
A Lightweight Virtualisation Platform for Cooperative, Connected and
Automated Mobility
Fabian Gand, Ilenia Fronza, Nabil El Ioini, Hamid R. Barzegar, Van Thanh Le and Claus Pahl
Free University of Bozen-Bolzano, Bolzano, Italy
Keywords:
Digital Mobility, CCAM, Road Mobility, Edge Cloud, Container, Orchestration, Performance Engineering.
Abstract:
Digital mobility systems such as autonomous cars or traffic management build on connectivity and automated
cooperation. In order to facilitate various use cases such as vehicle manoeuvres, infotainment support or state
share functions, a distributed layered computation and communication infrastructure is needed that connects
vehicles and other devices through mobile networks, linking them to edge and cloud services. Of particular
relevance are lightweight clustered infrastructures close to the edge of the network that provide nonetheless
sufficient compute, storage and networking capabilities. Clusters consisting of single-board devices are used
in a variety of these use cases. In most cases, data that is accumulated on the devices has to be sent to
remote cloud hubs for processing. However, with the hardware capabilities of these controllers continuously
increasing, it is now possible to directly process data on these edge cluster. This concept is known as Edge
Computing. We propose an edge computing architecture for cooperative, connected and automated mobility
that relies on industry-standard technologies such as the MQTT protocol for communication, Prometheus for
monitoring and Docker swarm in conjunction with openFaas for deploying containerized services.
1 INTRODUCTION
Digital mobility systems such as autonomous cars or
traffic management build on connectivity and auto-
mated cooperation. In order to facilitate use cases
such as vehicle manoeuvres, infotainment support and
state share applications, a distributed layered com-
putation and communication platform is needed that
connects vehicles and other devices through mobile
networks, linking them to edge and cloud services.
We propose an architecture for cooperative, con-
nected and automated mobility (CCAM) that relies
on widely used technologies such as the MQTT pro-
tocol for communication, Prometheus for monitor-
ing and Docker swarm in conjunction with open-
Faas for deploying services across the cluster. We
demonstrate the proposed architecture by referring to
the functionality of the European Union-supported
5G-CARMEN project that aims at building a 5G-
enabled motorway corridor across 3 countries to
conduct cross-border trials of 5G technologies (5G-
CARMEN, 2019). Three areas that the project is fo-
cused on are vehicle manoeuvre negotiation, infotain-
ment and state sharing, which will also be addressed
here in the proposed architecture.
The 5G mobile standard aims at enabling com-
munication between devices almost in real time (5G-
CARMEN, 2019). In addition to higher transfer rates,
new technologies such as Network Function Virtual-
ization are supported allowing the execution of code
functions on generic hardware nodes without having
to install specific hardware. Software Defined Net-
working allows third parties to directly use hardware
resources by defining the desired set-up at software
level.
Clusters at the edge of the communication net-
work often consist of smaller (e.g., single-board) de-
vices and are used in a variety of these use cases. In
many configrations, data that is accumulated on the
devices has to be sent to remote cloud hubs for pro-
cessing. However, with the hardware capabilities of
these controllers continuously increasing, it is now
possible to directly process data on the cluster. This
concept is known as Edge Computing. Edge Com-
puting is defined as a concept where most process-
ing tasks are computed directly on hardware nodes
at the edge of a network or cluster and are not send
to remote processing hubs. The edge technologies
we deploy shall be based on the serverless concept.
Serverless aims at shifting the responsibility of de-
ploying, scaling and maintaining software to the re-
source provider. Instead of deploying and running the
Gand, F., Fronza, I., El Ioini, N., Barzegar, H., Le, V. and Pahl, C.
A Lightweight Virtualisation Platform for Cooperative, Connected and Automated Mobility.
DOI: 10.5220/0009379802110220
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 211-220
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
211

application on designated hardware themselves, de-
velopers simply need to hand it over to the serverless
platform (Baldini et al., 2017).
In order to demonstrate the suitability of our pro-
posed lightweight CCAM edge architecture built on
principles of microservices, containers, serverless and
auto-scaling, we implemented a proof-of-concept ver-
sion for experimental evaluation.
The paper is structured as follows. In Section 2, a
use case and architecture requirements are introduced.
In Section 3, related work is discussed. Section 4 first
reports on the high-level architecture of the proposed
platform before describing each component in detail.
Section 5 evaluates the architecture.
2 CCAM USE CASES
We target here a traffic management (TM) system for
autonomous cars as a use case for illustration that
needs to be deployed on hardware nodes in relatively
close proximity to the road sections it is supposed to
cover. The users of the system are: (a) Passive User:
Passengers of self-driving vehicles that make use of
the autonomous driving functionality, using the parts
involved in providing autonomous driving and addi-
tional functionality for vehicles such as video stream-
ing. (b) Active User: Administrators observing the
system status, using a dashboard function to gain an
overview over the system status. The system shall be
deployable on microcontrollers in the form of single-
board devices. The aim is to judge the computational
capabilities of constrained devices at the real edge
of the network. In our case the application will be
deployed and evaluated on Raspberry Pis, but other,
comparable devices, could also be supported. The
goal of this work is to identify components that are
suitable for the demands of a 5G mobility system. The
focus needs to be on the architectural and software re-
lated issues of such an implementation. Topics related
to the technical details of the 5G standard will not be
addressed. Please note that we focus on the outer edge
in terms of performance evaluation. More central and
larger so-called mobile or multi-access edge clouds
(MECs) are also needed, but will not be the focus here
in the experimental work.
A platform solution must provide a way to scale
and configure parts of the application in such a way
that changing external factors, such as the numbers of
active cars, are taken into consideration and the appli-
cation is configured and scaled accordingly. There-
fore, there needs to be a mechanism to rescale at run-
time. Another important aspect was to keep the used
storage space on the devices to a minimum.
We will consider a Cooperative, Connected and
Automated Mobility (CCAM) scenario, specifically
manoeuvering (e.g., lane changing) and in-car video
streaming of a mobile entertain service, as our mo-
tivating scenarios. Cars (and other vehicles) are be-
coming more and more connected. Even today, many
cars communicate status information to manufactur-
ers or other parties, or receive data for the navigation
system. Towards autonomous cars, even more com-
munication and coordination can be expected with
more data to be processed at higher speed. We illus-
trate this with the following two use cases:
• Our first use case deals with manoeuvering, for
which supported lane changing is a concrete ex-
ample. Cooperation between vehicles is needed
to ensure safe and efficient navigation through in
lane changing or overtaking. Vehicle automation
can help here. However, recognizing and com-
municating the intentions of traffic participants
with minimal delay is key to an optimized be-
haviour. To this end, wireless communication
systems can be used to exchange speeds, posi-
tions and intended trajectories/manoeuvres. The
on-board systems can use this information to de-
rive an optimized driving strategy (in case of
automated operation) or derive a recommended
course of action to actively optimize traffic flow
and avoid dangerous situations. Cooperative lane
changing can be realized either in localized or
centralized way. The former involves direct ex-
changes between vehicles, while the latter builds
upon a MEC/back-end server and a cellular net-
work, which support the vehicles in determining
optimal behaviour. Latency requirements require
the use of edge cloud technology to be used.
