = MCMF(G,s,t)
3 t p(s,t), cp(s,t) = BFS(G, s,t)
4 solutions ←
/
0
5 For each partition
i
∈ partitions(m f ,t p):
6 For each permutation
j
∈
permutations(partition
i
):
7 G
f
(V,E) ← G(V,E)
8 cost permutation
j
= 0
9 For each path p from s to t ∈ t p(s,t):
10 cost permutation
j
= cost permutation
j
+ cp[p]*permutation
j
[p]
11 For each edge (u,v) ∈ p:
12 c
f
(u,v) ← c
f
(u,v) -
permutation
j
[p]
13 If c
f
(u,v) < 0
14 break
15 If permutation
j
/∈ solutions and
cost permutation
j
== mc:
16 solutions.append(permutation
j
)
17 return solutions.
validated. This is done by iterating through each
path and ensuring that for each edge (u,v), its max-
imum capacity c(u,v) is not exceeded by the flow
solution or its residual capacity c
f
(u,v) remains ≥
0 (shown in lines 11 to 14). We also track cost
of the solution in line 10 i.e., cost of the permuta-
tion (cost permutation
j
) obtained by summing up the
product of flow value and cost of the path in the per-
mutation. In line 16, we append the newly verified
flow solution to the output set if not already present
in the set and the cost of the solution equals the min-
imum cost calculated in line 2. The set of flow solu-
tions are represented as an array of n values, where the
i
th
value represents the flow through the i
th
path from
source to destination. Hence using Pareto-MCMF, we
can obtain the set of all solutions that guarantee the
maximum flow from source to destination at the least
cost. Note that this is offline planning with a one-time
computation involved for the entire network. Once
identified, different solutions can be used for emer-
gency evacuation based on the different conditions
like traffic, roadblocks, congestion etc., thus enhanc-
ing the ability to save lives.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
240
Approximate Pareto-MCMF: If the number of
Pareto-MCMF solutions happen to be less than the
number of options, we may relax the minimum cost
(mc) condition used in Pareto-MCMF as below. The
goal here is to allow solutions to be accepted as part of
Pareto set even if the max flow solution is not of low-
est cost but within some bounds (where ε is tolerance
allowed) i.e., mc ≤ cost permutation
j
≤ mc + ε
6 Pareto-MCMF ON EXAMPLE
SETUP
We now show trace of Pareto-MCMF solution for the
same graph in Figure 1. In line 2, Pareto-MCMF iden-
tifies the maximum flow(m f ) to be 5 and the mini-
mum cost(mc) to be 22 (determined using MCMF).
In line 3, it then identifies following three paths from
source to destination:
• Path I: 0 → 1 → 3, Path II: 0 → 2 → 3, Path III:
0 → 1 → 2 → 3
Line 5 of Pareto-MCMF algorithm calculates the par-
titions of m f (= 5) as {0, 0, 5}, {0, 1, 4}, {0, 2, 3}
and {1, 2, 2}. Here {0, 1, 4} represents that 0 units
of traffic(vehicles) is flowing on Path I, 1 unit on path
II and 4 units on path III. Line 6 then permutes {0,
0, 5} into 3 unique permutations i.e., {0, 0, 5}, {0, 5,
0} and {5, 0, 0}, however all these permutations are
invalidated by lines 11 to 14 as they violate the maxi-
mum flow conditions. Likewise {0, 1, 4} has 6 unique
permutations i.e., { {0, 1, 4}, {0, 4, 1}, {1, 0, 4}, {1,
4, 0}, {4, 0, 1} and {4, 1, 0} }. Four of these {1, 2,
0}, {1, 0, 2}, {2, 0, 1} and {0, 2, 1} are invalidated by
lines 11 to 14 similarly as they violate the maximum
capacity constraints of the constituent edges. {0, 2,
3} have 6 permutations out of which only {3, 2, 0}
is valid. Finally {1, 2, 2} have 3 permutations out of
which {1, 2, 2} and {2, 2, 1} give the min cost of 22.
