
Cognitive and Social Aspects of Visualization in Algorithm Learning
Lud
ˇ
ek Ku
ˇ
cera
1,2
1
Faculty of Mathematics and Physics, Charles University, Prague, Czech Republic
2
Faculty of Information Technologies, Czech Technical University, Prague, Czech Republic
Keywords:
Visualization, Algorithm, Invariant, JavaScript, Computer-supported Education, Social Aspect.
Abstract:
The present paper tries to point out two aspects of the computer supported education at the university level.
The first aspect relates to cognition, in particular to methods of computer support of learning difficult concepts
in natural sciences, computer science, and engineering, like mathematical notions and theorems, physical laws,
and complex algorithms and their behavior.
The second aspect is social - only few papers describe how the new educational methods are or have been
accepted by the community, whether they finished as a single experiment at the authors’ institution or whether
they are used in other schools, how difficult is spreading them out and what kind of obstacles the authors meet.
We feel that even quite successful projects face certain inertia of the school system and the community of
teachers that make the wider use of new methods complicated.
1 INTRODUCTION
The present paper tries to point out two aspects of the
computer supported education at the university level
that are highly ignored in the mainstream of the field.
The first aspect relates to cognition, in particular
to methods of computer support of learning difficult
concepts in natural sciences, computer science, and
engineering, like mathematical notions and theorems,
physical laws, and complex algorithms and their be-
havior.
The second aspect is social - only few papers de-
scribe how new educational methods are or have been
accepted by the community, whether they finished
as a single experiment at the authors’ institution or
whether they are used in other schools.
1.1 Knowledge and Skills
The ways of supporting education by computers relate
closely to the type of education. The goal of education
can be defined as building knowledge and/or skills.
A skill is an ability to behave in certain way
to achieve required goals - e.g., manual skills in
medicine or social skills in management. Skills play
also very important role in arts.
For the purpose of the present paper, knowledge
is classified as soft and hard. We have no intension to
claim that one or the other type of knowledge is more
valuable.
One page of the proof of Farkas’ Lemma in the
Linear Programming Theory might take more time
the ten pages of a cardiology textbook, but no one
would claim that the mathematical knowledge is more
valuable than the medical one.
There is a very deep distinction between methods
of acquiring the soft and the hard knowledge that is
reflected in a rather pronounced way in methods of
computer support of such learnings.
Roughly speaking, the soft knowledge is often a
selection among possible worlds, based on a general
understanding of possibilities.
E.g., a heart is composed of several chambers, 2,
3, or 4. A cardiologist learns that a human hart has 4
chambers.
Examples of hard knowledge are abundant espe-
cially in natural sciences and engineering: e.g., prin-
ciples of magnetic resonance methods, quantum en-
tanglement, properties of smooth differentiability of
manifolds, and many others.
In its extreme form, acquiring hard knowledge is
trying to grasp the essence of one single situation,
which has no reflection in the previous learner’s ex-
perience. This implies that acquiring hard knowledge
is strictly different from acquiring the soft one.
Acquiring hard knowledge is a very important
(perhaps principal) part of education in many fields of
mathematics, computer science and natural sciences,
270
Ku
ˇ
cera, L.
Cognitive and Social Aspects of Visualization in Algorithm Learning.
DOI: 10.5220/0009359102700277
In Proceedings of the 12th International Conference on Computer Supported Education (CSEDU 2020) - Volume 2, pages 270-277
ISBN: 978-989-758-417-6
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

but the inspection of the past years of CSEDU shows
there is practically no overlap with the research inter-
ests of the CSEDU community.
It seems that the main reason is sociological and
will be discussed later; the goal of the first part of the
present paper is to induce interest of the community
in the exciting and important field of finding methods
of computer support (usually visualization) for hard
knowledge learning.
1.1.1 Skills
There are many ways of computer support of manual
skill acquiring: videos showing proper ways of exe-
cution of desired operation, assembly, or other type of
manual activity; advanced computer games - e.g., the
paper Snyder et al. (2019) describes a serious game
RealTeeth, where dentistry students face virtual pa-
tients.
There are publications developing skills that aim
at a general evolution of personality of younger chil-
dren, e.g., Homanova and Havlaskova (2019).
Learning languages can also be classified as devel-
oping skills, with numerous articles describing vari-
ous systems of language learning computer support.
Building social skills can highly benefit from us-
ing information technology. It is very frequent to use
electronic communication means to support commu-
nication among students in a group.
1.1.2 Soft Knowledge
The mainstream of the results in computer support
of education deals with building certain kinds of soft
knowledge. It is out of the scope of the present paper
to give a full review of different approaches that have
been published in the literature.
