
Fuzzy Alarm System based on Human-centered Approach
Elena Magán
1a
, Agapito Ledezma
1b
, Paz Sesmero
1c
and Araceli Sanchis
1d
1
Computer Science and Engineering Deparment, Universidad Carlos III de Madrid, Av. de la Universidad 30,
Leganés (Madrid), Spain
Keywords: ADAS, Advanced Driver Assistance System, Alarm System, Fuzzy Logic, Multi-agent Systems, Ontology.
Abstract: This paper presents an Advanced Driver Assistance System (ADAS), based on a fuzzy logic decision support
system and developed by using a multi-agent system. The ADAS is designed so that it can detect dangerous
situations on urban environments and alert the driver about them if necessary. For that, it collects data from
the car, the car’s surroundings and the driver, and represents the information as an OWL ontology. Then, a
fuzzy logic inference system uses this information to evaluate whether there is danger or not. The system can
detect 9 dangerous situations by using a repository of 14 fuzzy rules, based on a previous work and expanded
on this one. Although with limitations, the results show that the ADAS can alert the driver when the driver is
in a dangerous situation.
1 INTRODUCTION
According to a status report launched by the World
Health Organization (WHO) in 2018, road traffic
crashes are one of the leading causes of death in the
world, being also the leading killer of people aged 5-
29 years (WHO, 2018). Moreover, distractions are
one of the main causes of road traffic accidents –
recent studies estimate that almost 70% of crashes are
caused by driver's distractions (Dingus et al., 2016).
For these reasons, the development of Advanced
Driving Assistance Systems (ADAS) can make a
huge impact on the issue of preventing road traffic
accidents. These systems are active components
installed on vehicles and are designed to assist the
driver continuously to prevent dangerous situations
(Bengler et al., 2014), so they could help minimize
the consequences of human error and, thus, to reduce
the number of road accidents.
This paper presents an ADAS alarm system based
on fuzzy logic that detects potentially dangerous
situations and acts as a co-driver, warning the real
driver by using visual and sounding stimuli. This work
continues the ADAS developed in (Zamora, Sipele,
Ledezma Espino and Sanchis de Miguel, 2017), where
a
https://orcid.org/0000-0001-9797-6146
b
https://orcid.org/0000-0002-0041-6829
c
https://orcid.org/0000-0001-9473-6809
d
https://orcid.org/0000-0002-1429-4092
the authors used classical logic to build the decision-
making system. In this work, this system is expanded
both by using fuzzy logic and by increasing the number
of dangerous situations detected.
Whereas classical logic represents information in
a binary way –that is, a clause can either be true or be
false–, fuzzy logic works with statements that can be
partially true or false (Zadeh, 1988). With fuzzy logic,
one can handle imprecise or rough information,
which, in relation to the development of ADAS, is
extremely convenient to determine potentially
dangerous situations. Moreover, since fuzzy logic’s
output is also a grade of truth, the intensity of the
alarm can be variable according to the activation
value of the rules that detect the dangerous situations.
The development environment of the ADAS
consists of a driving simulator based on the STISIM
Drive software (Intelligent Systems Technology,
2019). With this simulator, it is possible to reproduce
realistically the driving environment of a vehicle in
real-time.
The driving environment interacts with a multi-
agent system, where there are multiple intelligent
agents with different functions. Some agents are in
charge of the data collection, their mission being
448
Magán, E., Ledezma, A., Sesmero, P. and Sanchis, A.
Fuzzy Alarm System based on Human-centered Approach.
DOI: 10.5220/0009348704480455
In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2020), pages 448-455
ISBN: 978-989-758-419-0
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

obtaining information both from the simulation –
about the cars, pedestrians, light traffics, etc.– and
from the driving environment –such as the steering
wheel angle–, and there are also agents that receive
and process that data, so that they can decide if it is
necessary to alert the driver.
The paper is organized as follows: Section 2
provides an overview of the background and related
work of ADAS, fuzzy logic and driving simulators.
The design of the proposed ADAS is described on
Section 3. Section 4 explains the experimental
settings and the results obtained, Finally, Section 5
presents the conclusions and proposes some related
future works.
2 BACKGROUND AND RELATED
WORK
Since road safety is one important issue in today’s
society, many ADAS –active components installed on
vehicles that assist the driver in dangerous situations–
are being investigated and developed nowadays, both
by business and academic researches (Pérez,
Gonzalez Bautista and Milanes, 2015).
