
Verifying OCL Operational Contracts via SMT-based Synthesising
Hao Wu and Joseph Timoney
Computer Science Department, Maynooth University, Ireland
Keywords:
OCL Synthesis, Call Sequence, SMT.
Abstract:
The set of operational contracts written in the Object Constraint Language can be used to describe the be-
haviour of a system. These contracts are specified as pre/post conditions to constrain inputs and outputs
of operation calls defined in a UML class diagram. Hence, a sequence of operation calls conforming to
pre/postconditions is crucial to analyse, verify and understand the behaviour of a system. In this paper, we
present a new technique for synthesising property-based call sequences from a set of operational contracts.
This technique works by reducing a synthesis problem to a satisfiability modulo theories (SMT) problem. We
distinguish our technique from existing approaches by introducing a novel encoding that supports high levels
of expressiveness, flexibility and performance. This encoding not only allows us to synthesise call sequences
at a much larger scale but also maintains high performance. The evaluation results show that our technique is
effective and scales reasonably well.
1 INTRODUCTION
UML models are central to Model Driven Engineer-
ing (MDE) based software development. They pro-
vide software engineers with different ways of visu-
alising structural and behavioural aspects of a system.
For example, UML class diagrams are used to depict
entities, attributes and relationships in a system. On
the other hand, Object Constraint Language (OCL)
is designed to describe formal rules or queries that
cannot be captured by UML models. For example,
a pre/postcondition written in OCL can constrain the
inputs and outputs of an operation call defined in a
class diagram. The combination of UML and OCL
is widely used for modelling a software system not
only because of their expressiveness but also formal-
ity. Hence, the correctness of models annotated with
OCL are crucial for MDE based software develop-
ment. However, the tasks of verifying UML along
with OCL constraints remain a challenge in the mod-
elling community.
Though numerous approaches have been proposed
to tackle this challenge (Berardi et al., 2005; B
¨
uttner
et al., 2012; Cabot et al., 2014; Wille et al., 2012),
many of them focus on verifying UML class diagrams
annotated with a set of OCL class invariants (struc-
tural aspects of a system). In general, OCL opera-
tional contracts (behavioural aspects of a system) are
specified as pre/post conditions of an operation call.
These pre/postconditions capture constraints over a
set of call sequences and system states. For example,
finding a sequence with respect to pre/postconditions
is the same as checking whether a valid system
state can be derived. In this paper, we introduce a
novel technique that allows us to verify OCL opera-
tional contracts via synthesising property-based call
sequences. Our technique works by reducing it to a
satisfiability modulo theories (SMT) problem. More
specifically, our synthesis technique provides a high
level of expressiveness and flexibility for not only
data types but also property-based synthesis.
In general, our synthesis constraints are in first-
order form and this gives us several advantages; (1)
We can perform efficient satisfiability checks by tak-
ing full advantages of SMT first-order reasoning ca-
pabilities. (2) It allows us to specify queries and prop-
erties over unrolled states without regenerating the
synthesis constraints.
Contributions. In particular, we first present our
initial idea in (Wu, 2019) and we now show our full
technical details including detailed SMT-encodings in
this paper. Hence, our contributions of this paper are
summarized as follows:
1. We design our synthesis constraints to be expres-
sive enough so that users can use quantified in-
variants and queries over a collection of transitions
(Section 4).
Wu, H. and Timoney, J.
Verifying OCL Operational Contracts via SMT-based Synthesising.
DOI: 10.5220/0009340602490259
In Proceedings of the 8th International Conference on Model-Driven Engineering and Software Development (MODELSWARD 2020), pages 249-259
ISBN: 978-989-758-400-8; ISSN: 2184-4348
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
249

2. We then introduce a set of different properties
based on an intermediate representation (Section
5). To optimise overall formula size and perfor-
mance, we also introduce three simplification rules
(Section 6).
3. We evaluate our technique on a benchmark but with
much larger sequences, and show that our tech-
nique outperforms existing approaches in terms of
expressiveness, flexibility and performance (Sec-
tion 7).
2 A RUNNING EXAMPLE
In this section, we introduce a real world scenario
that a software engineer uses a UML class diagram
(as shown in Figure 1) to model an online shopping
system. This example will be used throughout this
paper to illustrate our approach. Except for the at-
tributes and classes depicted in Figure 1. This en-
gineer also defines 5 operation calls to further con-
strain the model. These operation calls allow users
to change their shoppingcart, checkout, confirm and
cancel
1
their orders. For each operation call, the
corresponding pre or postcondition(s) are also de-
fined. For example, the checkout operation requires a
shoppingcart to be non-empty before a user can sub-
mit an order.
