
A User Independent Method for Identifying
Hand Gestures with
sEMG
Hitoshi Tamura
a
, Kazuki Itou and Yasushi Kambayashi
Department of Robotics, Nippon Institute of Technology, Saitama, Japan
Keywords: Semg, Hand Gesture, Deep Learning, LSTM, Data Augmentation.
Abstract: We propose a method to determine hand gestures using sEMG (surface Electromyogram) measured from the
forearm. The detection method uses the LSTM (Long Short Term Memory) model of RNN (Recurrent Neural
Network). Although the conventional method requires the learning data of the user, this is a method that an
unspecified number of users can use immediately by enhancing the data. We have confirmed that the accuracy
does not change even if the mounting position of the sensor is shifted. We have shown the effectiveness of
the data enhancement by numerical experiments.
1 INTRODUCTION
People use hand gestures as a means of
communication. Even though we use speech and
facial expressions as the main means of
communication, we use hand gestures as part of
natural body language. In addition, we have
organized the hand gestures as sign language and
have been using it for conversation. Therefore, it is
natural to think that we may employ the hand gestures
as an interface to electronic devices and robots. In
order to have a machine recognize hand gestures, we
generally use two means. One is a method of using
computer vision technique. That is recognizing a
hand shape and its operation using imaging devices
such as cameras and depth sensors.
The other method is to acquire the shapes of the
fingers and three-dimensional acceleration through
sensors. In order to do so, we need to attach sensors
to the fingers. In the former, external sensors such as
cameras and depth sensors are required, and
restrictions such as shooting range and effective
distance are often imposed on the position of the
sensor. In the latter, the human movements are
restricted. In addition, the users have to endure from
wearing such devices. Both methods need to be
adjusted according to the shooting environment and
the individual when using them.
Many researchers have proposed variations of
both methods. They are called classical methods, and
are summarized in the reference (Mitra and Acharya,
a
https://orcid.org/0000-0002-7836-3042
2007). Information obtained from sensors and
cameras is used to classify gestures. We can utilize
various classification methods such as HMM (Hidden
Markov Model), FSM (Finite State Machine) and
PCA (Principal Component Analysis).
Recently, we have witnessed a remarkable
development of machine learning methods. Since the
machine learning methods have dramatically
improved the performance of the classifiers, many
identification problems have been solved. Especially,
many researchers have made neural networks
perform machine-learning through the measured
sEMG (surface Electromyogram) of forearms to
identify hand gestures
In this paper, we propose a method that identifies
hand gestures by classifying sEMG obtained from
forearms using commercially available sensors and
deep learning method. The sensors used are Myo
Gesture Control Armbands (hereinafter Myo)
manufactured by Talmic Labs (now North). They are
easy to attach and detach. We made eight sEMG
sensors connected like a bracelet so that they are
easily detachable from the forearm (Figure 1). The
signals acquired from the eight sEMG are transmitted
to a control device, i.e. a PC via the Bluetooth
connection. Each sensor equips one 3-axis
accelerometer and one 3-axis gyroscope. The weight
of this sensor is 93g and the thickness is 11 mm.
Therefore we can expect the users to feal little
discomfort when they wear. Myo is suitable for direct
operation in VR and AR.
Tamura, H., Itou, K. and Kambayashi, Y.
A User Independent Method for Identifying Hand Gestures with sEMG.
DOI: 10.5220/0009370103550362
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 1, pages 355-362
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
355

Figure 1: Myo Gesture Control Armband.
By using such simple sensors, we do not need to
install cameras, which are required in conventional
methods, nor attaching devices to fingers such as data
globes, which require wire connections and
adjustments. Furthermore, since mounting sEMG
devices imposes little discomfort to the users, we can
provide more natural interfaces.
For hand gesture analysis, several conventional
machine learning methods have been proposed for
learning sEMG. They are methods using decision
trees and HMM for sign language recognition (Zhang
et al., 2011), methods using decision trees and k-NN
(k-Nearest Neighbor) for hand gesture analysis (Lian
et al., 2017), methods using PCA for prosthetic
control (Matrone et al., 2011), methods using HMM
and SVM (Support Vector Machine) (Rossi et al.,
2015), and methods using an application of ANN
(Artificial Neural Network) to hand gesture analysis
(Liu et al., 2017).
The methods of classifying the pattern of sEMG
by machine learning are roughly divided into two
categories: one is dealing with static gestures and the
other is that of including dynamic gestures. For
dealing with only static gestures, it is sufficient to
analyze a few snapshots for some moments of sEMG.
In order to analyze general dynamic gestures,
however, it is necessary to obtain time series gesture
data.
In order to classify time series data of sEMG for
dynamic hand gestures, we use RNN (recurrent
neural network). RNN is suitable for time series data.
One particular RNN is especially suitable for time
series data. That is LSTM (long short term memory)
model. It is an extended version of RNN.
The idea of analyzing sEMG by RNN is not new.
