
Skeleton-based Action Recognition for Industrial Packing Process
Zhenhui Chen
1
, Haiyang Hu
1
, Zhongjin Li
1
, Xingchen Qi
1
,
Haiping Zhang
1
, Hua Hu
1,2
and Victor Chang
3
1
School of Computer Science and Technology, Hangzhou Dianzi University, Hangzhou, China
2
School of Information Science and Engineering, Hangzhou Normal University, Hangzhou, China
3
School of Computing & Digital Technologies, Teesside University, Middlesbrough, U.K.
Keywords: Skeleton-based Action Recognition, Image Classification, Industrial Packing Process.
Abstract: The applications of action recognition in real-world scenarios are challenging. Although state-of-the-art
methods have demonstrated good performance on large scale datasets, we still face complex practical
problems and inappropriate models. In this work, we propose a novel local image directed graph neural
network (LI-DGNN) to solve a real-world production scenario problem which is the completeness
identification of accessories during the range hood packing process in a kitchen appliance manufacturing
workshop. LI-DGNN integrates skeleton-based action recognition and local image classification to make
good use of both human skeleton data and appearance information for action recognition. The experimental
results demonstrate the high recognition accuracy and good generalization ability on the range hood packing
dataset (RHPD) which is generated in the industrial packing process. The results can meet the recognition
requirements in the actual industrial production process.
1 INTRODUCTION
Deep learning has been successfully applied in
computer vision, including image classification,
object detection, semantic segmentation and pose
estimation. Action recognition, which is a
fundamental task in the fields of video understanding
and intelligent monitoring, has also benefited from
the deep learning technique. However, it has not been
solved completely. As an attempt of using deep
learning in action recognition, it is the first time that
the two-stream model (Simonyan et al., 2014)
surpasses previous hand-crafted features methods. It
decomposes videos into spatial appearance and
temporal motions information by modelling
individual frame and stacked optical flow maps
respectively with CNNs then fusing the results of
these two streams. The concept of two-stream has a
profound impact on subsequent development in this
domain. Another important branch of approach to
CNN-based video modelling is represented by 3D
convolutional networks (C3D) (Tran et al., 2015)
introduced by Du Tran et al. They regarded whole
video as three-dimensional data and used 3D CNNs
to classify videos which is resemble 2D CNNs to
classify images. Notably, Carreira and Zisserman
introduced a model (I3D) (Carreira et al., 2017) that
combines two-stream processing and 3D
convolutions. I3D significantly improved action
recognition results on UCF101 (Soomro et al., 2012)
and HMDB51 (Kuehne et al., 2011). More recently,
kernel factorization strategy which replaced 3D
convolution with a 2D convolution (in space)
followed by a 1D convolution (in time) has shown its
unique advantages in reducing computation and
improving accuracy, such as P3D (Qiu et al., 2017),
R(2+1)D (Tran et al., 2018), S3D (Xie et al., 2018)
and CSN (Tran et al., 2019). The above methods are
all based on RGB frames or dense optical flow maps
of videos. In addition, skeleton-based approach plays
an important role in the field of action recognition.
Skeleton data of human can robustly accommodate
dynamic circumstances and complex backgrounds
which is benefit from the highly accurate depth
sensors (e.g. Kinetics) and pose estimation
algorithms. Skeleton-based action recognition can
pay attention to the posture and motion process more
intuitively and accurately of the human body. To
some extent, it is more suitable for both subtle and
complex action recognition.
The applications of action recognition and
detection in real-world scenarios are not as prevalent
36
Chen, Z., Hu, H., Li, Z., Qi, X., Zhang, H., Hu, H. and Chang, V.
Skeleton-based Action Recognition for Industrial Packing Process.
DOI: 10.5220/0009340800360045
In Proceedings of the 5th International Conference on Internet of Things, Big Data and Security (IoTBDS 2020), pages 36-45
ISBN: 978-989-758-426-8
Copyright
c
2020 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
as object detection and semantic segmentation. The
main reasons lie in three folds: First, existing models
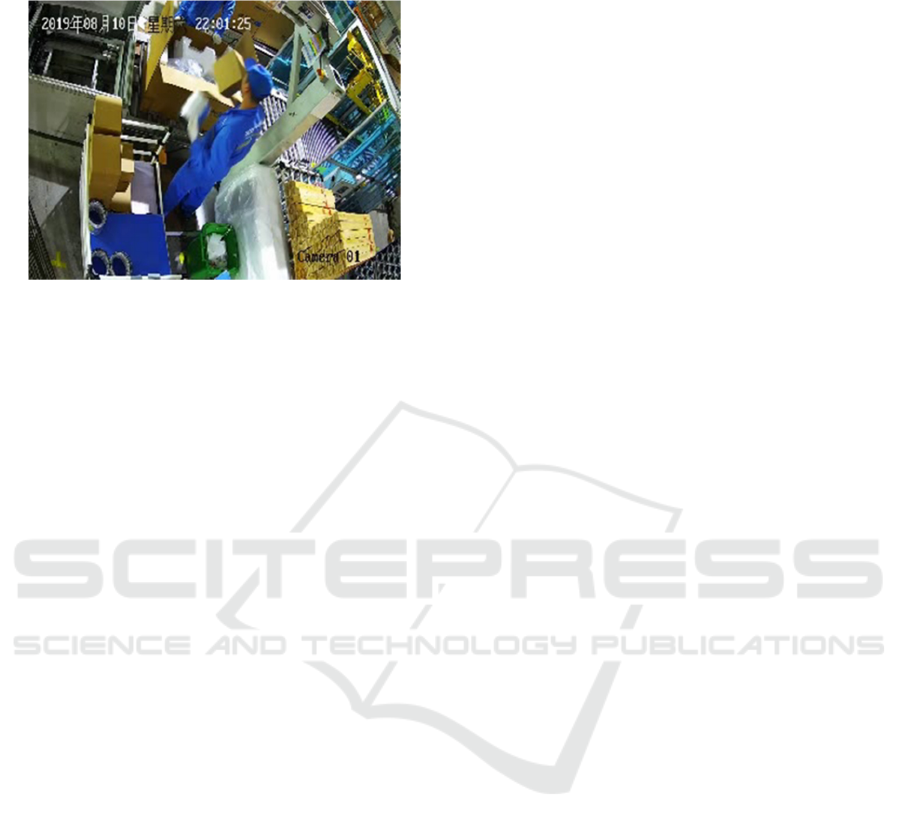
Figure 1: The range hood packing scene in the workshop of
kitchen appliance manufacturing enterprise Robam.
are not applicable to recognition of specific human
actions in real scenarios. Second, the video
processing is really computationally inefficient.