1.1.3 Hard Knowledge
The literature about ways of computer support of hard
knowledge acquiring is rather limited. We have found
no practically result of this type in the recent CSEDU
publications.
One of the reason why such results are so rare is
sociological and will be discussed later. Another pos-
sible reason is that methods of supporting skills and
soft knowledge learning systems are typically very
general, while a hard knowledge system is usually
directed to a single topic in a given narrow and ad-
vanced field, and using an ad hoc approach that can
hardly be generalized.
Most of approaches widely used to support skills
and soft knowledge learning cannot be used in the
case of hard knowledge. Learning hard knowledge is
a single person activity, we are not aware of any sys-
tem that would use student collaboration to learn, e.g.,
the duality theorem of Linear Programming. Gaming
approach has also a very limited use.
We see the only way to use computers to support
hard knowledge learning - the method can be formu-
lated in a simple way, but its implementation is usu-
ally extremely difficult: transform a mental process
that had lead the discoverer of a theorem, law, or an
algorithm to his discovery into a visual form that can
be shown in the computer screen.
It is important to note that this does not mean cre-
ating a visual representation of the publication de-
scription of the result; it is crucial that the discoverer’s
intuition and the ideas that are behind the discovery
are visualized in some form.
Nothing general can be said about the process,
each particular theorem, natural law or algorithm has
its own intellectual story, and it seems impossible to
find any common feature that could be used to build a
more universal system.
2 PRINCIPLES OF SUPPORT OF
HARD KNOWLEDGE
LEARNING BY
VISUALIZATION
During the prenatal phase of a new human being, she
or she follows in some sense stages of development
of the mankind during past hundreds of thousands of
years. Similarly, when a learner tries to understand
difficult concept, she or he has to follow in a certain
way the mental process that has led to the discovery of
the concept. As a conclusion, a computer support of
such a learning process should help a student to find
and follow such a process.
The absence of such a feature is very frequent
source of a failure of a computer supporting system.
When a path leading to a discovery (which might
be a new mathematical theorem, computational algo-
rithm, or a newly formulated law of physics) has been
found, looking back to a series of failed attempts and
dead ends usually discloses that the path can be im-
proved, made shorter, the proof of the theorem made
simpler, certain unnecessary computations of an algo-
rithm eliminated, the evidence of a physical law made
more convincing.
A sometimes long series of improvements eventu-
ally gives a publication form of the description of the
new discovery which, quite often, is dead in the sense
that almost all traces of the intuition that lead to the
discovery are hidden and invisible. Mechanical ver-
Cognitive and Social Aspects of Visualization in Algorithm Learning
271

ification of statements demonstrating the correctness
can show that the result is valid, but it does not give
the true understanding.
An expert in the field usually shares at least a part
of the intuition of the discoverer, and is able to see the
full landscape of a new discovery when given just few
hints and the static description involved in the publi-
cation text.
However, a novice in the field must be guided and
the path that lead to the discovery and the discov-
erer’s view of the problem must be at least partially
disclosed to a learner to give her or him the full, flex-
ible and long lasting knowledge.
Quite often, the discoverer’s intuition has a form
of images - sometimes mental images, in other cases
drawings on pieces of paper (or in sand in the case
of Archimedes). An author of a computer support-
ing system has to collect such images or to infer how
they could have looked, and then put them into screen.
Once again, let us note that only a small part of such
visual ideas eventually appear in the final publication.
3 ALGORITHM LEARNING
3.1 Invariant Visualization
In this paper, hard knowledge learning is exemplified
in the field of algorithm learning by a system of visu-
alizations called Algovision algovision (2020). Some
of algorithms are quite complicated and a lot of men-
tal energy is necessary to understand them properly.
The field of algorithms has one specific feature
that simplifies our attempts to illustrate not only how
the algorithm works, but also why it has been designed
in the present form, and why the algorithm fulfills its
task correctly.
In the case of a more complicated algorithm, it is
necessary to prove its correctness, i.e., to show that
it is able to achieve the desired output or result in all
cases. Our need for such proofs in not only the philo-
sophical one (in such a case we speak about Program
Correctness Theory), but also the practical one - we
have to give a guarantee that a real computer program
is ready for practical use (in such a case we speak
about Software Verification).
However, the underlying method is the same in
both cases: we have to find an invariant of the algo-
rithm - a logical statement such that
• it is verified at the beginning of the computation
under assumption the a valid input data were pro-
vided;
• the invariant together with conditions that induce
the end of the computation imply that the final re-
sult verifies all required conditions; and
• no single step of the computation violates the va-
lidity of the invariant.