We now have 3 ways to distribute the flow of 5 across
the three paths with min cost of 22 which gives us the
solution set. Finally {3, 2, 0}, {1, 2, 2} and {2, 2, 1}
are the Pareto-MCMF solutions. This contrasts with
MCMF algorithm that provides only one solution ({3,
2, 0} as seen in section 4).
Dispatching Strategy: As mentioned earlier, vehi-
cles will be released in waves and each wave will have
vehicles less than or equal to the maximum flow (5 in
our example). In wave 1, assume that we have 5 ve-
hicles v1,v2, v3,v4, v5 generated with priority 5, 4, 2,
3, 1 [Higher number implies higher priority]. From
the example, we have three pareto-MCMF solutions
i.e., {3, 2, 0}, {1, 2, 2} and {2, 2, 1}. Pareto-MCMF
maps priority of vehicles to priority of paths in de-
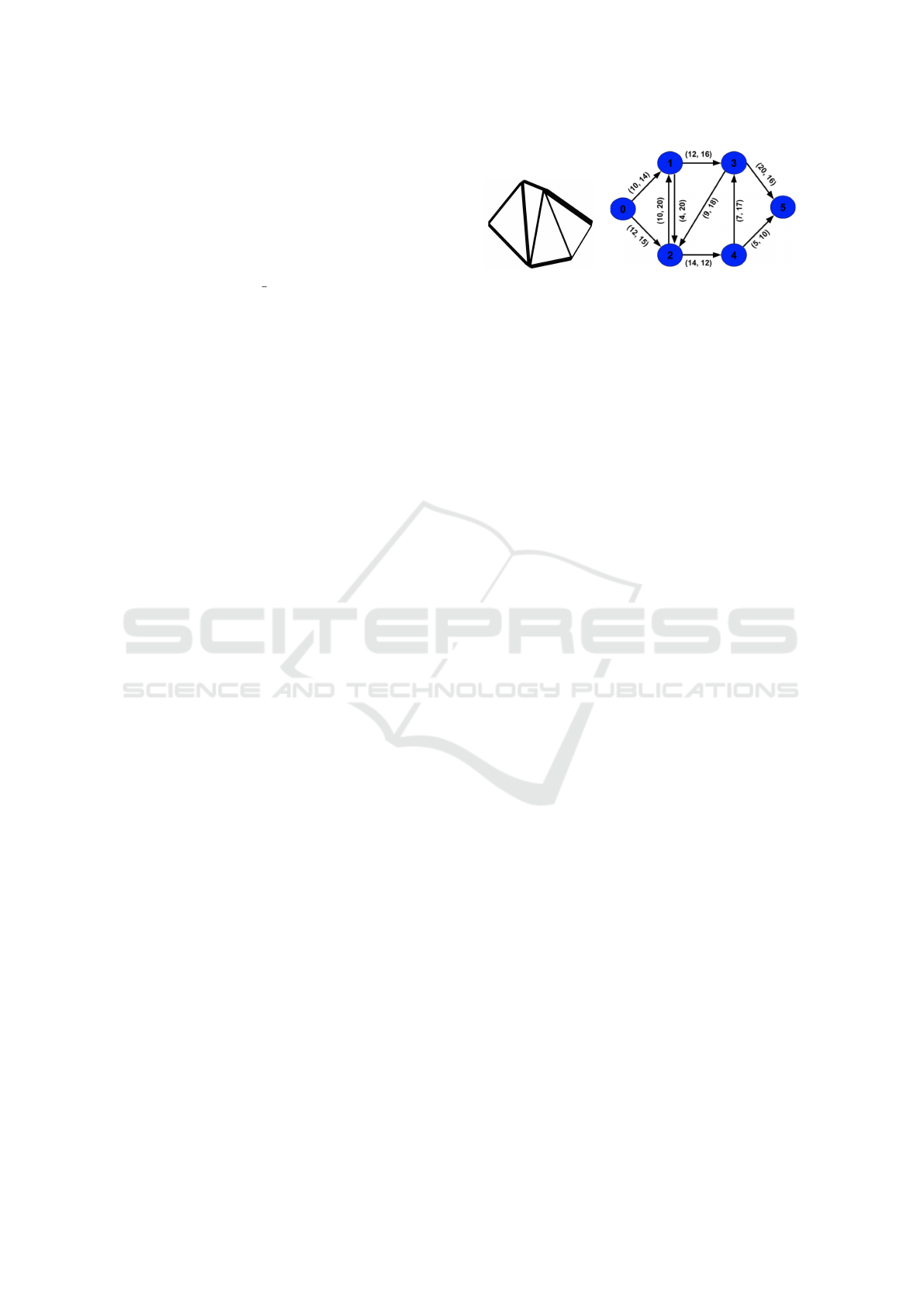
Figure 2: Road map and its corresponding graph.
