
Capture of Multi Intruders by Cooperative Multiple Robots using
Mobile Agents
Tadashi Shoji
1
, Munehiro Takimoto
1
and Yasushi Kambayashi
2
1
Department of Information Science, Tokyo University of Science, 2641 Yamazaki, Noda 278-8510, Japan
2
Department of Computer and Information Engineering, Nippon Institute of Technology,
4-1 Gakuendai Miyashiro-machi, Minamisaitama-gun, Saitama 345-8510, Japan
Keywords:
Mobile Agents, Multi Robots, Intruder Capture Systems.
Abstract:
Detecting and capturing intruders are two of the most important function of multi-robot systems. In this paper,
we propose an effective approach to capture agile intruders with not-so-agile mobile robots. In general, it is
difficult to drive several robots to pursue moving objects while adjusting their behaviors. We make mobile
robots cooperate using two mobile software agents that control the mobile robots. The mobile software agents
migrate from one robot to another robot that is located at much suitable positions for guiding moving robots
to the target location. This control manner contributes to not only reduction of movement cost of the mobile
robots, but also their efficient movement without interference from other robots. We have implemented a
simulator, on which we demonstrated effectiveness of our control manner for intruders-capturing system.
1 INTRODUCTION
The advent of a combination of multiple robots and
multiple software agents is realizing a new stage of
cooperation of mobile robotic agents and humans.
We have engaged studies of mobile software agents,
and implemented several applications such as multi-
robot systems that cooperatively search objects (Na-
gata et al., 2013) and cooperatively compose forma-
tions (Shintani et al., 2011) (Kambayashi et al., 2019).
The persuasion is based on the finding that those sys-
tems are not only feasible but also enjoy the energy
saving and efficiency (Takimoto et al., 2007).
In this paper, we focus our attention on detection
and capture of multiple intruders in a building. De-
tecting and capturing intruders are two of the most
important applications of multi-robot systems. We in-
troduce a novel control system for chasing multiple
intruders into a corner in a building by multiple small
not-so-agile mobile robots. Considering the current
robotics technologies and safety requirements, it is
hard to obtain mobile robots as agile as human beings.
In order to cover the laggardness of mobile robots,
we have employed multiple small robots and mobile
software agents. We can arrange multiple small robot
sparsely distributed in a building, and make them co-
operate using mobile software agents that control mo-
bile robots. Since software agents can instantly move
from a robot to another robot, it can migrate to the
most suitably located mobile robot to capture the in-
truder. In addition to the instant migration of mobile
software agents, they can easily duplicate themselves
and simultaneously control multiple mobile robots to
achieve highly cooperative activities such as captur-
ing intruders. In this paper, we describe the fea-
tures of mobile software agents and explain how they
can make multiple mobile robots cooperate to capture
several intruders.
The rest of this paper is organized as follows. The
second section describes the background. The third
section describes the method for coordinating multi-
ple mobile robots using the mobile software agents.
Our mobile agent system consists of two kinds of mo-
bile software agents, i.e. ant agents and pheromone
agents. We describe each of them and present the
role and algorithm to implement the control system
for multiple robots’ coordination. The fourth section
describes the experiments on the simulator, and we
conclude our discussion in the fifth section.
2 BACKGROUND
We have previously presented a framework for con-
trolling intelligent multiple robots connected by wire-
370
Shoji, T., Takimoto, M. and Kambayashi, Y.
Capture of Multi Intruders by Cooperative Multiple Robots using Mobile Agents.
DOI: 10.5220/0009382503700377
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 1, pages 370-377
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

less communication networks (Shintani et al., 2011).
The framework makes the multiple mobile robots
indirectly cooperate one another and accomplishes
highly coordinated actions. The core of the frame-
work consists of two kinds of mobile software agents,
namely pheromone agents and ant agents. The idea of
pheromone agents is inspired by the behaviors of so-
cial insects, i.e. ants. In the algorithm, agents mimic
the behaviors of ants communicating with each other
by an indirect communication mediated by modifica-
tions of the environment called stigmergy. The behav-
ioral scientists Goss et al. found that ants exchanged
information by laying down a trail of a chemical sub-
stance called pheromone that is followed by other ants
(Goss et al., 1989). Dorigo et al. abstracted the behav-
iors of ants and applied the extracted algorithm to de-
rive a quasi-optimal solution for NP-complete prob-
lems (Dorigo et al., 1996). Later, Dorigo et al. suc-
cessfully applied the idea to control and coordinate
swarm robots (Dorigo, 2005). Their SWARM-BOTS
project is today considered as the pinnacles of many
multi-robot projects. There are also studies that aim to
compose a circle formation in a two dimensional or-
thogonal coordinate system using mobile agents and
their sensors (Yang and Wang, 2019), (Song et al.,
2019).