Finally, the models trained on current datasets cannot
be transfer directly into real-world tasks.
In this work, for solving the problem of
identifying the completeness of the accessories
during the range hood packing process of kitchen
appliance manufacturing enterprise Robam, we
investigate a novel method called Local Image
Directed Graph Neural Networks (LI-DGNN) to
model both human skeleton data and frames in a
surveillance video. Figure 1 shows the range hood
packing assembly line. Workers need to pack two
kinds of parts (connecting pipe and carton containing
tools) together into range hood packing box.
Although the numbers of range hoods and accessories
on this assembly line are recorded, there are still cases
where workers forgot to put accessories into the box.
In this way, the cost of finding the missing box later
is extremely high. The skeleton data is collected by a
real-time pose estimation algorithm AlphaPose.
Specifically, a skeleton-based action recognition
algorithm directed graph neural networks (DGNN)
(Shi et al., 2019) is embedded to classify worker’s
activities, then local images of worker's hands taken
from skeleton points are further analyzed to identify
what is in the hand with image classification model
ResNeXt (Xie et al. 2017).
In order to train our data-driven learning
framework and evaluate its advantage, we create a
range hood packing dataset (RHPD). The dataset
contains 4 different modalities of data: RGB videos,
2D skeleton data, local images and parts’ bounding
boxes data. We experimentally show that our
proposed LI-DGNN model outperforms other object
detection and action recognition methods in both cost
saving and accuracy on RHPD. The main
contributions of our work lie in three folds: (1) A
novel local image directed graph neural network is
proposed to solve the problem of accessories
deficiency recognition in a real-world industrial
production scenario. (2) We make a range hood
packing dataset (RHPD) to train and evaluate our
model which is finally deployed online. (3) On the
dataset, our model exceeds the mainstream action
recognition methods in both recognition accuracy and
generalization ability.
2 RELATED WORK
Before using deep learning to solve action recognition
problem, improved dense trajectories (iDT) (Wang
and Schmid, 2013) is universally acknowledged as
the state-of-the-art approach the state-of-the-art
which describes video as several hand-designed
features which follow dense trajectories, computed by
optical flow. The features include histogram of
oriented gradients (HOG), histogram of optical flow
(HOF) and motion boundary histogram (MBH).
MBH is a gradient-based feature, separately
computed on the horizontal and vertical components
of optical flow. Then an SVM classifier is used to
classify Fisher Vector encoded by those features.
Driven by the breakthrough of deep learning in
still-image recognition, some active researches have
been dedicated to the design of deep networks for
videos. Moreover, researchers have put considerable
efforts to utilize convolutional networks to model
videos. Two-stream model was introduced by
Simonyan and Zisserman, who proposed to extract
deep features from both RGB frames and dense
optical flow maps then fuse results predicted from
these two modalities features. Feichtenhofer et al.
enhanced the two-stream networks using the ResNet
architecture (He et al., 2016) and additional features
fusion between streams (Feichtenhofer et al., 2016).
Temporal segment networks (Wang et al., 2016) are
proposed to model long-range temporal structure over
the whole video by applying two-stream framework
to multiple video segments.
Another influential approach to learning
spatiotemporal features of video is represented by 3D
convolutional networks (C3D). Compared with 2D
CNNs, C3D has a stronger learning ability benefit
from its increased parameters. But it is difficult to
learn good features on small scale datasets. This has
been proved in the work of I3D, in which C3D was
re-implemented and pretrained on a larger video
Skeleton-based Action Recognition for Industrial Packing Process
37

dataset Kinetics, finetuned on UCF-101 and HMDB-
51, and better results have been obtained. I3D
proposed by Carreira and Zisserman combined two-
stream framework and 3D convolutions to model both
videos and optical flow maps. It also uses successful
ImageNet (Russakovsky et al., 2015) architecture
designs and even their parameters by inflating 2D
ConvNet to 3D. I3D raised the performance of action
recognition to a new level. Recently, in order to
accelerate training and convergence, kernel
factorization has become a new trend. Typically, Du
Tran et al. introduced R(2+1)D model which
decompose 3D convolution into a 2D spatial
convolution followed by 1D temporal convolution
within a ResNet architecture. It compensates for the
defect of 3D convolutions without losing
performance.
In addition to directly model video frames and
optical flow maps, extracting features of dynamic
skeletons to predict human actions has also become
an active research area. The dynamic skeleton data
represents human action as a sequence of coordinates
of the major body joints in videos. It can be easily
captured by the existing pose estimation algorithms
(Cao et al. 2017; He, Gkioxari et al. 2017; Fang et al.
2017) or the depth sensors. Skeleton-based action
recognition can focus on human body activities
without interferences of body scales changes, motion
speeds, camera viewpoints and complicated
background. The traditional methods of processing
skeleton data represent the human pose based on
hand-craft features. However due to the challenge of
manually designing a good feature extractor, which
impedes the way of yielding satisfying results.
Methods based on deep learning has been proved to
be superior to the traditional methods. There are
mainly three frameworks for deep-learning-based
methods: sequence-based methods, image-based
methods and graph-based methods.