It has been employed in the field of biomedical
engineering and robotics since 1990’s. It has been
used to estimate the angles of joints in a human body
from sEMG, and to calculate motor control
parameters that control robots, electric prosthetic feet,
power assist suits (Koike et al., 1993; Koike et al.,
1994; Koike et al., 1995; Cheron et al., 1996; Cheron
et al., 2003).
Applying LSTM to sEMG time series data to
classify gestures are found in (Wu et al., 2018;
Samadani et al., 2018; Quivira et al., 2018).
According to those experiments, LSTM improves the
accuracy of the classification.
The problem is that when using a simple sEMG
sensor such as Myo to identify the hand gesture, a
slight deviation of attaching the device greatly affects
the acquired values of sEMG. It is difficult to measure
the complex movement of the forearm muscles that
are complex three-dimensional shapes with a sensor
that can measure only the muscle potential of the
body surface. Conventionally, this problem is
avoided by providing a large amount of data for
machine-leaning. However, this method requires a
large amount of data for each user, and the learned
classifier is effective only for that particular user. It is
difficult to make classifiers ready for unspecified
number of users.
There are many proposals to classify sEMG by a
classifier that is built by machine learning. However,
most of them are tailored for a specific user. Because
they are built from the user's own learning data. A
user has to provide a large amount of his or her own
data for the machine learning. There is no known
attempt of trying to build a learned classifier for
unspecified number of users.
In this paper, we report our attempt to develop a
hand gesture classifier that can be applied to an
unspecified number of people by effectively
augmenting several sEMG data.
2 TARAGET GESTURES AND
DETERMINATION METHODS
2.1 Types of Target Gestures
Figure 2 shows the target gestures. We classified six
types of gestures (weakness, paper, lightly grasping,
strongly grasping, pointing finger, and scissors).
We measured each gesture, and took for each four
seconds. Since we wanted to have practical setting,
we did not exclude the duration time sEMG being
stabilized. We started to measure sEMG for four
seconds when the user started to perform each
gesture.
Senso
r
No
HAMT 2020 - Special Session on Human-centric Applications of Multi-agent Technologies
356
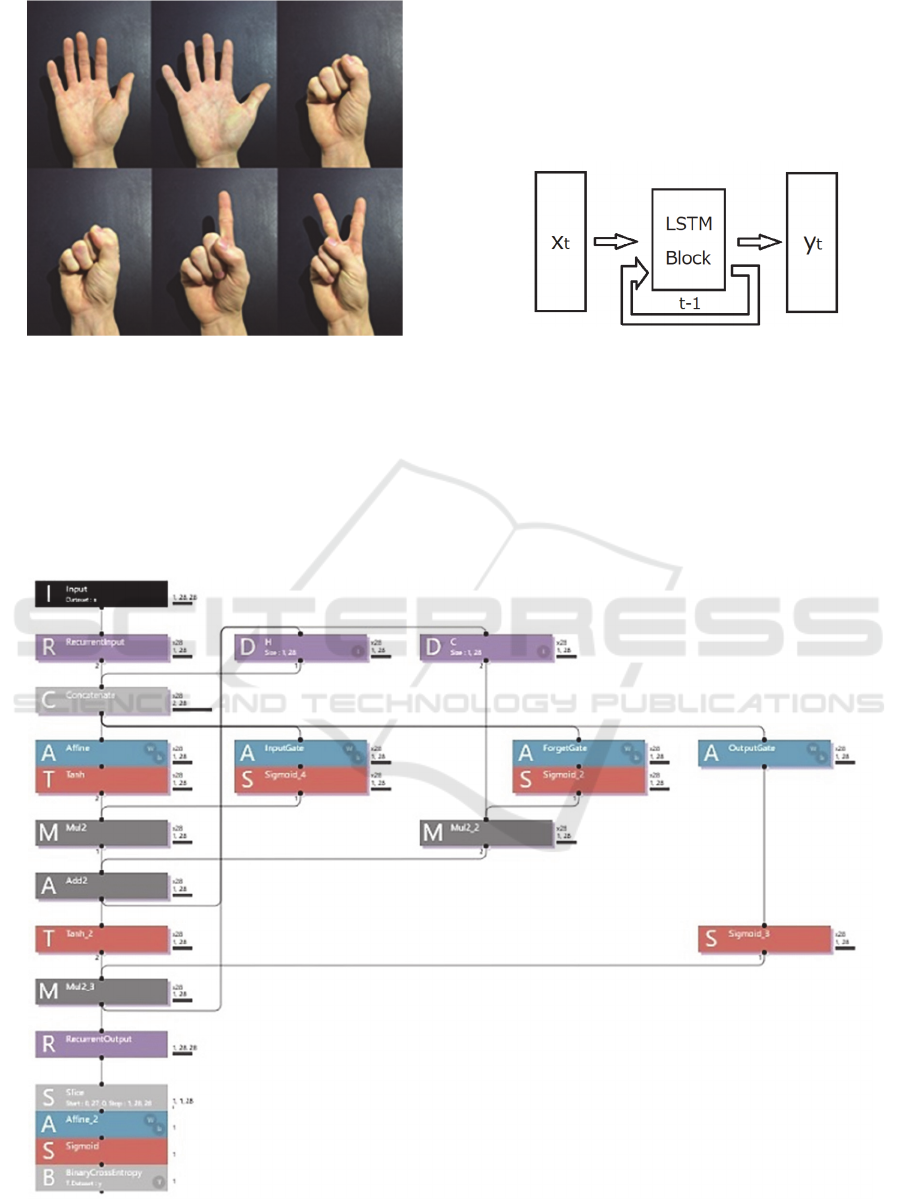
Figure 2: Hand Gestures to measure.