scending order i.e., we assign vehicles in the order of
routes identified (Path I, Path III and then Path II). For
the first solution {3, 2, 0}, vehicles v1, v2,v4 will be
assigned to Path 1 and v3,v5 to Path II. In the case of
second solution {1, 2, 2}, v1 is assigned to Path I, v2,
v4 to path III and v3, v5 to Path II respectively. Com-
pared to a general max flow solution, all the solutions
of pareto-MCMF will result in either lower travel time
or lower fuel consumption (depending on the metric
we model), taking all the vehicles into consideration.
7 EXPERIMENTAL SETUP
Road Network: For experimentation purposes, we
consider a point close to the area of emergency as the
source point (or starting point) of evacuation and a
safe point i.e., a place from where vehicles can safely
exit the system as sink point. While we model a single
sink problem, prior work has shown how to abstract a
multi-source multi-sink problem into a single-source
single-sink problem (Megiddo, 1974). The road map
is represented as a graph where intersections are mod-
eled as nodes and roads are modeled as edges of the
graph. Every edge is associated with two values: the
first value is the weight of the edge which is the num-
ber of lanes in the road while the second value indi-
cates the cost/priority to traverse the edge (modeled
as distance/speed limit). For evacuation purposes, we
consider only the roads that fall within a certain radius
of the source node and lead to destination within rea-
sonable distances. An example road map we use for
our experiments is provided in Fig. 2 along with its
modeling as a graph. As shown in the figure, there are
6 intersections numbered 0 to 5 and directed edges be-
tween the intersections showing the direction of flow
of traffic. The number on each edge represents the
weight of the edge which for purposes of this paper
is modeled as the number of lanes in the road corre-
sponding to that edge. Priority/cost is modeled as the
time taken to traverse an edge (i.e., the distance be-
tween the nodes of an edge/max speed of the road).
The max flow for this network comes out to be 22 and
number of Pareto-MCMF solutions found is 3.
The start/source vertex of our simulation is 0 and
Towards a Better Management of Emergency Evacuation using Pareto Min Cost Max Flow Approach
241

the destination vertex is 5. We assume that no vehi-
cle starts between nodes 0 and 5. The police agent
would then provide routes for each vehicle, that en-
ables maximum flow in the network. We let SUMO
handle all the vehicle dynamics (e.g., speed, accel-
eration, interaction with other vehicles like overtak-
ing etc.). Each wave of vehicles is released every
(flow wave time) set to 5 seconds in our simulation,
so we give enough time for vehicles to cover a safe
distance before the next wave enters. Note that a route
here specifies only the path to take from source to
sink node but does not identify the specific lane to
take, speed to travel and other dynamics that SUMO
specifies. We borrowed this setup from prior work on
emergency evacuation (Gupta and Paruchuri, 2016).
7.1 Sumo Parameters
We assume traffic at the start of experimentation to
be negligible and traffic lights are not being used in
the simulation since it is an emergency situation and
we assume that police would have control over the
situation. The characteristics of each vehicle shown
in Table 2, are the default values defined by SUMO
(SUMO contributors, 2018). All the vehicles in our
experiments follow these parameters unless specified
otherwise. A total of 6600 vehicles were modeled in
each of our experiments.