Sequence-based methods use RNN-based
architectures (Shahroudy et al., 2016; Liu et al., 2016;
Song et al., 2017; Li et al., 2018) to model skeleton
data represented as a sequence of joints with designed
traversal strategy. Image-based methods mainly use
CNNs which are applied successfully in the area of
image classification (Du, Fu et al., 2015; Kim and
Reiter, 2017) to model a pseudo-image constructed
from skeleton data. Instead of representing the
coordinates of joints as sequences or pseudo-images,
it is more intuitive to organize the data as a graph with
joints as vertexes and bones as edges (Tang et al.,
2018; Shi, Zhang et al. 2018). Yan et al. investigated
graph convolutional networks (GCN) to model both
spatial and temporal information of dynamic skeleton
data which was constructed as a graph (Yan et al.
2018). The strategies of two-stream and adaptive
graph construction were integrated to GCN
framework for the purpose to boost the performance.
However, the existing approaches cannot
perfectly solve our practical problem. Most methods
based on RGB frames or optical flow are
computationally costly and high time consuming on
both training and inference stages. This impedes real-
time recognition in production deployment.
Moreover, these methods are also data-hungry. That
means it is difficult for the model to obtain a good
accuracy and generalization ability which was trained
on a small dataset. Skeleton data is naturally robust
and skeleton-based methods can capture subtle
human body movement stably. But it is at the expense
of discarding the important appearance contents and
background information. We proposed local image
directed graph neural networks (LI-DGNN) which
can capture both RGB contents and human skeleton
data by combining Local image classification and
skeleton-based action recognition. Our experiments
show that LI-DGNN framework yields best
performance and generalization ability on RHPD
compared with existing mainstream action
recognition approaches (specifically two-stream
networks, C3D, I3D, R(2+1)D, ST-GCN (Yan et al.
2018) and DGNN).
3 METHOD
In this section, we describe the LI-DGNN framework
which solved our problem of lacking the integrity
recognition of range hood accessories on the packing
line. Our model integrates directed graph neural
networks (DGNN) and local image classification
model ResNeXt which can capture both dynamic
skeleton data and appearance information to predict
human actions efficiently. The pipeline of the
proposed LI-DGNN demonstrated in the following
(Figure 2). First, skeleton data is extracted from a
video stream by pose estimation algorithm AlphaPose
in real time, then a sliding window is introduced
which will be performed on the skeleton sequence to
obtain available samples. The data from samples will
be fed into DGNN to predict current action. Finally
using ResNeXt model to classify local images which
are cropped from the area of skeletal points of the
worker’s hands for further identification. The final
integrity result is determined by the results of the two
models.
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
38
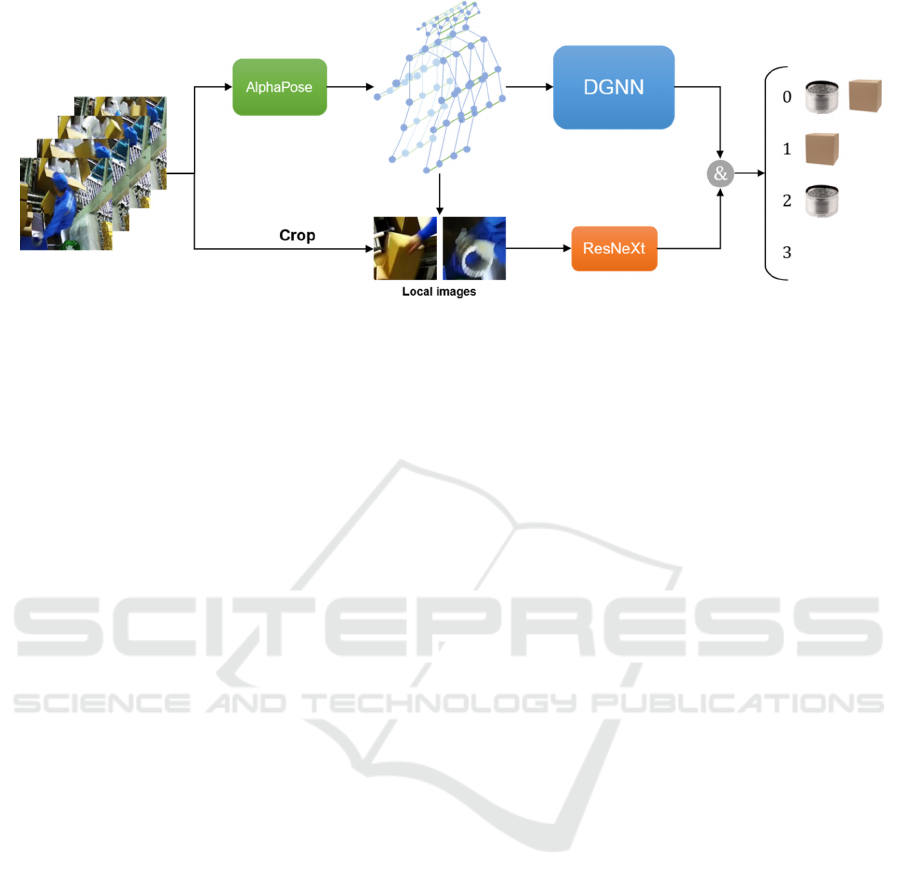
Figure 2: Pipeline of our Local Image Directed Graph Neural Networks (LI-DGNN) framework.
3.1 Regional Multi-person Pose
Estimation
To extract skeleton data accurately and fast, we use
AlphaPose model to detect the locations of human
skeleton key points on each frame of video stream.
AlphaPose is a regional multi-person pose estimation
framework (RMPE) (Fang et al. 2017) which is
introduced to facilitate pose estimation in the
presence of inaccurate bounding boxes and redundant
detections of human detectors from single-person
pose estimator (SPPE). There are primarily two
techniques contributing to this: symmetric spatial
transformer network (SSTN) and parametric pose
non-maximum-suppression (NMS).
3.1.1 Symmetric STN and Parallel SPPE
SSTN includes spatial transformer network (STN),
single-person pose estimator (SPPE) and spatial de-
transformer network (SDTN). SDTN is the inverse of
STN. STN receives human bounding boxes from
human detector, and SDTN generates pose proposals
(Figure 3).
