
On the Metrics and Adaptation Methods for Domain Divergences of
sEMG-based Gesture Recognition
Istv
´
an Ketyk
´
o
a
and Ferenc Kov
´
acs
b
Nokia Bell Labs, Budapest, Hungary
Keywords:
Machine Learning, Time-series Modeling, sEMG/EMG, Divergence Metrics, Domain Adaptation.
Abstract:
We propose a new metric to measure domain divergence and a new domain adaptation method for time-series
classification. The metric belongs to the class of probability distributions-based metrics, is transductive, and
does not assume the presence of source data samples. The 2-stage method utilizes an improved autoregressive,
RNN-based architecture with deep/non-linear transformation. We assess our metric and the performance of our
model in the context of sEMG/EMG-based gesture recognition under inter-session and inter-subject domain
shifts.
1 INTRODUCTION
Machine Learning (ML) is widely used for several
tasks with time-series and biosensor data such as for
human activity recognition, electronic health records
data-based predictions (Ismail Fawaz et al., 2019),
and real-time bionsensor-based decisions. Various
classification goals are addressed related to electro-
cardiography (ECG) (Jambukia et al., 2015), elec-
troencephalography (EEG) (Craik et al., 2019; Dose
et al., 2018), and electromyograpy (EMG) (Ketyk
´
o
et al., 2019; Hu et al., 2018; Patricia et al., 2014; Du
et al., 2017).
Sensing hand gestures can be done by means of
wearables or by means of image or video analysis of
hand or finger motion. A wearable-based detection
can physically rely on measuring the acceleration and
rotations of our body parts (arms, hands or fingers)
with Inertial Measurement Unit (IMU) sensors or by
measuring the myo-electric signals generated by the
various muscles of our arms or fingers with EMG sen-
sors. Surface EMG (sEMG) records muscle activity
from the surface of the skin which is above the mus-
cle being evaluated. The signal is collected via sur-
face electrodes.
We are interested in sEMG-sensor placement to
the forearm and performing hand gesture recognition
with ML. In this context, all ML prediction mod-
els suffer from inter-session and inter-subject domain
a
https://orcid.org/0000-0003-4931-4580
b
https://orcid.org/0000-0002-9777-0372
domain shift
intra-session
inter-session
inter-subject
Variation in gesture duration,
force level
Variation in sensor placement
Variation in muscle physiology
Figure 1: Domain shift in case of different scenarios.
shifts (see Figure 1).
• Intra Session Scenario: the device is not removed,
and the training and validation data are recorded
together in the same session of the same subject.
In this situation the gesture recognition accuracy
is generally above 90%.
• Inter-session Scenario: the device is reattached,
and the validation data is recorded separately in a
new session of the same subject. Under this do-
main shift the validation accuracy degrades below
50%.
• Inter-subject Scenario: The validation data is on
another subject. In this case, the validation accu-
racy degrades below 50% as well.
Our focus is to investigate: 1) the metrics of these
domain discrepancies, and 2) the adaptation solutions
with special attention on those, which do not rely on
Ketykó, I. and Kovács, F.
On the Metrics and Adaptation Methods for Domain Divergences of sEMG-based Gesture Recognition.
DOI: 10.5220/0009369501210132
In Proceedings of the 13th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2020) - Volume 4: BIOSIGNALS, pages 121-132
ISBN: 978-989-758-398-8; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
121

source data samples.
This paper is organized as follows, Section 2 pro-
vides a summary of ML, model risks, domains, do-
main divergences, and domain adaptation methods.
Then our source data-absent metric and adaptation
model is introduced in Section 3. Next, we vali-
date our approaches using publicly available sEMG
datasets: the experimental setup and results are de-
scribed in Section 4. Finally, we conclude and sum-
marize our results.
2 RELATED WORK
2.1 Machine Learning
At the most basic level, ML seeks to develop methods
for computers to improve their performance at certain
tasks on the basis of observed data. Almost all ML
tasks can be formulated as making inferences about
missing or latent data from the observed data. To
make inferences about unobserved data from the ob-
served data, the learning system needs to make some
assumptions; taken together these assumptions con-
stitute a model. The probabilistic approach to mod-
eling uses probability theory to express all forms of
uncertainty. Since any sensible model will be un-
certain when predicting unobserved data, uncertainty
plays a fundamental part in modeling. The probabilis-
tic approach to modeling is conceptually very simple:
probability distributions are used to represent all the
uncertain unobserved quantities in a model (including
structural, parametric and noise-related) and how they
relate to the data. Then the basic rules of probabil-
ity theory are used to infer the unobserved quantities
given the observed data. Learning from data occurs
through the transformation of the prior probability
distributions (defined before observing the data), into
posterior distributions (after observing data) (Ghahra-
mani, 2015).
We define an input space X which is a subset of d-
dimensional real space R
d
. We define also a random
variable X with probability distribution P(X) which
takes values drawn from X. We call the realisations
of X feature vectors and noted x
i
.
A generative model describes the marginal distri-
bution over X : P
Θ
(X), where samples x
i
of X are ob-
served at learning time in a dataset D and the probabil-
ity distribution depends on some unknown parameter
Θ. A generative model family which is important for
time-series analysis is the autoregressive one. Here,
we fix an ordering of the variables X
1
,X
2
,.. .,X
n
and
the distribution for the i-th random variable depends
on the values of all the preceding random variables
in the chosen ordering X
1
,X
2
,.. .,X
i−1
(Bengio et al.,
2015). By the chain rule of probability, we can fac-
torize the joint distribution over the n-dimensions as:
P
Θ
(X) =
n
∏
i=1
P
Θ
(X
i
| X
1
,X
2
,.. .,X
i−1
) (1)
We define also an output space Y and a random vari-
able Y taking values y
i
drawn from Y with distribution
P(Y ). In the supervised learning setting Y is condi-
tioned on X (i.e., Y ∼ P(Y | X )), so the joint distribu-
tion P(X,Y ) is actually P(X)P(Y | X).
A discriminative model is relaxed to the posterior
conditional probability distribution: P
Θ
(Y | X) and it
reflects straight the discrimination/classification task
with lower asymptotic errors than the generative mod-
els. This transductive learning setting has been intro-
duced by Vapnik (Ng and Jordan, 2001).
For all modeling approaches, the learning is to fit
their distributions over the observed variables x
i
in our
dataset D. With other words (of a statistician), a good
estimate of the unknown parameter Θ would be the
value of Θ that maximizes the likelihood of getting
the data we observed in our dataset D. Formally, the
goal of the Maximum Likelihood Estimation (MLE)
is to find the Θ:
Θ = argmax
Θ
P
Θ
(D) = argmax
Θ
∑
x
i
∈D
logP
Θ
(x
i
) (2)
Learning in neural networks is about solving optimi-
sation problems. In case of probabilistic (and differ-
entiable) cost functions, the backpropagation method
(Rumelhart et al., 1986) is an estimator for MLE.
2.2 Risk of Machine Learning Models
We start with the general and probabilistic description
then we move on to the discriminative models.
Let us introduce the concept of loss function. A
loss function L(x
i
,P
Θ
) measures the loss that a model
distribution P
Θ
makes on a particular instance x
i
. Our
goal is to find the model P
Θ
that minimizes the ex-
pected loss or risk:
R(P
Θ
) = E
x
i
∼P(X)
[L(x
i
,P
Θ
)] (3)
Note that the loss function which corresponds to MLE
is the log loss −log P
Θ
(x
i
). The risk evaluated on D
is the in-sample error or empirical risk:
ˆ
R(P
Θ
) =
1
|D|
∑
x
i
∈D
L(x
i
,P
Θ
) (4)
The generalization gap is the R(P
Θ
) −
ˆ
R(P
Θ
) and
our model intends to have small probability that this
difference is larger than a very small value ε.
