
Towards Multi-objective Optimisation of Quantitative Goal Models using
Constraint Programming
Christophe Ponsard
1
and Robert Darimont
2
1
CETIC Research Centre, Charleroi, Belgium
2
Respect-IT SA, Louvain-la-Neuve, Belgium
Keywords:
Multi-objective Optimisation, Goal-oriented Requirements Engineering, Search-based Software Engineering,
Quantitative Reasoning, Pareto Front, Tool Support.
Abstract:
Goal Model are widely used to capture system goals and refine them into operational requirements assigned
to human, hardware or software. Such models support alternative goal refinements resulting in a potentially
large design space to explore. A given design can be quantitatively evaluated in terms of its fulfilment of a
set of non-functional requirements (e.g. reliability, performance) or business goals (e.g. costs, stakeholder
satisfaction). Optimisation techniques can be used to explore the design space to determine an optimal design
according to a single objective like the cost but also according to multi-objective techniques to propose a set
of Pareto-optimal solutions in which a best solution can be selected. In this paper, we show how to translate
a goal-oriented requirements model, expressed in the KAOS notation, into a constraint programming (CP)
problem. The OscaR.CP engine is used to get, from all alternatives co explored, either global or Pareto-
optimal solutions. Our method is implemented as a tool plugin of a requirements engineering platform and is
benchmarked on the classical meeting scheduler case study.
1 INTRODUCTION
Requirements Engineering (RE) is concerned with
the elicitation, evaluation, specification, consolida-
tion, and evolution of the objectives, functionalities,
qualities, and constraints of a software-based system
(van Lamsweerde, 2009). It is a crucial phase as
many project failures can be traced back to flaws in re-
quirements. In addition to dealing with completeness
and consistency issues, RE also allows one to take
various high-level design decisions related to several
ways to reach the system goals using different com-
binations of software/hardware/human agents, gener-
ally also resulting in different trade-offs among Non-
Functional Requirements (NFR), i.e. qualities like
performance, usability or security. Such alternative
designs can be precisely modelled using Goal- Ori-
ented Requirements Engineering (GORE) notations
like KAOS (Dardenne et al., 1993), i* (Yu and My-
lopoulos, 1997) or GRL (ITU, 2012).
Complex systems can contain many alternatives
with various constraints restricting how they can be
combined and also complex impacts on different
kinds of properties, especially NFR. The process to
select an adequate design can actually be described
as an optimisation problem over the system design
space (Mogk, 2014). More precisely, it is a multi-
objective optimisation problem given the many, so
different qualities of a system needs to simultaneously
met. Translating such problems into a single optimi-
sation problem is not recommended because it is diffi-
cult to assess the relative importance of those qualities
and therefore to combine them into a unique objec-
tive function. An alternative approach is to compute a
set of solutions known as Pareto-optimal from which
trade-offs can be explicitly evaluated (Zhang et al.,
2008). Search-based software engineering (SBSE)
(Harman, 2007) is a specialised field of software en-
gineering concerned with the application of optimisa-
tion tools to this kind of problems. A famous one is
the Next Release Problem which is known to be NP-
Hard (Bagnall et al., 2001).
The aim of this paper is to explore how to use
SBSE to tackle the problem of alternative selections
in a multi-objective context by computing the Pareto
front containing all solutions explicitly. To support
this work, the KAOS notations have been used. How-
ever, the same concepts and methods can be applied to
the other GORE notations mentioned above. On the
SBSE side, we will consider the use of constraint pro-
286
Ponsard, C. and Darimont, R.
Towards Multi-objective Optimisation of Quantitative Goal Models using Constraint Programming.
DOI: 10.5220/0009357602860292
In Proceedings of the 9th International Conference on Operations Research and Enterprise Systems (ICORES 2020), pages 286-292
ISBN: 978-989-758-396-4; ISSN: 2184-4372
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

gramming, more specifically using the Open Source
OscaR library which provides, among others, power-
ful support to multi-objective problems (OscaR Team,
2012). In order to illustrate our approach, we have
focused on a well-known RE case study: the meet-
ing scheduler (van Lamsweerde et al., 1995) which
has already been used for multi-objective reasoning
(Nguyen et al., 2018).
Our paper is structured as follows. First, Section 1
reviews existing work in this area. Then Section 2
presents the goal modelling notation used here and il-
lustrates it on our meeting scheduler case study. Sec-
tion 3 details our mapping of the variability part of the
model into a CP model using OscaR.CP. Section 4 ex-
ploits the model to perform single and multi-objective
searches and illustrate the result on our case study. Fi-
nally, Section 5 concludes and identifies some future
work.