The spatial transformer network (STN) (Jaderberg
et al., 2015) has demonstrated excellent performance
in selecting region of interests automatically. STN
embedded in networks performs a 2D affine
transformation. Therefore, the networks possess the
functions of cropping, translation, scaling and
rotation on the input feature map. It can learn how to
transform the shape of data by training. Parallel SPPE
is another single-person pose estimator branch. The
parameters of this branch are fixed in the training
phase. The output of this SPPE branch is directly
compared to labels of centre-located ground truth
poses and back-propagate centre-located pose errors
to the STN module. If the pose extracted by the STN
is not centre-located, the parallel branch will back-
propagate large errors. In this way, STN is
transformed to the correct region to extract high-
quality human body region images.
3.1.2 Parametric Pose NMS
For the purpose of eliminate redundant pose
estimations, non-maximum suppression (NMS)
method is required. Different from traditional NMS
methods, parametric pose NMS which embedded in
AlphaPose has four parameters in the eliminate
criterion function. The parameters are optimized to
achieve the maximal mAP for the validation set in
training phase. The parameters will be fixed once
convergence is achieved which will be used in the
testing phase.
The signs
(
,
)
,…,
(
,
)
denotes the
pose
, with m joints, where
and
are the
location and confidence score of joints separately.
AlphaPose defined pose distance metric
,
Λ, to calculate the pose similarity, and a
threshold is introduced as elimination criterion,
where Λ is a parameter set of function (∙). The
elimination criterion is demonstrated as follows
,
Λ,1
,
Λ, (1)
The output of (∙) should be 1, if (∙) is smaller than
. This further indicates that we should eliminate pose
, which is because of the redundancy with reference
pose
.
The definition of the distance function
,
is the sum of two distances, soft
matching of joints and spatial distance between parts.
Definition of the soft matching function is written as
follows
Skeleton-based Action Recognition for Industrial Packing Process
39

Figure 3: Structure of regional multi-person pose estimation model.
,
∑
∙
,
(
)
0
(2)
where (
) is a bounding box centred at
, and
each dimension of (
) is defined as 1/10 of the
original box
for pose
. The operation
deletes poses with low-confidence scores. The output
will be close to 1 if the confidence scores of two
corresponding joints are both fairly high. The number
of joints that match between poses is counted softly
by this distance. We define the spatial distance
between parts is as follows
,
∑
(3)
The final distance function can be written as
,
Λ,
,
,
(4)
where is a weight that balancing the two distances
and Λ
,
,
. These parameters were
determined in a data-driven manner.
3.2 Directed Graph Neural Networks
The raw skeleton data extracted from AlphaPose are
a sequence of frames, each of which contains a set of
joint coordinates. Directed graph neural networks
(DGNN) can capture spatial and motion information
of a sequence of skeleton frames to recognize human
action. The spatial information (the joints and bones)
are represented as the vertexes and edges within a
directed acyclic graph. The difference of coordinates
of joints and bones in consecutive frames are
regarded as the motion information with the same
graph. The spatial and motion information are fed into
a two-stream DGNN framework respectively to
extract features for action recognition.
3.2.1 Bone and Motion Information
The importance of combining the joint information
and bone information together has been emphasized
by previous works for skeleton-based action
recognition. In this algorithm, the bone is represented
as difference value of coordinates between two
connected joints. To extract both the movements of
joints and the deformations of bones, the movements
of joints is calculated as the difference of coordinates
along the temporal dimension and the deformation of
bones is represented as the difference of the vectors
for the same bone in consecutive frames.
Mathematically, the joint in raw data is represented as
a vector with two elements, i.e., its x-coordinate and
y-coordinate. There are two joints
(
,
)
and
(
,
)
, so the bone linked from
to
is
formulated as the difference of the two joint vectors,
i.e.,
,
(
,
)
. The movement of
joint in time is calculated as
. The
deformation of bone is defined similarly as
.
3.2.2 Graph Construction
DGNN needs a directed acyclic graph (DAG)
depicted by the skeleton data with the joints as
vertexes and bones as edges. The direction of each
edge is determined by the distance between the vertex
and the root vertex, where the vertex closer to the root
vertex points to the vertex farther from the root
vertex. This representation is intuitive since the
human body is naturally an articulated structure. The
joints closer to the center of the human body always
control adjacent joints which are farther from the
center. As with the spatial information modeling, the
motion information is represented as directed acyclic
graphs similarly to the movements of the joints as
vertexes instead of simply joints and the deformation
of bones as edges instead of the bones.
Formally, for each vertex
, defines the edge
heading to it as the incoming
and the edge
emitting from it as the outgoing edge
. For each
directed edge
,
and
denote the source vertex
and the target vertex of the edge respectively. In this
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
40
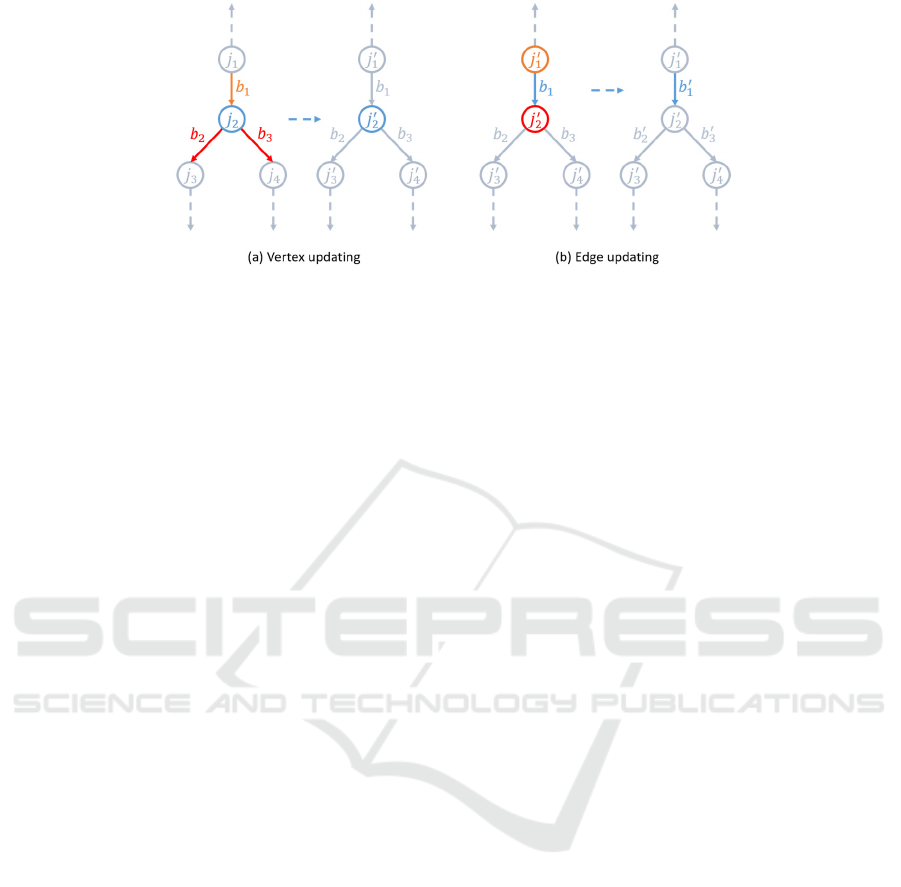
Figure 4: Directed graph network block, vertex and edge updating.