In fact, there are some ADAS that are already
being commercialized. On one hand, many car brands
develop their own ADAS, like Ford’s Co-Pilot360™
Technology (Ford Motor Company, 2019) or Volvo’s
IntelliSafe Technology (Volvo Car Corporation,
2019). On the other hand, there are also companies
that sell ADAS systems that can be retrofitted on any
vehicle, as in the case of Mobileye Systems
(Mobileye, 2019). These products usually include
multiple systems to avoid risks while driving, like
lane departure warnings, collision avoidance or
pedestrian protection, among others.
However, these companies do not share their
researches nor the complete results obtained by their
products, so in this case it is more relevant to evaluate
the more recent academic works about ADAS.
On this matter, an interesting research is the
NAVIEYES project (Duguleana, Florin and Gheorghe,
2015). NAVIEYES is a smartphone-based ADAS that,
by using the dual camera of a modern smartphone, is
able to monitor both the outside and the inside of a
vehicle, and can alert the driver if necessary. Although
this is a practical and cheap approach, it requires a
calibration process beforehand that could discourage
the driver from using it regularly.
However, there are also extensive research about
vehicle-integrated ADAS. Several of them focus on the
development of individual ADAS systems, prepared to
detect exclusively one kind of dangerous situation.
Among these works, there are systems to supervise the
vehicle safety distance (Attia, Ismail and Ali, 2016), to
protect pedestrians from danger (Sanatkumar, Gandhe
and Dhulekar, 2015), or even to detect speed bumps
(Wilson, Babu and Tharumar, 2015).
This paper is based on a previous work, where a
rule-based system is developed to detect and prevent
multiple dangerous situations (Zamora et al., 2017).
To continue with the research, the system has been
modified to use fuzzy logic on the decision-making
system, and new dangerous situations have been
studied. As a starting point, some tests have been
performed on the previous system, which revealed
some limitations. The most relevant one was induced
by an alarm that detected that a parked car was going
to join the road, since this alarm generated false
positives continuously whenever there were vehicles
parked on the right. This wouldn’t be useful on an
urban environment, where there are usually parked
cars, so it has been decided to replace this alarm with
another one that can detect similar dangerous
situations without those false positives.
In this work, it has been decided not to use the
pedal activity of the vehicle as an input of the ADAS,
since preliminary tests revealed that these values are
driver dependent and are not easily generalized. This
is because the driver’s behavior determines both the
pedal’s usage and the perception-reaction time (Lee
and Yeo, 2016), which would involve a more
complex approach that it has been decided not to deal
with in this work.
3 SYSTEM DESCRIPTION
This section describes the main elements of the
ADAS system: the ontology that gathers the
information about the environment, the dangerous