2.2 Configuring LSTM Networks
We used SONY's Neural Network Console (NNC) as
an integrated development environment for deep
learning. We have fine-tuned the LSTM included in
the NNC sample and used for learning. The LSTM
that we used for learning has three gates (Input Gate,
Output Gate, and Forget Gate) in the hidden layer.
The hidden layer is called LSTM Block. Owing to
this hidden layer, the LSTM exhibits high
discriminant performance for time series data. Figure
3 shows the structure of LSTM, and Figure 4 shows
the network that was actually used for learning.
Figure 3: LSTM Structure.
2.3 Method for Obtaining Learning
Data
In this study, we constructed a system that records
sEMG data obtained from Myo and stores in a CSV
file for every 10ms (Figure 5). The digital values of
Figure 4: Network Used for Learning.
Input Layer Output Laye
r
A User Independent Method for Identifying Hand Gestures with sEMG
357
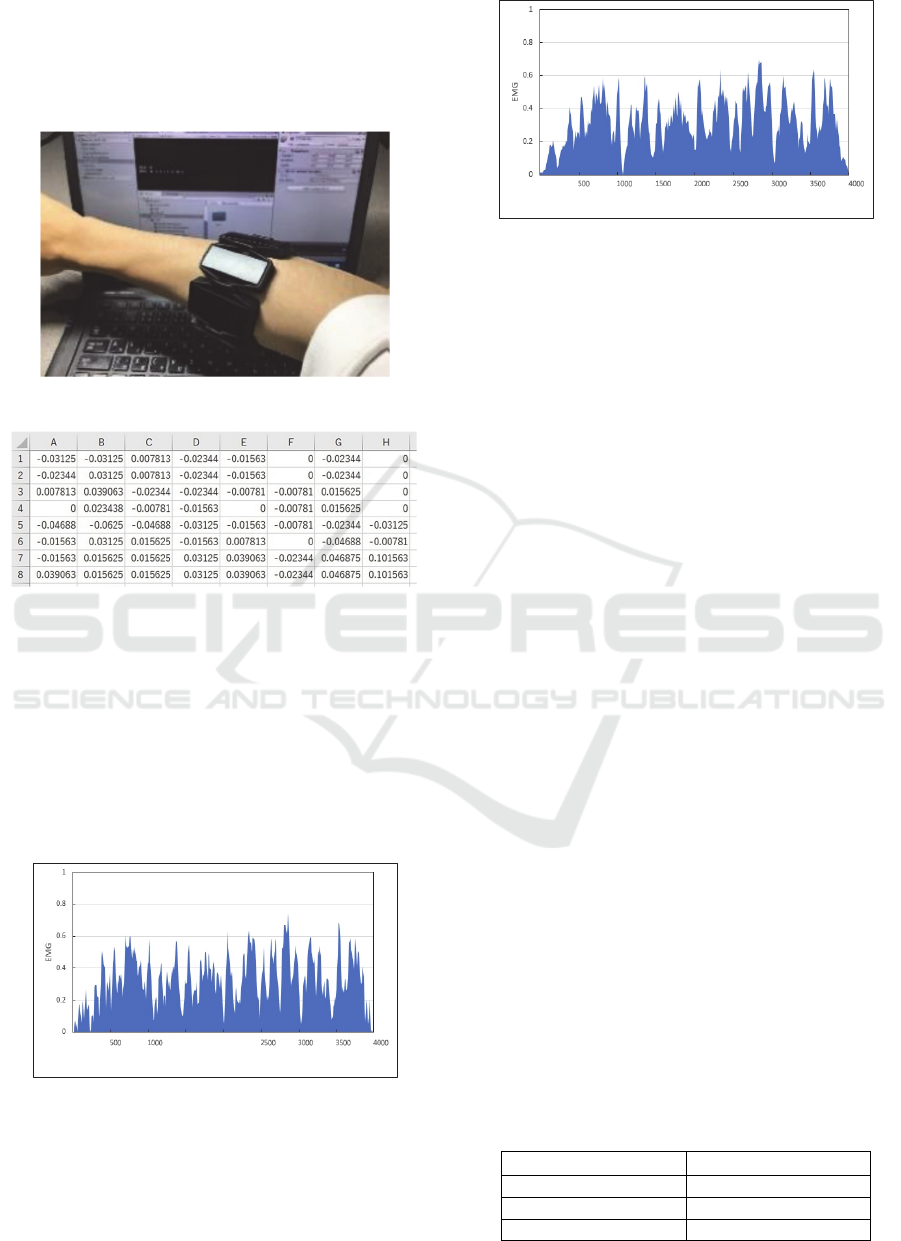
the acquired sEMG are output in the range of -127 to
127. In order to learn in the NNC, however, we had
to convert the data into the normalized data ranged -1
to 1 before outputting to the CSV file. Figure 6 shows
an example of the output CSV file .