way, a skeleton-based frame can be formulated as a
directed graph (,), where is a set of vertexes
(joints) and is a set of directed edges (bones). A
skeleton-based video is a sequence of frames that can
be formulated as
,
,…,
, where means
the length of the video. Similarly, the motion
information of the skeleton-based video is
represented as a sequence of directed acyclic graphs
,
,…,
, where
(
,
),
,…,
and
,…,
. Then,
the spatial and motion graphs are fed into two-stream
DGNN respectively to make the prediction for the
action label. Finally, two networks are fused by
adding the output scores of the softmax layer.
3.2.3 Directed Graph Network Block
The directed graph network (DGN) block is the basic
block for a directed graph neural network; it includes
two updating functions,
and
, and two
aggregation functions,
and
. The updating
function is used to update the attributes of vertexes
and edges which is according to their adjacent edges
and vertexes (Figure 4). We use the aggregation
function to make aggregation of the attributes which
are contained in multiple incoming (outgoing) edges
connected to one vertex. The aggregation function
should stay invariant to the permutation of its inputs
since there are no apparent orders for these edges and
is able to take variable numbers of arguments, such as
the average pooling, max pooling and elementwise
summation. Formally, this process is designed in
details as follows:
(B
) (5)
(B
) (6)
(
,
,
) (7)
(
,
,
) (8)
Where the concatenation operation is denoted as [·].
and
are the updated versions of and ,
respectively.
For temporal information modelling, inspired by
the pseudo-3D and R(2+1)D CNN which model the
spatial information with the 2D convolutions and then
model the temporal information with the 1D
convolutions, after updating the spatial information of
joints and bones or the motion information of
movements of joints and deformations of bones in
each DGN block, we apply a 1D convolution along
the temporal dimension to model the temporal
information.
The whole DGNN model is similar to I3D model
which is based on two-stream framework and use 3D
CNNs to model RGB frames in spatial stream and
optical flow maps in temporal stream. DGNN also has
spatial and temporal streams. The RGB frames and
optical flow maps are replaced with joints and bones
data in the spatial stream and movements of joints and
deformations of bones in the temporal stream
respectively. Instead of 3D CNN block, DGNN use
directed graph network block and 1D convolution
along the temporal dimension to model spatio-
temporal information. Lastly, two stream networks
are fused by adding the output scores of the softmax
layer.
3.3 Local Image Classification
The human action class can be recognized by DGNN
with skeleton data. However, in this process, we do
not utilize appearance information of video.
Furthermore, even if the action class of the worker
who performed a specific task are identified, we
might also encounter a “feint” situation that the
workers do the same body movement without holding
the accessories in his hands. To further improve the
correct recognition rate and make use of the content
Skeleton-based Action Recognition for Industrial Packing Process
41
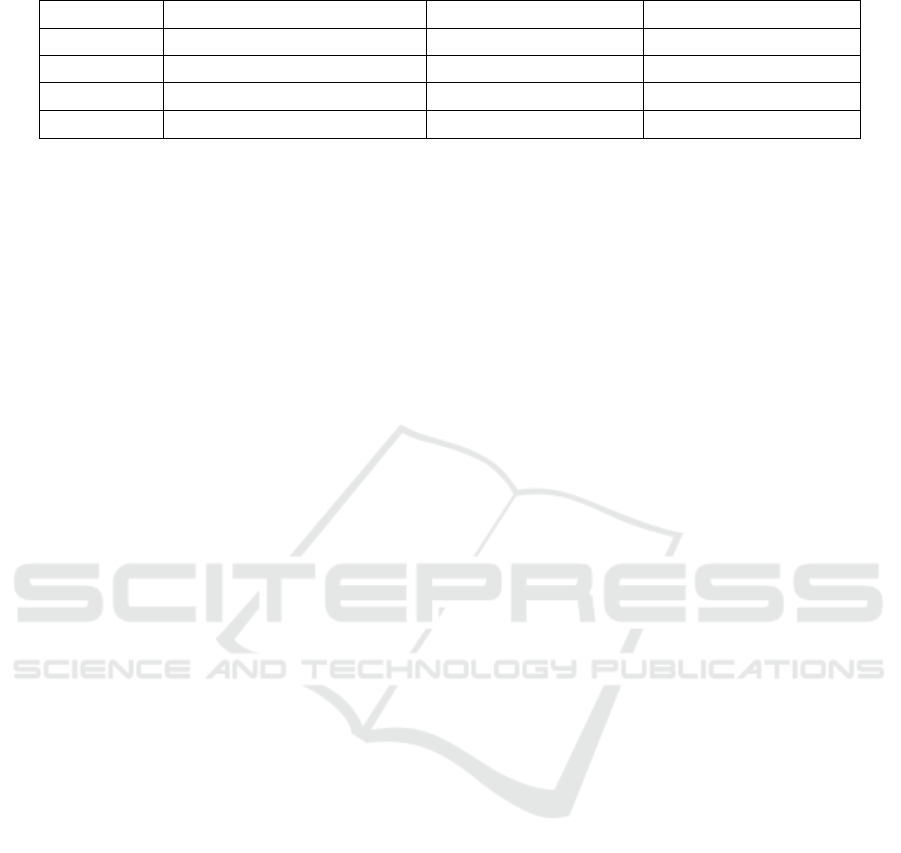
Table 1: Object detection and action recognition methods accuracy on RHPD.