situations the ADAS must detect, the fuzzy inference
system that evaluates if the driver is involved on one
of those situations, and the Human-Computer
Interface that warns the driver if necessary.
3.1 Ontology Data
With the information retrieved by simulated sensors
(LiDAR sensor, frontal/rear cameras), and the data
collected from the driver’s vehicle, the ADAS has all
the necessary information for the decision-making
system. This information is represented on an
ontology, that is based on the previous work from
(Zamora et al., 2017) and has been extended. Figure
1 shows the ontology used for this work.
Fuzzy Alarm System based on Human-centered Approach
449
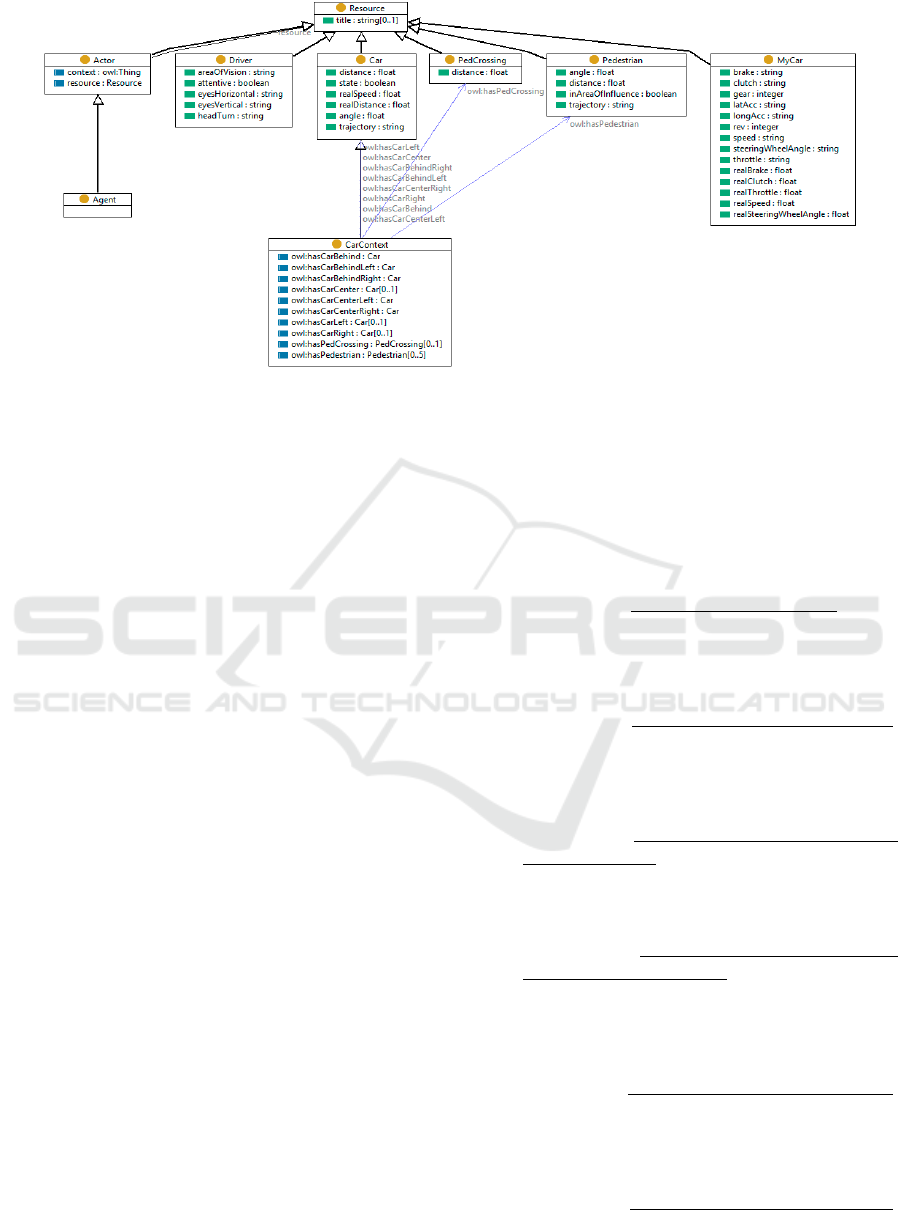
Figure 1: Ontology diagram.
The main changes made to the previous ontology
are: extracting numeric values of attributes previously
categorized, and adding some information about the
surrounding vehicles –such as their speed, trajectory,
and angle with respect to the driver’s vehicle.
This ontology represents the information of the
whole simulation environment, but not every piece of
data is used on the decision-making system. The
relevant classes and attributes for this project, with
their possible values, are described below.
Class MyCar: Data related to the vehicle of
the driver, like the steering wheel angle or the
level of stepping of the pedals.
Relevant Attributes: realSteeringWheelAngle
([-450,450]), realSpeed ([0,200]), realClutch
([0,1]), realBrake ([0,1]), realThrottle ([0,1]),
gear (-1, 1, 2, 3, 4, 5, 6).
Class CarContext: Information about the
surroundings of the driver. That includes both
the vehicles and the pedestrians detected.
Relevant Attributes: hasCar<zone> (instance
of class Car that represents the car on the
<zone> position), hasPedestrian (0 to 5
instances of class Pedestrian that represent the
closest pedestrians detected).
Class Car: Data that defines a vehicle of
CarContext, like the distance to the driver, the
speed, etc.
Relevant Attributes: state (moving, stopped),
realDistance ([0, ∞ ]), angle ([-180,180]),
realSpeed ([0,200]), trajectory (north, south,
east, west).
Class Pedestrian: Information about a
detected pedestrian: the distance to the driver,
the trajectory it follows...
Relevant Attributes: angle ([-180,180]), distance
([0, ∞]), trajectory (north, south, east, west).
3.2 Dangerous Situations Detected
With this information, the dangerous situations that
this ADAS can detect are:
Situation 1. Risk of Frontal Collision. While
driving normally, there is a vehicle in front of
the car and the distance to said vehicle is too
short, so if the front car stops suddenly it could
cause a collision.
Situation 2. Risk of Running over (Frontal).
While driving normally, a pedestrian crosses
the road in front of the driver, but the distance
to the vehicle is too short and if the driver
doesn’t stop the car it will cause an accident.
Situation 3. Risk of Running over (Frontal,
Not Visualized). While driving normally, a
pedestrian is crossing the road in front of the
driver, but there are vehicles obstructing the
driver’s vision and the pedestrian is not visible.