Checking that an invariant of a given algorithm
satisfies all the above requirements is sometimes very
time consuming, but mechanical task. Some au-
tomatic software verification systems perform such
checks automatically.
However, finding a full collection of invariants of
a given algorithm is a task that is far from being me-
chanical (it is possible to prove that finding an invari-
ant of a given algorithm is not an algorithmically solv-
able problem). The only way to such a statement is
using the discoverer’s intuition and understanding the
problem, as it has been discussed above.
We strongly believe (and share this belief with
many computer scientists) that knowing the invari-
ant is equivalent to understanding the algorithm. The
one who understands the algorithm knows internal re-
lations among variables of the program, and simply
writes them down to get the desired invariant. On the
other hand, the invariant simply writes what are our
goals in the actions the algorithm does, and this im-
plies the understanding of the method.
If we accept the postulate that the algorithm un-
derstanding is equivalent to the knowledge of the al-
gorithm invariant, educational algorithm visualization
becomes easier. The goal is not only to visualize the
data and to show them changing, but we have to ar-
range the data and possibly add some other visual ob-
jects to visualize the invariant(s). Since it often hap-
pens that relatively similar algorithms have quite dif-
ferent invariants (e.g., the shortest path algorithms of
Dijkstra and Bellman-Ford, see below), there is no
general method of visualizing algorithm invariants,
and any such animation is unique and incomparable
with the others.
3.2 Case Studies
The next subsections describe some of the visualiza-
tions of our system, pointing out the invariants and/or
ideas that support efficient and easier learning of the
corresponding computational method.
3.2.1 Binomial Heap
The main idea of the binomial heap Vuillemin (1978)
is that it closely follows addition of binary numbers,
where “1” in the k-th column is represented by a tree
with 2
k
nodes. Visualization of the binomial heap
data structure can be found, e.g., at Galles (2020a),
CSEDU 2020 - 12th International Conference on Computer Supported Education
272

Figure 1: Binomial heap join as a binary number addition.
but only Algovision suggests immediately in a clear
way the correspondence with the original idea of J.
Vuillemin, see Fig. 1, where binary addition is pre-
sented in the background.
3.2.2 Fibonacci Heap
Visualization of the Fibonacci heap data structure
Fredman and Tarjan (1987) can be found, e.g., at
Galles (2020c). A student familiar with a binomial
heap has usually no problems with operations.
However, the form of Fibonacci heap trees is vari-
able, and the main property of the heap that a student
should learn in order to fully understand the heap and
the reason why it was invented is that a tree with large
root degree d must be large (in fact, the minimum size
of such a tree is F
d
, the d-th Fibonacci number - this
explains the name of the heap).
No attempt to illustrate this implication is made in
the above cited visualizations. On the other hand, the
principal part of our visualization is a series of play
scenes, where a student is given a sequence of tasks to
build trees of the form that appears in the background.
The tasks gradually lead a student to a surprising con-
clusion that is possible to build a large tree with a
small root degree, but not a small tree with a large
root degree.
Thus, in certain situations, a play-to-learn concept
can be used for hard knowledge acquiring as well.
3.2.3 Shortest Path Algorithms
Shortest path algorithms are usually the most ad-
vanced topic that is explained in a generic Algorithm
and Data Structure course at Computer Science de-
partments of Engineering Schools. Two of the main
algorithms of the class are algorithms of Dijkstra and
Bellman-Ford. They are very similar, the only dif-
ference being that the former uses a priority queue
to store open nodes of a graph, and requires non-
negative lengths of edges, while the other uses a sim-
ple queue and has no restrictions to edge labeling.
Since they are so similar, their visualizations
available on the web (e.g., Makohon et al. (2016);
Galles (2020b) as a selection of very large choice)
Figure 2: Dijkstra’s algorithm with horizontally moving
nodes.
look very similar as well. And this is wrong from the
point of view of understanding their behaviors that are
very different and this behavioral difference is what a
student has to know in order to understand well the
topic.
The background understanding of the algorithms
dictates two different visualization methods in our
collection:
In the Dijkstra visualization, nodes “slide” hori-
zontally and the x-coordinate of their location is pro-
portional to the estimation of their distance from the
origin, which is continuously upgraded by the algo-
rithm, see Fig. 2 (where nodes in a cluster near the
right side of the window are assumed to be yet in the
infinite distance from the origin).
This arrangement is one of the most successful
applications of the rule that important values should
not be visualized as numbers (as it is done in the im-
plementations cited above), but by some geometrical
property (e.g., the height of a column, the width or the
shape of a certain visual object, or the location as in
the present case).