• Our second use case considers the on-demand
streaming of movies or live broadcasts into cars,
ideally in quality HD format. This application al-
ready dominates internet traffic today. More de-
mand can be anticipated with autonomous driv-
ing where drivers can then consume for instance
videos instead of being occupied with driving.
However, in a mobile context, the speed and la-
tency needed for high-quality HD video stream-
ing, irrespective of the location and network con-
ditions, is a challenge.
The overall architecture is shown in Fig. 1, showing
key management functions from core cluster manage-
ment and monitoring at MEC level (e.g., Kubernetes
for container clusters) to service orchestration includ-
ing placement, lifecycle and quality management.
To get a better understanding of the requirements,
we use the video streaming use case for a deeper anal-
ysis. We review the technical platform and technol-
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
212
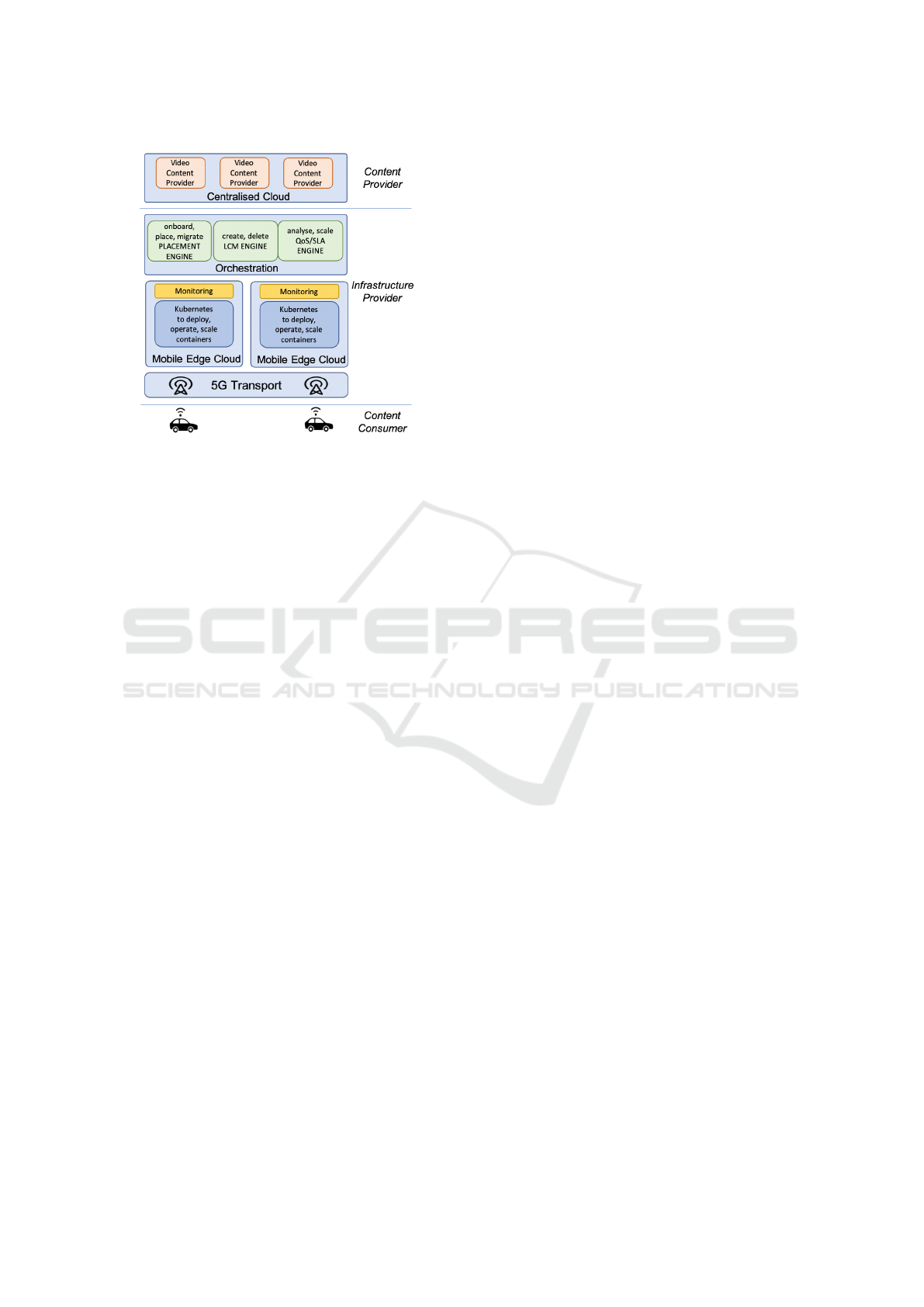
Figure 1: 5G-enabled Edge Architecture – for a Video
Streaming Service.
ogy requirements now, as in Figure 1. This applica-
tion context is characterised by different parties:
• Content consumer – consuming video in a vehicle,
• Content provider – delivers content, using video
servers in a cloud back-end,
• Infrastructure/QoS management entity – provides
the infrastructure and maintains QoE.
This needs to work in cross-operator and also in cross-
border environments. The video streaming applica-
tion has many sources of input, apart from the actual
video content. Many parameters need to be moni-
tored: the traffic on a road with the location/trajectory
of cars, but also the resource utilisation on edge and
core cloud resources (storage, compute, network), to
allow the right sections of video to be provided at
the right time into a moving vehicle that connects to
different network points. These resources are con-
sumed by the application function (streaming), but
are managed by an orchestrator (local mobile edge
cloud orchestrators and also central cloud orchestra-
tors) and a platform manager. Telecommunications
companies talk about Mobile (or Multi-access) Edge
Clouds (MECs) that bring cloud technology closer to
the edge of the network and the user.
The use cases of the EU H2020 project 5G-
CARMEN show the need to consider layered, 5G-
enabled edge architectures. For instance, in order
to provide video content into a moving car, informa-
tion is needed in order to predict the car trajectory
and buffer sufficient video content close-by in these
MECs to maintain quality. To solve this, we need to
employ prediction techniques and pro-active scaling
of platform and application services.