Situation 4. Risk of Rear Collision (Rear
Vehicle Approaching). While driving
normally, there is a vehicle on the rear of the
car and the distance to said vehicle is too short,
so if the driver stops suddenly it could cause a
collision.
Situation 5. Risk of Rear Collision (Reverse).
While driving on reverse, there is a vehicle on
the rear of the car and the distance to said
vehicle is too short, so if the driver doesn’t stop
the car it could cause a collision.
Situation 6. Risk of Lateral Collision (Turn).
While driving normally, the driver tries to turn
the car, but there is already a vehicle on that
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
450

position, so if the driver turns that way it could
cause a collision.
Situation 7. Risk of Running over (Rear).
While driving on reverse, a pedestrian crosses
the road behind the car, but the distance to the
vehicle is too short and if the driver doesn’t
stop the car it will cause an accident.
Situation 8. Risk of Lateral Collision
(Intersection). While arriving at an intersection,
there is a car approaching from any of the sides
of the intersection, so if the driver doesn’t stop
the car it could cause a collision.
Situation 9. Risk of Overtaking on the Right
Lane. While driving normally, a vehicle on the
right lane is traveling faster than the car,
overtaking irresponsibly. If the driver doesn’t
notice and tries to change lanes, or if the other
vehicle tries to change lanes while being too
close to the driver, it could cause an accident.
3.3 Fuzzy Inference System
Since the decision-making system of the ADAS is
based on fuzzy logic, fuzzy rules have been defined
to detect the potentially dangerous situation. For this
project, the decision-making system is designed as a
Mamdani fuzzy inference system (Mamdani and
Assilian, 1975). To design a fuzzy logic system of this
kind, it’s necessary to define the following aspects:
both input and output fuzzy sets, and fuzzy rules.
3.3.1 Input Fuzzy Sets
Input fuzzy sets represent the values that the variables
can take. For example, the “speed” variable could be
classified with 3 fuzzy sets: low, medium, or high.
The fuzzy system would receive a numeric value for
speed and assert the grade of truth of that variable for
each fuzzy set.
To be able to do that, it is necessary that every
fuzzy set is defined by a function µA(x) –membership
function of the fuzzy set A for an input value of x–,
that will assign a value in the 0 to 1 range depending
on the input x. 0 would mean that it is completely
false that x belongs to the fuzzy set A, while 1
represents that it is completely true.
To describe the variables and their possible fuzzy
sets, each fuzzy set will be designed as a continuous
function, represented by ordered pairs that must be
connected linearly. To understand this, an ordered
pair of (60,1) represents that the variable input of 60
has a grade of truth of 1. Additionally, a fuzzy set that
is represented by just one ordered pair is known as a
singleton.
For this ADAS, fuzzy sets have been designed to
deal with the information extracted from the
ontology: distance to the vehicles, speed, etc. The
variables and their corresponding fuzzy sets –as
defined by their ordered pairs– are:
a) Pedestrians position: “angle” variable:
- behind_right: (125,0) (140,1) (165,1)
(180,0)
- behind: (-180,1) (-175,1) (-165,0) (165,0)
(175,1) (180,1)
- behind_left: (-180,0) (-165,1) (-140,1)
(-125,0)
- front_left: (-55,0) (-40,1) (-15,1) (0,0)
- front: (-15,0) (-5,1) (5,1) (15,0)
- front_right: (0,0) (15,1) (40,1) (55,0)
b) Surrounding cars position: “carPosition”
variable:
- behind_right: (125,0) (140,1) (160,1)
(175,0)
- behind: (-180,1) (-175,1) (-170,0) (170,0)
(175,1) (180,1)
- behind_left: (-175,0) (-160,1) (-140,1)
(-125,0)
- left: (-135,0) (-115,1) (-65,1) (-45,0)
- front_left: (-55,0) (-40,1) (-20,1) (-5,0)
- front: (-10,0) (-5,1) (5,1) (10,0)
- front_right: (5,0) (20,1) (40,1) (55,0)
- right: (45,0) (65,1) (115,1) (135,0)
c) Surrounding cars state: “carState” variable
- moving: (1,1)