Method Dataset mAP / top-1 (Line-1) mAP / top-1 (Line-2)
Faster RCNN RHPD accessories detection 92.1 86.6
YOLO v3 RHPD accessories detection 94.7 55.9
Two-Stream RHPD video 87.5 79.6
ST-GCN RHPD skeleton
96.4 94.3
information efficiently, we crop local images
according to coordinates of wrists in skeleton joints
estimated by AlphaPose, then classify the images to
identify whether there are accessories in his hands
and whether the worker put them into packing box.
The problem cannot be solved completely if only the
images of hands area of the worker are tracked and
recognized, which is due to various factors like
motion-induced blur, camera viewpoints, object
occlusion and interference of backgrounds. Only
combining action recognition and the local image
classification can identify that the accessories are
packed into the box, which has been proved in our
experiments.
There are many methods for image classification.
ResNeXt which was introduced by Xie et al. provides
the advantages of high accuracy and fast speed.
ResNeXt enhanced ResNet by substituting residual
block with grouped convolutions block and
introduced a super parameter “cardinality”. This
structure is similar to the inception block (Szegedy et
al., 2015) but there are only 1×1 and 3×3
convolutional kernels on the paths of the grouped
convolutions block. The value of cardinality
represents the number of paths in the block. The input
feature map is divided into cardinality paths
according to the channels, then the outputs of all paths
are aggregate by summation. This process is called
aggregated residual transformations. Specifically,
ResNeXt-50 (32 ×4d) is embedded into our LI-
DGNN framework. The value of cardinality is 32, and
4d represents each path receives 4 channels feature
maps in first grouped convolutions block.
4 EXPERIMENTS
4.1 The Range Hood Packing Dataset
The range hood packing dataset (RHPD) is made for
solving the problem of lacking integrity in the
recognition of accessories during range hood packing
process of kitchen appliance manufacturing
enterprise Robam. We recorded videos of the process
on two production lines by several cameras set up
with different viewpoints, then labelled them
manually, extracted human skeletons and perform
data augmentation. The dataset contains 4 different
modalities of data: RGB videos, 2D skeleton data,
local images and parts’ bounding boxes data. The data
of two assembly lines are separated and noted as line-
1 and line-2. The line-1 is used for training and
validation. The line-2 is only used in the test phase to
evaluate the generalization ability of model on the
other production lines.
Video Dataset. Video data contains 3000 clips of
worker’s actions during packing process. The actions
are divided into three classes (grab, feint and other)
which represent packing accessories, doing packing
action without accessories in hands and other actions
during packing respectively. Each clip is 25 FPS and
lasts about 5 seconds. There are 2000 clips in line-1
and 1000 clips in line-2.
Skeleton Dataset. Skeleton data is extracted by pose
estimation algorithm AlphaPose. The classes and
numbers are the same as video dataset. The length of
skeleton sequence detected in the whole clip is the
product of video time and frame rate. AlphaPose
predicts 18 joints for each person as labelled. Each
joint is represented as 2D coordinate (,) and
corresponding confidence score .
Local Image Dataset. There are 6000 images
cropped from local areas according to coordinates of
wrists in skeleton joints. The dataset contains 3
classes (connecting pipe, tool carton and other). Each
class has 2000 images and the size of them are all
350×350.
Accessories Detection Dataset. This is a dataset that
we originally created which uses object detection
methods to detect and track accessories in the whole
packing process. It contains 4000 images and
bounding boxes data of accessories in the images.
There two classes of objects we annotated
(connecting pipes and tool boxes). The images are
also captured from two production lines by several
cameras from different viewpoints.
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
42

Table 2: RGB-based and skeleton-based methods action recognition performance on RHPD.
Method Dataset Line-1 Line-2 Line-1(no feint) Line-2(no feint)
Two-Stream RHPD video 87.5 79.6 91.3 82.6
C3D RHPD video 73.7 63.8 85.2 77.4
I3D RHPD video 84.1 79.5 97.5 89.6
R(2+1)D RHPD video
89.9 81.2 98.9
85.7
ST-GCN RHPD skeleton - - 96.4 94.3
DGNN RHPD skeleton - - 98.5
96.2
4.2 Implementation Details
Data Augmentation. We use both spatial and
temporal jittering for augmentation. Specifically, we
apply random cropping, horizontal flipping, rotation
and colour jittering on videos and images. We
augment skeleton data with translation and rotation.
Temporal jittering is also applied during training by
randomly selecting a starting frame and decoding T
frames.
Training. All experiments are conducted on the
PyTorch deep learning framework (Paszke et al.,
2019). We train directed graph neural networks
(DGNN) and image classification model ResNeXt on
RHPD skeleton and local image dataset respectively.
For DGNN, we initialize the network weights from
the model pretrained on Kinetics-Skeleton dataset.
The batch size is 64. Stochastic gradient descent
(SGD) with momentum (0.9) is applied as the
optimization strategy. The learning rate is initialized
as 0.1 and reduced by a factor of 10 in epoch 30 and
60. The model is trained with 150 epochs. For
ResNeXt, we use ImageNet-pretrained model as base
networks. Then, we finetune it with the batch size
(32), learning schedule (Adam with an initial learning
rate 3e-4 and reduce by a factor 0.9) and training 1000
epochs.
4.3 Exploration Study
In this section, we examine the effectiveness of object
detection approach, action recognition method and
proposed LI-DGNN framework. The recognition
accuracy is used as the evaluation indicator.