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
122

In case of supervised learning setting,
we have a paired dataset of observations
D = {(x
1
,y
1
),.. .,(x
m
,y
m
)}. The loss func-
tion becomes the conditional log-likelihood
L(x
i
,y
i
,P
Θ
) = −log P
Θ
(y
i
| x
i
) and the risk is
described as:
R(P
Θ
) = E
(x
i
,y
i
)∼P(X,Y )
[L(x
i
,y
i
,P
Θ
)] (5)
Let us introduce the hypothesis space H which is
the set/class of predictors {h : X → Y}. A hypothesis
h estimates the target function f : X → Y from D. The
target function f is a proxy for the conditional distri-
bution P(Y | X ), such as: y
i
= f (x
i
) + ζ, where ζ is
the noise term. Substituting h into Equation (5) we
get the transductive version of the risk:
R
td
(h) = E
(x
i
,y
i
)∼P(X,Y )
[L(y
i
,h(x
i
))] (6)
Substituting h into Equation (4):
ˆ
R
td
(h) =
1
|D|
∑
(x
i
,y
i
)∈D
L(y
i
,h(x
i
)) (7)
In the transductive setting the generalisation gap can
be quantified:
Pr[ sup
h∈H
|R
td
(h) −
ˆ
R
td
(h)| > ε] (8)
2.3 Domain and Domain-shift Concepts
First, it is necessary to clarify what a domain is
and what kind of domain discrepancies there can be.
There are several good survey papers that describe
this field deeply e.g., (Kouw, 2018), (Kouw and Loog,
2019), and (Csurka, 2017). In this paper, the do-
main adaptation-related problem statement and nota-
tions follow (Kouw, 2018).
The problem statement is introduced from a clas-
sification point of view to simplify the definitions,
but it can be generalized to other supervised machine
learning tasks. A domain contains three elements: In-
put space X, Output space Y and P(X,Y ) joint distri-
bution over X and Y.
Two domains are different if at least one of their
above mentioned components are not equal. In case
of DA the input spaces and output spaces of the do-
mains are the same but the distributions are different.
More general cases belong to different fields of trans-
fer learning, a detailed taxonomy of transfer learning
tasks can be found in (Pan and Yang, 2010). During
DA there is a trained machine learning model on a
so-called source domain (S) and there is an intent to
apply it on a target domain (T). From this point on-
wards S and T in subscript refer to source and target
domains.
Let us analyze the risk of a source classifier (Equa-
tion (6)) on a target domain T in the cross-domain
setting:
R
T
(h) =
∑
y∈Y
Z
X
L(h(x) | y)P
T
(x,y)dx
=
∑
y∈Y
Z
X
L(h(x) | y)P
S
(x,y)
P
T
(x,y)
P
S
(x,y)
dx (9)
It can be seen that the ratio of the source and tar-
get joint distributions (P
T
(X,Y )/P
S
(X,Y )) defines the
risk R
T
(h). The investigation of this ratio allows us
to define domain shift cases (Moreno-Torres et al.,
2012): prior shift, covariate shift and concept shift.
In case of prior shift, the marginal distribution of
the labels are different between the source domain and
the target domain P
S
(Y ) 6= P
T
(Y ), but the conditional
distributions are equal P
S
(X | Y ) = P
T
(X | Y ). Typi-
cal example for prior shift: the symptoms of a disease
are usually population independent but the distribu-
tion of the diseases is population dependent. These
conditions allow us to simplify the risk:
R
T
(h) =
∑
y∈Y
Z
X
L(h(x) | y)P
S
(x,y)
P
T
(x,y)
P
S
(x,y)
dx
=
∑
y∈Y
Z
X
L(h(x) | y)P
S
(x,y)
P
T
(x | y)P
T
(y)
P
S
(x | y)P
S
(y)
dx
=
∑
y∈Y
Z
X
L(h(x) | y)P
S
(x,y)
P
T
(y)
P
S
(y)
dx (10)
This means, that the complete labeled dataset from the
target domain is not needed but the estimation of the
marginal distribution of the labels P
T
(Y ) is needed on
the target domain.
Covariate shift is a well-studied domain shift, for
further reference see (Kouw, 2018). It is defined as
follows: the posterior distributions are equivalent, this
means P
T
(Y | X) = P
S
(Y | X), but the marginal distri-
butions of the samples are different P
S
(X) 6= P
S
(X).
The typical cause of covariate shift is the sample se-
lection bias. Only the sample distributions determine
the risk:
R
T
(h) =
∑
y∈Y
Z
X
L(h(x) | y)P
S
(x,y)
P
T
(x,y)
P
S
(x,y)
dx
=
∑
y∈Y
Z
X
L(h(x) | y)P
S
(x,y)
P
T
(y | x)P
T
(x)
P
S
(y | x)P
S
(x)
dx
=
∑
y∈Y
Z
X
L(h(x) | y)P
S
(x,y)
P
T
(x)
P
S
(x)
dx (11)
In case of concept shift, the marginal distributions
of input vectors are similar on both source and tar-
get domains P
S
(X) = P
T
(X), on the other hand, the
On the Metrics and Adaptation Methods for Domain Divergences of sEMG-based Gesture Recognition
123

posterior distributions differ from each other P
T
(Y |
X) 6= P
S
(Y | X ). Usually, non-stationary environment
causes this data drift (Widmer and Kubat, 1996). It
is not possible to simplify significantly the cross-
domain risk and the DA cannot be done without la-
beled target data:
R
T
(h) =
∑
y∈Y
Z
X
L(h(x) | y)P
S
(x,y)
P
T
(x,y)
P
S
(x,y)
dx
=
∑
y∈Y
Z
X
L(h(x) | y)P
S
(x,y)
P
T
(y | x)P
T
(x)
P
S
(y | x)P
S
(x)
dx
=
∑
y∈Y
Z
X
L(h(x) | y)P
S
(x,y)
P
T
(y | x)
P
S
(y | x)
dx (12)
In general, none of the above mentioned assump-
tions is valid, thus it is not possible to simplify the
risk on target domain. The differing posterior distri-
butions cause the major domain shift related issues.
The optimal transport approach assumes that there is
transport t() that satisfies P
T
(Y | t(X)) = P
S
(Y | X )
(Courty et al., 2016). Finding this transportation map
is intractable but it is possible to relax it to a sim-
pler optimization problem, where t() is estimated via
a Wasserstein distance minimization between the two
domains (Courty et al., 2016; Kouw and Loog, 2019).
2.4 Divergence Metrics and Theoretical
Bounds
As the input space and output space are common in
case of DA, the distance and divergence metrics of
the distributions can measure and quantify the domain
discrepancies. We elaborate the most common met-
rics in the field of DA.
The Kullback-Leibler divergence (Cover and
Thomas, 1991) is a well-known information theory-
based metric between two distributions. It measures
the relative entropy between two distributions. One
of its main disadvantage is, that it is difficult to calcu-
late it from samples in some cases (Ben-David et al.,
2010).
D
KL
(P
S
kP
T
) =
Z
X×Y
P
S
(x,y)log
P
S
(x,y)
P
T
(x,y)
dxdy
=
∑
y∈Y
Z
X
P
S
(x,y)log
P
S
(x,y)
P
T
(x,y)
dx
(13)
In general, the KL divergence is an asymmetric met-
ric as D
KL
(P
S
kP
T
) 6= D
KL
(P
T
kP
S
). A commonly used
symmetric version is the Jensen-Shannon divergence
(Lin, 1991). It measures the total divergence from the
average divergence.
M =
P
S
+ P
T
2
D
JS
(P
S
kP
T
) =
1
2
(D
KL
(P
S
kM) + D
KL
(P
T
kM)) (14)
The origin of the Wasserstein distance is the opti-
mal transport problem: a distribution of mass should
be transported to another distribution of mass with
minimal cost. Usually Wassersten-1 distance is used
with the Euclidean distance (Arjovsky et al., 2017).
D
W
(P
S
,P
T
) = inf
γ∈Π(P
S
,P
T
)
E
(s,t)∼γ
[ks −tk] (15)
where Π(P
S
,P
T
) is the set of all joint distributions
with marginals P
S
and P
T
. This distance metric al-
lows us to construct a continous and differentiable
loss function (Arjovsky et al., 2017). In case of DA,
this distance is calculated between the marginal dis-
tributions P
S
(X) and P
T
(X) to get a tractable problem
(Kouw, 2018).