Vehicle Modeling in SUMO: For each vehicle routed
through the network, SUMO assigns an identifier (i.e.,
name), type id, route id, time step of depart, depart-
Lane, departPos, departSpeed and similar for arrival
related data i.e., arrivalLane, arrivalPos and arrival-
Speed. SUMO has provision to add more details for
each vehicle such as the departure and arrival prop-
erties, lane to use, velocity or position of the vehi-
cle. There are different vehicle classes in SUMO
such as bus, car and others. Each class has associated
shape, dimensions, minimum gap, maximum acceler-
ation (a max), maximum deceleration (b), length of
the vehicle(l), maximum speed (v max) and emission
class. All the vehicle characteristic values used in this
paper (as presented in Table 2) are default values de-
fined by SUMO (SUMO contributors, 2018).
Table 2: Vehicle characteristic and its value in simulation.
Characteristic of vehicle Value
Maximum speed 180 kph
Maximum Acceleration 2.9 meters/s
2
Maximum Deceleration 7.5 meters/s
2
Minimum gap between vehicles 2.5 meters
Length of the vehicle 4.3 meters
Table 3: Count of Vehicles for each type of priority.
Priority Type 1 Type 2 Type 3 Type 4
Count 1200 1500 1800 2000
8 EXPERIMENTS
We perform a variety of experiments as showcased
below. All our results are obtained as an average over
30 runs (unless specified otherwise).
8.1 Individual Characteristics of
Pareto-MCMF Solutions
In this experiment, we examine the effect of mod-
eling priorities on routing of vehicles. In particular,
we modeled 4 priority classes/categories for vehicles.
We then find all the possible solutions/routes using
the Pareto-MCMF algorithm, with priority modeled
as the estimated time needed to traverse the route (i.e.,
distance/speed limit). Table 3 shows the priority type
and count of vehicles present in the simulation with
that priority. The Pareto-MCMF identified 3 different
MCMF solutions for this experiment. We then oper-
ationalize each of the solutions in the simulation as
follows: Pareto-MCMF maps a descending priority
of vehicles to routes with descending priority i.e., the
highest priority vehicles (Type 1) are first assigned to
the highest priority routes (i.e., routes with lowest es-
timated travel time), Type 2 vehicles with next high-
est priority are considered next and so on and they are
mapped to routes in descending order of priority.
For each of the Pareto-MCMF solutions, we com-
pare the individual vehicle behaviors during the en-
tire simulation. We first compute the time needed to
evacuate each individual vehicle in seconds for all the
Pareto-MCMF solutions. We also have different col-
ors for vehicles with different priorities. For example,
we use red for Type 1 (highest priority) vehicles, blue
for Type 2 and so on as indicated in the figures.
Figure 3 shows three scatter plots with simulation
time on x-axis from 0 to 1500 seconds and time taken
by each vehicle to exit the simulation in seconds on
y-axis. A total of 6600 points are represented in each
of the plots in the figure, one point per vehicle. Given
that 22 vehicles are released per wave (i.e., every 5
seconds), we have (6600/22) * 5 = 1500 seconds for
all the vehicles to be released. The plots show that
each of the Pareto-MCMF solutions results in a scatter
plot which is neatly distributed in terms of priorities.