Prediction is a critical component in the dy-
namic processing, both for manoeuvering and video
use cases. The prediction of the car movement
or the future allocation of storage (video caching
needs) to bridge connectivity losses around borders
are challenges. Prediction needs to work with a
controller, which manages configuration settings for
video streaming functions in order to maintain non-
functional requirements (NFR) such as quality and
performance. An intelligent controller can deal with
orchestration and dynamic adaptation needs, for ex-
ample for the video streaming case to:
• Buffer more (if necessary allocate more storage
at suitable MEC). The size of the allocated re-
source is the control parameter: provide more
storage for buffering, if needed due to expected
outages/disconnections. The location of allo-
cated resources, i.e., storage at the most suitable
MEC/device in cross-border settings depending
on predicted trajectory, is another factor.
• Reduce video quality, e.g., reduce video frames
per second to deal with latency problems arising
from high data volumes being transferred.
Adaptation has an optimization goal. The resource
utilisation needs to be as low as possible, while still
maintaining NFRs (e.g., required latency or reliability
limits to maintain user Quality-of-Experience, with a
fixed message size).
The focus of our investigation is on the lower lay-
ers – from the edge to 5G infrastructure to roadside
devices (assuming small-board devices – SBD) and
cars (on-board units – OBU), see Fig. 2.
3 RELATED WORK
This chapter provides an overview over work that has
been conducted in the past regarding the elicitation of
requirements and the modeling of distributed IoT sys-
tems in the context of Edge Computing for CCAM.
(Kiss et al., 2018) gather requirements for applica-
tions making use of edge computing. Specifically in
the context of combining them with the capabilities
of the 5G standard. They mention that recently re-
leased single-board devices open up the possibility of
processing some of the data at the edge of the cluster.
There exist a variety of different examples of com-
parable IoT Systems that have been documented. We
consider here systems comprised of different hard-
ware nodes that communicate with each other as well
as with a central node. (Tata et al., 2017) outline the
state of the art as well as the challenges in model-
ing the application architecture of IoT Edge Applica-
tions. One of the scenarios they introduce is a system
A Lightweight Virtualisation Platform for Cooperative, Connected and Automated Mobility
213

Figure 2: 5G-CARMEN architecture.
for smart trains based on the principles of edge com-
puting. The system is comprised of a set of different
sensors attached to crucial components of a car. Data
is gathered by a central unit for each car that sends its
data to the central processing unit. The task of gath-
ering and processing data is delegated to edge nodes
of the network before passing it on to the cloud.
There exist already 5G-oriented platforms for
edge processing. An example is the lightMANO plat-
form (Riggio et al., 2018). This presents a MANO
standards-compliant implementation for lightweight
processing that allows NFV and SDN capabilities to
be supported. We build on similar idea, providing
here an experimental evaluation specifically consid-
ering lightweight device clusters.
4 CCAM ARCHITECTURE
In this section, we introduce important architecture
concepts as well as specific tools and technologies for
our platform. The final subsection describes how the
tools and technologies can be combined to create a
complete lightweight CCAM edge platform.
4.1 Architecture Concepts
Cloud Computing is based on data centers that are
able to process large amounts of data in the Cloud
(Kiss et al., 2018). Data from the local system is
usually sent to and processed by the cloud. This ap-
proach, however, leaves the potential local processing
power of the network unused and comes with signif-
icantly increased latency. Edge Computing leverages
the processing power of nodes at the edge of the lo-
cal network. These nodes are an intermediate layer
between the devices by processing parts of the data
within the local network that would otherwise by han-
dled by an external cloud.
Microservices have become increasingly popu-
lar in recent years. Traditional architectures usually
package and deploy software as a monolith: The en-
tire application was bundled into one executable that
was deployed on specific hardware. When switching
to a microservice architecture, the monolith is split
into different parts. These parts, the microservices,
run in an independent process and have their own de-
ployment artifacts (Jamshidi et al., 2018).
Serverless Computing is a new concept for the de-
ployment of cloud applications (Baldini et al., 2017).
The term serverless represents the idea that devel-
opers can focus on the application code without be-
ing concerned about the servers it is deployed on.
The tasks of managing and scaling the application are
handled by the resource provider. Usually, server-
less computing is accompanied by a concept called
Functions-as-a-Service (FaaS). Here, small chunks of
functionality are deployed and scaled dynamically by
the provider (Kritikos and Skrzypek, 2018). These
functions are usually even smaller than microservices.
They are short lived and have clear input and out-
put parameters, similarly to functions used in most
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
214
programming languages. If the component to be de-
ployed is more complex than a simple function and
is supposed to stay active for a longer period of time,
a stateless microservice should be considered (Ellis,
2018). Managing and deploying these microservices
is similar to serverless functions.
4.2 Tools and Technologies
The concrete hardware, software and standards used
in the platform are introduced here.
The Raspberry Pi is a single-board computer
based on an ARM-processor. The version 2 B models
used here include a 900MHz quad-core ARM Cortex-
A7 CPU and 1GB of RAM.
Docker is a containerization software. Container-
ization is a virtualization technology that, instead
of virtualizing hardware, separates processes from
each other by utilizing features of the Linux kernel
. Docker containers bundle an application with all of
its dependencies. Docker allows to create, build and
ship containers. Docker swarm is the cluster manage-
ment tool integrated into the Docker Engine. Instead
of running services and their corresponding contain-
ers on one host, they can be deployed on a cluster
of nodes that is managed like a single, Docker-based
system. By setting the desired number of replicas of
a service, scaling can also be handled by the swarm.
Hypriot OS is an operating system based on De-
bian that is tailored towards using Docker technol-
ogy on ARM devices such as the Raspberry Pi. The
OS comes prepackaged with Docker. MQTT is a net-
work protocol designed for the Internet of Things. It
is primarily used for unreliable networks with lim-
ited bandwidth. MQTT uses a publisher-subscriber
approach.
Figure 3: CCAM Architecture.
Prometheus is a monitoring tool that can be used
to gather and process application metrics. Contrary to
other monitoring tools it does not rely on the appli-
cation delivering the metrics to the monitoring tool.
Prometheus scrapes the metrics from a predetermined
interface in a given interval. This means that the met-
rics are expected to be exposed by the application.
OpenFaas is a Function-as-a-Service framework.
It can be deployed on top of Docker swarm or Kuber-
netes. When starting the openFaas framework a few
standard Docker containers are deployed. openFaas
contains a simple autoscaling rule that leverages the
default metrics aggregated by Prometheus and scales
based on predefined thresholds (openFaaS, 2019).
4.3 Combining Tools and Technologies
To meet the set requirements, tools and technologies
used to realize the platform need to provide a high
level of flexibility while managing the limited hard-
ware resources of the cluster. Combining the con-
cepts and technologies presented above are one way
of achieving this: by splitting the application into mi-
croservices and containerizing it, the hardware can
be reallocated dynamically. This also enables scal-
ing the different parts of the application in a simple
manner. The Docker images leave a minimal footprint
on the devices, making efficient use of the hardware.