Figure 5: Measurement system.
Figure 6: Example of a measured CSV file.
2.4 Data Augmentation
We added some random noise data range of -0.15 to
0.15 to each measured sEMG datum. Further
augmented data smoothed by taking the average value
for every 20ms. We then generated ten new data with
random noise from one measurement datum and
added to the original data. We made learning be done
with dataset eleven times as the original data.
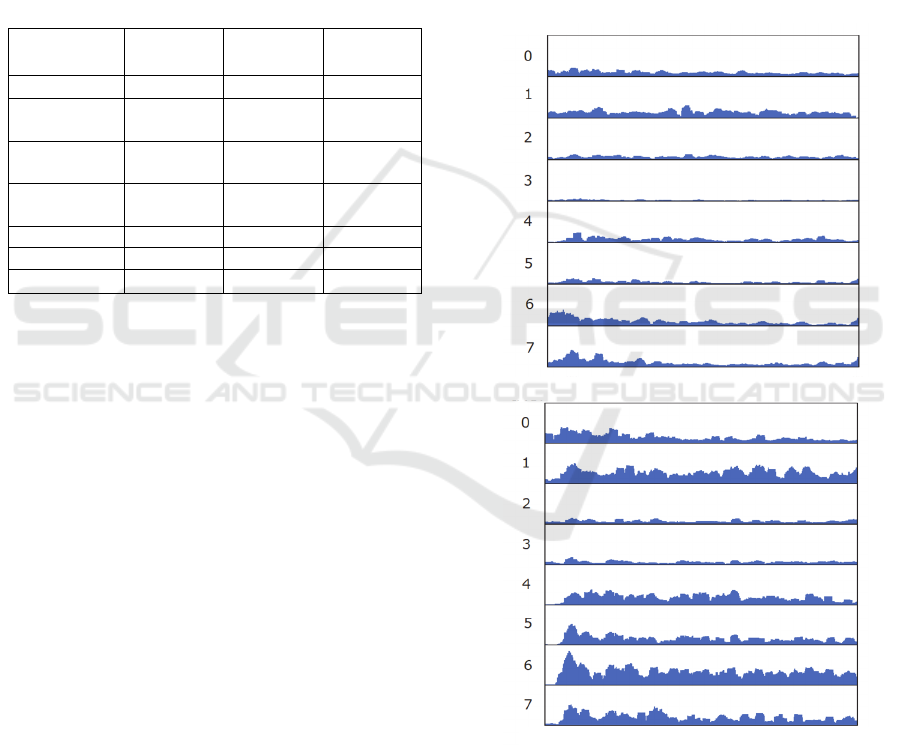
Figure 7: Measured sEMG data.
Figure 7 and 8 show an example of the data measured
by sensor No. 0 and the corresponding newly
generated data by adding noise respectively.
Figure 8: sEMG data with augmented processing.
3 EXPERIMENT
3.1 Accuracy of Reattaching Myo
The author measured his own learning data (2,880).
When we measured Myo continuously for learning
data and evaluation data without attaching and
detaching, the accuracy was 96.38%. On the other
hand, when we measured Myo for learning data,
detached Myo, and then measured the evaluation data
by attaching the same position as the previous time as
much as possible, the accuracy of the evaluation data,
which were determined by the previous learned
parameters, was 35.00%. We can observe that the
accuracy decreased significantly by the deviation at
the time of mounting.
We measured the learning and evaluation data by
re-wearing Myo at seven angles deliberately shifted
by 15 degrees for the deviation. We made the
machine learn with a total of 22,680 data. The
evaluation data were data measured after re-wearing
Myo. As a result, we found 93.3% accuracy even
when there was a deviation of re-wearing Myo. From
this, it can be said that it is possible to prevent the
decrease of the accuracy due to deviation at the time
of mounting, by mounting it in several places.
Table 1 shows the evaluation results when the
learning data was measured by wearing Myo at seven
angles. The accuracy shown in Table 1 is the
percentage of correctly determined in all inferences.
The precision is the rate of correctly determined and
estimated to be true. The recall is the percentage of
estimated to be true if the data is true. The F-measures
is the harmonic mean of the precision and the recall.