2 LITERATURE OVERVIEW
This section reviews different reported works investi-
gating the use of CP to reason about GORE models.
Looking at other standard goal modelling nota-
tions, GRL support quantitative reasoning, especially
through Key Performance Indicators (KPI) (Barone
et al., 2011). A mapping on constraint programming
was also developed using the JaCoP library (Luo and
Amyot, 2011). However the work is more directed to-
wards the definition of a better declarative semantics
of GRL. The exploitation seems limited to the propa-
gation on trees without alternatives designs and does
not investigate the possibility to explore the design
space as we do.
Related to i*, an extensive multi-objective frame-
work is available (Nguyen et al., 2018). It formalises
the notion of Constraint Goal Models (CGM) to sup-
ports different kinds of requirements (nice-to-have,
preferences, optimisation, constraints,..). It exploits
automated reasoning SMT-based solvers to support
sound and complete reasoning on such goal models.
An Eclipse-based CGM tool is available. However,
its optimisation capabilities are limited to a lexico-
graphic approach, i.e. with priority ranking among
goals. A special attention is devoted to ensuring the
reasoning scales on large models derived from the
meeting scheduler also used in our work.
Another tool called WebREd-Tool was developed
for the i* method (Aguilar et al., 2011; Calderon et al.,
2012). It is a set of Eclipse plugins assisting the de-
signer in the early phases of a Web application de-
velopment process. It helps the designer to compare
different configurations of functional requirements,
while balancing and optimising non-functional re-
quirements. The algorithm relies on Pareto efficiency
and provides both tabular and radar based visualisa-
tions. The algorithm itself does not seem efficient and
scalable as it explicitly stores all possible configura-
tions. However, the authors performed a controlled
experiment that confirm requirement engineers may
perform better at the task of selecting FRs while op-
timising and balancing NFRs using the proposed ap-
proach and visualisation (Zubcoff et al., 2018).
Feature models are quite close to goal models in
terms of structure, attributes, constraints. Complete
mapping of feature models over constraint logic pro-
gramming have been defined, e.g. (Karatas¸ et al.,
2010) and enable to perform operations such as prop-
agation, emptiness check or enumeration of products.
However, they do not relate to requirements and do no
answer the problem we tackle here.
Finally, another KAOS approach has been devel-
oped to deal with uncertainty in goals (Heaven and
Letier, 2011). It relies on a simulation approach us-
ing a genetic algorithm which also results in a multi-
objective analysis. This approach requires a more
complex modelling in which probability distributions
must be specified and is more computation intensive.
It can be seen as complementary to the present work
and can be used to introduce a more realistic goal
modelling.
3 GOAL MODELLING OF THE
MEETING SCHEDULER
Goals prescribe, at different levels of abstraction, key
properties the considered system should achieve. In
this paper, the focus is only put on modelling goals
although it is usually combined with other models to
structure the domain and agent interactions.
KAOS uses several abstraction levels to express
goals starting from high-level strategic goals. In
the meeting scheduler case study (van Lamsweerde
et al., 1995) used as running example, it can be a
goal like “Achieve[EfficientSchedulingOfMeetings]”
as depicted in Figure 1 as a light blue parallelograms.
In KAOS, high-level goals progressively refined into
more concrete and operational ones through refine-
ment relationships. A refinement relationship links
a parent goal to several subgoals with different ful-
filment conditions using either AND-refinement (all
subgoals need to be satisfied) or OR-refinement (a sin-
gle subgoal is enough, i.e. possible alternatives). The
“WHY” and “HOW” questions can be used to conve-
niently navigate from subgoals to parent goals (why)
and from parent goals to subgoals (how).