The reason here is that higher priority vehicles are
explicitly assigned higher priority routes i.e., routes
with shorter time to finish evacuation while the vehi-
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
242
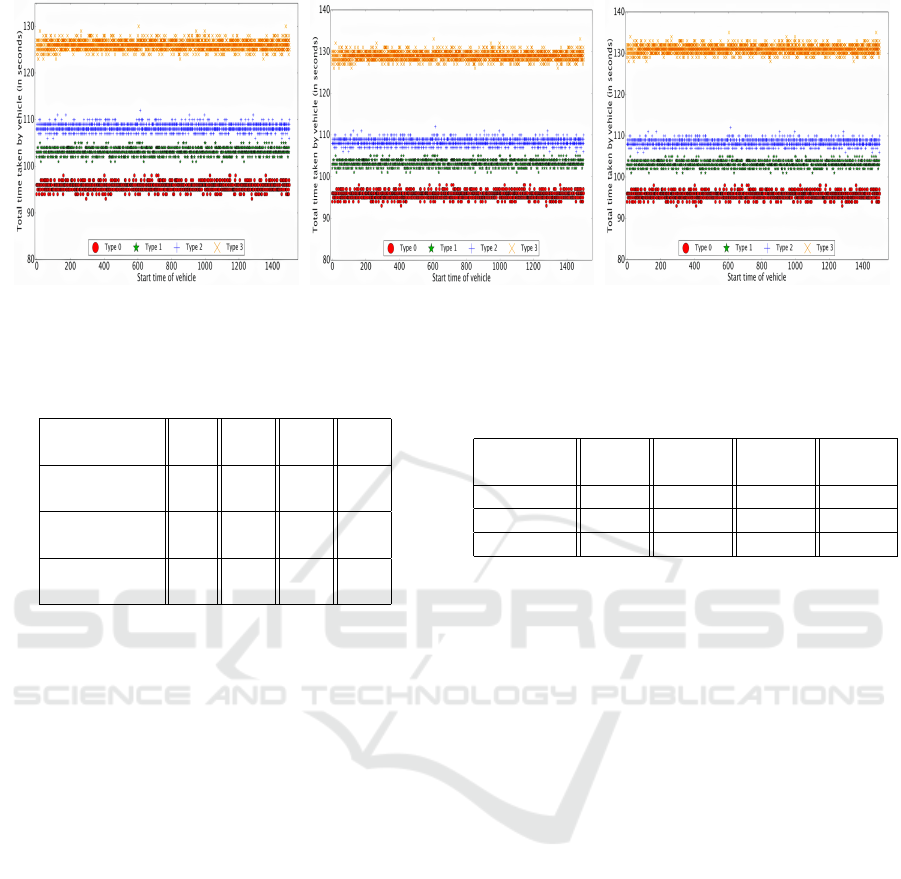
(a) First Pareto-MCMF solution (b) Second Pareto-MCMF solution (c) Third Pareto-MCMF solution
Figure 3: Scatter Plots for Pareto-MCMF solutions.
Table 4: Parameter values for different vehicles (B = Bus, T
= Truck, C = Car, M = Motorcycle).
Vehicle
Type
B T C M
Acceleration
(in m/s
2
)
1.5 3 5 6
Deceleration
(in m/s
2
)
4 4 7.5 10
Max speed
(in km/hr)
85 130 180 200
cles with lower priority are assigned routes which take
longer to evacuate. Hence the reason we see a clear
distribution where Type 1 vehicles need shortest time
to exit the simulation, Type 2 next and so on. To con-
clude, each Pareto-MCMF solution not only assigns
a faster route for high priority vehicles but also has a
predictable trend in the evacuation time for vehicles
of each priority category and each of the pareto so-
lutions can be used with similar effectiveness during
emergency evacuation.
8.2 Diversity of Parameter Values for
Vehicle Types
In this experiment, we use a different set of parame-
ters for the different vehicle types as presented in Ta-
ble 4 to model real-life scenarios better. In particular,
we assign higher priority to slower moving vehicles
and compute the average time taken by each vehicle
type using all the Pareto-MCMF solutions shown in
Table 5. From the table, we observe that the average
evacuation time in seconds (i.e., average time needed
to traverse from source to sink) for an individual ve-
hicle type is comparably similar across the different
pareto solutions. Pareto-MCMF would therefore be
pretty useful to traffic police and/or policy makers
since they can pick and use among the pareto solu-
Table 5: Average evacuation time for different solutions for
different vehicle types (B = Bus, T = Truck, C = Car, M =
Motorcycle, Soln. = Solution).