The H divergence allows to find upper bound
to cross-domain risk (Kifer et al., 2004; Ben-David
et al., 2006; Ben-David et al., 2010). The definitions
and formulas are provided for binary classification be-
cause of simplification, but they can be generalized to
multi-class problems, as well:
D
H
(P
S
,P
T
) =
2 sup
h∈H
| Pr
x∼P
S
(h(x) = 1) − Pr
x∼P
T
(h(x) = 1)| (16)
(Ben-David et al., 2006) provide two different tech-
niques to estimate H divergence: from finite sample
and from empirical risk of domain classifier. If the
hypothesis space is symmetrical, the empirical H di-
vergence can be calculated from finite samples of the
source and target domains:
ˆ
D
H
(P
S
,P
T
) =
2
1−min
h∈H
1
m
m
∑
i=1
I[h(x
S,i
)=1] +
1
m
0
m
0
∑
i=1
I[h(x
T,i
)=0]
!
(17)
where I is an indicator function which gives 1 if pred-
icate is correct, otherwise 0. For the computation of
ˆ
D
H
(P
S
,P
T
) during the minimization, the whole hy-
pothesis space H must be tackled. (Ben-David et al.,
2006) introduced an approximation to empirical H di-
vergence, which is called Proxy-A Distance:
ˆ
D
A
(P
S
,P
T
) = 2(1 −2
ˆ
R
S/T
), (18)
where
ˆ
R
S/T
is the empirical risk of a linear domain
classifier, which is trained (in a supervised fashion) to
distinguish the source and target domains.
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
124

The cross-domain risk can be estimated by the em-
pirical H divergence:
R
T
(h) ≤ R
S
(h) + R
S+T
(h
∗
) +
ˆ
D
H
(P
S
,P
T
) +C(H),
(19)
where C(H) is a complexity measure of hypothesis
space, R
S+T
(h
∗
) is the risk of the so-called single
good hypothesis. The h
∗
is the best classifier that can
generalize on both domains:
R
S+T
= R
S
(h) + R
T
(h)
h
∗
= argmin
h∈H
(R
S,T
(h)) (20)
The minimization of H divergence gives a better re-
sult, however the the risk of a single good hypothesis
can ruin the performance of the DA. In other words,
if there is no single good hypothesis, the domains are
too far from each other to build an efficient DA.
2.5 Domain Adaptation Techniques
All the adaptive learning strategies focus on identi-
fying how to leverage the information coming from
both the source and target domains. Incorporating ex-
clusively the target domain information is disadvan-
tegous because sometimes there is no labelled targed
data at all, or typically the amount of the labelled tar-
get data is small. Building on information present in
the source domain and adapting that to the target is
generally expected to be the superior solution (Patri-
cia et al., 2014).
We make a split in the viewpoint of source-sample
availability at DA time. We discuss separately meth-
ods that assume source sample availability and meth-
ods that do not, first generally, and later in the context
of sEMG-based gesture recognition.
2.5.1 Source Data-based
The majority of the approaches incorporate the unla-
beled source data samples at DA time. Cycle Genera-
tive Adversarial Network (Cycle-GAN) (Zhu et al.,
2017) is a state-of-the-art deep generative model
which is able to learn and implicitly represent the
source and target distributions to pull them close to-
gether in an adversarial fashion. It is composed of two
Generative Adversarial Networks (GANs) (Goodfel-
low et al., 2014) and learns two mappings (A : T → S
and B : S → T ) to achieve the cycle-consistency be-
tween the source and target distributions (A(B(S)) ≈ S
and B(A(T )) ≈ T ) via the minimax game.
Besides the GANs, the autoassociative Auto En-
coder (AE) models are capable of building domain-
invariant representations in their latent space. The
non-linear Denoising AE (DAE) (Glorot et al., 2011)
builds strong representation of the input distribu-
tion with the help of mastering to denoise the in-
put (augmented with noise or corruptions). As a
side effect, the multi-domain input ends up with a
domain-invariant latent representation in the model.
Inspired by the DAE, a linear counterpart: the
Marginalized Denoising AE (mDA) (Chen et al.,
2012) has been proposed to keep the optimization
convex with closed-form solution and achieve orders-
of-magnitude faster computation (at the expense of
the representation power limited to be linear).
Data augmentation with marginalized corruptions
has been studied for the transductive learning set-
ting (Ng and Jordan, 2001) also. The Marginalized
Corrupted Features (MFC) classifier (van der Maaten
et al., 2014) has strong performance in case of valida-
tion under domain shift. In particular, as the corrupt-
ing distribution may be used to shift the data distribu-
tion in the source domain towards the data distribu-
tion in the target domain - potentially, by learning the
parameters of the corrupting distribution using maxi-
mum likelihood.
In the transductive learning setting a classifier can
be explicilty guided to learn a domain-invariant repre-
sentation of the conditional distribution of class labels
P(Y | X ) among two domains. Domain-Adversarial
Neural Network DANN) (Ganin et al., 2016) adver-
sarially connects a binary domain classifier into the
neural network directly exploiting the idea exhibited
by Equation (19).
The binary domain classifier of the DANN (Ganin
et al., 2016) and the mDA (Chen et al., 2012) have
been paired in (Clinchant et al., 2016) to get DA regu-
larization for the linear mDA model. Hence, the mDA
has been explicitly guided to develop a latent rep-
resentation space which is domain-invariant. Linear
classifiers built in that latent space have had compara-
ble performance results in several image classification
tasks.
The 2-Stage Weighting framework for Multi-
Source Domain Adaptation (2SW-MDA) and the
Geodesic Flow Kernel (GFK) methods in (Patricia
et al., 2014) tackle inter-subject DA for sEMG-based
gesture recognizers. In 2SW-MDA all the data of
each source subject are weighted and combined with
the target subject samples with a linear supervised
method; for GFK the source and target data are em-
bedded in a low-dimensional manifold (with PCA)
and the geodesic flow is used to reduce the domain
shift when evaluating the cross domain sample simi-
larity.
On the Metrics and Adaptation Methods for Domain Divergences of sEMG-based Gesture Recognition
125

2.5.2 Source Data-absent
The overwhelming majority of existing DA methods
makes an assumption of freely available source do-
main data. An equal access to both source and target
data makes it possible to measure the discrepancy be-
tween their distributions and to build representations
common to both target and source domains. In real-
ity, such a simplifying assumption rarely holds, since
source data are routinely a subject of legal and con-
tractual constraints between data owners and data cus-
tomers (Chidlovskii et al., 2016).
Despite the absence of available source samples it
is still possible to rely on: 1) statistical information of
the source retrieved in advance, 2) model(s) trained
on the source data.
CORrelation ALignment (CORAL) (Sun et al.,
2016) minimizes domain shift by aligning the second-
order statistics of source and target distributions,
without requiring any target labels. In contrast to
subspace manifold methods (e.g., (Fernando et al.,
2013)), it aligns the original feature distributions of
the source and target domains, rather than the bases
of lower-dimensional subspaces. CORAL performs
a linear whitening transformation on the source data
then a linear coloring transformation (based on the
second-order statistics of the target data). If the statis-
tical parameters of the source data are retrieved in ad-
vance of the DA then it can be considered as a source
data-absent method.
Adaptive Batch Normalization (AdaBN) (which
is an approximation of the whitening transformation,
usually applied in deep neural networks) is utilised for
DA in (Du et al., 2017) for sEMG-based gesture clas-
sification. Furthermore, it builds upon the deep Con-
volutional Neural Network (CNN) architecture to ex-
tract spatial information from the high-density sEMG
sensor input. However, it is not modeling the possible
temporal information in the time-series data. Apart
from that, it has state-of-the unsupervised DA perfor-
mance which has been validated under inter-session
and inter-subject domain shifts on several datasets.
(Fernando et al., 2013) introduces (linear) sub-
space alignment between the source and target do-
mains with PCA. In the common linear subspace clas-
sifiers can be trained with comparable performance.
The alignments (i.e., the PCA transformations) are
learned on the source and target data, respectively.
If the source alignment is learned (as a model of the
source) in advance of the DA then it can be considered
as a source data-absent method.