In a preliminary experiment with 14 students 2
weeks before Dijkstra’s algorithm was read in their
Algorithms and Data Structure class, a generic ani-
mation as cited above has been shown first, followed
by our dynamic visualization.
The general comparison score average from the
range 1-10, where
“1=without dynamic visualization, I would have no
idea how it works”; and
10=“the dynamic version did not help at all”;
was 1.76 (including one student that admitted to give
a bad score because he knew the algorithm from his
high school), which we view as a confirmation of our
design philosophy.
A new experiment with larger group of students
and electronic collection of their answers is prepared
for February 2020, and the results will be reported in
the full version of the paper.
On the other hand, our visualization of the Bell-
Cognitive and Social Aspects of Visualization in Algorithm Learning
273
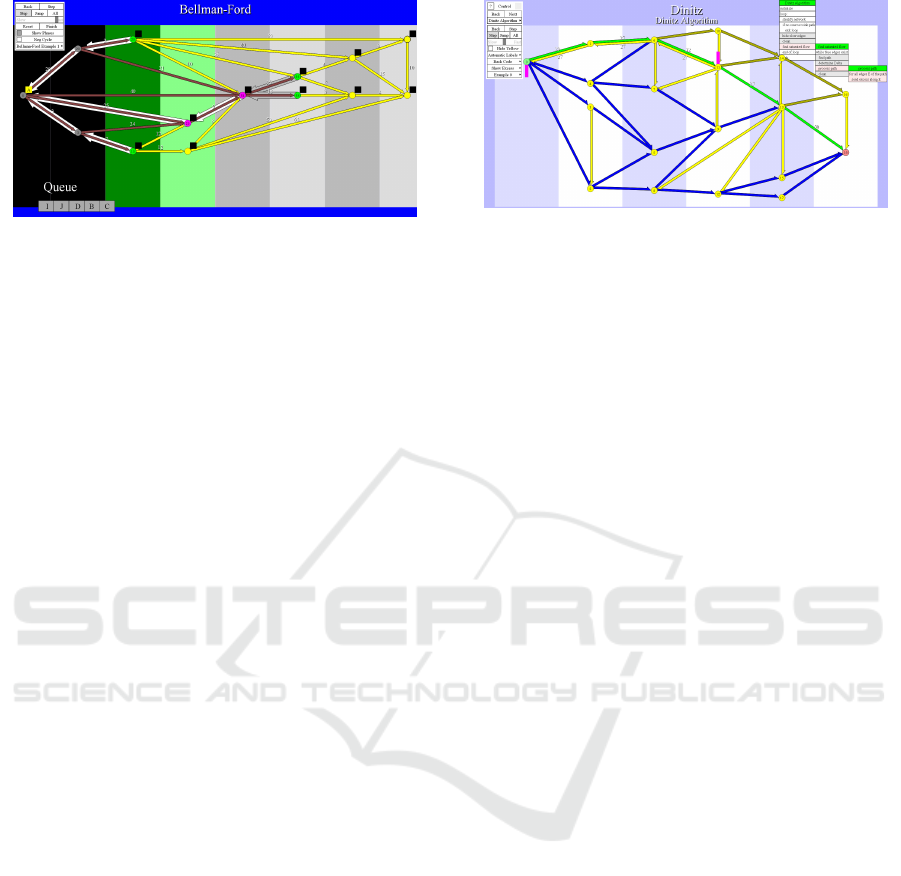
Figure 3: Bellman-Ford algorithm with phases.
man Ford algorithm is of the type “If I knew it, I
would not . . .”. After the computation is finished,
possibly without animation, nodes are partitioned ac-
cording to their distance from the origin in the tree
of shortest paths (represented by the wide white or
gray right-to-left oriented arrows behind the yellow
or brown edges of the original graph), see Fig. 3.
Unlike with the Dijkstra’s algorithm, in the
method of Bellman and Ford an already closed ver-
tex could be reopened when its estimation of the dis-
tance from origin changes, and all work previously
done with the work is invalidated. This makes the
time analysis of the algorithm especially involved.
In our representation, a student clearly sees that
• the black area on the left is already “dead”, all
variables have their final values and no activity oc-
curs;
• the nodes in the dark green layer have their final
values that are propagated to the light green layer;
and
• any other activity is useless, because it will later
be invalidated, when the corresponding nodes are
reopened (but we see it only now, after the whole
computation has been finished and is only back-
analyzed).
The visualization clearly shows that in all cases
(if no negative cycle is present) there is always some
activity that pushes the computation to the end after
finishing at most as many phases as is the number of
nodes.
The standard visualizations, e.g., those cited
above, give no hint to the time analysis of the
Bellman-Ford algorithm.