Towards Multi-objective Optimisation of Quantitative Goal Models using Constraint Programming
287
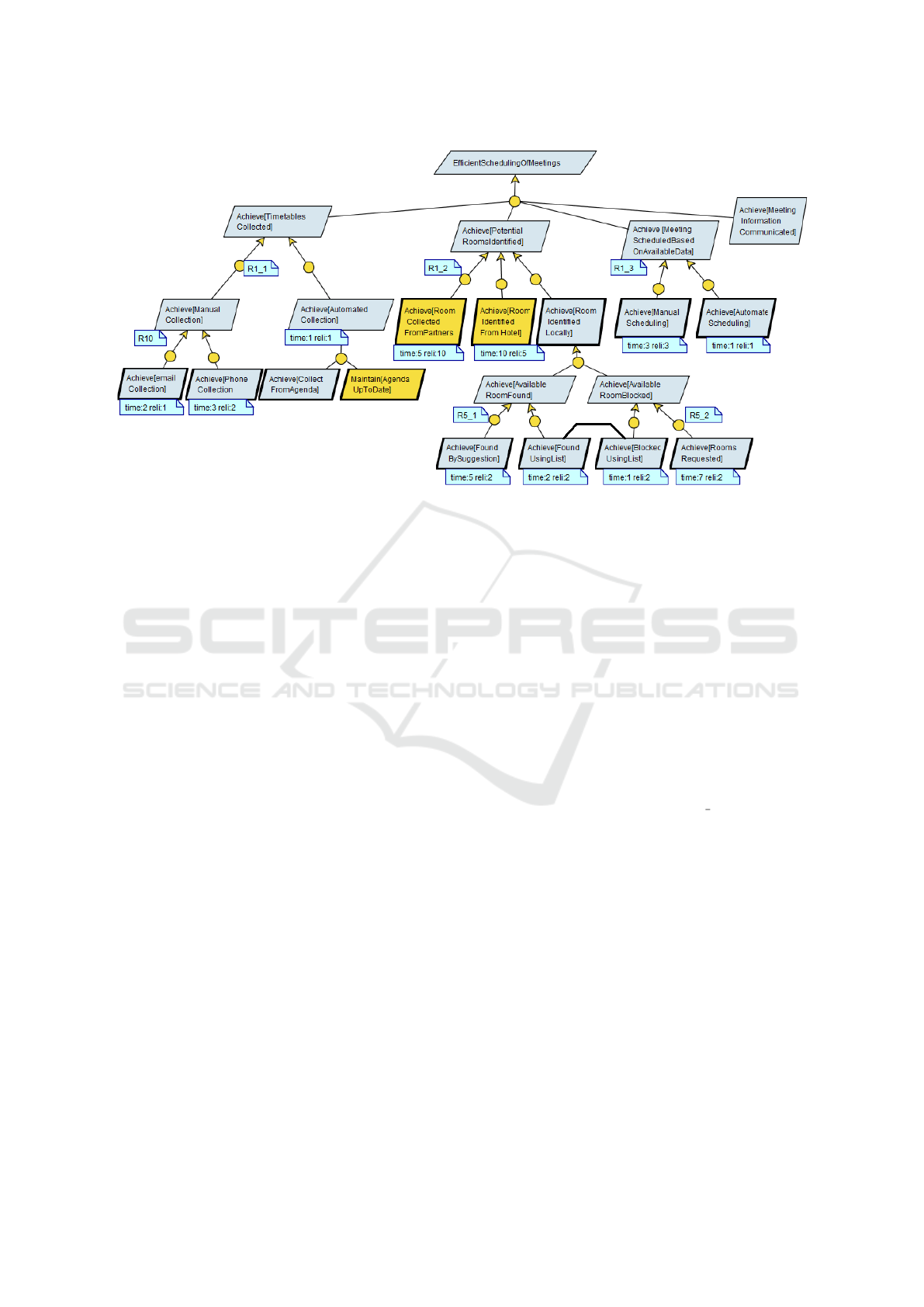
Figure 1: Goal graph for the Meeting Scheduler.
In our case study modelled in Figure 1,
the top refinement decomposes the goal “Ef-
ficientSchedulingOfMeetings” into the follow-
ing goals: “Achieve[TimetablesCollected]”,
“Achieve [PotentialRoomsIdentified]”, “Achieve
[MeetingScheduledBasedOnAvailableData]” and
“Achieve[Meeting InformationCommunicated]”.
This is an AND-refinement of the top level goal: the
set of subgoals forms a chain of milestones that yields
our top level goal. Such refinements are spotted with
yellow circular connectors in our model.
As depicted in Figure 1, the first level of refine-
ment for our case study is is composed of the goals:
“Achieve[TimetablesCollected]”, “Achieve [Poten-
tialRoomsIdentified]”, “Achieve [MeetingScheduled-
BasedOnAvailableData]” and “Achieve[Meeting In-
formationCommunicated]”. Those goals form a
AND-refinement of the higher level goal: the set of
subgoals forms a chain of milestones that yield our
top level goal. Such a refinement can be spotted by a
yellow circular connectors in our model.