(Farshchian et al., 2019) introduces the Adversar-
ial Domain Adaptation Network (ADAN) with an AE
(trained on the source data) for Brain-Machine Inter-
faces (BMIs). With the representation power of the
AE it is possible to capture the source distribution
then continously align the shifting target distributions
back to it. ADAN is trained in an adversarial fashion
with an Energy-based GAN architecture (Zhao et al.,
2017) where the ”energy” is the reconstruction loss of
the AE, and the domain shifts are represented as the
residual-loss distributions of the AE. ADAN learns
via the minimax game to pull the target residual dis-
tributions to those of the source.
In the transductive learning setting (Ng and Jor-
dan, 2001) there are several source data-absent DA
approaches building on the pre-trained source classi-
fier(s).
The Transductive Doman Adaptation (TDA) in
(Chidlovskii et al., 2016) utilizes the representation
capabilities of the mDA (Chen et al., 2012) to (lin-
early) adapt the output of a trained source classifier to
the target domain. TDA performs unsupervised DA in
closed form without the presence of any extra source
information.
The transductive Multi-Adapt and the Multi-
Kernel Adaptive Learning (MKAL) in (Patricia et al.,
2014) both tackle the inter-subject DA for sEMG-
based gesture recognizers by the adaptation of trained
source classifiers. In Multi-Adapt, an SVM is learned
from each source and used as reference (resulted by
a convex optimization) when performing supervised
learning on the target dataset. In MKAL each SVM
source classifier predicts on the target samples and the
scores are used as extra input features for the learning
of the gesture classifier on the target dataset. Multi-
Adapt and MKAL have had comparable performance
at that time even though these models do not capture
the available temporal information in the time-series
data.
(Dose et al., 2018) builds a BMI and investigates
DA for multi-variate EEG time-series data classifi-
cation. The time-series classification of the multi-
variate EEG signals is a very similar challenge to the
multi-variate sEMG signals. (Dose et al., 2018) cap-
tures both the spatial and temporal correlations in the
data with a CNN architecture. However, the DA is
about supervised fine-tuning of all the model parame-
ters on the target subject which is suboptimal as high-
lighted by (Du et al., 2017; Ketyk
´
o et al., 2019).
The 2-Stage Recurrent Neural Network (2SRNN)
model for sEMG gesture recognition and DA in
(Ketyk
´
o et al., 2019) can be viewed as the deep neu-
ral, autoregressive modeling analogy of the MKAL
(Patricia et al., 2014). It utilizes a trained source clas-
sifier and performs supervised DA to the target (ses-
sion or subject) via learning a linear transformation
between the domains. The transformation is then ap-
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
126
𝑥
𝑡
𝑥
2
𝑥
1
𝑥
0
…
ℎ
𝑡
𝑥
𝒕
ℎ
𝟐
ℎ
𝟏
ℎ
𝑡
ℎ
𝟎
=
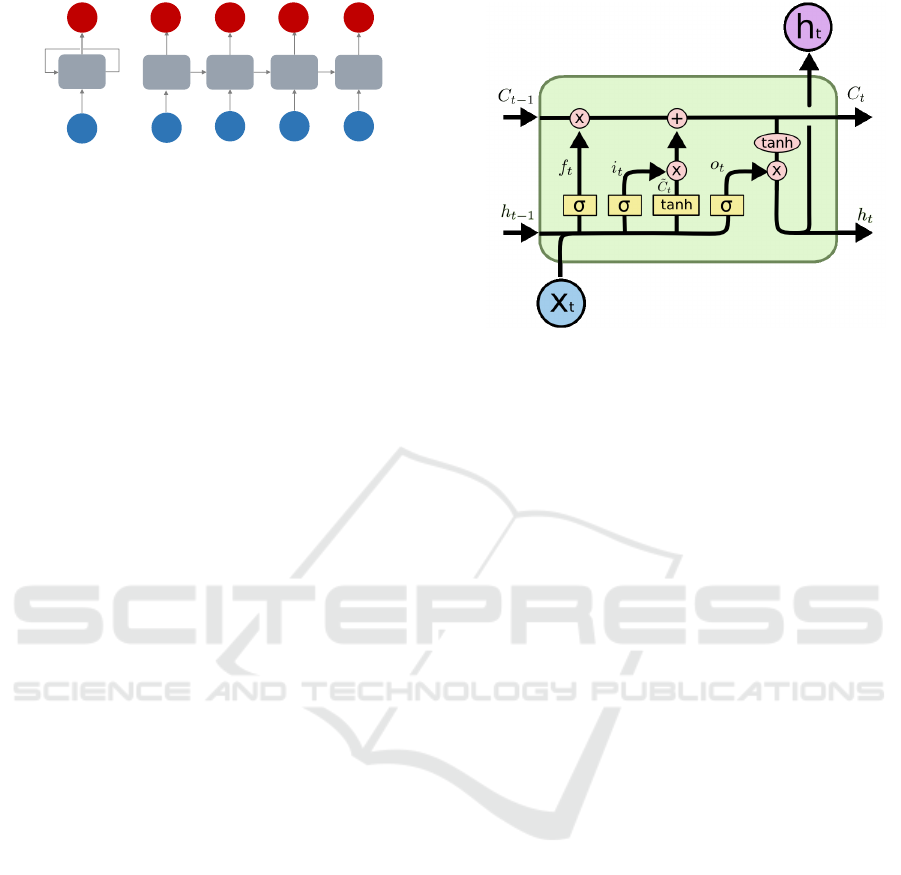
Figure 2: RNN in compact and unrolled representations.
plied to the input (samples coming from the target).
Learning is on the divergent (inter-session or inter-
subject) domains via the backpropagation (Rumelhart
et al., 1986) of the classifier’s cross-entropy loss to its
DA layer (which is a linear readout layer of the input).
The size of its DA layer is less than 1% of the over-
all 2SRNN (in terms of the trainable parameters) so it
achieves fast computation of the DA, and the 2SRNN
has the state-of-the-art performance in inter-session
and inter-subject domain shift validations.
3 OUR DIVERGENCE METRIC
AND ADAPTATION METHOD
We provide a sequential, source data-absent, trans-
ductive, probability-based divergence metric and DA
method as well. First, we introduce the RNN archi-
tecture for temporal modeling, then the source data-
absent and transductive 2SRNN model in details.
3.1 Recurrent Neural Network
Recurrent Neural Network (RNN) (Jordan, 1986)
is an autoregressive neural network architecture in
which there are feedback loops in the system. Feed-
back loops allow processing the previous output with
the current input, thus making the network stateful,
being influenced by the earlier inputs in each step (see
Figure 2). A hidden layer that has feedback loops is
also called a recurrent layer. The mathematical rep-
resentation of a simple recurrent layer can be seen in
Equation (21):
h
t
= σ
h
(W
x
x
t
+ W
h
h
t−1
+ b
t
)
y
t
= σ
y
(W
y
h
t
+ b
y
)
(21)
The hidden state h
t
depends on the input x
t
and
the previous hidden state h
t−1
. There is a non-linear
dependency (via the σ() wrapper) between them.