Kambayashi et al. presented capturing single
intruder strategy using vector value between robots
(Kambayashi et al., 2020). We improved this strategy
more effectively and adapted for multiple intruders.
We aim to capture intruders using vector values that
points mobile agents on multiple robots and intruders.
3 SINGLE INTRUDER
STRATEGY
Captor robots are small mobile robots. They do not
attack an intruder violently. They quietly chase and
drive him or her into the designated capture loca-
tion. Kambayashi’s system (Kambayashi et al., 2020)
consists of robots and two kinds of mobile software
agents, namely ant agents and pheromone agents.
All the controls for the mobile robots are achieved
through ant agents. Each mobile robot has Wi-Fi ca-
pability. They are connected through wireless LAN.
Each ant agent can freely move among the herd of
mobile robots. Since the ant agents control the robots,
captor robots without ant agents just sit and sense the
environments quietly, while ant agents are hopping
from a robot to another robot to patrol the sensing area
by checking the quietly sitting robots’ sensors. We
assume the captor robots have enough sensors such
as optical cameras and ultrasonic sensors to detect an
intruder.
Once an ant agent arrives at a captor robot who
senses an intruder, it drives the robot to hunt down
the suspect and simultaneously dispatches pheromone
agents to rally nearby robots to bring the intruders to
the bay. We describe the ant agents and pheromone
agents in the following sections.
3.1 Ant Agent
The ant agent (AA) has the following six capabilities.
1) It drives a robot on which it resides depending on
the specific state they can take. 2) It can migrate from
a robot to another robot through wireless LAN. 3) It
has the IP addresses of all the participating robots. 4)
It creates pheromone agents that attract other mobile
robots. 5) It can have four states and changes its state
as the situation changes. 6) It can acts depending on
the current state.
Without AAs, mobile robots cannot even move;
they are just sitting quietly. Therefore, at the initial
phase, we make a number of AA migrate into the herd
of the mobile robots. Each AA looks for an idle robot
(a robot without AA) that it can drive. Once an AA
arrives on a robot, it is in the “search” state. After
that, AA changes its state depending on the environ-
mental conditions. The idea of changing state to make
AA perform different kinds of tasks is inspired from
(Takahashi et al., 2014).
Initially, the AA is in the “search” state. In this
state, the AA makes the robot randomly walk to find
a suspect. The robot has basic capability for colli-
sion avoidance by ultrasonic sensors and electronic
circuit. Each robot has basic capabilities to survive by
on-board controller without AA’s interference. The
robot’s visual sensor can sense objects in the fan-
shaped area with 45 degrees to the right and left from
its driving direction. When the AA finds an intruder
in its fan-shaped sensing area through robot’s visual
sensor, it changes its state to “chase.”
In the “chase” state, the AA drives its robot to-
ward the intruder while it gives intimidation by warn-
ing sound and flashing light, and tries to drive the
intruders to the designated capture location. Since
the mobile robots are not as agile as human intruder,
it cannot capture or drive the intruders into the cap-
ture location alone. It needs fellow robots to drive
the intruders in cooperation with them. In order to
obtain the cooperation from other robots that do not
sense the intruders, the chasing robot changes its state
into “attract” temporarily, and creates and dispatches
pheromone agents.
In the “attract” state, AA creates and dispatches
pheromone agents as many as it can find other AAs in
Capture of Multi Intruders by Cooperative Multiple Robots using Mobile Agents
371
search state. A pheromone agent (PA) is the other
kind of mobile agents, and its purpose is to share
information about the intruders with other robots in
search state within the wireless communication range.
PA has a vector value that points from the robot that
creates the PA to the intruder, so that the PA can
tell another robot to which direction the robot should
move to find the intruder. After dispatching PAs,
the AA resume to the “chase” state, and continues to
chase the intruder.