3.2.4 Network Flows: Dinitz Type Algorithms
The first algorithm to find the maximum flow in a net-
work is due to Ford and Fulkerson Ford and Fulkerson
(1956). Its main problem is that its computation might
take long time that cannot be limited by any function
of the number of vertices and edges of the network,
Figure 4: Dinitz network flow algorithm with layered net-
work.
but it depends only of the relation of the capacities of
edges.
In the Ford-Fulkerson algorithm, generalized
edges that can be used to build flow-augmenting
paths, are both eliminated and reopened during the
computation, which causes sometimes very long com-
putation.
An improved version of the algorithm, discov-
ered simultaneously in Dinitz (1970) and Edmonds
and Karp (1972), is an implementation of the Ford-
Fulkerson algorithm, when a flow augmenting path
selected by the algorithm must always have the small-
est possible number of edges.
The fact that this simple enhancement guarantees
fast computation could seem to be a mystery, unless
the visual representation of the graph is changed to
show layers (defined by the length of the shortest path
from the network source), see Fig. 4.
It is easy to see in this representation left-to-right
oriented edges that may be used by the Dinitz algo-
rithm are blue or green (the green ones forming a par-
ticular augmenting path), the yellow edges are not on
any shortest source-to-sink path and hence should not
be used.
The picture clearly shows that each time an aug-
menting path is processed, at least one blue edge dis-
appears, while the edges that are reopened are the
opposites of blue edges, thus being oriented right-to-
left, not belonging to any shortest source-sink path at
the moment, and hence forbidden by the Dinitz algo-
rithm.
This is how our visualization makes it obvious that
the Dinitz algorithm approaches the end of the com-
putation in a very straightforward manner. No such
hints can be found in visualization that are published
in the web.
3.2.5 Fast Fourier Transform
FFT (Fast Fourier Transform) is an efficient algorithm
for computing the discrete version of the Fourier
Transform, a useful tool for spectral analysis of digital
CSEDU 2020 - 12th International Conference on Computer Supported Education
274
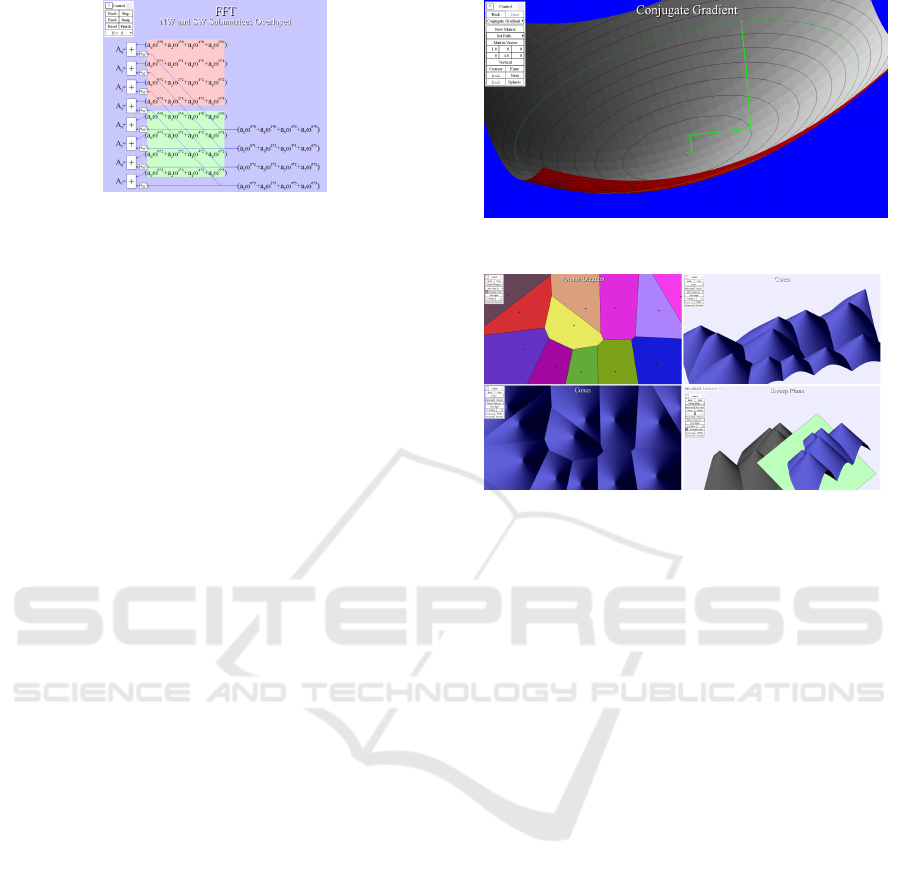
Figure 5: Explaining the FFT algorithm.
signals, data compression and other applications.