d) Distance to pedestrians and cars: “distance”,
“carDistance” and “carReactionTime”
- very_close: (0,1) (1,1) (1.5,0)
- close: (1,0) (1.5,1) (3,1) (3.5,0)
- normal: (3,0) (3.5,1) (4.5,1) (5,0)
- far: (4.5,0) (5,1) (20,1)
e) Surrounding cars speed: “carSpeed” variable
- high: (-100,1) (-15,1) (-10,0)
- medium: (-15,0) (0,1) (15,0)
- low: (10,0) (15,1) (100,1)
f) Driver’s steering wheel angle:
“steeringWheelAngle” variable
- left: (-450,1) (-90,1) (-40,0)
- center_left: (-45,0) (-40,1) (-20,1) (-15,0)
- center: (-20,0) (0,1) (20,0)
- center_right: (15,0) (20,1) (40,1) (45,0)
- right: (40,0) (90,1) (450,1)
g) Pedestrians and cars trajectory: “trajectory”
and “carTrajectory” variables
- north: (1,1)
- east: (3,1)
Fuzzy Alarm System based on Human-centered Approach
451

- south: (5,1)
- west: (7,1)
h) Variables that represent if there is a car closer
than a pedestrian at a certain position:
“distance_center_right_less_eq_ped” and
“distance_center_left_less_eq_ped”
variables
- no: (0,1)
- yes: (1,1)
i) Driver’s gear: “gear” variable
- reverse: (-1,1)
- first: (1,1)
- second: (2,1)
- third: (3,1)
- fourth: (4,1)
- fifth: (5,1)
- sixth: (6,1)
3.3.2 Output Fuzzy Sets
Output fuzzy sets represent the results that the fuzzy
system provides. The outputs are defined as fuzzy sets
too, so that the inference system can provide which is
the grade of truth of the output.
For this ADAS, an output has been established for
every possible rule that can be triggered. All of these
outputs are defined by linear growth functions from 0
to 1, where the defuzzification method of Center of
Gravity is applied. That is, the only fuzzy set of output
variables will be defined as:
- yes: (0,0) (1,1)
In addition, a threshold of 0.5 has been defined –
that is, if the activation value of a rule is lower than
0.5, the ADAS will not alert the driver of that danger.
3.3.3 Rules
Fuzzy rules combine both the input and the output
fuzzy sets to detect the dangerous situations studied.
Some of these situations are defined by two rules, one
with the conditions for the right and another for the
left. In these cases, the conditions for the right will be
used as an example.
a) Situation 1: Risk of Frontal Collision.
IF carPosition IS front AND carDistance
IS (close OR very_close) AND gear IS NOT
reverse
THEN alarm1 IS yes;
b) Situation 2: Risk of Running over (2 Rules).
IF trajectory IS west AND angle IS (front
OR front_right) AND distance IS (close
OR very_close) AND gear IS NOT reverse
THEN alarm2_1 IS yes;
c) Situation 3: Risk of Running Over (Frontal,
Not Visualized, 2 Rules).
IF carPosition IS front_right AND
carDistance IS (close OR very_close OR
normal) AND carState IS NOT moving
AND trajectory IS west AND angle IS
(front_right OR front) AND distance IS
(normal OR close OR very_close) AND
distance_center_right_less_eq_ped IS
yes AND gear IS NOT reverse
THEN alarm3_1 IS yes;
d) Situation 4: Risk of Rear Collision (Rear
Vehicle Approaching).
IF carPosition IS behind AND carState IS
moving AND carReactionTime IS very_low
AND carTrajectory IS north AND gear IS
NOT reverse
THEN alarm4 IS yes;
e) Situation 5: Risk of Rear Collision (Reverse).
IF carPosition IS behind AND carDistance
IS (close OR very_close) AND gear IS
reverse
THEN alarm5 IS yes;
f) Situation 6: Risk of Lateral Collision (Turn,
2 Rules).
IF (steeringWheelAngle IS (right OR
center_right) AND carPosition IS right
AND carDistance IS very_close OR
(carPosition IS behind_right AND
carReactionTime IS (low OR very_low))
AND gear IS NOT reverse
THEN alarm6_1 IS yes;
g) Situation 7: Risk of Running over (Rear, 2
Rules).
IF gear IS reverse AND angle IS (behind
OR behind_right) AND trajectory IS west
AND distance IS (close OR very_close)
THEN alarm7_1 IS yes;
h) Situation 8: Risk of Lateral Collision
(Intersection, 2 Rules).
IF carPosition IS (right OR front_right)
AND carState IS moving AND
carReactionTime IS (normal OR low OR
very_low) AND carTrajectory IS west AND
gear IS NOT reverse
THEN alarm8_1 IS yes;
i) Situation 9: Risk of Overtaking on the Right
Lane.