Our model contains many OR-refinements that
can be detected as yellow circular connectors de-
parting from the same parent goal. For exam-
ple, the goal “Achieve[TimetablesCollected]” can be
satisfied either by “Achieve[ManualCollection]” or
“Achieve[AutomatedCollection]”. Goals may also
have more than two alternatives. For example, the
goal ”Achieve[PotentialRoomsIdentified]” has three
alternatives. Some alternatives may be restricted
to specific choice done in another one. For exam-
ple, the alternatives ”Achieve[FoundUsingList]” and
”Achieve[BlockedUsingList]” need to be selected to-
gether.
In this paper, we will assume only one al-
ternative can be selected in a configuration and
will discuss this again towards the end of our pa-
per. A design configuration can then be repre-
sented as a vector D = {R
1
, ..R
N
} where R
i
is
an integer in the range 0..N
i
that represents the
selected alternative. 0 means no alternative se-
lected and is only relevant for a sub-alternative that
is not in the scope (i.e. subtree) of a selected
alternative, e.g. “Achieve[EmailCollection]” and
“Achieve[PhoneCollection]” is not relevant when se-
lecting “Achieve[AutomatedCollection]”. The identi-
fication number of each alternative is captured in the
model. They are graphically represented in Figure 1
from left to right. For example, R1 1 has two alter-
natives: #1 is “Achieve[ManualCollection]” and #2 is
“Achieve[AutomatedCollection]”.
The functional goal decomposition stops when
reaching a goal controllable by an agent, i.e. answer-
ing the “WHO” question about responsibility assign-
ment. These goals are either requirements (depicted
like goals but with a thicker border) on the software
or expectations on the behaviour of agents in the envi-
ronment (depicted as requirements but with a yellow
background).
The satisfaction of goals can be assessed by
their contribution to different several qualities usu-
ally modelled as non-functional requirements (NFR)
using fulfilling standard classifications such as (ISO,
2011). Each functional requirement can contribute to
one or several NFR. This should be preferably mea-
sured in a well-defined domain units, either generic
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
288
(e.g. reliability of a goal can be measured as the ratio
of number of failures vs. total number of occurrences)
or problem-specific (e.g. usability can be assessed as
the amount of manual work that needs to be done).
NFR satisfaction on higher goals can usually be as-
sessed as a combination of the contribution of lower
level nodes (eventually possibly leaf requirements)
using propagation rules. For an OR-refinement, the
maximal value is selected as we look for the optimal
(as maximum). For an AND-refinement, it will depend
on the type of quality assessed:
• many properties related to resources usage can be
additive on such refinements, e.g. our usability
metric measured in hours.
• reliability is not additive but multiplicative, espe-
cially when considering chains of tasks as in our
model structure
• user satisfaction will generally be reflected by the
minimal level of satisfaction of a goal refinement.
A more complete framework to reason about the par-
tial satisfaction of goals was also developed by (Letier
and van Lamsweerde, 2004).
Figure 1 shows two quality attributes: time and re-
liability for leaf-level goals. From there we can infer
higher level values using the above rules. For exam-
ple, at top level the total cost will be the sum of the
cost of R1 1, R1 2 and R1 3.
4 TRANSLATING GOAL
VARIANTS INTO A CP MODEL
Translating the KAOS model into an OscaR.CP
model requires three main steps
• extracting all alternatives from the model
• generating specific constraints across alternatives
• for each target quality: producing an objective
function
Note the target CP model is written is the same lan-
guage as OscaR, i.e. the Scala programming language
which is a very expressive general-purpose program-
ming language providing support for functional pro-
gramming (Odersky, 2004).
4.1 Extracting Alternatives
Alternatives are extracted by querying our model
repository. In our experimental setting, we are us-
ing the Objectiver tool which can be queried us-
ing OQL (Respect-IT, 2005). We also use some
post-processing to only keep goals with more than
one AND-refinement, that is, goals with an OR-
refinement. Such queries can easily be adapted to
other contexts. The result is shown in Listing 1. Each
OR-refinement is given a unique identifier R1 1, etc.),
is labelled with the parent goal, and decorated with
the size of the AND-refinement set composing the OR-
Refinement (named in short in the following, the size
of the OR-Refinement).
Listing 1: Listing of alternatives with fan-out.