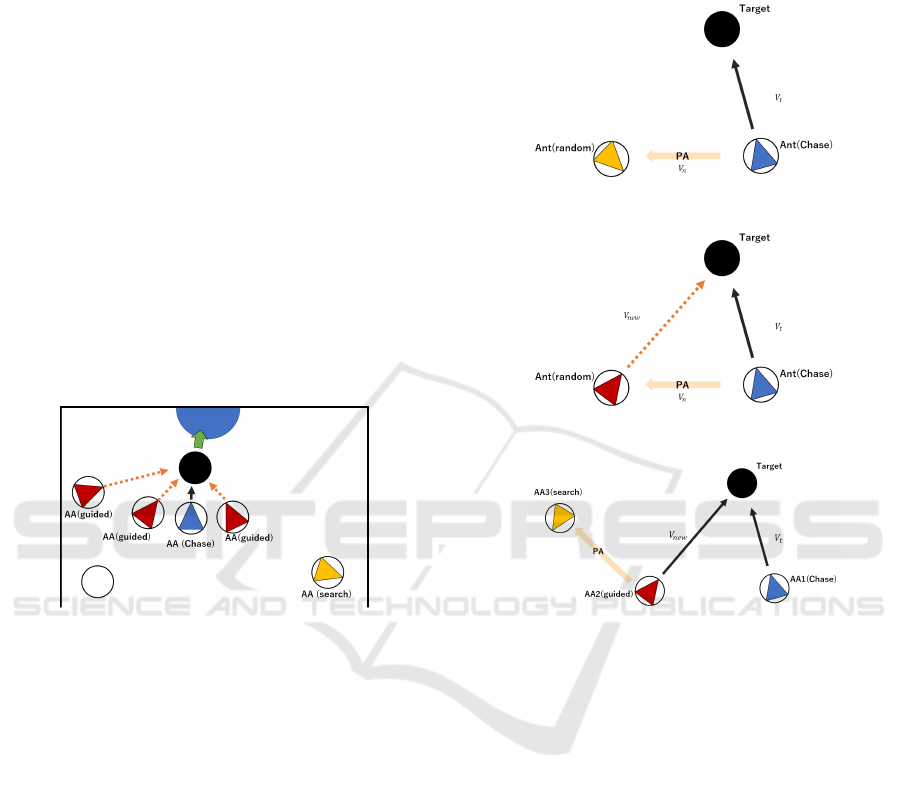
When an AA receives a PA from a chasing AA,
the AA transits to be in the “guided” state, as shown
in Figure 1. In the guided state, the AA moves fol-
lowing the vector value that is given by the arriving
PA until it finds the intruder. When AA finds the in-
truder, it changes its state from “guided” to “chase”
and starts chasing the intruder based on its own sen-
sor information. If AA cannot find the intruder after
certain period, it changes its state to “search” again,
and starts random walk. We describe how a PA plays
its role in the next section.
Figure 1: AA’s method.
3.2 Pheromone Agent
The pheromone agent (PA) is a mobile agent that
guides AA to the destination of vector value which
it has. Figure 2 and Figure 3 show how a PA guides
and makes a searching robot chase an intruder in co-
operation with other chasing robot. AA1 finds a robot
controlled by AA2 and is randomly walking while it
is chasing an intruder. Since each robot has a visual
sensor, AA1 can calculate the intruders coordinate V
t
.
Since mobile robots are not agile enough to capture
an intruder alone, it needs the other robots’ assistance.
AA1 finds a robot, and also finds AA2 is driving the
robot. AA1 decides to make that robot participate in
the chase. AA1 creates a pheromone agent with the
vector value V
new
that points to the intruder, and dis-
patches the PA to the robot where AA2 is driving. The
vector value V
new
is calculated by the equation(1).
V
new
= V
t
− V
n
(1)
Upon receiving the PA, AA2 changes its state
“search” to “guided” and starts following the guid-
ance of PA. When AA2 find an intruder, AA2 changes
its state to “chase” and then “attract”, and dispatches
PA to yet another robot as shown in Figure 4.
Figure 2: Before: PA how to attract AA.
Figure 3: After: PA how to attract AA.
Figure 4: Dispatching PA repeatedly.
4 MULTIPLE INTRUDERS
STRATEGY
Our previous method worked well for a single in-
truder. On the other hand, it did not effectively work
for multiple intruders shown in later comparative ex-
periment. Also, as the number of robots is increased,
we have observed that robots frequently collided with
each other. Since the collision, consumes a lot of steps
for recovering from it, so that the time cost to cap-
ture intruders increases. Thus, in order to achieve ef-
ficiently capturing multiple intruders, we had to solve
these problems. We address this problem through in-
troducing sophisticated guidance to colleague AAs
so that they can move to more suitable positions to
capture intruders, We also provide collision control
mechanism based on agent migration.