Table 1: Evaluation results of learning.
Accurac
y
93.3%
Precision 94.2%
Recall 93.3%
F-Measures 93.3%
Time
[
ms
]
Time [ms]
HAMT 2020 - Special Session on Human-centric Applications of Multi-agent Technologies
358
3.2 Gesture Classification on Different
Subject's sEMG
We have investigated whether an unspecified number
of users can use the current learned parameters. We
have employed three new subjects, and repeated the
measurement 60 times. We have used the previously
learned parameters described above, and determined
with the data of three people. As a result, the average
of the correct answer rate of the three people
significantly decreased to 43.89%. Table 2 shows the
discriminant results.
Table 2: Determination results for each subject.
Gesture
T
y
pe
Recall of
Subject A
Recall of
Subject B
Recall of
Subject C
Pa
p
e
r
40.0% 0.0% 70.0%
lightly
Grasping
20.0% 20.0% 0.0%
Strongly
Grasping
80.0% 50.0% 80.0%
Pointing
Fin
g
e
r
80.0% 60.0% 100%
Scissors 60.0% 0.0% 0.0%
weakness 70% 60.0% 0.0%
Average 58.3% 31.7% 41.7%
When examining the gestures individually, the
"strongly grasped" and "pointing finger" gestures
provided a high accuracy regardless of the
individuals, but "lightly grasping" and "scissors"
gestures hardly provided any accuracy. Figures 9 and
10 show examples of sEMG measurement data for the
"lightly grasped" and "scissor" gestures. We can
observe that the signals created by "lightly grasping"
and "scissors" actions display variety of wave forms.
They clearly differ from each other in the way of
applying muscle power. It seems that each different
individual applies his or her muscle power for "lightly
grasping" and "scissors" in a quite unique way.
3.3 Results of Data Augmentation with
Random Noise
In order to find out whether the accuracy can be
improved by the data augmentation, we have acquired
additional data. The subjects were asked to wear Myo
at three angles and we measured 3,240 data. In the
experiments, we added some random noise data to
these collected data, and augment the number of data
eleven times as many as the original ones, and made
perform learning with 35,640 data. We measured
another set of 3,240 evaluation data in the same
manner as the learning data. As a result of learning
only the measured data, the accuracy was 75.03%.
The accuracy of learning that augmented the data was
78.48%. In other words, the accuracy improved by
3.45%.
We observed a little improvement of the accuracy.
Even though for some gesture, we observed a case
where learning with only measurement data showed
higher accuracy than learning with augmented data,
in general, learning with augmented data displays
better accuracy. Table 3 shows the discriminant
accuracy of each gesture of the classifier learned only
by the measurement data and the classifier learned
using the augmented data.
Figure 9: Lightly Grasp (Upper: Learning Data, Lower:
Subject A).
Sensor No
Time
A User Independent Method for Identifying Hand Gestures with sEMG
359
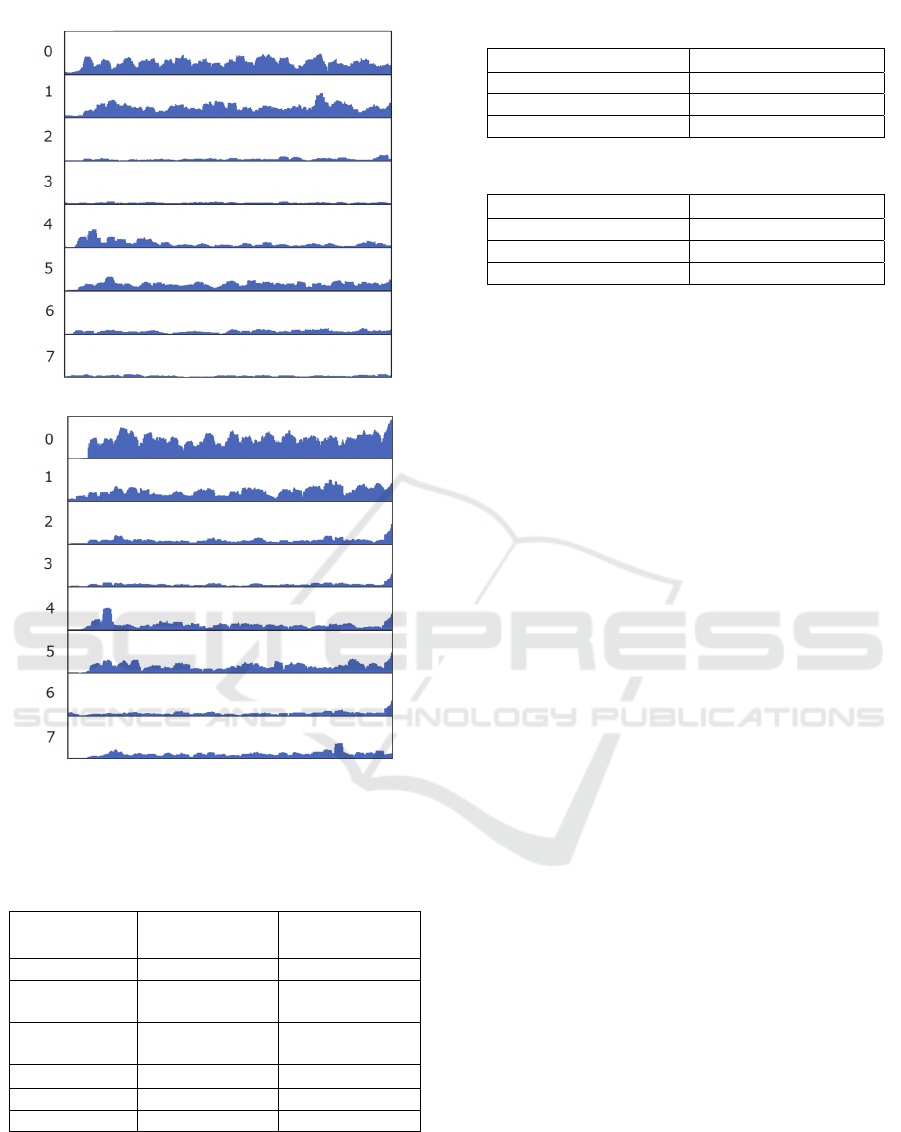
Figure 10: Scissors (Upper: Learning Data, Lower: Subject
A).