However, regular RNNs suffer from the vanish-
ing or exploding gradient problems which means that
the gradient of the loss function decays/rises expo-
nentially with time, making it difficult to learn long-
term temporal dependencies in the input data (Pas-
canu et al., 2013). Long Short Term Memory (LSTM)
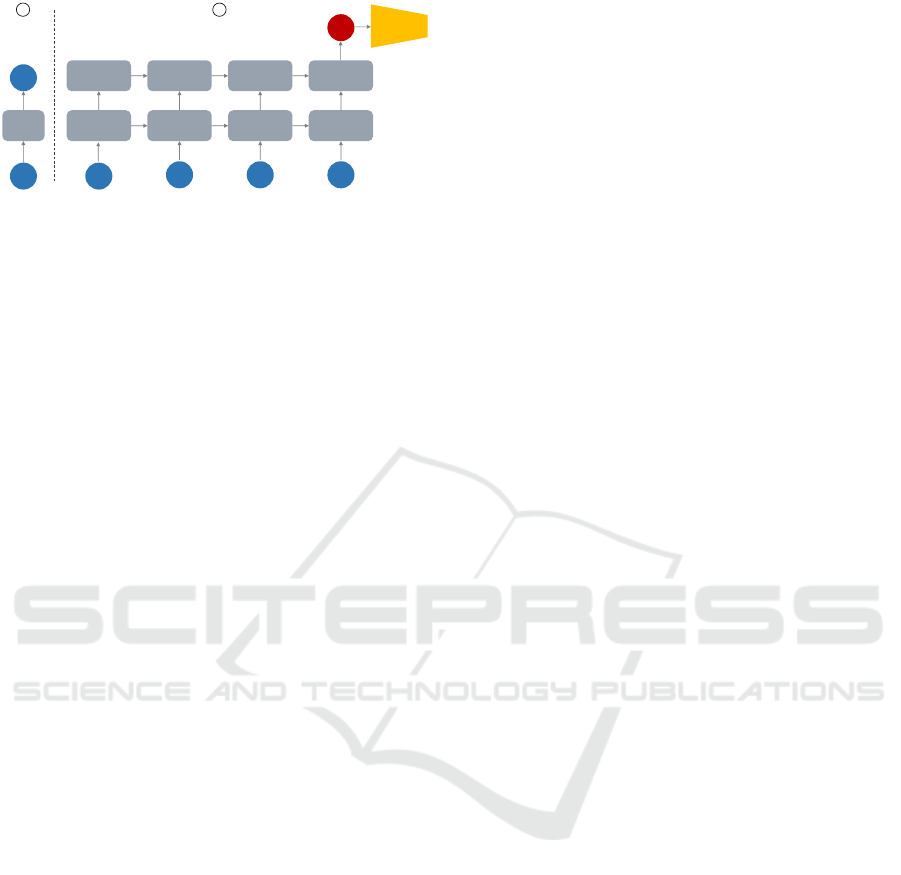
Figure 3: LSTM cell architecture (Olah, 2015).
recurrent cells have been proposed to solve these
(Hochreiter and Schmidhuber, 1997).
f
t
= σ(W
f
· [h
t−1
,x
t
] + b
f
)
i
t
= σ(W
i
· [h
t−1
,x
t
] + b
i
)
e
C
t
= tanh(W
C
· [h
t−1
,x
t
] + b
C
)
C
t
= f
t
∗ C
t−1
+ i
t
∗
e
C
t
o
t
= σ(W
o
· [h
t−1
,x
t
] + b
o
)
h
t
= o
t
∗ tanh(C
t
)
(22)
LSTM units contain a set of (learnable) gates that are
used to control the stages when information enters the
cell (input gate: i
t
), when it is output (output gate:
o
t
) and when it is forgotten (forget gate: f
t
) as seen
in Equation (22). This architecture allows the neural
network to learn longer-term dependencies because it
learn also how to incorporate an additional informa-
tion channel C
t
. In Figure 3 yellow rectangles rep-
resent a neural network layer, circles are point-wise
operations and arrows denote the flow of data. Lines
merging denote concatenation (notation of [] in Equa-
tion (22)), while a line forking denote its content be-
ing copied and the copies going to different locations.
For autoregressive modeling of time-series data,
RNN with LSTM cells is widely adopted (Hu et al.,
2018; Ketyk
´
o et al., 2019).
3.2 2-Stage Recurrent Neural
Network-based Domain Divergence
Metric
Similarly to ADAN (Farshchian et al., 2019), we build
a source data-absent, probability-based divergence
metric on the validation loss of the source model to
measure domain shifts. In ADAN, the distribution of
the residual loss (of the AE) is incorporated to express
On the Metrics and Adaptation Methods for Domain Divergences of sEMG-based Gesture Recognition
127
𝑥
𝑡
′
𝑥
2
′
𝑥
1
′
𝑥
0
′
…
ℎ
𝑡
𝒢-softmax
LSTM
LSTM
LSTM
LSTM
LSTM
LSTM
LSTM
LSTM
𝑥
𝒕
DA
𝑥
𝒕
′
1
2
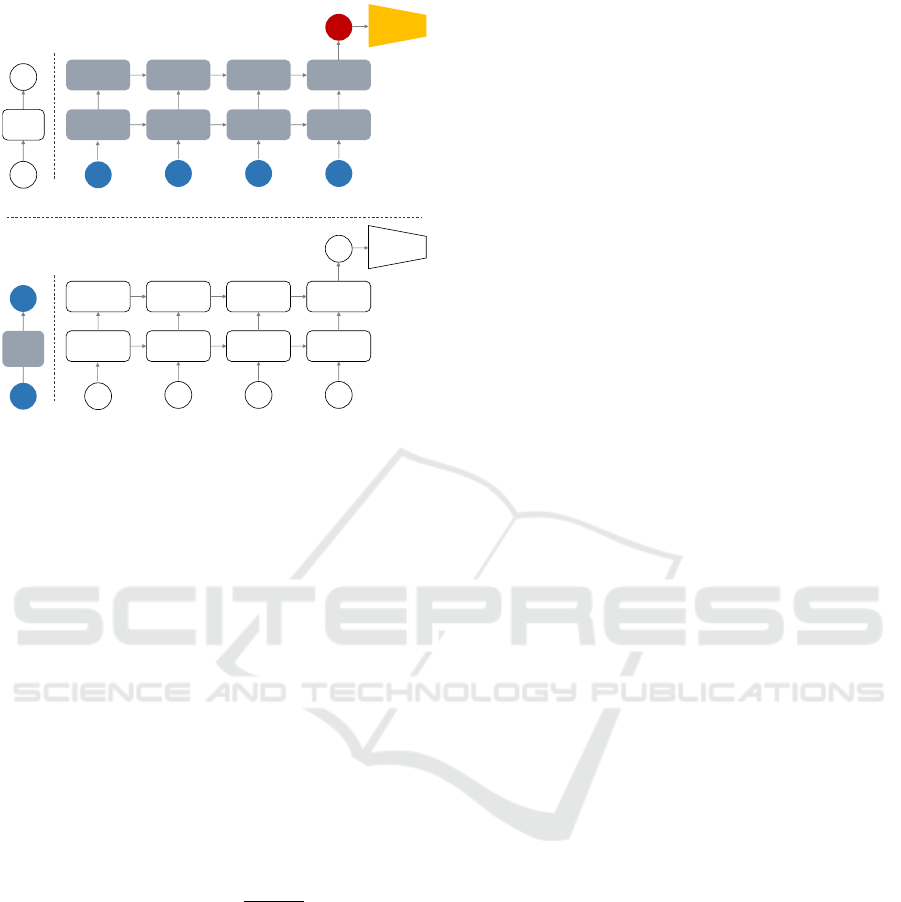
Figure 4: The 2SRNN architecture: 1) DA component,
2) Sequence classifier.
the divergence of target distributions from the one of
source. However, we follow the transductive learn-
ing setting and directly take the (cross-entropy) loss
of the source classifier (exhibiting Equation (5)). Our
source classifier is a sequential model (i.e., built on
the autoregressive RNN architecture to have temporal
modeling capabilites). For this task, we utilise the se-
quence classifier of the 2SRNN architecture (Ketyk
´
o
et al., 2019).
The sequence classifier of 2SRNN (visualised as
block 2 in Figure 4) is a deep stacked RNN with
the many-to-one setup followed by a G-way fully-
connected layer (G is the number of gestures to be
recognized) and a softmax transformation at the out-
put. The sequence classifier is directly modeling the
conditional distribution of P(Y | X), where Y belongs
to a categorical distribution with G (gesture) classes.
Learning is via the categorical cross-entropy loss (of
the ground truth and the predicted Y ):
L
cross-entropy
= −
∑
g∈G
I
g
logP
Θ,g
, (23)
where I
g
is the indicator function whether class label
g is the correct classification for the given observation
and P
Θ,g
is the predicted probability that the observa-
tion is of class g.
For the divergence measure of distributions (be-
tween the source and target domains), we take the
categorical cross-entropy losses of the sequence clas-
sifier in the following way: the classifier is trained on
the source distribution then evaluated on a target one.