HAMT 2020 - Special Session on Human-centric Applications of Multi-agent Technologies
372
4.1 Ant Agent
In our previous approach, we often observed that an
intruder stacked in corners that are not the goal po-
sition. That is because AAs chase an intruder in a
straight way, and therefore it cannot escape once it
is driven to the corner. In order to avoid this situa-
tion, we give an AA different behaviors depending on
three areas that are determined with relative positions
of the AA and the goal. We call the areas “Inside”,
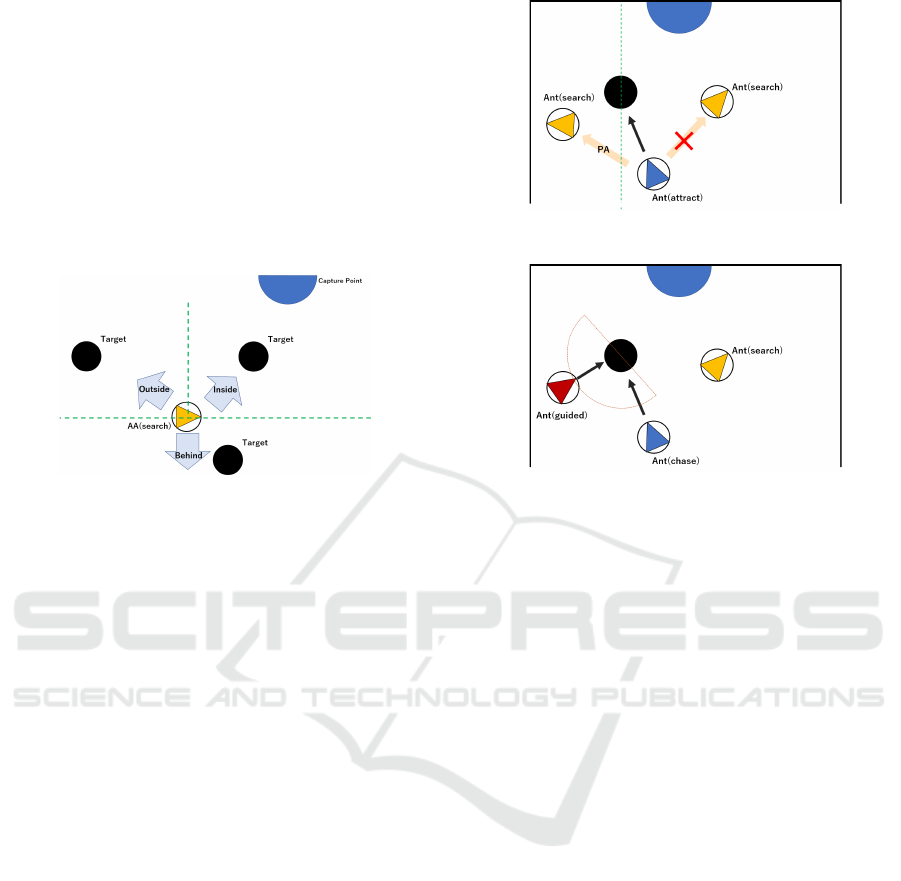
“Outside” and “Behind” as shown in Figure 5.
Figure 5: Situation with positions.
If an intruder is in “Inside” area, it means the intruder
is closer to the goal than the robot with AA, the AA
basically performs the same behaviors as our previ-
ous method. Once AA finds an intruder, it changes
its state from “search” to “chase” and “attract”. In
the “attract” state, we have improved AAs’ behavior.
They create PAs in fan-shaped formation so that they
attract other robot only in front of them. We explain
the details of this improvement in the next section.
If an intruder is in “Outside” area, it means the
intruder is far from the line between the robot with the
AA and the goal, but the intruder’s position is closer
to the goal than the AA’s robot. In this situation, the
AA creates PAs, and dispatches them to other robots
in the other side of the line between the intruder and
the goal as shown in Figures 6 and 7. In this situation,
if AA chases an intruder straightly, the intruder can
escape to a corner of the field and stack there. On the
other hand, since other robots with AAs attracted by
our PAs chase from the corner side, we can avoid that
situation where the intruders to stack at any corners.
If an intruder is in “Behind” area, it means the in-
truder is behind of the chasing robot, the driving AA
changes its state to “Jump” to migrate to another robot
behind the intruder as shown in Figure 8. In the fig-
ure, the chasing AA migrates (jumps) to a free robot
R2, which is at a more favorable position than R1.
In other words, in “Jump” state, AA looks for a free
robot, i.e. in this case R2, which is within the range of
PA, and behind the intruder, and migrates to the free
robot through wireless LAN.
At the same time, AA creates a PA, with a vector
Figure 6: Before: AA dispatches for limited robot.
Figure 7: After: AA dispatches for limited robot.
value that shows the location in accordance with fol-
lowing equation (2). In the equation, PA’s vector
~
V
RP
is determined as enclosing the intruder with the robot
R2 with the AA and the other robot attracted by PA.
as follows:
~
V
RP
=
~
V
RT
+
~
V
R1R2
(2)
Once PA are created in “Jump”, the AA dispatches
PA to robots behind the intruder. At the same time,
it migrates to the robot R2. Once AA jumps to R2,
R2 with AA1 goes toward the target after checking
around R2.
If AA cannot find any robot to which it mi-
grates, the AA just creates and dispatches PA to robots
behind the intruder, changes its state from “chase”
to “search” and gives up chasing the intruder. In
“search” state, AA drives a robot randomly. Once PA
migrates to a robot with such AA, the AA changes
its state to “guided”, where AA drives a robot along
guidance shown by a vector value of the PA.