IF carPosition IS (right OR
behind_right) AND carSpeed IS high AND
carTrajectory IS north AND
carReactionTime IS very_low
THEN alarm9 IS yes;
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
452
3.4 HCI Messages
To warn the driver of all dangerous situations, seven
alarms have been established, based on the work by
(Zamora et al., 2017). These alarms share something
in common: they must show an image on the
simulator interface so that the driver can recognize
the symbol showed, and thus, the risk situation that is
happening. Optionally, a sound alarm could be played
at the most dangerous situations (alarms 1, 2 and 3).
On the designed system it is possible that multiple
alarms are activated at the same time. Because of that,
it has been implemented a priority system, so that the
ADAS can choose which one of the activated alarms
must be shown depending on its importance. To
define the hierarchy, risks of a car accident have been
analyzed to determine what are the most dangerous
situations for the driver, based on local statistics about
road traffic crashes by type of accident (DGT, 2017).
The proposed hierarchy is shown in Table 1:
Table 1: Alarm hierarchy.
Priority Alarm
Situation(s)
detected
1
Alarm 3: Running over a NOT
visualized pedestrian
3
2
Alarm 2: Running over a
visualized pedestrian
2, 7
3 Alarm 1: Frontal collision 1
4
Alarm 6: Lateral collision
(intersection)
8
5 Alarm 5: Lateral collision (turn) 6
6 Alarm 4: Rear collision 4, 5
7
Alarm 7: Overtaking on the right
lane
9
4 EXPERIMENTAL RESULTS
4.1 Experimental Setup
To verify the system, the testing will be done on
simulated environments because of the dangerous
situations that are subject to study. As the ADAS is at
an early stage of development, to perform
experiments that jeopardize people without the
guarantee that the system works would be both
irresponsible and unethical.
That way, a scenario has been designed for each
one of the situations. That scenario consists on the
simulation of the dangerous situation that the ADAS
is supposed to detect, so that it can be proven that the
alarm warns the driver in that situation. A description
of the simulator and the scenarios can be found in
(Zamora, Ledezma and Sanchis, 2016) and (Sipele,
Zamora, Ledezma and Sanchis, 2016).
To complement these unit tests, the ADAS has
been used while driving on a random urban
environment –that is, a default driving scenario has
been selected from the STISIM Driver Simulator
repository, so that it can be checked whether the
ADAS is useful or not on a real environment.
4.2 Experimental Results
First, the ADAS has been tested on the prepared
scenarios. The results obtained from these unit tests
have been generally satisfactory, since the ADAS
alerts the driver of all of the potentially dangerous
situations stablished in those scenarios.
However, those are prepared scenarios, and may
not be realistic. To study the effectiveness of the
ADAS on a real situation, it has been tested on a
random urban environment. This environment has
been extracted from the default driving scenarios
provided by the STISIM Driver Simulator repository,
and consists on a urban scenario that lasts about 15
minutes and challenges the driver with some hazards.
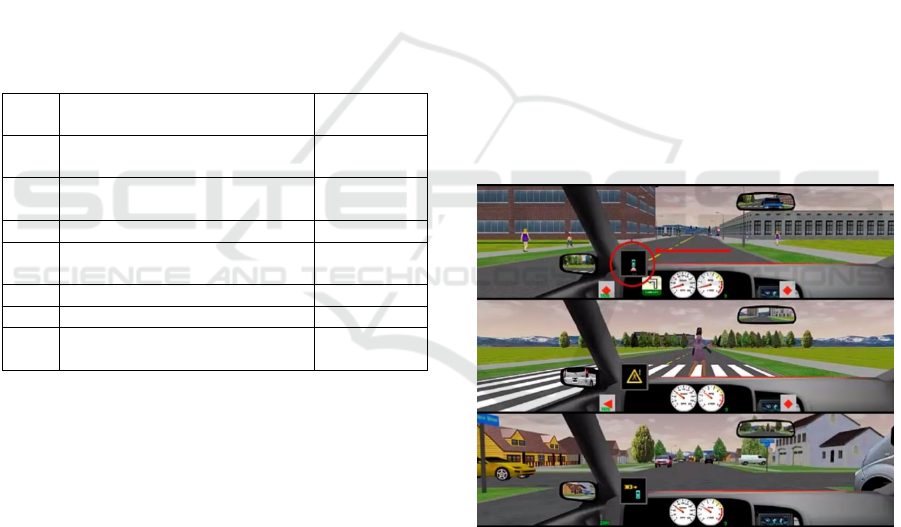
Figure 2 shows three different situations where
alarms are activated on the simulated environment.
Figure 2: Alarms activated.