Hence, the resulting L
cross-entropy
expresses the domain
shift in the loss space of the two domains. The cross-
entropy between P
S
and P
T
:
H(P
S
,P
T
) = H(P
S
) + D
KL
(S||T ). (24)
The L
cross-entropy
expresses the empirical H(P
S
,P
T
) by
the model. A valid source classifier is expected to
model the source with the entropy of H(P
S
) ≈ 1/G, so
in fact the cross-entropy H(P
S
,P
T
) captures the actual
Kullback-Leibler divergence among P
S
and P
T
(Equa-
tion (13)).
Furthermore, let µ
S
and µ
T
be the corresponding
means of P
S
and P
T
. We measure the dissimilarity be-
tween these two distributions by a lower bound to the
Wasserstein distance (Equation (15)), provided by the
absolute value of the difference between the means
(Berthelot et al., 2017):
D
W
(P
S
,P
T
) ≥ |µ
S
− µ
T
|. (25)
The difference of the empirical means with the
L
cross-entropy
approximates Equation (25).
3.3 2-Stage Recurrent Neural
Network-based Domain Adaptation
We build a source data-absent, probability distribution
of L
cross-entropy
-driven DA. (Ketyk
´
o et al., 2019) imple-
ments a linear version (L-2SRNN), we extend it to a
deep, non-linear one, and name it the Deep 2SRNN
(D-2SRNN). Generally, the DA is applied to the input
of the sequence classifier at each timestamp t (visu-
alised as block 1 in Figure 4). L-2SRNN learns the
weights of a linear transformation:
x
0
t
= Mx
t
+ b. (26)
D-2SRNN learns the weights of chained non-linear
transformations:
x
0
t
= σ(M
2
· σ(M
1
x
t
+ b
1
) + b
2
). (27)
Figure 5 presents the two consecutive stages of the
DA process:
I) The DA component initially is the identity trans-
formation, and the weights of it are frozen. The
sequence classifier is trained from scratch on the
labelled source dataset.
II) The weights of the sequence classifier are frozen
and the DA component’s weights are trained on
a minor subset of the labelled target dataset:
L
cross-entropy
is backpropagated (Rumelhart et al.,
1986) to the DA component during the process.
Hence, the D
KL
(P
S
||P
T
) in Equation (24) or ex-
pressed via the D
W
(P
S
,P
T
) in Equation (25) gets
minimized.
4 RESULTS
We perform experiments to validate our divergence
metric and DA for sEMG-based gesture recognition in
case of inter-session and inter-subject scenarios. We
follow the exact same hyperparametrization and net-
work implementations as in (Ketyk
´
o et al., 2019). The
parameters M,M
1
,M
2
∈ R
f × f
in Equations (26) and
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
128
𝑥
𝑡
′
𝑥
2
′
𝑥
1
′
𝑥
0
′
…
ℎ
𝑡
𝒢-softmax
LSTM
LSTM
LSTM
LSTM
LSTM
LSTM
LSTM
LSTM
…
𝑥
𝒕
DA
𝑥
𝒕
′
trained
fixed
Stage I.: source classifier pre-training
fixed
trained
Stage II.: target domain adaptation
Figure 5: The 2SRNN method: I) Source classifier pre-
training, II) Domain adaptation.
(27), where f is equal to the size of the input features
(number of sEMG channels). The σ() non-linearity in
Equation (27) is the REctified Linear Unit (Nair and
Hinton, 2010).
For the sequence classifier we use a 2-stack RNN
with LSTM cells. Each LSTM cell has a dropout
with the probability of 0.5 and 512 hidden units. The
RNN is followed by a G-way fully-connected layer
with 512 units (dropout with a probability of 0.5) and
a softmax classifier. Adam (Kingma and Ba, 2014)
with the learning rate of 0.001 is used for the stochas-
tic gradient descent optimization. The size of the
DA component in both the linear and deep cases is
less than 1% of the total trainable network parame-
ters. The gesture recognition accuracy is calculated
as given below:
Classification Accuracy =
Correct
Total
∗ 100% (28)
We investigate the inter-session and inter-subject
divergences and validate our DA method on public
sparse and dense sEMG datasets. We follow the ex-
periment setups of previous works for comparabil-
ity. Since we do sequential modeling in all experi-
ments, we decompose the sEMG signals into small se-
quences using the sliding window strategy with over-
lapped windowing scheme. The sequence length must
be shorter than 300 ms to satisfy real-time usage con-
straints. To compare our current experiments with
previous works, we follow the segmentation strategy
in previous studies.
The dense-electrode sEMG CapgMyo dataset has
been thoroughly analysed by (Du et al., 2017; Hu
et al., 2018; Ketyk
´
o et al., 2019) such as the sparse-
electrode sEMG NinaPro dataset by (Patricia et al.,
2014; Du et al., 2017; Ketyk
´
o et al., 2019).
The CapgMyo dataset (Du et al., 2017): includes
HD-sEMG data for 128 electrode channels. The sam-
pling rate is 1 KHz:
1. DB-b: 8 isometric, isotonic hand gestures from
10 subjects in two recording sessions on different
days.
2. DB-c: 12 basic movements of the fingers were ob-
tained from 10 subjects.
We downloaded the pre-processed version from http:
//zju-capg.org/myo/data to work with the exact same
data as (Du et al., 2017; Ketyk
´
o et al., 2019) for fair
comparison. In that version, the power-line interfer-
ence was removed from the sEMG signals by using
a band-stop filter (45–55 Hz, second-order Butter-
worth). Only the static part of the movements was
kept in it (for each trial, the middle one-second win-
dow, 1000 frames of data). They used the middle,
one-second data to ensure that no transition move-
ments are included in it. We rescaled the data to have
zero mean and unit variance, then we rectified it and
applied smoothing (as low-pass filtering).
The NinaPro DB-1 dataset (Patricia et al., 2014)
contains sparse 10-channel sEMG recordings:
1. Gesture numbers 1–12: 12 basic movements of
the fingers (flexions and extensions). These are
equivalent to gestures in CapgMyo DB-c.
The data is recorded at a sampling rate of 100 Hz, us-
ing 10 sparsely located electrodes placed on subjects’
upper forearms. The sEMG signals were rectified
and smoothed by the acquisition device. We down-
loaded the version from http://zju-capg.org/myo/data/
ninapro-db1.zip to use the exact same data as (Du
et al., 2017; Ketyk
´
o et al., 2019) for fair comparison.
For each trial, we used the middle 1.5-second win-
dow, 180 frames of data to get the static part of the
gestures.
4.1 Divergence Metric Validation
We validate the proposed domain divergence metric
in Section 3.2 on the CapgMyo DB-b dataset which
covers both the inter-session and inter-subject scenar-
ios.
The divergence results are shown in Figure 6 and
Figure 7. In both figures the empirical distributions
of L
cross-entropy
are illustrated by their histograms and
mean values.
Figure 6 presents the inter-session and inter-
subject divergences before DA. The values with red
(µ
0
,µ
1
,µ
2
) represent the means of L
cross-entropy
; µ
0
is
On the Metrics and Adaptation Methods for Domain Divergences of sEMG-based Gesture Recognition
129

Figure 6: Histograms and mean values in case of the dif-
ferent domain shifts: histograms represent the distributions
cross-entropy loss of the classifier on validation data before
domain adaptation. The values with red (µ
0
,µ
1
,µ
2
) repre-
sent the means of validation loss; µ
0
is the low mean loss in
case of intra session; µ
1
and µ
2
(along with their histograms)
show high inter-session and inter-subject distribution diver-
gences.
Figure 7: Histograms and mean values in case of different
domain shifts and adaptation solutions: histograms repre-
sent the distributions of cross-entropy loss of the classifier
on validation data after domain adaptation. Intra session
statistics (µ
0
) represent the source distribution (towards the
divergent distributions are aimed to be adapted). The his-
tograms and corresponding mean values with gray (µ
L
1
,µ
L
2
)
represent the validation loss after linear domain adapta-
tion; the histograms and corresponding mean values with
green (µ
D
2
,µ
D
2
) represent the validation loss after deep do-
main adaptation.