In general, it is very easy to introduce a mistake or
omit a condition when writing a specification. Unfor-
tunately, the class diagram presented in Figure 1 also
contains a mistake. The operational contracts here al-
low a scenario that after an order is placed and con-
firmed, users can still modify their orders. In fact, this
mistake is quite difficult to be identified. However,
with the help of visualised call sequences this mistake
becomes obvious. It can now be spotted in the synthe-
sised call sequence shown in Figure 2. One way to fix
this mistake is to add sel f .cart.con f irmed = f alse as
precondition for both addItem and removeItem.
3 BACKGROUND
Before presenting our techniques, we first review the
background here. Formally, synthesising a call se-
quence G
hk,Pi
from OCL operational contracts is de-
fined in (Wu, 2019), and it is shown as follows:
G
hk,Pi
def
= Φ ∧ Ψ
where k is the length of the sequence, P describes a set
of properties, Φ describes synthesis constraints and Ψ
1
Due to space restrictions, the operation cancel is not
shown here.
is a set of property constraints. Visually, a sequence
G
hk,Pi
can be viewed as follows:
G
hk,Pi
: S
0
δ
1
−−−→ S
1
δ
2
−−−→ S
2
δ
3
−−−→ S
3
···
δ
k
− → S
k
where each δ
i
in a sequence represents an opera-
tion call selected from the set of operation calls (de-
noted as ∆), and each S
j
is a (system) state that is
triggered by an δ
i
in the previous state S
j−1
. S
0
is the
initial state and S
k
is the final state that is derived by
the kth operation call (δ
k
) in a sequence
2
. In each
state S
j
, there is exactly one operation call δ
i
invoked
to make the transition to the next state S
j+1
. There-
fore, this transition captures all possible sequences
that have a length of k.
For example, we can define a synthesised call se-
quence G
h6,Pi
(with a length of 6) for our online shop-
ping model in Figure 1 with the following properties:
• addItem and removeItem cannot be called after
con f irmOrder.
• each operation must be called at least once.
• checkout and con f irmOrder must be part of the
sequence.
To check whether there exists a counter-example, we
negate Ψ and discover a sequence (shown in Figure
2) showing a scenario that a customer may add more
items after confirming an order.
4 BASIC SYNTHESIS
Our synthesis constraints (Φ) consists of a series of
formulas φ
hi, ji
and each encodes a δ
i
(ith operation
call) including pre/post conditions at state j.
Since a pre/post condition may refer to a set of
specific features in a class diagram such as attributes
and collections, our synthesis constraints also encode
those features. In fact, the encoding of a feature is
similar to the encoding described in (Wu, 2019). To
be precise, we use a feature function to encode an at-
tribute or a collection data type at a specific state. For
example, F
id
(m, 2) = 1001 means that a feature func-
tion F
id
sets the attribute id of an object m
3
to 1001
at state 2.
Quantified Invariants. To encode a class invariant,
we use a quantified formula. This encoding allows us
to reduce the number of individual unrolled class in-
variants in each state to a single quantified formula.
For example, the class invariant in Figure 1 is repre-
sented using the following formula:
2
Note that δ
k
is called in S
k−1
and triggers S
k
. Thus, a
call sequence of length of k creates a total of k + 1 states.
3
Each object is encoded as a unique integer. Here, m
represents an instance of MembershipCard.
MODELSWARD 2020 - 8th International Conference on Model-Driven Engineering and Software Development
250

Figure 1: A UML class diagram annotated with a set of OCL operational contracts models an online shopping system. inv
here specifies a class invariant. pre and post specify preconditions and postconditions of an operation respectively. @pre here
denotes an object from previous state.
Figure 2: A call sequence shows a scenario that a customer may modify items after confirming an order.
∀c1 : Customer,c2 : Customer,s : INT.
c1 6= c2
⇒
F
card
(c1, s) 6= F
card
(c2, s)
where s here is constrained as 0 ≤ s ≤ k. This formula
captures the semantics that no two customers (c1 and
c2) can have the same card number in any state (de-
noted by s)
4
. This encoding gives us an advantage
of producing compact formulas regardless of the in-
creasing number of sequence length (k).