Table 3: Changes in detection rates due to data
augmentation.
Gesture
T
y
pe
Recall of
Measured Data
Recall of
Augmented Data
Pape
r
61.7% 50.0%
lightly
Grasping
82.6% 77.0%
Strongly
Gras
p
in
g
94.1% 96.7%
Pointing Finger
85.9% 64.8%
Scissors 31.5% 82.4%
weakness 94.4% 100.0%
Table 4 and Table 5 show the evaluation results by
each classifier.
Table 4: Evaluation Results for Measurement Data only.
Accurac
y
75.0%
Precision 77.3%
Recall 75.0%
F-Measures 74.0%
Table 5: Evaluation Results with augmented Data.
Accurac
y
78.5%
Precision 80.4%
Recall 78.5%
F-Measures 78.0%
4 DISCUSSION
By attaching Myo and changing the angle several
times, we could improve the accuracy even if the
subjects re-wear Myo. The reason for this
phenomenon might be the leaning does not only
depends on the value of each sEMG sensor, but also
it depends on the numerical balance of the eight
sEMG sensors. By learning the data with unfixed
angle, we could avoid the over-fit that depends on a
specific sensor.
We have found that different individuals provide
different output values of sEMG even with the same
gesture. In order to avoid overfitting individual-
dependent features, it is necessary to measure data
from a large number of people. The need to collect
data from many people is clear from the result that the
accuracy decreased to 43.89% when we applied one
specific person's data to others.
On the other hand, the method of changing the
angle while measuring requires a large number of
repetitions of measurement, thus requires an
extremely long measurement time. In order to
measure data efficiently, data expansion is essential.
With parameters learned by a specific individual’s
data, the accuracy becomes very low as determining
the gesture of another person. One of the reason is that
the way of the muscle power applied to the fingers of
each person is different even in the same gesture
movement. For example, in the case of the "scissors"
gesture, some people don't put any muscle force on
their thumbs, and some other people put their thumb
and ring finger on top of each other. Even performing
the same gesture, there are different patterns in which
applying the muscle force. It is difficult to determine
the gesture in such cases.
The second reason is that the effect of individual
differences in the muscle strength of the entire hand.
Even with the same gesture, the condition of applying
muscle force to the whole hand is different. Although
Time
Sensor No
HAMT 2020 - Special Session on Human-centric Applications of Multi-agent Technologies
360

sEMG may be able to solve this by normalizing the
width between the maximum value and minimum
value of the measured value, it may be difficult to
distinguish between the state of straining muscle and
the state of relax. Therefore, to grasp the force level
of each subject in advance, it is necessary to match
the process of some criteria. For example, we can
divide the power levels into three stages of weak,
medium, and strong, and then instruct the subjects to
gesture at the level of "medium".
In machine learning, by collecting and learning
data from a large number of subjects, it should be
possible to generate a classifier that is not affected by
individual differences, such as strength of force and
differences in finger usage. However, it is too
expensive to collect a large amount of data that needs
to be physically measured. Therefore, data
augmentation is also important in this perspective.
In this data augmentation, we have added some
noise data directly to the sEMG sensor measurement
data. However, we are planning to add random noise
only to the fine features that is maintaining the
characteristics of frequency spectrum envelope just as
the analysis method of the audio signal. With this new
data extension method, it may be possible to generate
artificial data with similar characteristics to the
measurement data. Although not included in this
paper, the preliminary experiments suggest that a new
data extension method is effective.