MQTT, as a lightweight protocol, has a similar advan-
tage while its underlying publisher/subscriber pattern
simplifies communication in an environment where
services are added and removed constantly. Estab-
lishing peer-to-peer communication would be signif-
icantly more complex. OpenFaas is a simple way of
building and deploying services/functions across the
cluster. An overview of the different technologies in
the platform is provided in Figure 3.
5 ARCHITECTURE USE CASE
This section introduces a concrete use case for the
proposed architecture based on the 5G-CARMEN
project, i.e., an application, deployed on a cluster of
single-board devices, that is based on the concepts of
serverless computing and the microservices architec-
ture. Additionally, the system will support adaptive
auto-scaling of its components.
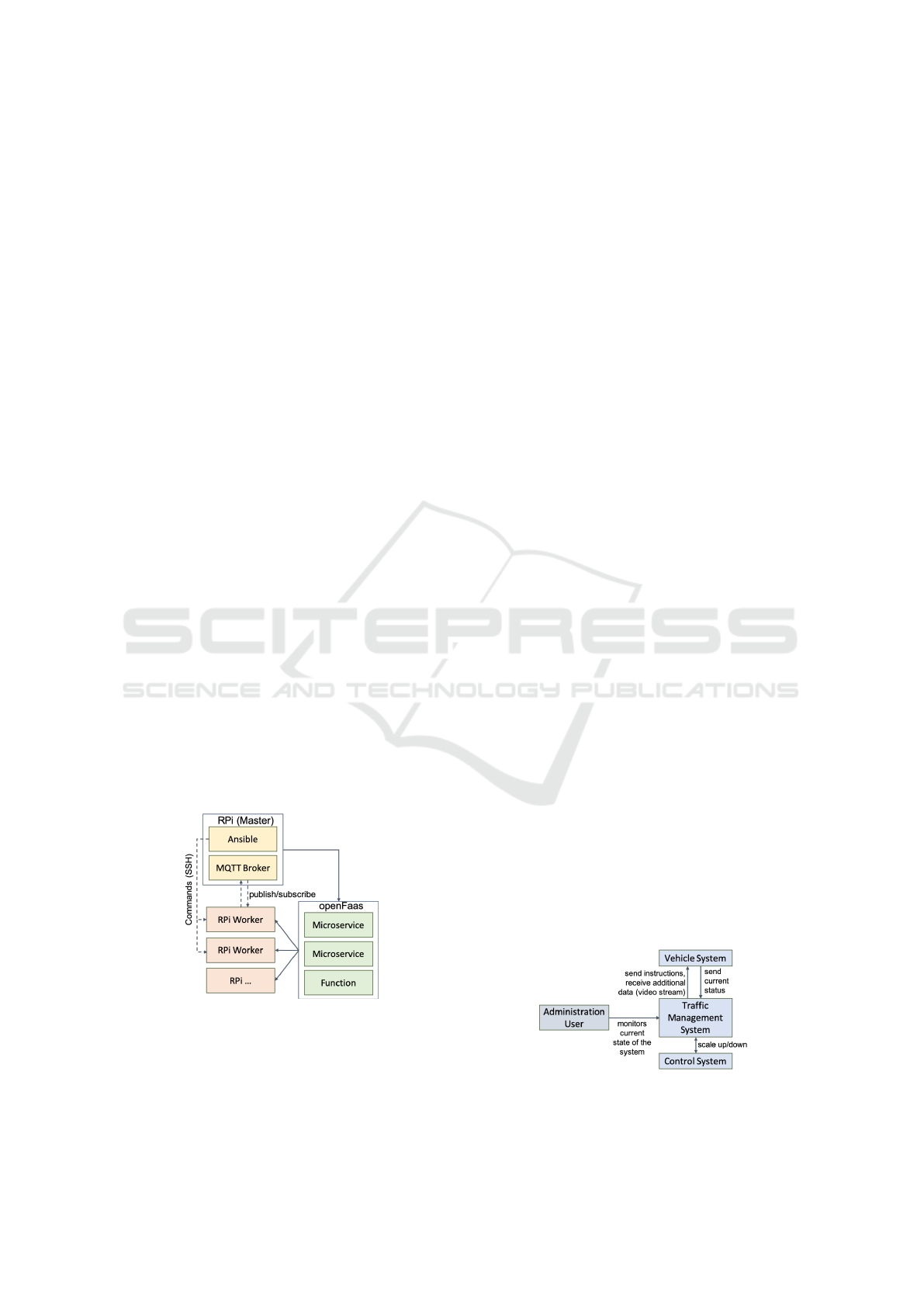
Figure 4: Interaction between systems.
The application is composed of three main layers.
A Lightweight Virtualisation Platform for Cooperative, Connected and Automated Mobility
215
The platform layer realizes the core architecture of the
cluster and the application. The system layer includes
the components of the system. On top of these two
layers, the controller layer scales the components of
the platform. Figure 4 shows the interaction between
system layer, controller layer and additional compo-
nents. The Traffic Management System (TMS) con-
tains all core components of the system. Adminis-
trators can access an interface to monitor its current
state. There is a constant exchange of messages be-
tween the TMS and the Vehicle System (VS) that con-
tains simulations of vehicles. The Control System
(CS) is used to scale parts of the TMS based on the
current situation and a number of predefined factors.
5.1 Platform
The platform is deployed on a cluster managed by
Docker Swarm. The cluster includes one master node
and an arbitrary number of worker nodes. Ansible is
used to execute commands on all nodes without hav-
ing to connect to each node individually. All nodes
are able to connect to the MQTT broker that is run-
ning on the master device after startup. Avahi allows
all nodes to establish a connection to the master by
addressing it by its hostname. Using Docker swarm
and openFaas, the RPIs are connected in such a way
that they can be seen as one system. If a service is
supposed to be deployed, openFaas will distribute it
among the available nodes. There is no need to spec-
ify the specific node as this abstraction layer is hidden
behind openFaas. OpenFaas is also utilized to scale
the services independently. Communication between
the services is achieved by relying on the openFaas
gateway as well as on the MQTT broker.
The cluster is comprised of eight Raspberry Pi 2
Model B connected to a mobile switch via 10/100
Mbit/s Ethernet that is powering the RPIs via PoE
(Power over Ethernet) (Scolati et al., 2019). All nodes
of the cluster run Hypriot OS.