Queries. Similarly, users can also use quantifiers to
specify queries over a set of states for specific purpose
checking without affecting synthesis constraints. This
significantly improves flexibility for users to debug
and analyse a sequence without explicitly unrolling
a query in each state. For example, a user can use
the following query to check whether the number of
items in a shoppingcart (in Figure 1) from a section of
states is non-negative (0 ≤ i ≤ j).
∀s : INT.
i ≤ s ≤ j
⇒
Size(items, s) ≥ 0
where Size is defined as: (Bag INT) × INT → INT
and it returns the number of elements in a collection
at a particular state s. items encodes a collection of
objects that are represented as a set of unique integers.
The following diagram shows this query from state i
to j. Note that the affected calls of this call sequence
are δ
i
, δ
i+1
. .. δ
j
.
S
0
δ
1
−−−→ . . .S
i
δ
i+1
... δ
j
−−−−−−−−→ S
j
| {z }
query:|items|≥0
δ
j+1
... δ
k
−−−−−−−−−→ S
k
Synthesis Constraints. To formally construct syn-
thesis constraints, we simply conjoin each δ
i
’s
4
Both c1 and c2 have their own unique object ids.
pre/post conditions at state j with class invariants.
In general, our synthesis constraint is in first-order
form and it allows us to use unbounded collections
and quantified invariants. For example, the two post-
conditions defined for the 1st operation addItem() in
Figure 1 at state j is encoded as follows:
φ
h1, ji
def
=
∃x : INT.
Select(items, x, j)
= item0
∧
Size(items, j) = Size(items, j − 1) + 1
We use an existential quantifier to encode the includes
operation, x denotes a specific position in a collec-
tion and j refers to current state and j − 1 to previous
state. Therefore, a transition can be established be-
tween two states via our synthesis constraints.
4.1 Transitions
Typically a transition from state S
j−1
to S
j
is triggered
by a single operation call encoded by φ
hi, j−1i
, assum-
ing that no two calls can occur concurrently. To en-
code the transitions, we introduce a control variable
cv
hi, ji
for each φ
hi, ji
. Each control variable controls
the selection of its corresponding φ
hi, ji
. More specif-
ically, we constrain each control variable to be either
0 or 1. We say that φ
hi, ji
is enabled (δ
i
at state j is
called) only if cv
hi, ji
is assigned to 1. In this way, we
now can constrain the number of a selected operation
calls at state j. Therefore, the following formula ex-
press the meaning of selecting exactly one operation
call from ∆ at each state.
Verifying OCL Operational Contracts via SMT-based Synthesising
251

items:size
post2 post4
post5 post6
shoppingcart:
submitted
shoppingcart:
confirmed
Figure 3: The dependency graph for postconditions defined
in Figure 1.
|∆|
^
i=1
k
^
j=0
cv
hi, ji
= 1
⇒ φ
hi, ji
∧
k
^
j=0
|∆|
∑
i=1
cv
hi, ji
= 1
(1)
where cv
hi, ji
∈ {0, 1}. On the other hand, if a control
variable at state j is set to 0, then the corresponding
operation call δ
i
at that state is not selected. This im-
plies that the attribute (affected by δ
i
) of an object o
(specified in a postcondition) has not been changed
(since we have not selected δ
i
). To compute the set
of unchanged attributes, we work out the number of
postconditions that affect an object’s attributes via
constructing a dependency graph as illustrated in Fig-
ure 3.
Let D be the set of nodes representing postcondi-
tions in a dependency graph. Each d ∈ D is a specific
postcondition of δ
i
. We let T be the set of nodes that
each d depends on. Now we can use the Formula 2 to
express the set of attributes that have been changed
5
.
k
^
j=1
^
d∈D
cv
h[d], ji
= 0
⇒
^
t∈T
F
[t]
(o, j) = F
[t]
(o, j − 1)
(2)
where F denotes a feature function and [ ] maps a node
to the ith operation call or a specific feature. For ex-
ample, we can construct a dependency graph (shown
as Figure 3) for our online shopping model. The post-
condition 2 and 4 (post2 and post4 in Figure 3) in
Figure 1 both depend on the size of the object items
6
(since they change the number of items). We can say
that when both postconditions 2 and 4 are not applied,
then the number of items is not affected.
5
Though the rule here only works on explicit changes,
implicit ones can be further extracted using the technique
presented in (Niemann et al., 2015).
6
Note that the operations: includes and excludes only
check the content of a collection rather than modifying its
content.