Our experience showed that high proportion of
students understood the method as the application of
the divide-and-conquer principle: partition the prob-
lem to two subproblems, solve them recursively, and
combined together.
In fact, the divide-and-conquer paradigm is really
used, but, since the matrix of the problem is two-
dimensional, there are four subproblems to be solved,
and the essence of the FFT analysis is that that there
are two pairs of identical subproblems.
This is one of our most successful visualizations,
because student examinations clearly showed a sub-
stantial drop of the percentage of students that misun-
derstood the FFT method in the way described above.
3.2.6 Conjugate Gradient Method
The CGM (Conjugate Gradient Method, Hestenes and
Stiefel (1952)) is the fundamental method of Numer-
ical Linear Algebra. The CGM and its more advance
variants (e.g., BiCGstab) are used in many applica-
tions like CFD (Computational Fluid Dynamic, which
covers virtual wind tunnels to test aerodynamics in
automotive and aerospace industry).
The problem of numerical solving systems of par-
tial differential equations that arise in physics and en-
gineering is reduced to sparse systems of linear equa-
tions, which in turn are solved as finding the mini-
mum of a quadratic functional given by the matrix of
the system. In Fig. 6 shows the situation in the 2-
dimensional case. The solution of the problem, repre-
sented by the red point at the bottom of the surface
is unknown, can be found by the Steepest Descent
method, which, however, needs many zig-zag itera-
tion.
The essence of the CGM Method is to shrink the
surface so that the horizontal elliptic contour lines be-
come circles. Then, the minimum is found as one it-
eration of the steepest descent.
Our experience shows that after having seen the
compression visualization of the notion of the con-
jugated gradient, students exhibit much better under-
standing of the CGM and higher flexibility that makes
Figure 6: Steepest descent minimum finding.
Figure 7: Voronoi diagram.
them better prepared for applications of the CGM as
well as learning CGM generalizations.
3.2.7 Voronoi Diagram
With reference to Fig. 7, NW corner, given a finite
set of points of the plane (called sites, black dots
in the figure), we have to partition the plane so that
monochromatic areas around each site are collections
of all points of the plane, for which the site in the area
is the nearest site. The partition is called a Voronoi
diagram or a Dirichlet tessellation of the set of sites
(Dirichlet (1850); Voronoi (1908)).
Our visualization explains an elegant algorithm
due to Steve Fortune Fortune (1987). The key point
to understanding the algorithm is to imagine the plane
with sites inserted as a horizontal plane into the 3D
space; for each site, we also create a cone with its
summit in the site. A view of the obtained surface in
a general direction is in Fig. 7, NE corner. However,
if observed vertically, see Fig. 7, SW corner, the in-
tersections of cones reveal the boundary lines of the
Voronoi diagram.
The algorithm itself works by sweeping the moun-
tains of cones by an inclined plane (Fig. 7, SE corner).
The animation is one of the best examples of “Oh, I
see” visualization: with only a slight exaggeration,
since the moment students see the scene of the plane
sweeping the cones, most of them would be able to
write the corresponding program by themselves.