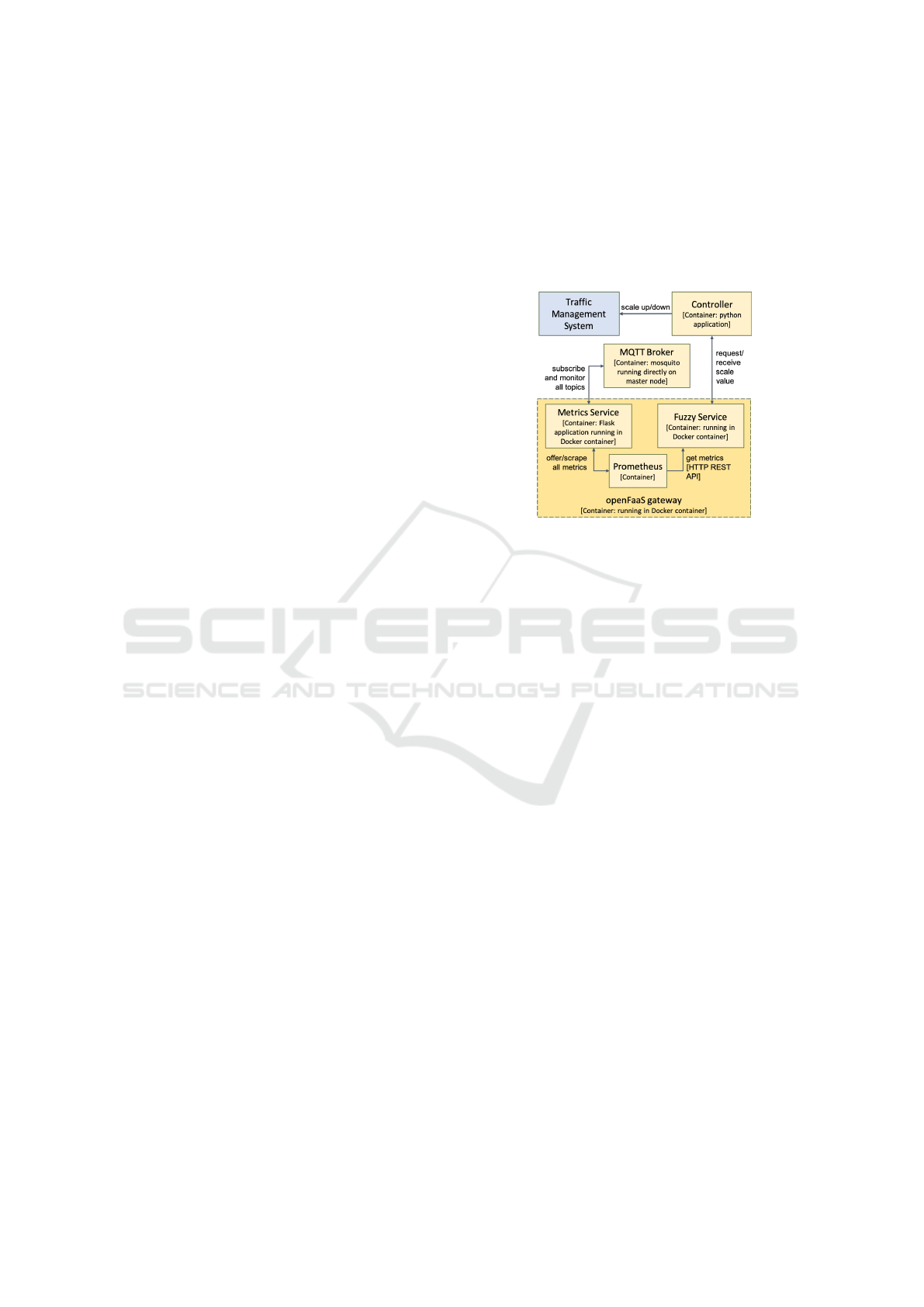
5.2 Traffic Management System
The platform in its current state serves as a functional,
concrete proof-of-concept of a Traffic Management
System. Figure 5 visualizes the interaction between
the most important services of the system. The Vehi-
cle System VS is used to simulate vehicles. The vehi-
cles continuously publish their current position and
status to the MQTT Broker. The gatherer receives
these messages and passes them on to the decision-
function, which is an openFaas function that calcu-
lates a corresponding command (slow down, acceler-
ate, keep current speed) for each message. The gath-
erer relays these commands back to the vehicle via the
MQTT Broker. In addition, a video service provides a
video stream to be consumed by the vehicles and the
dashboard service enables administrators to access a
web-interface that provides an overview of the sys-
tem. All of the aforementioned services are deployed
and managed via the openFaas gateway.
Figure 5: Traffic Management System.
5.3 Communication
The system uses the mosquito MQTT broker to estab-
lish a communication bus between systems and ser-
vices. The messages are based on the JSON data ex-
change format. The first advantage of using MQTT is
the minimized network latency (Light, 2018), which
is crucial for CCAM use cases. Additionally, not all
services may be accessible from all other services
within the cluster. Therefore, having only a single
central master node, running the mosquito broker, that
needs to be accessible from any other part of the sys-
tem, saves a significant amount of additional config-
uration work. Making use of the publisher/subscriber
pattern is another advantage since messages may need
to be addressed to more than one service at a time.
Hence, MQTT greatly reduces configuration efforts
and network latency.
5.4 Vehicle System
The vehicle system VS provides a service simulat-
ing here in the experimental set-up a vehicle on the
road section that is to be monitored. The VS may
contain an arbitrary number of vehicle services. The
service randomly creates a vehicle and continuously
publishes MQTT messages to the broker. The mes-
sages contain JSON objects that include the follow-
ing fields: the current speed of the vehicle, the lane
of the vehicle, the license plate number, the vehi-
cle type (manually driven vehicle, an autopiloted car,
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
216

a convoy truck), the UUID of the vehicle, the alti-
tude and whether the vehicle supports video stream-
ing. The vehicle service subscribes to a specific com-
mands topic that is defined as "commands/" followed
by the UUID of the vehicle. Once it receives a com-
mand on this topic, the vehicle updates its speed ac-
cording to the command.
5.5 Traffic Management Components
The gathering service receives information about the
current location of the vehicles. The gatherer holds a
four-dimensional array of length 1000 that represents
the part of the road that is to be monitored. Arrays
0 and 1 are two lanes leading south, while array 2
and 3 are the lanes leading north. It will update the
road array with the current location of each vehicle,
thus creating an actual representation of the road at
a given point in time. Once a vehicle has left the
area that is covered, the gatherer will delete the last
location of that vehicle. The gatherer also passes spe-
cific messages to each vehicle. However, it does not
include the logic for choosing a command for a spe-
cific car in a specific situation. Instead, it relays this
information along with the current road-array to the
decision-function that will decide what command is
to be executed. The returned command will then be
published by the gatherer. The decision-making logic
is a built-in component of the gathering service.