4.2 Pheromone Agent Creation
In the improved method, we also made some adjust-
ments to the creation of Pheromone Agent. In the
previous PA creation manner, AA simply creates PA
behind the intruder. Such a creation manner works
well for a single intruder, but for multiple intruders, it
causes a lot of escapes. In our new creation manner,
the AA creates PAs in fan-shaped formation as en-
closing intruders as shown in Figures 10 and 11. The
fan-shaped creation is achieved as follows: 1) AA ro-
Capture of Multi Intruders by Cooperative Multiple Robots using Mobile Agents
373
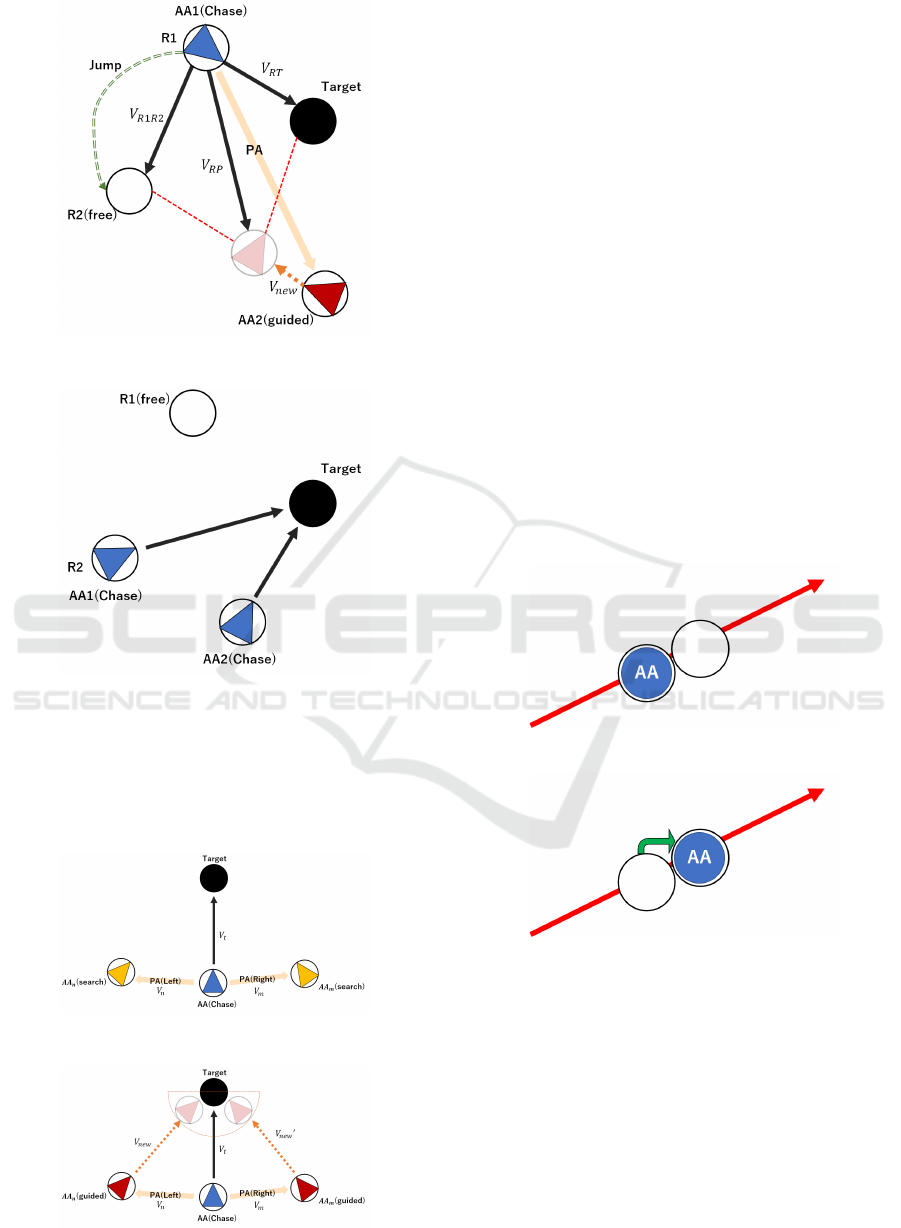
Figure 8: Before: Jump behind the intruder.
Figure 9: After: Jump behind the intruder.
tates the robot by facing with an intruder, and 2) the
AA creates two PAs in both sides respectively with a
little incline as shown in Figures 10 and 11.
Figure 10: Before: Fan-shaped formation with PA.
Figure 11: After: Fan-shaped formation with PA.