Vehicle
Type
B T C M
Soln. 1 95.09 103.95 108.35 131.53
Soln. 2 95.12 103.10 108.34 133.34
Soln. 3 95.13 103.15 118.38 134.86
tions depending on the situation while the solution
properties remain similar.
9 CONCLUSIONS
In this paper, we develop Pareto-MCMF algorithm
which identifies the set of all MCMF solutions. Since
emergencies are typically dynamic in nature, hav-
ing multiple plans beforehand would make it eas-
ier to tackle them. As evidenced in our experimen-
tal results, the different Pareto-MCMF solutions have
properties similar to a MCMF solution which can
make them useful in practice. As part of future work,
we plan to study further the nature of events that can
happen during an emergency and check if it is possi-
ble to create an ordering or specification of suitability
among the pareto optimal solutions. At this point the
different solutions are deemed equivalent till the traf-
fic police identify changes in ground situation that can
make some solutions better suited over the others.
REFERENCES
Balmer, M., Axhausen, K. W., and Nagel, K. (2006). Agent-
based demand-modeling framework for large-scale
microsimulations. Transportation Research Record,
1985(1):125–134.
Towards a Better Management of Emergency Evacuation using Pareto Min Cost Max Flow Approach
243

Behrisch, M., Bieker, L., Erdmann, J., and Krajzewicz,
D. (2011). Sumo–simulation of urban mobility: an
overview. In Proceedings of SIMUL 2011, The Third
International Conference on Advances in System Sim-
ulation. ThinkMind.
Chen, M., Chen, L., and Miller-Hooks, E. (2007). Traffic
signal timing for urban evacuation. Journal of urban
planning and development, 133(1):30–42.
Chen, R., Sharman, R., Rao, H. R., and Upadhyaya, S. J.
(2008). Coordination in emergency response manage-
ment. Communications of the ACM, 51(5):66.
Contributors, W. (1999). Partition (number theory).
Daganzo, C. F. and So, S. K. (2011). Managing evacuation
networks. Procedia-social and behavioral sciences,
17:405–415.
Dong, Z. and Xue, D. (1997). Intelligent scheduling of
contraflow control operation using hierarchical pat-
tern recognition and constrained optimization. In 1997
IEEE International Conference on Systems, Man, and
Cybernetics. Computational Cybernetics and Simula-
tion, volume 1, pages 135–140. IEEE.
Edmonds, J. and Karp, R. M. (1972). Theoretical improve-
ments in algorithmic efficiency for network flow prob-
lems. Journal of the ACM (JACM), 19(2):248–264.
Ford, L. R. and Fulkerson, D. R. (1956). Maximal flow
through a network. Canadian journal of Mathematics,
8(3):399–404.
Ford Jr, L. R. and Fulkerson, D. R. (2015). Flows in net-
works. Princeton university press.
Galil, Z. and Tardos,
´
E. (1988). An o (n 2 (m+ n log n)
log n) min-cost flow algorithm. Journal of the ACM
(JACM), 35(2):374–386.
Goldberg, A. V. (1997). An efficient implementation of a
scaling minimum-cost flow algorithm. Journal of al-
gorithms, 22(1):1–29.
Goldberg, A. V. and Tarjan, R. E. (1989). Finding
minimum-cost circulations by canceling negative cy-
cles. Journal of the ACM (JACM), 36(4):873–886.
Gupta, G., Kamishetty, S., and Paruchuri, P. (2018). A pri-
oritized routing assistant for flow of traffic. In 2018
21st International Conference on Intelligent Trans-
portation Systems (ITSC), pages 3627–3632. IEEE.
Gupta, G. and Paruchuri, P. (2016). Effect of human be-
havior on traffic patterns during an emergency. In
2016 IEEE 19th International Conference on Intel-
ligent Transportation Systems (ITSC), pages 2052–
2058. IEEE.
Hobeika, A. G. and Kim, C. (1998). Comparison of traffic
assignments in evacuation modeling. IEEE transac-
tions on engineering management, 45(2):192–198.