Figure 6: Sequence diagram showing the interaction be-
tween the gatherer and the vehicle instances.
The video service provides video streaming func-
tionality. The implementation implements a stream-
ing application using flask. Using this approach, in-
dependent jpeg images can be streamed continuously
on a specific route. The video service was imple-
mented as an openFaas stateless microservice. This
way, video streaming data can be served from dif-
ferent instances of the video service by accessing the
stream via the gateway.
The decision function receives the current road-
array and information about the current location of a
vehicle and uses this information to pick a suitable ac-
tion that is to be taken by that vehicle. In its current
configuration, it aims at maintaining a minimum dis-
tance of four blocks (elements of the array) between
vehicles. Should the vehicle at the back get to close to
the vehicle in front, the command slows it down until
the desired distance is reached. If the distance is suf-
ficient and the car has not reached the advised speed
for this section of the road, the command will instruct
the vehicle to accelerate.
The dashboard function provides an overview
over the MQTT messages that are passing through the
broker. It shows the configuration messages, issued
commands as well as information for every active ve-
hicle. The dashboard is based on an open-source,
MIT licensed project that contains sample code for
a simple MQTT web-dashboard.
The config function is used to automatically set
the configuration of certain system-wide parameters.
The function takes a JSON object as a parameter that
contains values such as the hostname of the MQTT
broker or topic definitions. The config function pub-
lishes this object to a certain topic and flag it as a mes-
sage to be retained. On startup, all concerned services
will subscribe to this configuration topic and immedi-
ately receive the last retained message. The received
global values are used to update the internal variables
of the respective services.
5.6 Monitoring
Monitoring uses the openFaas Prometheus instance.
The metrics service is used to acquire metrics
about the system by serving as a central hub that ac-
cumulates all cluster-wide metrics and by publishing
those metrics via a flask HTTP endpoint. This end-
point is the central interface for Prometheus to scrape
from. The prometheus python API is used to im-
plement the metrics. The metrics service currently
exposes the number of messages, the number of ac-
tive cars as well as the cumulative memory and CPU
usage. The number of messages is implemented as
a counter that continuously increases. CPU/memory
usage, on the other hand, is realized by using a gauge,
which can be a set to an arbitrary number.
The Prometheus instance is used to store metrics
and query them when needed. Prometheus provides
a rest API along with a language called PromQL to
aggregate and query metrics. The aggregated data is
returned in the JSON format.
Before startup, Prometheus needs to be informed
about the endpoints that metrics should be scraped
from. The Prometheus instance that is shipped with
openFaas only scrapes metrics from the openFaas
gateway since only metrics related to function exe-
cution are being monitored by default.
A Lightweight Virtualisation Platform for Cooperative, Connected and Automated Mobility
217
6 EVALUATION
Now, the proposed architecture shall be evaluated.
The focus lies on evaluating the performance of the
proposed serverless microservice solution and the
auto-scaling approach in the context of the CCAM
non-functional requirements. To give this a concrete
perspective, we also evaluated the maximum number
of vehicles the cluster architecture (including the net-
work it was operated in) could support for the use
cases in a given road section.
6.1 Requirements, Metrics, Setup
We start discussing at a high level the non-functional
CCAM requirements and how we addressed them.
Safety: Downtime during reconfiguration and slow-
downs caused by high load are avoided by using
fuzzy-adaptive scaling. Performance: The scaling
algorithm is based on Service-Level-Objectives that
maintain performance needs. Reconfigurability: The
application is split into different containerised ser-
vices that can be easily deployed across the cluster
from a central node. Physical access to individual
nodes is not necessary. Scalability: The system is re-
configured on the fly by using the auto-scaling func-
tionality based on adaptive fuzzy scaling for server-
less containers. Dependability: Several gatherer ser-
vices are usually deployed at the same time. If a gath-
erer is added or removed the vehicles are automati-
cally distributed among the available gatherers, pro-
viding better reliability and availability. The scaling
functionality ensures that the performance remains
above a certain SLO. Interoperability: The applica-
tion may be deployed on different hardware nodes.
Docker containers decouple the application from the
actual hardware layer and the host OS. The only tech-
nical requirement is the availability of Docker. In the
following, dependability, scalability and and perfor-
mance will be addressed in detail.
These objectives were evaluated for two different
cluster set-ups. In order to obtain a first understanding
of the system and the possible range of variables, a
first calibration pilot was conducted on a small cluster
of only three devices. Then, the evaluation procedure
was repeated for a complete cluster of eight devices.
All evaluation steps report on a number of perfor-
mance metrics that indicate the effectiveness of the
system or provide insight into an internal process.
The Message Roundtrip Time (MRT) is the central
variable of the system that reports on the effectiveness
of the autonomous driving functionality. Included in
the MRT is the openFaas-supported Function Invoca-
tion Time (FIT) that is listed separately in order to in-
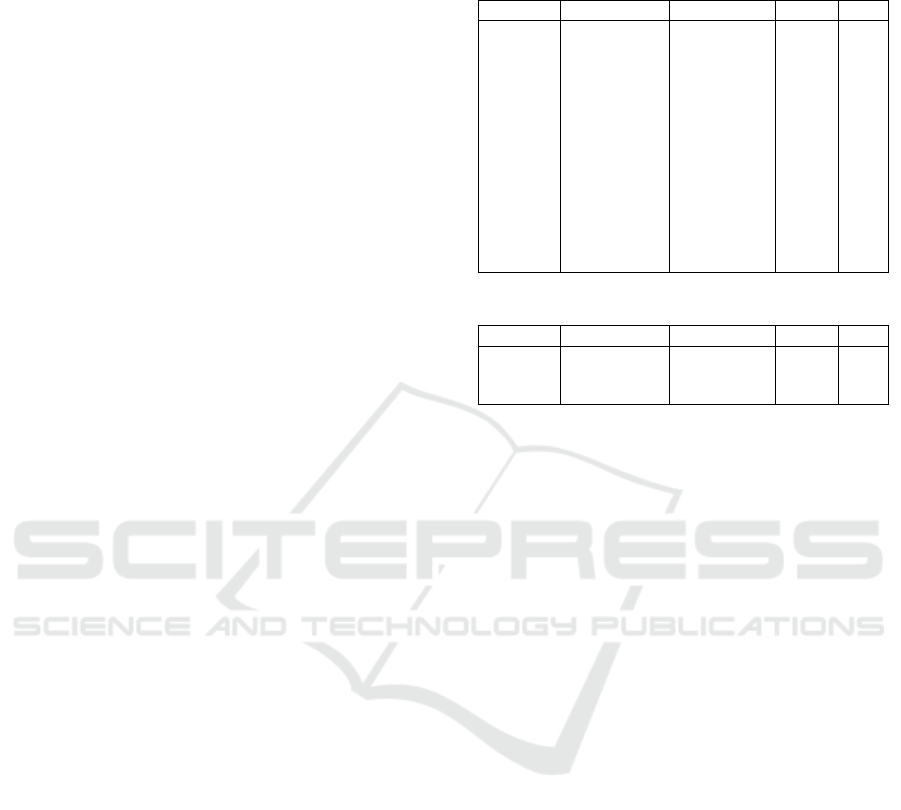
Table 1: Results for a cluster of eight RPIs using the full
version of the system. The FIT was not measured since the
decision-function was removed here.