5 CONCLUSION
Hand gestures are not only providing a means of
communication between people, but also attracting
attention as a method for operating electronic devices
and robots. Conventional recognition method using
computer vision requires camera and method using
sensors requires wearing glove-type devices.
In recent years, the performance of the classifier
by machine learning method such as deep learning
has been improved. Therefore, there are many studies
that try to improve the discriminant accuracy by
learning sEMG of hand gestures. In this study, we
measured sEMG using the armband type device Myo,
which is easy to attach and detach, and learning by
the network of LSTM model of RNN, and
experimented with the method of determining the
hand gestures for an unspecified number of subjects.
We have performed the following experiments.
1. Discriminant accuracy by wearing Myo with
deviation.
2. Discriminant accuracy in classifiers learned
by data measured by deliberately shifting
angles.
3. Expansion of learning data by random noise.
The summary of the experimental results are as
follows.
1. By learning with the data measured by
wearing Myo from multiple angles, the
inaccuracy due to the wearing deviation is
reduced, and robustness is improved.
2. As the data extension, the improvement of
the discriminant accuracy can be expected
by adding noise.
As a future direction, we will try to reduce the
influence of individual muscle force by measuring at
the strength level of weak, medium, and strong. In
regard to the data augmentation, we are planning to
develop an interface that can be used by anyone with
minimal adjustment by trying a method to generate
similar to artificial data that maintains the
characteristics of spectral envelope.
REFERENCES
S. Mitra and T. Acharya, 2007. Gesture recognition: A
survey, IEEE Trans. Syst., Man, Cybern. C, Appl. Rev.,
Vol. 37, No. 3, pp. 311–324.
X.Zhang, X.Chen, Y.Li, V.Lantz, K.Wang, and J. Yang,
2011. A framework for hand gesture recognition based
on accelerometer and EMG sensors. IEEE Trans. Syst.,
Man, Cybern. A, Syst. and Humans, Vol. 41, No. 6,
p.1064-1076.
Kuang-Yow Lian, Chun-CHieh Chiu, Yong-Jie Hong and
Wen-Tsai Sung.. 2017. Wearable Armband for Real
Time Hand Gesture Recognition. IEEE International
Conf. Syst., Man, Cybern.. pp. 2992-2995.
G. Matrone, C. Ciprian, M. C. Carrozza and G. Magene,
2011. Two-Channel Real-Time EMG control of a
Dexterous Hand Prosthesis. Proceedings of the 5th
International IEEE EMBS Conf. on Neural Eng., pp.
554-557.
M. Rossi, S. Benatti, E. Farella, and L. Benini, Hybrid EMG
classifier based on HMM and SVM for hand gesture
recognition in prosthetics, 2015. Proc. Int. Conf. Ind.
Technol., pp. 1700–1705.
Xilin Liu, Jacob Sacks, Milin Zhang, Andrew G.
Richardson, Timothy H. Lucas, and Jan Van der
Spiegel, 2017. The Virtual Trackpad: An Electro
myography-Based, Wireless, Real-Time, Low-Power,
Embedded Hand-Gesture-Recognition System Using
an Event-Driven Artificial Neural Network, IEEE
Trans. Circuits and Sys., Vol.64, No.11, pp. 1257-1261.
Koike Y, Honda k, Hirayama R, Eric V and Kawato M.,
1993. Estimation of Isometric Tongues from surface
electromyography using a neural network Models.
A User Independent Method for Identifying Hand Gestures with sEMG
361

IEICE Trans. Inf.& Syst.(Japanese Edition) , Vol. J76-
D2, No.6, pp. 1270-1279.
Koike Y. and Kawato M.,1994. Trajectory formation
surface EMG signals using a neural network model,
IEICE Trans. Inf.& Syst.(Japanese Edition), Vol.J77-
D2, No.1, pp. 193-203.
Koike Y, Kawato M., 1995. Estimation of dynamic joint
torques and trajectory formation from surface
electromyography signals using a neural network
model. Biol. Cybern. Vol.73, No.4, pp. 291-300.
Cheron G, Draye JP, Bourgeois M, Libert G., 1996. A
dynamic neural network identification of
electromyography and arm trajectory relationship
during complex movements, IEEE Trans. Biomed. Eng.
Vol.43, No.5, pp.552-558.
Cheron G, Leurs F, Bengoetxea A, Draye JP, Destrée M,
Dan B., 2003. A dynamic recurrent neural network for
multiple muscles electromyographic mapping to
elevation angles of the lower limb in human
locomotion, Journal of Neuroscience Methods,
Vol.129, No.2, pp.95-104.
Yuheng Wu, Bin Zheng and Yongting Zhao, 2018.
Dynamic Gesture Recognition Based on LSTM-CNN,
Chinese Automation Congress, 2018, pp.2446-2450.