Jahangiri, A., Afandizadeh, S., and Kalantari, N. (2011).
The otimization of traffic signal timing for emergency
evacuation using the simulated annealing algorithm.
Transport, 26(2):133–140.
Jotshi, A., Gong, Q., and Batta, R. (2009). Dispatching and
routing of emergency vehicles in disaster mitigation
using data fusion. Socio-Economic Planning Sciences,
43(1):1–24.
Kim, S., Shekhar, S., and Min, M. (2008). Contraflow trans-
portation network reconfiguration for evacuation route
planning. IEEE Transactions on Knowledge and Data
Engineering, 20(8):1115–1129.
Krajzewicz, D., Erdmann, J., Behrisch, M., and Bieker,
L. (2012). Recent development and applications of
sumo-simulation of urban mobility. International
Journal On Advances in Systems and Measurements,
5(3&4).
Kuhn, H. W. (2005). The hungarian method for the as-
signment problem. Naval Research Logistics (NRL),
52(1):7–21.
Kwon, E. and Pitt, S. (2005). Evaluation of emergency
evacuation strategies for downtown event traffic using
a dynamic network model. Transportation Research
Record, 1922(1):149–155.
Larson, R. C., Metzger, M. D., and Cahn, M. F. (2006).
Responding to emergencies: Lessons learned and the
need for analysis. Interfaces, 36(6):486–501.
Megiddo, N. (1974). Optimal flows in networks with mul-
tiple sources and sinks. Mathematical Programming,
7(1):97–107.
Nisan, N., Roughgarden, T., Tardos, E., and Vazirani, V. V.
(2007). Algorithmic game theory, volume 1. Cam-
bridge University Press Cambridge.
Paruchuri, P., Pullalarevu, A. R., and Karlapalem, K.
(2002). Multi agent simulation of unorganized traffic.
In Proceedings of the first international joint confer-
ence on Autonomous agents and multiagent systems:
part 1, pages 176–183. ACM.
Pel, A. J., Bliemer, M. C. J., and Hoogendoorn, S. P. (2012).
A review on travel behaviour modelling in dynamic
traffic simulation models for evacuations. Transporta-
tion, 39(1):97–123.
Quarantelli, E. L. (1988). Disaster crisis management: A
summary of research findings. Journal of manage-
ment studies, 25(4):373–385.
Sorensen, J. H., Vogt, B. M., and Mileti, D. S. (1987). Evac-
uation: an assessment of planning and research. Tech-
nical report, Oak Ridge National Lab., TN (USA).
SUMO contributors (2018,). Vehicle type parameter de-
faults. [Content is available under Creative Commons
Attribution Share Alike].
Turoff, M., Chumer, M., de Walle, B. V., and Yao, X.
(2004). The design of a dynamic emergency response
management information system (dermis). Journal
of Information Technology Theory and Application
(JITTA), 5(4):3.
Vitetta, A., Quattrone, A., and Polimeni, A. (2008). Safety
of users in road evacuation: algorithms for path design
of emergency vehicles. WIT Transactions on the Built
Environment, 101:727–737.
Wang, J., Wang, H., Zhang, W., Ip, W., and Furuta, K.
(2012). Evacuation planning based on the contraflow
technique with consideration of evacuation priorities
and traffic setup time. IEEE transactions on intelli-
gent transportation systems, 14(1):480–485.
Yamada, T. (1996). A network flow approach to a city emer-
gency evacuation planning. International Journal of
Systems Science, 27(10):931–936.
Yuan, Y., Liu, Y., and Yu, J. (2018). Trade-off between sig-
nal and cross-elimination strategies during evacuation
traffic management. Transportation research part C:
emerging technologies, 97:385–408.
Yueming, C. and Deyun, X. (2008). Emergency evacua-
tion model and algorithms. Journal of Transporta-
tion systems engineering and information technology,
8(6):96–100.
Zhou, R. and Hansen, E. A. (2006). Breadth-first heuristic
search. Artificial Intelligence, 170(4-5):385–408.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
244