5 PROPERTY-BASED SYNTHESIS
In this section, we introduce a technique that allows
us to synthesise a call sequence with respect to a set of
properties. This technique uses a boolean matrix M as
an intermediate representation for separating the syn-
thesis constraints (Φ) from the property constraints
(Ψ). Each property constraint (ψ
i
) is then applied to
constrain this boolean matrix. This provides a degree
of flexibility that enables editing or expanding prop-
erties over a call sequence without affecting our syn-
thesis constraints. This matrix M is shown in Figure
4. Essentially, this matrix captures all available oper-
ation calls from the initial state (S
0
) to state S
k−1
. The
row of M represents all possible operation calls. The
column of M indicates the transitional states. Each
entry cv
hi, ji
in the matrix is a control variable that de-
notes an operation call δ
i
at state j. For example, the
call sequence in Figure 2 is represented in the matrix
in Figure 5.
5.1 Called-before
In many scenarios, a specific order of a series of calls
is critical for verifying the behaviours of a system.
For example, the addItem operation call in Figure 1
must be called-before the con f irmOrder. Many po-
tential problems in a design can be identified when
an incorrect order is presented. In this subsection, we
introduce a called-before property.
Given two operation calls δ
a
and δ
b
, the no-
tation δ
a
→ δ
b
defines a constraint that δ
a
must
be called-before δ
b
. For example, addItem →
con f irmOrder defines that addItem must be invoked
before con f irmOrder. In order to encode this con-
straint, we look at it in an opposite way. A called-
before relation δ
a
→ δ
b
implies that an operation call
δ
b
must not be called before an operation call δ
a
, that
is δ
b
6→ δ
a
. Thus, our encoding here works by block-
ing the possibilities of an operation call δ
b
called be-
fore δ
a
. More precisely, given a called-before se-
quence G
cb
:
G
cb
: δ
1
→ δ
2
→ δ
3
→ . . . δ
x
. . . → δ
n
Let x denote the xth δ in G
cb
7
. We now can start
from the nth δ in G
cb
and prevent each δ before nth
position from being called until the 1st δ is reached.
This constraint applies through from the initial state to
the second last state since the number of states (where
an operation is being called) is bounded from 0 to k −
7
Note that δ
1
here denotes the 1st operation call in G
cb
.
That does not mean it also denotes the 1st operation call in
∆.
MODELSWARD 2020 - 8th International Conference on Model-Driven Engineering and Software Development
252

S
0
S
1
... S
k−1
δ
1
cv
h1,0i
cv
h1,1i
. . . cv
h1,k−1i
δ
2
cv
h2,0i
cv
h2,1i
. . . cv
h2,k−1i
δ
3
cv
h3,0i
cv
h3,1i
. . . cv
h3,k−1i
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
δ
n
cv
hn,0i
cv
hn,1i
. . . cv
hn,k−1i
Figure 4: A boolean matrix M.
S
0
S
1
S
2
S
3
S
4
S
5
addItem 1 1 0 0 0 0
removeItem 0 0 0 0 1 0
checkout 0 0 1 0 0 0
con f irmOrder 0 0 0 1 0 0
cancel 0 0 0 0 0 1
Figure 5: A matrix representing the call sequence in Figure
2.
1 (excluding the last state) for a sequence that has a
length of k.