R1 1 Ach ieve [ T i m e t a b l e s C o l l e c t e d ] 2
R1 2 Ach ieve [ P o t e n t i a l R o o m s I d e n t i f i e d ] 3
R1 3 Ach ieve [ Me eti ngS che duledBasedOnAvailab leD . ] 2
R5 1 Ach ieve [ AvailableRoomFound ] 2
R5 2 Ach ieve [ Availa bleRoomBlocked ] 2
R10 Achieve [ M a n u a l C o l l e ction ] 2
In the following, each OR-refinement in the goal
graph will have a state. The values of the states are:
• Disabled: the OR-refinement has been discarded
and none of its alternatives can be selected in the
design
• Enabled: the OR-refinement is not discarded and
one of its alternatives may be selected in the de-
sign (but none is currently selected
• Selected: the OR-Refinement is enabled and one
alternative is selected in the design
Based on this, for each alternative, a variable is de-
clared, with the identifier of an OR-Refinement as a
name and with a domain ranging from 0 to the size
of the OR-refinement as computed in the previous
step. A special kind of variable called CPIntVar cap-
turing the specified range is used. A strictly posi-
tive value means the OR-refinement is enabled and the
value tells the alternative that is selected. A “0”-value
means the alternative is disabled.
4.2 Generating Specific Constraints
In what follows, we will call sub − alternative, an al-
ternative in the subtree of another alternative.
The following specific constraints express that at
the end of the computation a complete and consistent
design has been built:
• completeness: all top level alternatives OR-
refinements are enabled selected (i.e. all associ-
ated variables ?!==0)
• consistency#1: if an alternative is not selected, all
its sub- alternatives should must be disabled (by
recursion, it is enough to disable the closest sub-
alternatives using refinement links)
Towards Multi-objective Optimisation of Quantitative Goal Models using Constraint Programming
289
• consistency#2: if an alternative is selected, its
sub-alternatives should be enabled (again the
same recursion remark holds)
• domain specific: e.g. if some alternatives need
to be selected together or if two alternatives are
mutually exclusive.
The computation of those constraints is quite easy to
translate using Boolean equality/equivalence ? ===,
difference ?! ==, implication ==>, conjunction &&
and disjunction || operators as depicted in Listing 2.
Listing 2: CP model for goal variants and constraints.
va l R1 1 = CPIntVar (0 t o 2 )
va l R1 2 = CPIntVar (0 t o 3 )
va l R1 3 = CPIntVar (0 t o 2 )
va l R5 1 = CPIntVar (0 t o 2 )
va l R5 2 = CPIntVar (0 t o 2 )
va l R10 = CPIntVar ( 0 t o 2)
/ / t o p l e v e l a l t e r n a t i v e s
add ( R1 1 ?!== 0)
add ( R1 2 ?!== 0)
add ( R1 3 ?!== 0)
/ / e na b l i n g and d i s a b l i n g c o n s t r a i n t s
add ( ( R1 2 ?!== 3 )
==> ( ( R5 1?===0) && ( R5 2 ? == =0 )) )
add ( ( R1 2 ?=== 3 )
==> ( ( R5 1 ?! ==0 ) && ( R5 2 ? ! = = 0 ) ) )
/ / domain s p e c i f i c c o n s t r a i n t s
add ( ( R1 1 ?!== 1 ) ==> ( R10?===0))
add ( ( R1 1 ?=== 1 ) ==> ( R10 ? ! = =0 ) )
Based on this set of constraints, the list of alternatives
can be easily produced using the commands of Listing
3. It generates 24 different configurations.
Listing 3: Optimisation search.
s e a r c h {
b i n a r y S t a t i c (
Seq ( R1 1 , R1 2 , R1 3 , R5 1 , R5 2 , R10 ) )
} on S o l u t i o n {
p r i n t l n ( ” R1 1 : ”+R1 1+ . . . )
} s t a r t ( )
4.3 Objective Function
Objective functions are also encoded as CPIntVar
and can be expressed using expressions involving our
variables. The rules described in Section 2 are ap-
plied to produce evaluation at all levels enabling leaf
values to propagate up to the top level based on the
selected alternatives. The alternative selection opera-
tor is simply the truth value (RX?===expected value)
which will evaluate to 0 when false and to 1 when
true. Note that we consider only refinements without
any shared goals which deserve a special attention and
are discussed at the end of this section.
For example, our time quality can be encoded as
shown in Listing 4.