As it can be seen on Figure 2, when an alarm is
activated an image is showed on the left side of the
dashboard. On the first example, the ADAS is alerting
of a risk of rear collision (alarm 4), as proved by the
proximity of the vehicle visible on the rear view
mirror. On the second one, it alerts the driver about
the pedestrian that is crossing the street (alarm 2). On
the last one it can be observed that a vehicle is
approaching from the left, and the ADAS is alerting
about a risk of lateral collision with it (alarm 6).
Fuzzy Alarm System based on Human-centered Approach
453

Table 2 shows the results obtained while testing the
ADAS on this regular, non-prepared, driving scenario.
Table 2: Results.
Alarm True positives False positives
1 11 33
2 5 0
3 5 2
4 3 1
5 7 13
6 2 0
7 1 2
As we can see, even though the ADAS warns the
driver about the dangerous situations, a lot of false
positives have been detected. Figure 3 shows an
example of these false positives detected, where the
ADAS is alerting the driver of a frontal collision
without being any danger ahead.
Figure 3: False positive from alarm 1.
These false positives are mostly from alarms 1
and 5, and their causes have been analyzed in order to
minimize them in a future version:
Alarm 1 is designed so that it can alert the
driver of risks of frontal collision. Some of
these false positives are caused by the data used
to determine the position of the surrounding
vehicles –that is, the angle with respect to the
driver. Due to this representation, the ADAS
detects some vehicles that are not exactly in
front of the vehicle as such, alerting the driver
on unnecessary situations. One possible
solution to this problem would be to change the
representation of the vehicles’ position to
lateral and longitudinal distances, which would
be more precise.
There have also been detected false positives
on curves, since sometimes the car does indeed
have a vehicle at the front, but there is no
danger because the driver is taking the turn and
is not going to hit a vehicle on another lane. In
this case, it would be convenient to study the
value of the steering wheel angle, so that the
ADAS can analyze if there is going to be a
collision or not.
Alarm 5 warns the driver when it detects that
the car can hit laterally another vehicle. Since
the steering wheel is very sensitive, it is
considered that the driver has to move it just a
bit to turn the vehicle. This causes the ADAS
to alert the driver at the slightest move of the
steering wheel, even if the driver is just
straightening up the car. To address this
problem, a possible solution would be to
consider the lateral speed of the vehicle instead
of the longitudinal speed that is currently used,
so that the ADAS would know how quickly the
vehicle is approaching to the side and whether
if it is a risky move or not.
A numerical comparison with the activation of the
alarms from the work by (Zamora et al., 2017)
wouldn’t make sense, because both the dangerous
situations detected and the alarms activated have been
changed and would be different. However, given the
variety of dangers avoided and the minimization of
previous false positives, it can be considered that the
new ADAS improves the previous one, even though
it is still necessary to reduce the false positives. As far
as we know, there are no other related works within
this specific research line, so a comparison with a
baseline cannot be showed.
5 CONCLUSIONS AND FUTURE
WORKS
On one hand, the current ADAS can detect the
potentially dangerous situations established on the
previous system, and does so while reducing the false
positives produced by the previous system. On the
other hand, the ability to detect situations has been
improved, because the new ADAS can warn the
driver on more diverse situations. Therefore, we
consider that the new system improves the previous
one, although there are still some false positives that
reduce the effectiveness of the new ADAS.
With that, it has been proven that it is viable to
develop an ADAS based on a decision-making
system by using fuzzy logic. This kind of system
provides great flexibility to represent the environment
information, which makes the process of making the
rules that use that information easy and intuitive.
As for the future works that could come from this
project, first it would be convenient to improve the
current system so that the problems detected while
VEHITS 2020 - 6th International Conference on Vehicle Technology and Intelligent Transport Systems
454

testing can be avoided. That problems include both
the false positives observed and the possible
improvement of the implementation that uses the
pedals' information. The CAOS research group, from
the Carlos III University of Madrid, is currently
working on a driver-monitoring system that could be
added to the system, so that the information about the
driver –like the area they are looking at– helps the
ADAS to detect risks more accurately.
Beyond the improvement of the ADAS developed
on this project, another line of work would be to
extend the system so that it can assist the driver in
more diverse situations. That way, there are numerous
devices that could be implemented, like a lane-
keeping alert system.
Finally, the ADAS could be further developed,
allowing it to take control of the vehicle in extremely
dangerous situations –e.g. if there is a risk of running
over a pedestrian and the driver hasn't started to brake
the car, the ADAS could stop the car by itself.
ACKNOWLEDGEMENTS
This work has been supported by the Spanish
Ministry of Science, Innovation and Universities,
RTI2018-096036B-C22, TRA2015-63708-R and
TRA2016-78886-C3-1-R projects.