Notice that each PA is dispatched to robots where
they are at least robot size apart. Once other AAs
drive their robots and reach the designated points
based on guide of the PAs, they start chasing the in-
truder.
4.3 Collision Avoidance
Many robots may be in the same field. In such a sit-
uation, many collisions will occur. Such collisions
tend to disturb convergence of the system. In order to
suppress the frequent collisions, we introduce mobile
agent based collision avoidance mechanism. The col-
lision avoidance is achieved by simple migration of a
mobile agent between robots. For example, a robot
moving on a line is blocked by another robot on the
line as shown in Figure 12. In a mobile agent model,
the most important mission is making the robot that it
is driving. If the mission is to continue moving on the
line, the mobile agent on a robot can continue mov-
ing through migrating to the other robot and continue
moving as shown in Figure 13. In our system, an AA
has this migration property, which contributes to its
smooth movement as collision avoidance.
Figure 12: Before Agent Exchange.
Figure 13: After Agent Exchange.
5 EXPERIMENTAL RESULTS
In order to investigate the feasibility of our detec-
tion and capture system for multiple intruders, we
have implemented our system on a simulator and con-
ducted numerical experiments and comparative ex-
periments with our previous method. In the experi-
ments, we assume the following conditions.
• Robots are scattered in a 500 x 500 square field in
the simulator.
HAMT 2020 - Special Session on Human-centric Applications of Multi-agent Technologies
374
• The capture location is set at one edge of the field.
• The number of robots and AAs is selected from 5,
10, 30, 50, 75, 100 and 200.
• The number of AAs is limited to the number of
robot.
• The maximum number of intruders is 5.
• Robots and intruders are randomly placed in the
field.
• The range of communication network for each
robot is 200 units and the range of sensor is the
same.
• Each robot can move 1 unit and each intruder can
move 1.5 units in each step in the simulator.
• In each trails, the maximum number of steps is
limited to 10,000 and the trail is counted to “miss”
trail.
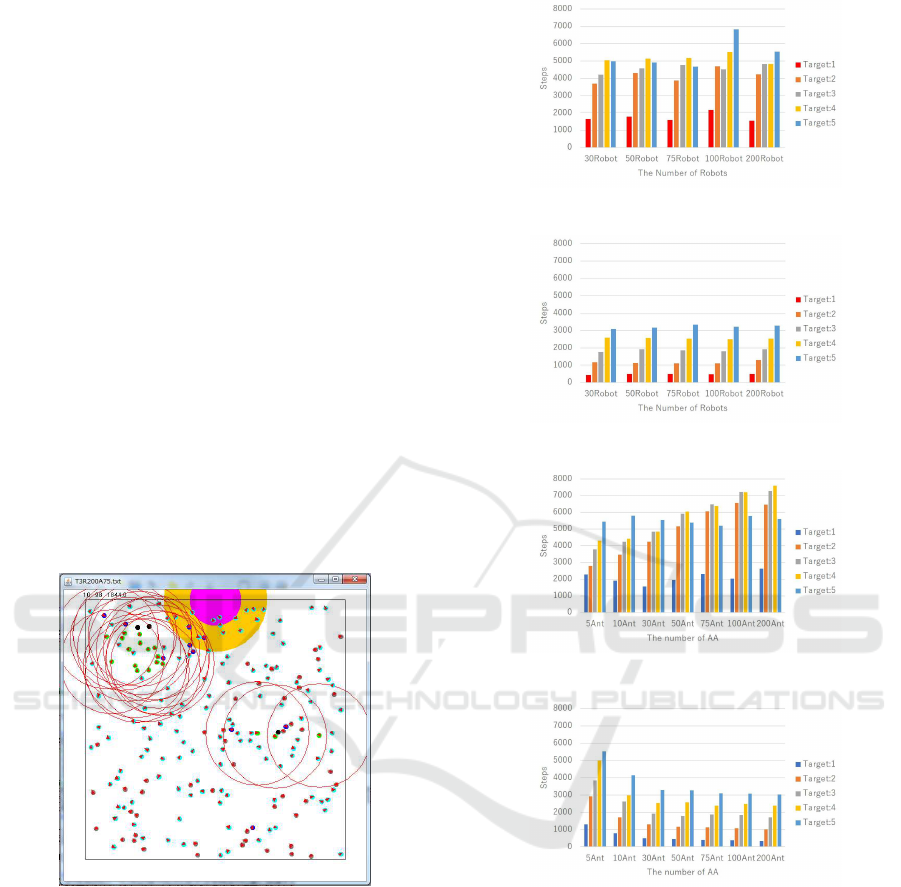
We have conducted 100 trails for each number of
AAs, robots and intruders, and measured the duration
time to drive intruders to the capture location. Figure
14 shows an image of simulation with 200 robots, 75
AAs and 3 intruders.