Listing 4: Optimisation search.
def ti me R 1 1 : CPIntVar =
( R1 1 ? === 1)∗ (( R10?===1)∗2+(R10?===2)∗3)
+( R1 1?===2)∗1
def ti me R 1 2 : CPIntVar =
( R1 2?===1)∗5+
( R1 2?===2)∗10+
( R1 2 ? === 3)∗ (( R5 1?===1)∗5+( R5 1?===2)∗2
+( R5 2?===1)∗1+( R5 2?===2)∗7)
def ti me R 1 3 : CPIntVar =
( R1 3?===1)∗3+( R1 3?===2)∗1
va l t ime =( t ime R1 1+ tim e R1 2+ tim e R 1 3 )
At this point, it is easy to perform a single objective
search, for example minimising the time can be done
inserting the command minimize(time) before the
search. It will yield the result of Listing 5
Listing 5: Optimisation search.
o b j e c t i v e t i g h t e n e d t o 10 l b :−1
R1 1 :1 R1 2 : 1 R1 3 : 1 R5 1 : 0 R5 2 : 0 R10 : 1
o b j e c t i v e t i g h t e n e d t o 8 l b :−1
R1 1 :1 R1 2 : 1 R1 3 : 2 R5 1 : 0 R5 2 : 0 R10 : 1
o b j e c t i v e t i g h t e n e d t o 6 l b :−1
R1 1 :1 R1 2 : 3 R1 3 : 2 R5 1 : 2 R5 2 : 1 R10 : 1
o b j e c t i v e t i g h t e n e d t o 5 l b :−1
R1 1 :2 R1 2 : 3 R1 3 : 2 R5 1 : 2 R5 2 : 1 R10 : 0
5 MULTI-OBJECTIVE
OPTIMISATION
Performing a multi-objective search is also quite
easy thanks to the multi-objective search function
and Pareto visualisation contributed by (Hartert and
Schaus, 2014). After defining a second objective
function, the optimisation command before the search
becomes paretoMaximize(obj1, obj2) as shown
in Listing 6. Note that the first objective function was
turned into a maximisation by computing 20 − time
(i.e. time resource left) just to ensure both functions
need to be maximised.
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
290
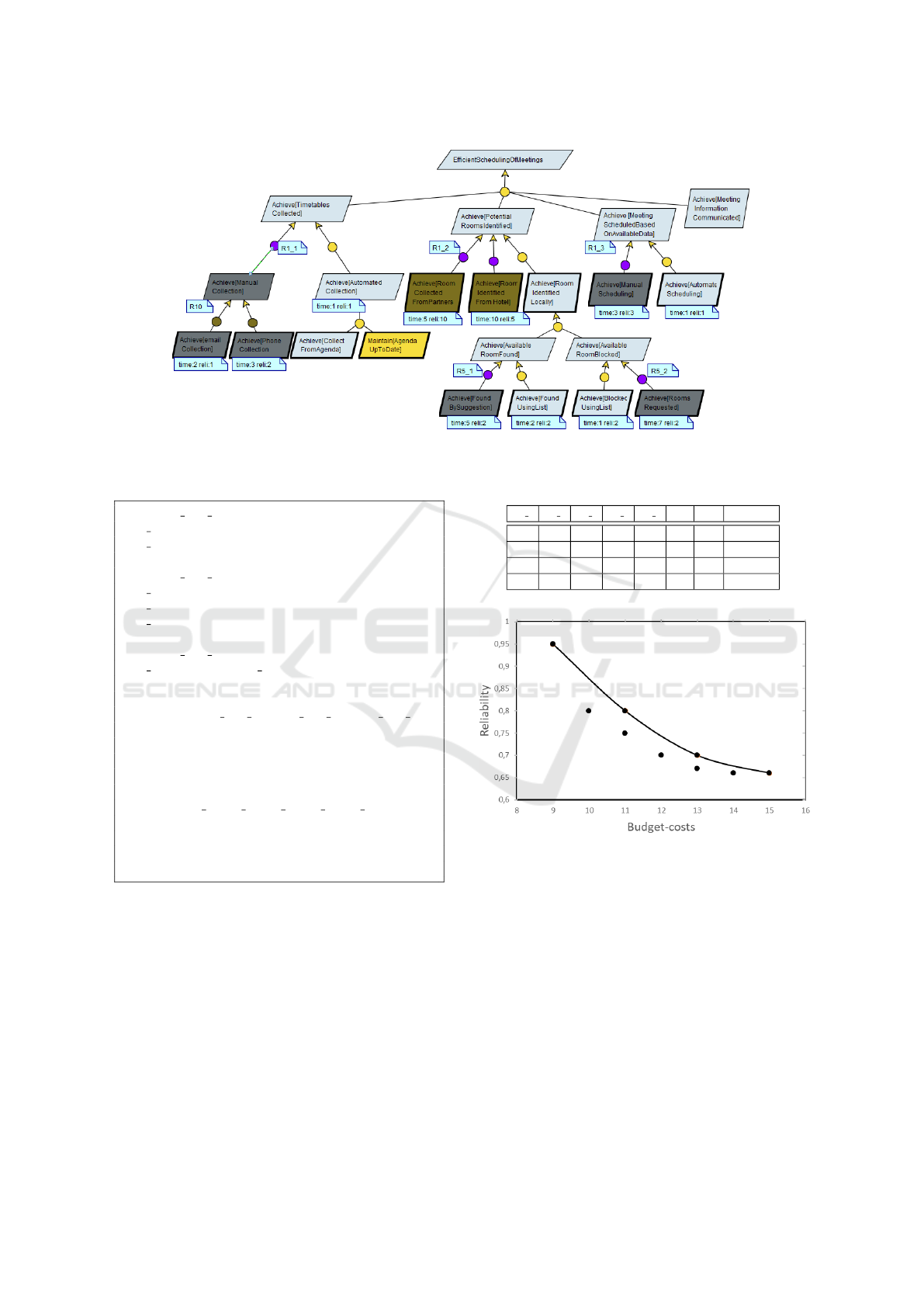
Figure 3: Visual representation of the selected design.