Vehicles Mem Usage CPU Usage MRT FIT
2 2.92 36.53 0.02 -
4 3.29 37.02 0.025 -
6 3.89 37.90 0.029 -
8 5.48 38.41 0.028 -
10 5.81 39.37 0.17 -
12 5.17 39.78 0.028 -
14 6.98 40.07 0.028 -
16 4.2 40.33 0.025 -
18 4.5 40.67 0.025 -
20 4.94 41.1 0.027 -
22 5.19 41.43 0.028 -
24 5.74 41.7 0.027 -
26 5.99 42.14 0.028 -
Table 2: Setup as in Table 1 with higher vehicle numbers.
Vehicles Mem Usage CPU Usage MRT FIT
50 8.63 46.75 0.03 -
75 11.79 51.7 0.032 -
100 14.48 56.57 0.04 -
dividually report on the serverless performance. In
this evaluation, all MRT and FIT values are consid-
ered average values aggregated over the last 20 sec-
onds after the previous scaling operation was com-
pleted. For our use case, the maximum scale value
was unknow, but could generally be specified before-
hand. Over the course of this evaluation, different
MRT thresholds are applied. For all set-ups and itera-
tions that were evaluated, the hardware workload was
measured by computing the average CPU and mem-
ory usage over all nodes of the cluster, combining it
into a single value. This is feasible since the entire
cluster can be seen as one system by combining the
individual nodes using Docker swarm and openFaas.
An initial calibration pilot was conducted to ob-
tain an initial idea of the system’s capabilities and
adjust the manually-tuned parameters accordingly. It
was also used to evaluate whether the scaling func-
tionality yields promising results before putting it to
use in a bigger set-up. The evaluation was started with
a cluster consisting of three RPIs: a master and two
worker nodes. The maximum scale value was initially
set to 5 in order to avoid scaling the system to inade-
quate (overly resource-demanding) configurations.
6.2 Evaluation of the Complete System
A cluster of eight RPIs was used. The decision-
making functionality is included in the gatherer ser-
vice, which can be scaled independently. This avoids
the need to call the decision function for each mes-
sage. The results can be found in Tables 1 and 2. Val-
ues of a sample run can be found in Table 3.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
218
Table 3: Sample scaling for a cluster of eight RPIs. Man-
ually set variables: Maximum Scale Value: 12, Number of
cars: changing, MRT Threshold: 0.3 seconds.
Iteration # cars Fuzzy
Scale
Value
MRT after
scaling
Adjustment
Factor
1 25 4.77 Initial 0.0
2 25 6.94 0.03 2.58
3 25 7.79 0.04 0.0
4 25 8.80 0.03 -2.58
5 50 10.11 0.178 -7.74
6 50 10.82 0.44 -10.32
7 50 10.82 0.44 -10.32
8 75 11.06 0.09 -12.9
9 75 11.24 0.033 -18.06
10 75 11.3 3.95 -20.64
11 75 11.34 0.07 -23.22
Considering the results in Tables 1 and 2, adequate
MRT values can be noted. We recorded values for
different numbers of vehicles. The MRT values ap-
pear to be growing exponentially. Between 16 and
24 vehicles, the MRT only increases by about 8%. If
we look at the CPU usage, we can again see suitable
values, here it consumes about 8-10% more of CPU
with a bundled and separately scaled gatherer. The ad-
ditional computing power and time that is needed to
make a decision internally is neglectable when com-
pared to the significant overall MRT advantage.
The system accommodates around 75 vehicles.
The bottleneck appears to be the network: when try-
ing to increase the number of vehicles beyond this
point, the network was unable to handle the amount
of messages that were exchanged, which resulted in
connections and packets being dropped continuously.
6.3 Evaluation Summary
Containerization comes with a small performance
loss compared to traditional set-ups. However, the
advantages are generally more significant than the
downsides. The evaluation indicates that serverless
function calls should be restricted since they intro-
duce network latency problems. Refactoring the pro-
posed solution to reduce the number of necessary
calls to openFaas functions resulted in a significant
increase in performance. The implemented scaling
algorithm works as intended. Based on give service-
level objectives, the only values that need to be set
manually are the maximum scale value and the ad-
justment factor. The limiting factor appears to be the
network. Our configuration was not able to process
more than 75 vehicles at a time. CPU and memory
usage numbers as well as the steady, but slow increase
of the MRT imply that the hardware itself should be
able process a higher number of vehicles. The archi-
tecture thus yields satisfying results in terms of hard-
ware consumption and performance (MRT).
7 CONCLUSIONS
We introduced a containerized traffic management ar-
chitecture for the CCAM context deployable on a
cluster of edge devices. The applied approach results
in a reconfigurable, scalable and dependable system
that provides built-in solutions for common problems
such as service discovery and inter-service communi-
cation. An implementation of a proof-of-concept has
experimentally demonstrated the suitability.
The evaluation also showed that the given
lightweight and constrained set-up is only able to pro-
cess up to 75 vehicles simultaneously in common data
streaming and coordination activities. The bottleneck
that prevents the system from scaling even higher ap-
pears to be the network infrastructure as well as the
limited internal networking capabilities of the RPI.
This shall be addressed in a future extension.
Implemeting full security and a trust environment
is part of future work (El Ioini et al., 2018; El Ioini et
al., 2018a). For instance, the communication between
the services using the openFaas gateway could be en-
crypted using TLS. The MQTT connections can be
secured. Most MQTT brokers, including mosquitto,
also support TLS for securing the communication
channels.
ACKNOWLEDGEMENTS
This work has received funding from the EU’s Hori-
zon 2020 research and innovation programme under
grant agreement 825012 - Project 5G-CARMEN.
REFERENCES
5G-CARMEN (2019). 5G-CARMEN - 5G for Con-
nected and Automated Road Mobility in the European
UnioN. https://www.5gcarmen.eu/. Accessed: 2019-
11-10.
Baldini, I., Castro, P. C., Chang, K. S., Cheng, P., Fink, S. J.,
Ishakian, V., Mitchell, N., Muthusamy, V., Rabbah,
R. M., Slominski, A., and Suter, P. (2017). Serverless
computing: Current trends and open problems. CoRR,
abs/1706.03178.