Figure 14: Experiment Example.
Figures 15 and 16 show the results for relation of
the efficiency between the number of robots and the
number of intruders in fixing the number of AAs to
30. The vertical axis represents the number of steps
needed to drive intruders, where each bar represents
the number of intruders driven into the capture loca-
tion. The horizontal axis is the number of participat-
ing robots. Figures 17 and 18 show the results for
the relation between the number of AAs and the num-
ber of intruders in fixing the number of robots to 200,
where horizontal axis represents the number of partic-
ipating AAs. Figures 15 and 17 show the results with
the previous method, and Figures 16 and 18 show the
results with our improved method.
Figure 15: Previous: The number of Steps with 30 AAs.
Figure 16: Improved: Steps with 30 AAs.
Figure 17: Previous: The number of Steps with 200 robots.
Figure 18: Improved: The number of Steps with 200 robots.
Comparing the two methods, the improved method
shows obvious advantage regardless of the number
of robots. The advantage becomes more remarkable
as the number of intruders decreases. Also we can
observe that the advantage become more remarkable
as the number of AAs increases. The result shows
that our improvement enhances the effectiveness of
the mobile agents in our system.
Figures 19 and 20 show the result for the relation
of the efficiency between the number of AAs and the
number of robots in fixing the number of intruders
to three. The vertical axis represents the number of
steps needed for driving the intruders into the capture
location, and horizontal axis is represents the num-
Capture of Multi Intruders by Cooperative Multiple Robots using Mobile Agents
375
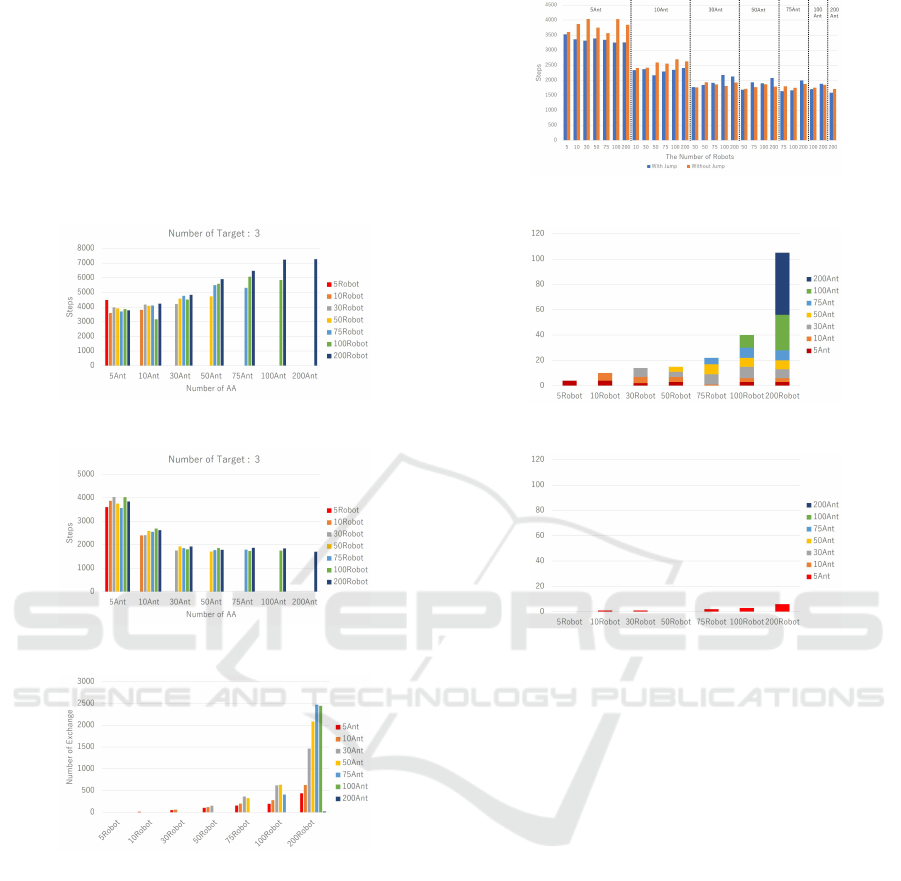
ber of participating mobile agents and each bar repre-
sents the number of robots. As shown in the figures,
our system becomes more efficient as the number of
AAs increases in improved method than in the pre-
vious method. As shown in Figure 21, the number
of AA exchanges increases dramatically as the num-
ber of robots increases. This phenomenon represents
exchanging agents contributes to the reduction of the
steps.
Figure 19: Previous: The number of Steps with 3 intruders.
Figure 20: Improved: The number of Steps with 3 intruders.