Cognitive and Social Aspects of Visualization in Algorithm Learning
275
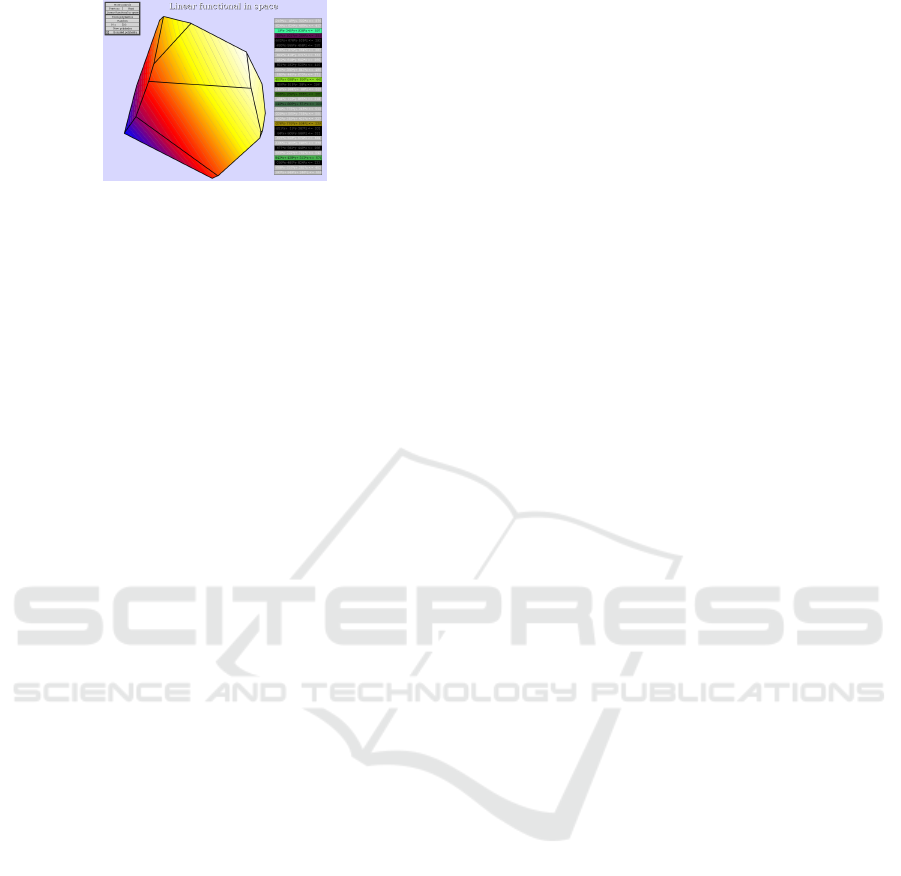
Figure 8: Simplex algorithm of Linear Programming in 3D.
3.2.8 Simplex Algorithm
The simplex algorithm, the oldest algorithm of Lin-
ear Programming, is still used frequently in practice.
For the history of the algorithm, see, e.g., Simplex
(2020). The way it is taught (especially outside Com-
puter Science, e.g., in schools of economy) is often
very formal and students just memorize certain com-
putational steps without having any understanding of
the principles of the method.
However, the problem and the algorithm have a
natural geometrical representation: the set of linear
inequalities defines a polytope in a space (see Fig. 8
taken from Algovision) A teacher or a learner can ro-
tate the polytope to see it from all directions. The
linear functional to be optimized is represented us-
ing colors of hot iron: dark blue for low values, light
yellow to white for high values. And the idea of the
simplex algorithm is to find the hottest tip of the poly-
tope.
4 SOCIAL ASPECTS OF
COMPUTER SUPPORT OF
ALGORITHM LEARNING
A typical article in the field of computer-supported
education presents motivation, a description of a par-
ticular supporting system, and a single example of us-
ing the system in education. This suggests that the
system has been used just in a single occasion by the
authors and no attempt was made to offer the system
to other educational institutions. Or, if the system is
successfully used in several schools, the social aspects
of the dissemination process are not mentioned.
It would also be interesting to know the distri-
bution of the expertise in the team of authors - such
an information might be valuable for those that start
working in the area of computed supported education
(and for experienced researchers as well).
4.1 The Golden Age of Algorithm
Animation and Its Decline
The temporal nature of algorithms immediately calls
for animated visualization. It was believed that the
universal paradigm is quite simple: take a static rep-
resentation of the background object of an algorithm
(usually a graph drawn in a textbook form or a se-
quence of numbers represented by columns of differ-
ent heights), and update them periodically as they are
updated by the algorithm. A continuous or step-by-
step update of the visual information is controlled in
a way that is well-known from programming develop-
ment system, when the option of interrupted “execu-
tion” of a program is used for debugging.
Some time ago, I had arrived to Pittsburgh the day
when Steelers played the Super-bowl final, and it was
my strict obligation to see the match. Having no idea
of rules of football, I was even unable to figure out
who was winning (or how it happened that Steelers
won).
Unfortunately, the same situation occurred with
algorithm animations created using the above ap-
proach. A person with previous knowledge of an al-
gorithm was able to see clearly the progress of the
computation, but a novice student saw just a picture
changing in a messy and incomprehensible way, be-
ing usually unable to figure out what is going on.
The situation about 12 years ago was best charac-
terized by an article bassat Levy and Ben-Ari (2007)
with the title “We work so hard and they don’t use it:
acceptance of software tools by teachers”. Hardwork-
ing researchers were the authors of algorithm anima-
tions, “they” were teachers of algorithms at computer
science departments.
At the present time, the activity in algorithm ani-
mation and visualization has almost stopped; they are
certain sites that are mentioned in references that are
sometimes used as an illustration of algorithms, but
their use in the mainstream computer science teach-
ing is limited.
4.2 How to Offer a
Computer-supported Educational
System to Colleagues
With respect to the previous section, our experience is
rather different.