4.3.1 Object Detection vs. Action
Recognition
For the problem of accessories deficiency
recognition, a direct way is to detect and track the
accessories in video stream. In this part of
experiments, we investigate and compare object
detection methods Faster RCNN (Ren et al., 2017),
YOLO v3 (Joseph and Ali, 2018) and action
recognition methods two-stream model, ST-GCN on
our RHPD. We report mAP for object detection
methods and Top-1 accuracy for action recognition
methods (Table 1). Since ST-GCN is skeleton-based
and cannot capture appearance information of
accessories, we merge grab and feint data into one
class. ST-GCN classifies only two classes of actions.
Table 1 shows the methods generally provide
good validation performance on line-1. But on the
line-2, YOLO v3 yields a poor generalization ability.
Faster RCNN and two-stream model yield 5.5% and
7.9% precision gaps between line-1 and line-2.
Notably, skeleton-based action recognition approach
ST-GCN has a best validation and test accuracy on
line-1 and line-2. The test accuracy is only 2.1%
lower than the validation accuracy. This shows ST-
GCN has a good generalization on other production
lines. In the following sections, we will focus on
investigating action recognition approaches.
4.3.2 RGB-based vs. Skeleton-based
In this section, we implement several mainstream
action recognition methods (two-stream, C3D, I3D,
R(2+1)D, ST-GCN and DGNN) and evaluate on the
RHPD video and skeleton datasets. These methods
are divided into two camps, RGB-based and skeleton-
based. Since the feint and grab actions are very
similar, we not only evaluate on the original datasets
(three classes), but also remove the feint class to
evaluate the model in order to eliminate the
interference of fake actions. The results are
summarized in Table 2.
On the original sets, we test the RGB-based
methods, but most of them do not perform very well.
R(2+1)D model yields best top-1 accuracy, which is
only 81.2% on line-2, though. After eliminating the
interference of fake actions, the overall accuracy has
been improved significantly. This indicates that
RGB-based methods are hard to capture small
differences of actions. Compared with RGB-based
methods, skeleton-based methods obtain more stable
recognition accuracy on both line-1 and line-2 sets
Skeleton-based Action Recognition for Industrial Packing Process
43
Table 3: Comparisons with mainstream action recognition methods on RHPD.
method dataset Line-1 Line-2
Two-Stream RHPD video 87.5 79.6
C3D RHPD video 73.7 63.8
I3D RHPD video 84.1 79.5
R(2+1)D RHPD video 89.9 81.2
Local Image RHPD local image 78.1 64.2
LI-DGNN RHPD skeleton
98.0 96.7
without feint actions. DGNN obtains best test
performance and 1.9% higher than ST-GCN on line-
2.
4.4 Local Image Is Necessary
Our experiments have proved that skeleton-based
action recognition methods have better recognition
performance and generalization ability to human
body actions in similar scenes. In this part, we
evaluate the benefits of local image strategy to
skeleton-based action recognition method DGNN,
and compare our LI-DGNN with other approaches on
the complete RHPD set. The results are shown in
Table 3. We report top-1 accuracy as the evaluation
indicator of the local image strategy. We crop local
images of the area of worker’s hands for each frame
of the video clip, then if more than 10 images in 25
consecutive frames are identified accessory class and
the wrist joint coordinate move towards the packing
box of the range hood, it is judged that the accessories
are successfully packed. Two accessories are tested
separately and the final result is average of the two
accessories.
There are several noteworthy observations. First,
using the local image strategy solely does not work
well, probably because of object occlusion, viewpoint
changes and the harsh condition that accessories must
be tracked continuously to determine packing
successfully. Second, our LI-DGNN model has a
surprisingly good effect in further verifying the
recognized human actions with local image strategy.
It raises the performance to 98.0% on line-1 and
96.7% on line-2. This result is similar to DGNN
perform on no feint set, which indicates local image
strategy can identify fake actions well in our model.
Third, LI-DGNN also has a good generalization
ability on line-2 set which the model does not seen
before. Our model can be easily migrated to other
new production lines for deployment. Finally,
compared with other mainstream RGB-based action
recognition methods, our LI-DGNN performs best on
the complete RHPD dataset and this performance can
meet the actual production requirements.
5 CONCLUSIONS
In this work, we proposed a novel Local Image
Directed Graph Neural Network (LI-DGNN) which
integrates Directed Graph Neural Networks and local
image classification model ResNeXt to make good
use of skeleton data and local images for action
recognition. In view of the actual production scenario
problem of identifying the completeness of the
accessories during the range hood packing process in
a kitchen appliance manufacturing workshop, we
made an RHPD dataset. We implement the
mainstream RGB-based and skeleton-based action
recognition methods, and train them on RHPD.
Compared through results by experiments, our LI-
DGNN framework shows the best recognition
accuracy on RHPD dataset and has good
generalization ability, which can meet the recognition
requirements in the actual production process.
ACKNOWLEDGEMENTS
This work was supported by the National Natural
Science Foundation of China (No. 61802095,
61572162), the Zhejiang Provincial Key Science and
Technology Project Foundation (No. 2018C01012).
Zhongjin Li is the corresponding author.
REFERENCES
Cao, Z., Simon, T., Wei, S, Sheikh, Y., 2017. Temporal
Segment Networks: Towards Good Practices for Deep
Action Recognition. IEEE Conference on Computer
Vision and Pattern Recognition, 1302-1310.
Carreira, J., Zisserman, A., 2017. Quo Vadis, Action
Recognition? A New Model and the Kinetics Dataset.
2017 IEEE Conference on Computer Vision and
Pattern Recognition, 4724-4733.
Du, Y., Fu, Y., Wang, L., 2015. Skeleton Based Action
Recognition with Convolutional Neural Network. 2015
3rd IAPR Asian Conference on Pattern Recognition,
579–583.
IoTBDS 2020 - 5th International Conference on Internet of Things, Big Data and Security
44

Fang, H., Xie, S., Tai, Y., Lu, C., 2017. RMPE: Regional
Multi-person Pose Estimation. IEEE International
Conference on Computer Vision, 2353-2362.