Figure 21: The number of Exchange with 3 intruders.
Figure 22 shows the efficiency of the AA’s “Jump” al-
gorithm. We can observe that the smaller the number
of AA is, the greater the advantage of jump behind of
the intruder is obtained. On the other hand, the ad-
vantage decreases as the number of AA increases.
Finally, we show the number of “miss” trails in
Figures 23 and 24. Our improved method especially
contributes to the achievement of capturing intruders
compared with previous method.
Figure 22: Left:with jump, Right:without jump.
Figure 23: Previous: The number of Miss with 3 intruders.
Figure 24: Improved: The number of Miss with 3 intruders.
6 CONCLUSIONS
We have proposed a method for chasing multiple in-
truders that is an improved version of our previous
method that chases a single intruder. We implemented
the algorithm for capturing intruders. Since human
intruders faster than robots, we have made the cap-
tor robots cooperate by using mobile agents. With the
full use of agent mobility in the cooperation, we have
successfully made mobile robots chasing intruders in
the behind them. This is achieved through changing
chasing robots by migration of driving mobile agents.
The chasing manner contributes to efficient capturing.
Also, our collision management based on migration
contributes to reduce failure of capturing intruders.
In order to show the feasibility of our idea, we
have implemented a simulator of our mobile robot
system and demonstrate the effectiveness. We are go-
ing to implement this intruder capturing system with
an actual mobile robots.
HAMT 2020 - Special Session on Human-centric Applications of Multi-agent Technologies
376

ACKNOWLEDGEMENTS
This work is partially supported by Japan Society for
Promotion of Science (JSPS), with the basic research
program (C) (No. 17K01304), Grant-in-Aid for Sci-
entific Research (KAKENHI) and Suzuki Founda-
tion.
REFERENCES
Dorigo, M. (2005). SWARM-BOT: an experiment in swarm
robotics. In 2005 IEEE Swarm Intelligence Sympo-
sium, SIS 2005, Pasadena, California, USA, June 8-
10, 2005, pages 192–200.
Dorigo, M., Maniezzo, V., and Colorni, A. (1996). Ant sys-
tem: optimization by a colony of cooperating agents.
IEEE Transactions on Systems, Man, and Cybernet-
ics, Part B (Cybernetics), 26(1):29–41.
Goss, S., Aron, S., Deneubourg, J. L., and Pasteels, J. M.
(1989). Self-organized shortcuts in the argentine ant.
Naturwissenschaften, 76(12):579–581.
Kambayashi, Y., Sekido, T., and Takimoto, M. (2020). Cap-
ture of intruders by cooperative multiple robots using
mobile agents. In the 3rd International Conference on
Intelligent Human Systems Integration. Springer. to
appears.
Kambayashi, Y., Yajima, H., Shyoji, T., Oikawa, R., and
Takimoto, M. (2019). Formation control of swarm
robots using mobile agents. Vietnam J. Computer Sci-
ence, 6(2):193–222.
Nagata, T., Takimoto, M., and Kambayashi, Y. (2013).
Cooperatively searching objects based on mobile
agents. Trans. Computational Collective Intelligence,
11:119–136.
Shintani, M., Lee, S., Takimoto, M., and Kambayashi, Y.
(2011). A serialization algorithm for mobile robots us-
ing mobile agents with distributed ant colony cluster-
ing. In Knowledge-Based and Intelligent Information
and Engineering Systems - 15th International Confer-
ence, KES 2011, Kaiserslautern, Germany, September
12-14, 2011, Proceedings, Part I, pages 260–270.
Song, C., Liu, L., and Xu, S. (2019). Circle formation con-
trol of mobile agents with limited interaction range.
IEEE Trans. Automat. Contr., 64(5):2115–2121.
Takahashi, R., Takimoto, M., and Kambayashi, Y. (2014).
Cooperatively transporting unknown objects using
mobile agents. In ICAART 2014 - Proceedings of the
6th International Conference on Agents and Artificial
Intelligence, Volume 2, ESEO, Angers, Loire Valley,
France, 6-8 March, 2014, pages 60–68.
Takimoto, M., Mizuno, M., Kurio, M., and Kambayashi, Y.
(2007). Saving energy consumption of multi-robots
using higher-order mobile agents. In Agent and Multi-
Agent Systems: Technologies and Applications, First
KES International Symposium, KES-AMSTA 2007,
Wroclaw, Poland, May 31- June 1, 2007, Proceedings,
pages 549–558.
Yang, H. and Wang, Y. (2019). Formation optimization
and control for maneuvering target tracking by mobile
sensing agents. IEEE Access, 7:32305–32314.
Capture of Multi Intruders by Cooperative Multiple Robots using Mobile Agents
377