Table 1: Inter-session recognition accuracy results on
CapgMyo DB-b.
pre-DA post-DA
AdaBN (Du et al., 2017) 47.9% 63.3%
L-2SRNN (Ketyk
´
o et al., 2019) 54.6% 83.8%
D-2SRNN 54.6% 85.9%
the low mean loss in case of intra session; µ
1
and µ
2
(along with their histograms) show high inter-session
and inter-subject domain shifts. µ
0
shows the power
of the sequence classifier: µ
0
= 0.17 is close to the
theoretical lower bound of cross-entropy which is
H(S) = 0.125 in the current case.
Figure 7 presents the inter-session and inter-
subject divergences after DA. Intra session statistics
(µ
0
) represent the source distribution (towards the di-
vergent distributions are aimed to be adapted). The
histograms and corresponding mean values with gray
(µ
L
1
,µ
L
2
) represent the validation loss after L-2SRNN
DA; the histograms and corresponding mean values
with green (µ
D
2
,µ
D
2
) represent the validation loss after
D-2SRNN DA. In all cases, the post-DA L
cross-entropy
distributions appear to be close to one of the source.
4.2 Domain Adaptation Validation
For comparison purposes, we take the exact same
pre-trained source classifiers from (Ketyk
´
o et al.,
2019) and perform D-2SRNN DA (described in Sec-
tion 3.3). The evaluation of the D-2SRNN DA is ex-
actly the same as of the L-2SRNN and the AdaBN
(Du et al., 2017) approaches. Furthermore, the com-
parison to the MKAL (Patricia et al., 2014) also is
exactly the same as in (Du et al., 2017; Ketyk
´
o et al.,
2019).
Table 1 presents the inter-session recognition ac-
curacy results on the dense CapgMyo DB-b dataset.
The L-2SRNN and D-2SRNN share the exact same
pre-trained source classifier models. The D-2SRNN
DA brings 57.3% improvement which is better by 2.1
percentage points than the L-2SRNN.
Table 2 shows the inter-subject recognition ac-
curacy results on the dense CapgMyo DB-b & DB-
c and the sparse NinaPro DB-1 datasets. The L-
2SRNN and D-2SRNN share the exact same pre-
trained source classifier models. The D-2SRNN DA
achieves: 74.9% improvement on the DB-b, 156.3%
improvement on the DB-c, 107.4% improvement on
the DB-1. The performance ratio (between the deep
and the linear solutions) is 3.4% in case of the dense
datasets, and 11.7% in case of the sparse one which
suggests that there is higher gain by non-linear adap-
tation in case of a sparse-electrode situation.
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
130
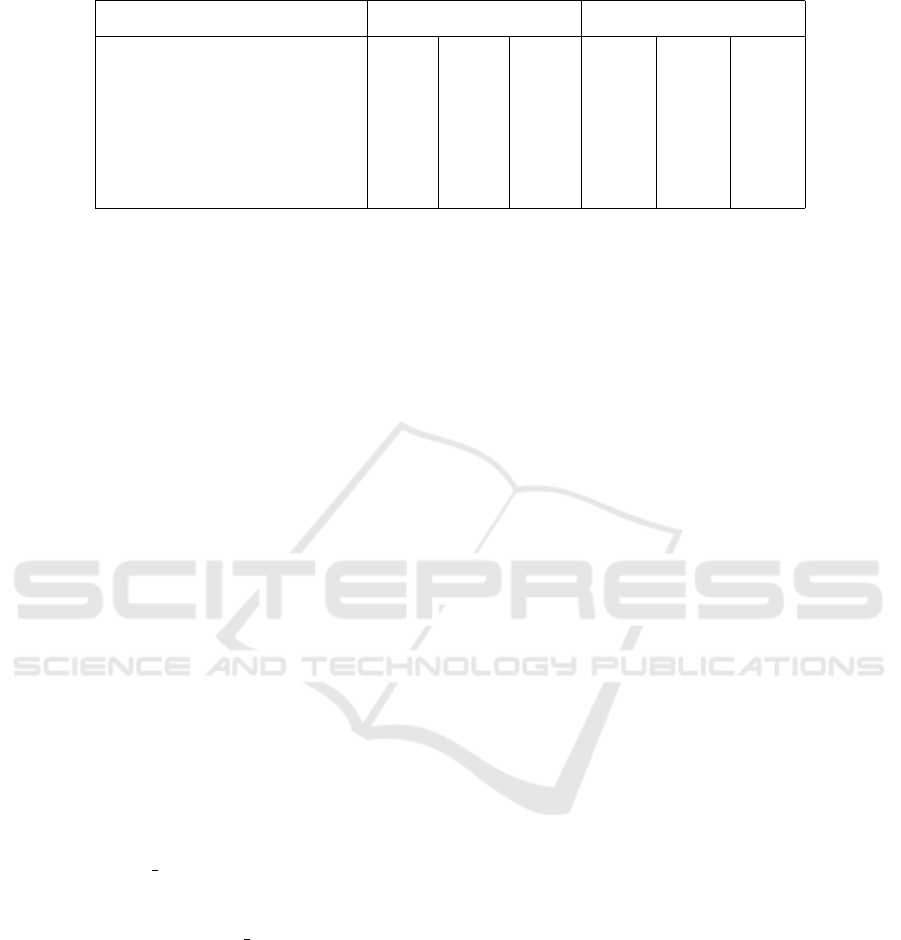
Table 2: Inter-subject recognition accuracy results on dense CapgMyo and sparse NinaPro datasets.
pre-DA post-DA
DB-b DB-c DB-1 DB-b DB-c DB-1
AdaBN (Du et al., 2017) 39.0% 26.3% - 55.3% 35.1% -
MKAL (Patricia et al., 2014) - - 30% - - 55%
L-2SRNN (Ketyk
´
o et al., 2019) 52.6% 34.8% 35.1% 89.9% 85.4% 65.2%
D-2SRNN 52.6% 34.8% 35.1% 92.0% 89.2% 72.8%
5 CONCLUSIONS
We showed that the divergences between the em-
pirical distributions of the cross-entropy losses by a
source classifier trained on the source distribution and
evaluated on the target one is a valid measure for the
domain shifts between source and target. It works
in the absence of source data and a domain adapta-
tion method built on minimizing that divergence is
an effective solution in the transductive learning set-
ting. Furthermore, we pointed out that this metric
and the corresponding adaptation method is applica-
ble to investigate and improve sEMG-based gesture
recognition performance in inter-session and inter-
subject scenarios under severe domain shifts. The
proposed deep/non-linear transformation component
enhances the performance of the 2SRNN architecture
especially in a sparse sEMG setting.
The code is available at https://github.com/ketyi/
Deep-2SRNN.
ACKNOWLEDGEMENTS
Project no. FIEK 16-1-2016-0007 has been imple-
mented with the support provided of the National Re-
search, Development and Innovation Fund of Hun-
gary, financed under the FIEK 16 funding scheme.
REFERENCES
Arjovsky, M., Chintala, S., and Bottou, L. (2017). Wasser-
stein generative adversarial networks. In Proceed-
ings of the 34th International Conference on Machine
Learning, volume 70, pages 214–223.
Ben-David, S., Blitzer, J., Crammer, K., Kulesza, A.,
Pereira, F., and Vaughan, J. W. (2010). A theory of
learning from different domains. Machine Learning,
79(1):151–175.
Ben-David, S., Blitzer, J., Crammer, K., and Pereira, F.
(2006). Analysis of representations for domain adap-
tation. In Proceedings of the 19th International Con-
ference on Neural Information Processing Systems,
NIPS’06, pages 137–144, Cambridge, MA, USA.
MIT Press.
Bengio, S., Vinyals, O., Jaitly, N., and Shazeer, N. (2015).
Scheduled sampling for sequence prediction with re-
current neural networks. In Cortes, C., Lawrence,
N. D., Lee, D. D., Sugiyama, M., and Garnett, R., edi-
tors, Advances in Neural Information Processing Sys-
tems 28, pages 1171–1179. Curran Associates, Inc.
Berthelot, D., Schumm, T., and Metz, L. (2017). BE-
GAN: Boundary Equilibrium Generative Adversarial
Networks. ArXiv, abs/1703.10717.
Chen, M., Xu, Z., Weinberger, K. Q., and Sha, F.