Ellis, A. (2018). Introducing stateless microser-
vices for openfaas. https://www.openfaas.com/blog/
stateless-microservices/.
Fang, D., Liu, X., Romdhani, I., Jamshidi, P. and Pahl, C.
(2016). An agility-oriented and fuzziness-embedded
A Lightweight Virtualisation Platform for Cooperative, Connected and Automated Mobility
219

semantic model for collaborative cloud service search,
retrieval and recommendation. In Future Generation
Computer Systems, 56, 11-26.
Fowley, F., Pahl, C., Jamshidi, P., Fang, D. and Liu, X.
(2018). A classification and comparison framework
for cloud service brokerage architectures. IEEE Trans-
actions on Cloud Computing 6 (2), 358-371.
Gand, F., Fronza, I., El Ioini, N., Barzegar, H. R., Azimi,
S. and Pahl, C. (2020). A Fuzzy Controller for Self-
Adaptive Lightweight Edge Container Orchestration.
In International Conference on Cloud Computing and
Services Science CLOSER.
Gand, F., Fronza, I., El Ioini, N., Barzegar, H. R. and Pahl,
C. (2020). Serverless Container Cluster Management
for Lightweight Edge Clouds. In International Con-
ference on Cloud Computing and Services Science
CLOSER.
El Ioini, N. and Pahl, C. (2018). A review of distributed
ledger technologies. OTM Confederated International
Conferences.
El Ioini, N. and Pahl, C. (2018). Trustworthy Orchestration
of Container Based Edge Computing Using Permis-
sioned Blockchain. Intl Conf on Internet of Things:
Systems, Management and Security (IoTSMS).
El Ioini, N., Pahl, C. and Helmer, S. (2018). A decision
framework for blockchain platforms for IoT and edge
computing. IoTBDS’18.
Jamshidi, P., Pahl, C., Mendonca, N. C., Lewis, J., and
Tilkov, S. (2018). Microservices: The journey so far
and challenges ahead. IEEE Software, 35(3):24–35.
Jamshidi, P., Pahl, C., Chinenyeze, S. and Liu, X. (2015).
Cloud Migration Patterns: A Multi-cloud Service Ar-
chitecture Perspective. In Service-Oriented Comput-
ing - ICSOC 2014 Workshops. 6–19.
Jamshidi, P., Sharifloo, A., Pahl, C., Arabnejad, H., Met-
zger, A. and Estrada, G. (2016). Fuzzy self-learning
controllers for elasticity management in dynamic
cloud architectures. Intl Conf Quality of Software Ar-
chitectures, 70–79.
Jamshidi, P., Pahl, C. and Mendonca, N. C. (2016). Man-
aging uncertainty in autonomic cloud elasticity con-
trollers. IEEE Cloud Computing, 50-60.
Jamshidi, P., Pahl, C. and Mendonca, N. C. (2017). Pattern-
based multi-cloud architecture migration. Software:
Practice and Experience 47 (9), 1159-1184.
Kiss, P., Reale, A., Ferrari, C. J., and Istenes, Z. (2018).
Deployment of iot applications on 5g edge. In 2018
Intl Conf on Future IoT Technologies, pp. 1–9.
Kritikos, K. and Skrzypek, P. (2018). A review of serverless
frameworks. In 2018 Intl Conf on Utility and Cloud
Computing (Companion), pp. 161–168.
Lama, P. and Zhou, X. (2010). Autonomic provisioning
with self-adaptive neural fuzzy control for end-to-end
delay guarantee. In 2010 Intl Symp on Mod, Anal and
Sim of Comp and Teleco Syst, pp. 151–160.
Le, V. T., Pahl, C. and El Ioini, N. (2019). Blockchain Based
Service Continuity in Mobile Edge Computing. In 6th
International Conference on Internet of Things: Sys-
tems, Management and Security.
Light, R. (2018). Mqtt man page. https://mosquitto.org/
man/mqtt-7.html. Accessed: 2019-11-12.
Mendonca, N. C., Jamshidi, P., Garlan, D. and Pahl, C.
(2020). Developing Self-Adaptive Microservice Sys-
tems: Challenges and Directions. In IEEE Software.
openFaaS (2019). openfaas: Auto-scaling. https://docs.
openfaas.com/architecture/autoscaling/. Accessed:
2019-11-11.
Pahl, C., El Ioini, N., Helmer, S. and Lee, B. (2018). An ar-
chitecture pattern for trusted orchestration in IoT edge
clouds. Intl Conf Fog and Mobile Edge Computing.
Pahl, C., Jamshidi, P. and Zimmermann, O. (2018). Archi-
tectural principles for cloud software. ACM Transac-
tions on Internet Technology (TOIT) 18 (2), 17.
Pahl, C. (2003). An ontology for software component
matching. International Conference on Fundamental
Approaches to Software Engineering, 6-21.
Pahl, C. (2005). Layered ontological modelling for web
service-oriented model-driven architecture. In Europ
Conf on Model Driven Architecture – Foundations and
Applications.
Riggio, R., Khan, S. N., Subramanya, T., Yahia, I. G. B.,
and Lopez, D. (2018). Lightmano: Converging nfv
and sdn at the edges of the network. In 2018 Network
Operations and Management Symp, pp. 1–9.
Pahl, C., Jamshidi, P. and Zimmermann, O. (2020). Mi-
croservices and Containers. Software Engineering
(2020).
Pahl, C., Fronza, I., El Ioini, N. and Barzegar, H. R. (2019).
A Review of Architectural Principles and Patterns for
Distributed Mobile Information Systems. In 14th Intl
Conf on Web Information Systems and Technologies.
Scolati, R., Fronza, I., Ioini, N. E., Samir, A., and Pahl,
C. (2019). A containerized big data streaming archi-
tecture for edge cloud computing on clustered single-
board devices. In 9th International Conference on
Cloud Computing and Services Science CLOSER.
Tata, S., Jain, R., Ludwig, H., and Gopisetty, S. (2017).
Living in the cloud or on the edge: Opportunities and
challenges of iot application architecture. In 2017 Intl
Conf on Services Computing, pp. 220–224.
von Leon, D., Miori, L., Sanin, J., El Ioini, N., Helmer, S.
and Pahl, C. (2019). A Lightweight Container Mid-
dleware for Edge Cloud Architectures. Fog and Edge
Computing: Principles and Paradigms, 145-170.
Xi, B., Xia, C. H., Liu, Z., Zhang, L., and Raghavachari, M.
(2004). A smart hill-climbing algorithm for applica-
tion server configuration. In 13th Int. Conf. on WWW.
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
220