Feichtenhofer, C., Pinz, A., Zisserman, A., 2016. Deep
Residual Learning for Image Recognition. IEEE
Conference on Computer Vision and Pattern
Recognition, 1933-1941.
He, K., Gkioxari, G., Dollár, P., Girshick, R. B., 2017.
Mask R-CNN. IEEE International Conference on
Computer Vision, 2980-2988.
He, K., Zhang, X., Ren, S., Sun, J., 2016. Deep Residual
Learning for Image Recognition. IEEE Conference on
Computer Vision and Pattern Recognition, 770-778.
Jaderberg, M., Simonyan, K., Zisserman, A., Kavukcuoglu,
K., 2015. Spatial Transformer Networks. Conference
on Neural Information Processing Systems, 2017–
2025.
Joseph, R., Ali, F., 2018. YOLOv3: An Incremental
Improvement. arXiv preprint arXiv: 1804.02767.
Kim T. S., Reiter, A., 2017. Interpretable 3d Human Action
Analysis with Temporal Convolutional Networks.
Computer Vision and Pattern Recognition Workshops,
1623–1631.
Kuehne, H., Jhuang, H., Garrote, E., Poggio, T., Serre, T.,
2011. HMDB: A Large Video Database for Human
Motion Recognition. IEEE International Conference
on Computer Vision, 2556-2563.
Li, L., Zheng, W., Zhang, Z., Huang, Y., Wang, L., 2018.
Skeleton-Based Relational Modeling for Action
Recognition. arXiv preprint arXiv:1805.02556.
Liu, J., Shahroudy, A., Xu, D., Wang, G., 2016. Spatio-
Temporal LSTM with Trust Gates for 3d Human
Action Recognition. European Conference on
Computer Vision, 816-833.
Paszke, A., Gross, S., Massa, F. et al., 2015. PyTorch: An
Imperative Style, High-Performance Deep Learning
Library. Advances in Neural Information Processing
Systems, 8024-8035.
Qiu, Z., Yao, T., Mei, T., 2017. Learning Spatio-Temporal
Representation with Pseudo-3D Residual Networks.
2017 IEEE Conference on Computer Vision and
Pattern Recognition, 5534-5542.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bernstein,
M. S., Berg, A. C., Li, F., 2015. ImageNet Large Scale
Visual Recognition Challenge. International Journal of
Computer Vision, 211-252.
Shahroudy, A., Liu, J., Ng, T., Wang, G., 2016. NTU
RGB+D: A Large Scale Dataset for 3d Human Activity
Analysis. IEEE Conference on Computer Vision and
Pattern Recognition, 1010-1019.
Shi, L., Zhang, Y., Cheng, J., Lu, H., 2018. Non-Local
Graph Convolutional Networks for Skeleton-Based
Action Recognition. arXiv preprint arXiv:1805.07694.
Shi, L., Zhang, Y., Cheng, J., Lu, H., 2019. Skeleton-Based
Action Recognition with Directed Graph Neural
Networks. IEEE Conference on Computer Vision and
Pattern Recognition, 7912-7921.
Simonyan, K., Zisserman, A., 2014. Two-Stream
Convolutional Networks for Action Recognition in
Videos. Annual Conference on Neural Information
Processing Systems 2014, 568-576.
Song, S., Lan, C., Xing, J., Zeng, W., Liu, J., 2017. An End-
to-End Spatio-Temporal Attention Model for Human
Action Recognition from Skeleton Data. AAAI
Conference on Artificial Intelligence, 4263-4270.
Soomro, K., Zamir, A. R., Shah, M., 2012. A Dataset of 101
Human Actions Classes from Videos in The Wild.
arXiv preprint arXiv:1212.0402.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S. E.,
Anguelov, D., Erhan, D., Vanhoucke, V., Rabinovich,
A., 2015. Going deeper with convolutions. IEEE
Conference on Computer Vision and Pattern
Recognition, 1-9.
Tang, Y., Tian, Y., Lu, J., Li, P., Zhou, J., 2018. Deep
Progressive Reinforcement Learning for Skeleton-
Based Action Recognition. IEEE Conference on
Computer Vision and Pattern Recognition, 5323-5332.
Tran, D., Bourdev, L. D., Fergus, R., Torresani, L., Paluri,
M., 2015. Learning Spatiotemporal Features with 3D
Convolutional Networks. 2015 IEEE International
Conference on Computer Vision, 4489-4497.
Tran, D., Wang, H., Torresani, L., Feiszli, M., 2019. Video
Classification with Channel-Separated Convolutional
Networks. arXiv preprint arXiv: 1904.02811.
Tran, D., Wang, H., Torresani, L., Ray, J., LeCun, Y.,
Paluri, M., 2018. A Closer Look at Spatiotemporal
Convolutions for Action Recognition. 2018 IEEE
Conference on Computer Vision and Pattern
Recognition, 6450-6459.
Wang, H., Schmid, C., 2013. Action Recognition with
Improved Trajectories. IEEE International Conference
on Computer Vision, 3551-3558.
Wang, L., Xiong, Y., Wang, Z., Qiao, Y., Lin, D., Tang, X.,
Gool, L. V., 2016. Temporal Segment Networks:
Towards Good Practices for Deep Action Recognition.
European Conference on Computer Vision, 20-36.
Xie, S., Girshick, R. B., Dollár, P., Tu, Z., He, K., 2017.
Aggregated Residual Transformations for Deep Neural
Networks. IEEE Conference on Computer Vision and
Pattern Recognition, 5987-5995.
Xie, S., Sun, C., Huang, J., Tu, Z., Murphy, K., 2018.
Rethinking Spatiotemporal Feature Learning for Video
Understanding. European Conference on Computer
Vision, 318-335.
Yan, S., Xiong, Y., Lin, D., 2018. Spatial Temporal Graph
Convolutional Networks for Skeleton-Based Action
Recognition. AAAI Conference on Artificial
Intelligence,
7444-7452.
Skeleton-based Action Recognition for Industrial Packing Process
45