REFERENCES
Attia, H. A., Ismail, S., & Ali, H. Y. (2016). Vehicle safety
distance alarming system. 2016 5th International
Conference on Electronic Devices, Systems and
Applications (ICEDSA).
Bengler, K., Dietmayer, K., Färber, B., Maurer, M., Stiller,
C., & Winner, H. (2014). Three Decades of Driver
Assistance Systems - Review and Future Perspectives.
IEEE Intelligent Transportation Systems Magazine,
6(4), 6-22.
DGT. (2017). Las principales cifras de siniestralidad vial.
Edición ampliada. España 2017. Retrieved May 13,
2019, from: http://www.dgt.es/
Dingus, T. A., Guo, F., Lee, S., Antin, J. F., Perez, M.,
Buchanan-King, M., & Hankey, J. (2016). Driver crash
risk factors and prevalence evaluation using naturalistic
driving data. Proceedings of the National Academy of
Sciences 113(10), 2636-2641.
Duguleana, M., Florin, G., & Gheorghe, M. (2015). Using
Dual Camera Smartphones As Advanced Driver
Assistance Systems: NAVIEYES System Architecture.
Proceedings of the 8th ACM International Conference
on PErvasive Technologies Related to Assistive
Environments. Corfu, Greece: ACM.
Ford Motor Company. (2019). Ford Driver Assist
Technologies | Ford Co-Pilot 360. Retrieved October
25, 2019, from: https://www.ford.com/technology/
Intelligent Systems Technology. (2019). Stisim drive: Car
driving simulator & simulation software. Retrieved
November 15, 2019, from: https://stisimdrive.com/
research/m100-system/
Lee, D., & Yeo, H. (2016). Real-Time Rear-End Collision-
Warning System Using a Multilayer Perceptron Neural
Network. IEEE Transactions on Intelligent
Transportation Systems.
Mamdani, E. H., & Assilian, S. (1975). An experiment in
linguistic synthesis with a fuzzy logic controller.
International Journal of Man-Machine Studies, 7(1), 1-
13.
Mobileye. (2019). Collision Avoidance System for
Distracted Driving. Retrieved October 26, 2019, from:
https://www.mobileye.com/uk/fleets/products/
Pérez, J., Gonzalez Bautista, D., & Milanes, V. (2015).
Vehicle Control in ADAS Applications: State of the
Art. In A. Perallos, U. Hernandez-Jayo, E. Onieva, & I.
J. García Zuazola, Intelligent Transport Systems:
Technologies and Applications (pp. 206-219).
Sanatkumar, R., Gandhe, S., & Dhulekar, P. (2015).
Pedestrian Protection System for ADAS using ARM 9.
International Journal of Computer Applications
127(2):19-23.
Sipele, O., Zamora, V., Ledezma, A., & Sanchis, A. (2016).
First Symposium SEGVAUTO-TRIES-CM.
Proceedings of the First Symposium SEGVAUTO-
TRIES-CM. Technologies for a Safe, Accessible and
Sustainable Mobility, (pp. 27-30). Madrid.
Volvo Car Corporation. (2019). Safety | Volvo Cars.
Retrieved October 25, 2019, from:
https://www.volvocars.com/intl/why-volvo/human-
innovation/future-of-driving/safety
WHO. (2018). Global status report on road safety 2018. In
Violence and Injury Prevention and Disability (VIP).
WHO Library Cataloguing-in-Publication Data.
Wilson, D., Kennedy Babu, C. N., & Tharumar, S. (2015).
Advance Driver Assistance System (ADAS) – Speed
Bump Detection. 2015 IEEE International Conference
on Computational Intelligence and Computing
Research (ICCIC).
Zadeh, L. A. (1988). Fuzzy Logic. (IEE, Ed.) Computer,
21(4), 83-93.
Zamora, V. M., Sipele, O., Ledezma Espino, A. I., &
Sanchis de Miguel, A. (2017). Intelligent Agents for
Supporting Driving Tasks: An Ontology-based Alarms
System. 3rd International Conference on Vehicle
Technology and Intelligent Transport Systems. Porto,
Portugal.
Zamora, V., Ledezma, A., & Sanchis, A. (2016). First
Symposium SEGVAUTO-TRIES-CM. Proceedings of
the First Symposium SEGVAUTO-TRIES-CM.
Technologies for a Safe, Accessible and Sustainable
Mobility, (pp. 23-26). Madrid.
Fuzzy Alarm System based on Human-centered Approach
455