We have very good experience with accepting our
visualizations both by students and teachers. This
year, almost one third of computer science majors in
the first year of their study at our university are taking
a facultative course based on Algovision in parallel
CSEDU 2020 - 12th International Conference on Computer Supported Education
276

with the standard and obligatory Algorithm and Data
Structure course using pdf slides.
While our colleagues from our university or even
abroad (including Stasko (2019)) are also quite en-
thusiastic with the way visualization of algorithms
and their background ideas makes learning easier and
more efficient, when confronted with an offer to use
the visualization in their standard course, it seems that
they don’t hear a friendly offer, but they feel to be said
in a harsh voice “Hey, throw your stupid slides out of
window; what we offer is much better that you would
ever be able to do by yourself”.
Well, this is highly exaggerated, but if we try
to understand the point of view of an experienced
teacher with carefully prepared slides, who success-
fully teaches Algorithms and Data Structures already
for many years, we understand that it is in fact very
impolite and aggressive to try to make him or her to
throw away all his or her experience and to switch to
a completely different method.
The present paper has been prepared in a typeset-
ting system T
E
X. In one interview, its author, Don-
ald Knuth, mentioned his meeting with an owner of
a small publishing house, specialized in fine typeset-
ting of mathematical books and journals. The pub-
lisher asked Knuth not to disseminate T
E
Xanymore,
because the system was destroying his tool of making
money to live. We are afraid that the reason why we
work so hard and they are not using it is very similar.
REFERENCES
algovision (2020). www.algovision.org, the main reference
to the visualization system presented in the paper.
bassat Levy, R. B. and Ben-Ari, M. (2007). We work so hard
and they don’t use it: acceptance of software tools by
teachers. In ITiCSE ’07: Proc. of 12th SIGCSE Conf.
on Innov. and Technol. in CS education, Dundee, Scot-
land. ACM Press.
Dinitz, Y. (1970). Algorithm for solution of a problem of
maximum flow in a network with power estimations.
Dokl. Ak. Nauk SSSR, 11:1277–1280.
Dirichlet, G. L. (1850).
¨
Uber die reduktion der positiven
quadratischen formen mit drei unbestimmten ganzen
zahlen. J. f
¨
ur die Reine und Angewandte Math.,
40:209–227.
Edmonds, J. and Karp, R. M. (1972). Theoretical improve-
ments in algorithmic efficiency for network flow prob-
lem. J. ACM, 19(2):248–264.
Ford, L. R. and Fulkerson, D. R. (1956). Maximal flow
through a network. Canadian J. Math., 8:399–404.
Fortune, S. (1987). A sweepline algorithm for voronoi dia-
grams. Algorithmica, 2:153–174.
Fredman, M. L. and Tarjan, R. E. (1987). Fibonacci heaps
and their uses in improved network optimization algo-
rithms. J. ACM, 34(3):596–615.
Galles, D. (2020a). www.cs.usfca.edu/∼galles/visualization/
binomialqueue.html.
Galles, D. (2020b). www.cs.usfca.edu/∼galles/visualization/
dijkstra.html.
Galles, D. (2020c). www.cs.usfca.edu/∼galles/visualization/
fibonacciheap.html.
Hestenes, M. R. and Stiefel, E. (1952). Methods of con-
jugate gradients for solving linear systems. J. Res.
National Bureau of Standards, 49(6):409.
Homanova, Z. and Havlaskova, T. (2019). Algorithmiza-
tion in a computer graphics environment. In CSEDU,
Heraklion, Crete, Greece, pages 466–473.
Makohon, I., Nguyen, D. T., Sosonkina, M., Shen, Y., and
Ng, M. (2016). Java based visualization and anima-
tion for teaching the dijkstra shortest path algorithm
in transportation networks. Int. J. Software Eng. &
Appl., 7(3):11–25.
Simplex (2020). en.wikipedia.org/wiki/simplex algorithm:
Simplex algorithm references.
Snyder, M., G
´
omez-Morantes, J., Parra, C., Carillo-Ramos,
A., Camacho, A., and Moreno, G. (2019). Devel-
opment of diagnostic skills in dentistry students us-
ing gamified virtual patients. In CSEDU, Heraklion,
Crete, Greece, pages 124–133.
Stasko, J. (2019). personal communication.
Voronoi, G. (1908). Nouvelles appliacations des param
`
etres
continus
`
a la the
´
eorie des formes quadratiques. J. f
¨
ur
die Reine und Angewandte Mathematik, 133:97–178.
Vuillemin, J. (1978). A data structure for manipulating pri-
ority queues. Comm. ACM, 21(4):309–315.
Cognitive and Social Aspects of Visualization in Algorithm Learning
277