(2012). Marginalized denoising autoencoders for do-
main adaptation. In Proceedings of the 29th Interna-
tional Coference on International Conference on Ma-
chine Learning, ICML’12, pages 1627–1634, USA.
Omnipress.
Chidlovskii, B., Clinchant, S., and Csurka, G. (2016). Do-
main adaptation in the absence of source domain data.
In Proceedings of the 22Nd ACM SIGKDD Interna-
tional Conference on Knowledge Discovery and Data
Mining, KDD ’16, pages 451–460, New York, NY,
USA. ACM.
Clinchant, S., Csurka, G., and Chidlovskii, B. (2016). A do-
main adaptation regularization for denoising autoen-
coders. In Proceedings of the 54th Annual Meeting
of the Association for Computational Linguistics (Vol-
ume 2: Short Papers), pages 26–31, Berlin, Germany.
Association for Computational Linguistics.
Courty, N., Flamary, R., Tuia, D., and Rakotomamonjy,
A. (2016). Optimal transport for domain adaptation.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 39(9):1853–1865.
Cover, T. M. and Thomas, J. A. (1991). Elements of Infor-
mation Theory. Wiley-Interscience, New York, NY,
USA.
Craik, A., He, Y., and Contreras-Vidal, J. L. (2019). Deep
learning for electroencephalogram (EEG) classifica-
tion tasks: a review. Journal of Neural Engineering,
16(3):031001.
Csurka, G. (2017). Domain adaptation for visual
On the Metrics and Adaptation Methods for Domain Divergences of sEMG-based Gesture Recognition
131

applications: A comprehensive survey. CoRR,
abs/1702.05374.
Dose, H., Møller, J. S., Iversen, H. K., and Puthusserypady,
S. (2018). An end-to-end deep learning approach to
MI-EEG signal classification for BCIs. Expert Sys-
tems with Applications, 114:532 – 542.
Du, Y., Jin, W., Wei, W., Hu, Y., and Geng, W. (2017). Sur-
face EMG-based inter-session gesture recognition en-
hanced by deep domain adaptation. Sensors (Basel,
Switzerland), 17(3):458. 28245586[pmid].
Farshchian, A., Gallego, J. A., Cohen, J. P., Bengio, Y.,
Miller, L. E., and Solla, S. A. (2019). Adversarial do-
main adaptation for stable brain-machine interfaces.
In International Conference on Learning Representa-
tions.
Fernando, B., Habrard, A., Sebban, M., and Tuytelaars, T.
(2013). Unsupervised visual domain adaptation using
subspace alignment. In ICCV.
Ganin, Y., Ustinova, E., Ajakan, H., Germain, P.,
Larochelle, H., Laviolette, F., Marchand, M., and
Lempitsky, V. (2016). Domain-adversarial training of
neural networks. J. Mach. Learn. Res., 17(1):2096–
2030.
Ghahramani, Z. (2015). Probabilistic machine learning and
artificial intelligence. Nature, 521(7553):452–459.
Glorot, X., Bordes, A., and Bengio, Y. (2011). Domain
adaptation for large-scale sentiment classification: A
deep learning approach. In Getoor, L. and Scheffer,
T., editors, ICML, pages 513–520. Omnipress.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative Adversarial Nets. In Ad-
vances in Neural Information Processing Systems 27.
Hochreiter, S. and Schmidhuber, J. (1997). Long Short-
Term Memory. Neural Comput., 9(8):1735–1780.
Hu, Y., Wong, Y., Wei, W., Du, Y., Kankanhalli, M.,
and Geng, W. (2018). A novel attention-based hy-
brid CNN-RNN architecture for sEMG-based gesture
recognition. PLOS ONE, 13(10):1–18.
Ismail Fawaz, H., Forestier, G., Weber, J., Idoumghar, L.,
and Muller, P.-A. (2019). Deep learning for time series
classification: a review. Data Mining and Knowledge
Discovery, 33(4):917–963.
Jambukia, S. H., Dabhi, V. K., and Prajapati, H. B. (2015).
Classification of ECG signals using machine learning
techniques: A survey. In 2015 International Confer-
ence on Advances in Computer Engineering and Ap-
plications, pages 714–721.
Jordan, M. I. (1986). Attractor dynamics and parallelism
in a connectionist sequential machine. In Proceedings
of the Eighth Annual Conference of the Cognitive Sci-
ence Society, pages 531–546. Hillsdale, NJ: Erlbaum.
Ketyk
´
o, I., Kov
´
acs, F., and Varga, K. Z. (2019). Domain
adaptation for sEMG-based gesture recognition with
Recurrent Neural Networks. In 2019 International
Joint Conference on Neural Networks (IJCNN), pages
1–7.
Kifer, D., Ben-David, S., and Gehrke, J. (2004). Detecting
change in data streams. In Proceedings of the Thirtieth
International Conference on Very Large Data Bases -
Volume 30, VLDB ’04, pages 180–191. VLDB En-
dowment.
Kingma, D. P. and Ba, J. (2014). (adam): A
method for stochastic optimization. cite
arxiv:1412.6980Comment: Published as a con-
ference paper at the 3rd International Conference for
Learning Representations, San Diego, 2015.
Kouw, W. M. (2018). An introduction to domain adaptation
and transfer learning. CoRR, abs/1812.11806.
Kouw, W. M. and Loog, M. (2019). A review of
single-source unsupervised domain adaptation. CoRR,
abs/1901.05335.
Lin, J. (1991). Divergence measures based on the shannon
entropy. IEEE Transactions on Information Theory,
37(1):145–151.
Moreno-Torres, J. G., Raeder, T., Alaiz-Rodr
´
ıGuez, R.,
Chawla, N. V., and Herrera, F. (2012). A unify-
ing view on dataset shift in classification. Pattern
Recogn., 45(1):521–530.
Nair, V. and Hinton, G. E. (2010). Rectified linear units im-
prove restricted boltzmann machines. In Proceedings
of ICML’10, pages 807–814, USA.
Ng, A. Y. and Jordan, M. I. (2001). On discriminative
vs. generative classifiers: A comparison of logistic
regression and naive bayes. In Proceedings of the
14th International Conference on Neural Information
Processing Systems: Natural and Synthetic, NIPS’01,
pages 841–848, Cambridge, MA, USA. MIT Press.
Olah, C. (2015). Understanding LSTM Networks.
Pan, S. J. and Yang, Q. (2010). A survey on transfer learn-
ing. IEEE Transactions on Knowledge and Data En-
gineering, 22(10):1345–1359.
Pascanu, R., Mikolov, T., and Bengio, Y. (2013). On the dif-
ficulty of training recurrent neural networks. In Pro-
ceedings of ICML’13.
Patricia, N., Tommasi, T., and Caputo, B. (2014). Multi-
source Adaptive Learning for Fast Control of Pros-
thetics Hand. In Proceedings of the 22nd Inter-
national Conference on Pattern Recognition, pages
2769–2774. IEEE.
Rumelhart, D. E., Hinton, G. E., and Williams, R. J. (1986).
Parallel distributed processing: Explorations in the
microstructure of cognition, vol. 1. chapter Learning
Internal Representations by Error Propagation, pages
318–362. MIT Press, Cambridge, MA, USA.
Sun, B., Feng, J., and Saenko, K. (2016). Return of frustrat-
ingly easy domain adaptation. In AAAI.
van der Maaten, L., Chen, M., Tyree, S., and Wein-
berger, K. Q. (2014). Marginalizing corrupted fea-
tures. CoRR, abs/1402.7001.
Widmer, G. and Kubat, M. (1996). Learning in the presence
of concept drift and hidden contexts. Mach. Learn.,
23(1):69–101.
Zhao, J., Mathieu, M., and LeCun, Y. (2017). Energy-based
generative adversarial networks. ICLR 2017.
Zhu, J., Park, T., Isola, P., and Efros, A. A. (2017). Unpaired
image-to-image translation using cycle-consistent ad-
versarial networks. In 2017 IEEE International Con-
ference on Computer Vision (ICCV), pages 2242–
2251.
BIOSIGNALS 2020 - 13th International Conference on Bio-inspired Systems and Signal Processing
132