Listing 6: Multi-objective search (for costs see Listing 6).
def r e l i R 1 1 : CPIntVar =
( R1 1 ? === 1)∗ (( R10?===1)∗1+(R10?===2)∗2)+
( R1 1?===2)∗1
def r e l i R 1 2 : CPIntVar =
( R1 2?===1)∗10+
( R1 2?===2)∗5+
( R1 2?===3)∗2
def r e l i R 1 3 : CPIntVar =
( R1 3?===1)∗3+( R1 3?===2)∗1
va l o bj1 =t im e ∗( −1)+20
va l o bj2 = r e l i R 1 1 ∗ r e l i R 1 2 ∗ r e l i R 1 3
cp . pa reto Maxi miz e ( obj1 , ob j2 )
s e a r c h {
b i n a r y S t a t i c (
Seq ( R1 1 , R1 2 , R1 3 , R5 1 , R5 2 , R10 ) )
} on S o l u t i o n {
p a r e t o P l o t . i n s e r t ( obj 1 . v alu e ,
ob j2 . v a lue )
} s t a r t ( )
Figure 2 depicts both the complete search as a cloud
of points and the resulting Pareto front which can also
be presented in tabular form with more information
enabling the selection (see Table 1). The reliability
information has been normalised to a real value be-
tween 0 and 1 without impacting the solutions but to
better match conventional representation for this at-
tribute. The plot and the table can be used to guide
the analyst in selecting a right solution, e.g. by ruling
out too costly alternatives, unreliable ones or making
sure a specific OR-refinement is selected.
Table 1: Tabular view of Pareto solutions.
R1 1 R1 2 R1 3 R5 1 R5 2 R10 Cost Reliability
1 1 1 0 0 2 9 0,95
2 1 1 0 0 0 11 0,8
2 1 2 0 0 0 13 0,7
2 3 2 2 1 0 15 0,66
Figure 2: Pareto front.
The tool also provides a filtering mechanism to grey
out the part of the model not covered by the selected
alternative. Figure 3 highlights the instance selected
by the time minimisation reported earlier.
5.1 Discussion
Shared goals require some extra processing in order
to avoid counting them twice. Actually, a shared goal
may have a contribution of its own to be counted once
and a contribution for being involved in one or more
refinements. Making sure the goal is counted once
can be encoded through selection checking operators
referring to the other alternatives involving it.
Towards Multi-objective Optimisation of Quantitative Goal Models using Constraint Programming
291

About the readability of the constraints, although
the generated code is meant to be executed by an
optimisation engine, the selection operators could
be stated in more user-friendly form, e.g. using
isSelected(alt) rather than ”alt?! == 0. Operators for
checking other states can also be introduced.
The current mapping is limited to the selection of
a single alternative which is usual for goal refinements
but not for the dual of goals, i.e. obstacles. In this
case, making sure an obstacle is managed may require
to select multiple OR-refinements. The current map-
ping cannot cope with this but could be adapted, e.g.
an array of CPBoolVar, and specific constraints for
imposing no, one or some alternatives. This results in
the generation of far larger design spaces which also
raises the need for better guidance.
6 CONCLUSION & NEXT STEPS
In this paper, we developed an approach to deal with
the exploration of the design space at requirements
engineering time. As multiple qualities need to be
assessed simultaneously, a multi-objective approach
computing a Pareto front was used to provide the an-
alyst with a candidate set of solutions which can then
be reviewed more carefully. Our translation from the
KAOS notation to the OscaR.CP was tested on the
meeting scheduler benchmark.