Ali Samadani, 2018. Gated Recurrent Neural Networks for
EMG-Based Hand Gesture Classification: A
Comparative Study, 40th Annual International Conf. of
the IEEE Engineering in Medicine and Biology Society,
pp.1094-1097.
Fernando Quivira, Toshiaki Koike-Akino, 2018. Ye Wang
and Deniz Erdogmus, Translating sEMG Signals to
Continuous Hand Poses using Recurrent Neural
Networks, IEEE EMBS International Conf. on
Biomedical & Health Informatics, pp. 166-169.
G.-C. Luh, Y.-H. Ma, C.-J. Yen, and H.-A. Lin, 2016.
Muscle-gesture robot hand control based on semg
signals with wavelet transform features and neural
network classifier, in Machine Learning and
Cybernetics (ICMLC), vol. 2. IEEE, pp. 627–632.
M. Haris, P. Chakraborty, and B. V. Rao, 2015. Emg signal
based finger movement recognition for prosthetic hand
control, in Communication, Control and Intelligent
Systems (CCIS), IEEE, 2015, pp. 194– 198.
M. E. Benalcazar, A. G. Jaramillo, J. A. Zea, A. P ´ aez, and
V. H. ´ Andaluz, 2017. Hand gesture recognition using
machine learning and the Myo armband, 25th European
Signal Processing Conference (EUSIPCO), pp.1040-
1044.
Guan-Chun, L., Heng-An, L., Yi-Hsiang, M., ChienJung,
Y., 2015. Intuitive Muscle-Gesture Based Robot
Navigation Control Using Wearable Gesture Armband.
In: 2015 International Conference on Machine
Learning and Cybernetics (ICMLC), vol. 1, pp. 389–
395. IEEE Conference Publications.
M. Hioki and H. Kawasaki, 2012. Estimation of finger joint
angles from sEMG using a neural network including
time delay factor and recurrent structure, Int Scholarly
Res Netw (ISRN) Rehabil, vol. 2012.
F. E. R. Mattioli, E. A. Lamounier, A. Cardoso, A. B.
Soares, and A. O. Andrade, 2011. Classification of
EMG signals using artificial neural networks for virtual
hand prosthesis control, in 2011 Annual International
Conference of the IEEE Engineering in Medicine and
Biology Society, pp. 7254–7257.
C. Choi and J. Kim, 2007. A Real-time EMG-based
Assistive Computer Interface for the Upper Limb
Disabled, Proceedings of the 2007 IEEE 10th
International Conf. on Rehabilitation Robotics, pp. 459-
462.
M. Arvetti, G. Gini, and M. Folgheraiter, 2007.
Classification of EMG signals through wavelet analysis
and neural networks for controlling an active hand
prosthesis, Proceedings of the 2007 IEEE 10th
International Conference on Rehabilitation Robotics,
pp. 531-536.
V. P. Singh and D. K. Kumar, 2008. Classification of low-
level finger contraction from single channel Surface
EMG, 30th Annual International IEEE EMBS
Conference Vancouver, pp. 2900-2903.
H. Kawashima, N. Tsujiuchi, and T. Koizumi, 2008. Hand
Motion Discrimination by EMG Signals without
Incorrect Discriminations that Elbow otions Cause,
30th Annual International IEEE EMBS Conference
Vancouver, pp. 2103-2107.
J. U. Chu, I. Moon, and M. S. Mun, A real-time EMG
pattern recognition system based on linear-nonlinear
feature projection for a multifunction myoelectric hand,
IEEE Transactions on Biomedical Engineering, Vol.
53, pp. 2232-2239, July. 2006.
H. Huang and C. Chen, 1999. Development of a
Myoelectric Discrimination System for a Multi Degree
Prosthetic Hand, Proceeding of the 1999 IEEE,
International Conference on Robotics & Automation,
pp. 2392-2397.
K. Englehart, B. Hudgins, and P. A. Parker, 2001. A
wavelet-based continuous classification scheme for
multifunction myoelectric control, IEEE Trans.
Biomed. Eng., vol. 48, no. 3, pp. 302–311.
D. Peleg, E. Braiman, E. Yom-Tov, and G. F. Inbar, 2002.
Classification of finger activation for use in a robotic
prosthesis arm, IEEE Trans. Neural Syst. Rehabil. Eng.,
vol. 10, no. 4, pp. 290–293.
Y. Yazama, M. Fukumi, Y. Mitsukura, and N. Akamatsu,
2003. Feature analysis for the EMG signals based on
the class distance, in Proc. 2003 IEEE Int. Symp.
Computational Intell. Robotics Autom., vol. 2, pp. 860–
863.
Frederic Kerber, Michael Puhl and Antonio Kr¨uger, 2017.
User-Independent Real-Time Hand Gesture
Recognition Based on Surface Electromyography,
Proceedings of the 19th International Conference on
Human-Computer Interaction with Mobile Devices and
Services, No.36, pp.1-7.
HAMT 2020 - Special Session on Human-centric Applications of Multi-agent Technologies
362