Our work is still quite in early phase. Our next
steps are to cover the different extensions identi-
fied such as better language primitives, dealing with
shared goals and allowing the selection of multiple
alternatives. We also plan to improve usability and to
validate on larger models and with external analysts.
ACKNOWLEDGEMENTS
Thanks to Respect-IT for giving access to the Objec-
tiver tool and to the OscaR team for its Open Source
optimisation library.
REFERENCES
Aguilar, J., Garrig
´
os, I., and Maz
´
on, J.-N. (2011). A goal-
oriented approach for optimizing non-functional re-
quirements in web applications. pages 14–23.
Bagnall, A., Rayward-Smith, V., and Whittley, I. (2001).
The next release problem. Information and Software
Technology, 43(14):883 – 890.
Barone, D., Jiang, L., Amyot, D., and Mylopoulos, J.
(2011). Reasoning with key performance indicators.
volume 92, pages 82–96.
Calderon, A. et al. (2012). Webred: A model-driven tool
for web requirements specification and optimization.
In Web Engineering.
Dardenne, A., van Lamsweerde, A., and Fickas, S. (1993).
Goal-directed requirements acquisition. Sci. Comput.
Program., 20(1-2):3–50.
Harman, M. (2007). The current state and future of search
based software engineering. In Future of Software En-
gineering (FOSE ’07), pages 342–357.
Hartert, R. and Schaus, P. (2014). A support-based algo-
rithm for the bi-objective pareto constraint. In Proc.
28th AAAI Conf. on A.I., July 27-31, Qu
´
ebec, Canada.
Heaven, W. and Letier, E. (2011). Simulating and optimis-
ing design decisions in quantitative goal models. In
IEEE 19th Int. Requirements Engineering Conference.
ISO (2011). System and Software Quality Requirements
and Evaluation (SQuaRE). https://iso25000.com.
ITU (2012). Z.151 (10/12), User Requirements Notation
(URN) - Language Definition.
Karatas¸, A. S., O
˘
guzt
¨
uz
¨
un, H., and Do
˘
gru, A. (2010). Map-
ping extended feature models to constraint logic pro-
gramming over finite domains. In Proc. of the 14th
Int. Conf. on Software Product Lines: Going Beyond.
Letier, E. and van Lamsweerde, A. (2004). Reasoning about
partial goal satisfaction for requirements and design
engineering. SIGSOFT Softw. Eng. Notes, 29(6).
Luo, H. and Amyot, D. (2011). Towards a declarative,
constraint-oriented semantics with a generic evalua-
tion algorithm for GRL. In Proc. of the 5
th
Interna-
tional i* Workshop, Trento, Italy, August 28-29.
Mogk, N. W. (2014). A requirements management system
based on an optimization model of the design process.
Procedia Computer Science, 28:221 – 227.
Nguyen, C. M. et al. (2018). Multi-objective reasoning with
constrained goal models. Requir. Eng., 23(2).
Odersky, M. (2004). Scala Programming Language. https:
//www.scala-lang.org.
OscaR Team (2012). OscaR: Operational Research in
Scala. Available under the LGPL licence from https:
//bitbucket.org/oscarlib/oscar.
Respect-IT (2005). The Objectiver Goal-Oriented Require-
ments Engineering Tool. http://www.objectiver.com.
van Lamsweerde, A. (2009). Requirements Engineering -
From System Goals to UML Models to Software Spec-
ifications. Wiley.
van Lamsweerde, A., Darimont, R., and Massonet, P.
(1995). Goal-directed elaboration of requirements for
a meeting scheduler: problems and lessons learnt. In
Proc. of IEEE Int. Symposium on Req. Eng. (RE’95).
Yu, E. S. K. and Mylopoulos, J. (1997). Enterprise mod-
elling for business redesign: The i* framework. SIG-
GROUP Bull., 18(1):59–63.
Zhang, Y., Finkelstein, A., and Harman, M. (2008). Search
based requirements optimisation: Existing work and
challenges. In Requirements Engineering: Founda-
tion for Software Quality.
Zubcoff, J. et al. (2018). Evaluating different i*-based ap-
proaches for selecting functional requirements while
balancing and optimizing non-functional require-
ments: A controlled experiment. Information and
Software Technology.
ICORES 2020 - 9th International Conference on Operations Research and Enterprise Systems
292