2
^
x=n
k−2
^
i=0
cv
hJxK,ii
= 1
⇒
1
^
y=x−1
k−1
^
j=i+1
cv
hJyK, ji
= 0
(3)
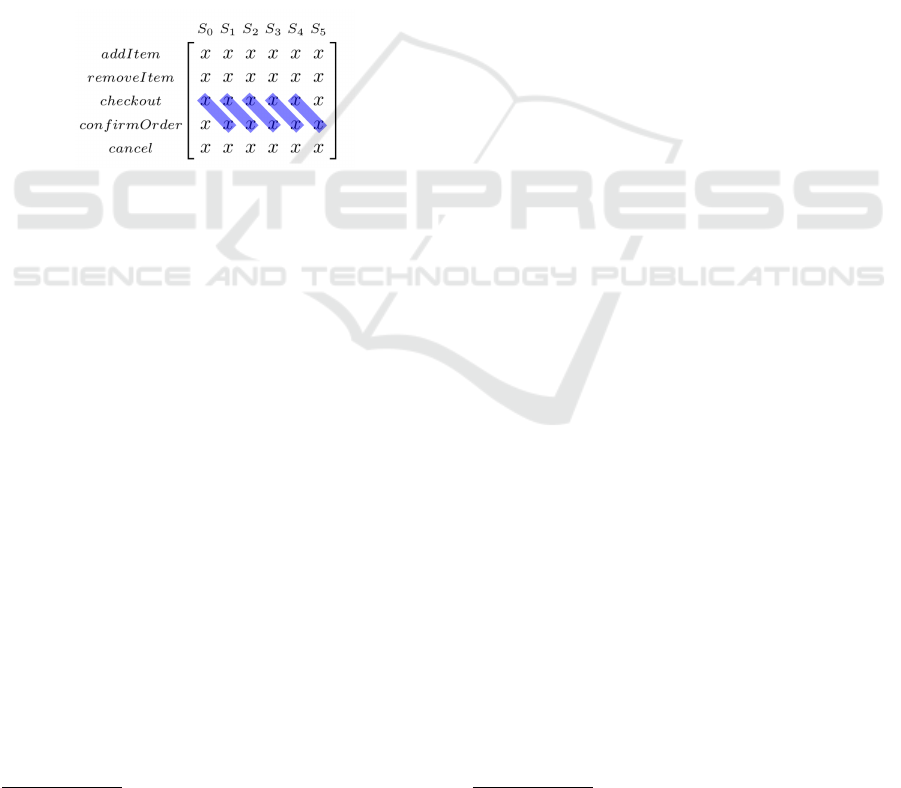
Formula 3 captures this constraint and JK here maps
the ith δ in G
cb
to the jth δ in ∆. For exam-
ple, Figure 6 shows an example of con f irmOrder 6→
(addItem ∧ removeItem). That is, if con f irmOrder
(blue shaded area) is called at state S
2
, then addItem
and removeItem (red shaded area) cannot be called
from state S
3
to S
5
.
S
0
S
1
S
2
S
3
S
4
S
5
addItem x x x x x x
removeItem x x x x x x
checkout x x x x x x
con f irmOrder x x x x x x
cancel x x x x x x
Figure 6: An example matrix shows that con f irmOrder is
called at state 2. This implies no addItem or removeItem
should be called in the subsequent states. Each x in the
matrix represents a control variable. The control variables
in the red shaded area are switched off while the control
variable in the blue shaded area is switched on.
5.2 Called Exactly n Times
In general, we use Formula 4 to capture that an opera-
tion call occurs exactly n times within a sequence. Let
cv
hc, ji
denote a control variable that represents the cth
operation call at state j. We can count the number of
control variables cv
hc, ji
from the initial state to state
k − 1, and constrain this number to be n. Formula 4
provides a general form for other numeric constraints
such as ensuring that an operation call must occur in a
sequence at least n or no more than n times. This can
be achieved by setting = in the Formula 4 to ≥, ≤, >
and <.
k−1
∑
j=0
cv
hc, ji
= n, where c is a constant and n ≤ k − 1.
(4)
5.3 Full Reachability
We can easily extend the called exactly n times prop-
erty to check whether every single operation call δ
i
defined in ∆ can be reached by some operations within
a sequence at least once. We say such a sequence has
full reachability. This is achieved by using Formula
5. This property is quite useful because it allows users
to synthesise a call sequence that covers each opera-
tion call at least once. Therefore, it also requires a
sequence call to be a minimum length of |∆|.
|∆|
^
i=1
k−1
_
j=0
cv
hi, ji
= 1, where k ≥ |∆|. (5)
For Formula 5, we can also fix j to specifically check
whether an operation call can be reached at the spe-
cific position in a sequence. For example, removeItem
cannot be placed at the beginning of a sequence, if a
shoppingcart in the initial state is empty.
5.4 Partial Sequence
In many situations, users may like to have a property
that they can perform analysis on a certain fixed por-
tion of a call sequence. We say such sequence is par-
tially known or a partial sequence. A partial sequence
is a subsequence L = hδ
1+i
, . . . , δ
m+i
i of a sequence
S = hδ
1
, δ
2
, . . . , δ
k
i such that i ≥ 0 and m + i ≤ k.
This property requires that every synthesised call se-
quence must contain that partial sequence. Thus, this
allows users to analyse the behaviours of a system un-
der a particular portion of a call sequence. For ex-
ample, Figure 2 shows that this synthesised call se-
quence must contain a partial sequence checkout and
con f irmOrder.
Formula 6 expresses our partial sequence prop-
erty. Let L denote a partial sequence and |L| ≥ 1 that
consists of a series of operation calls hδ
1
, δ
2
, . . . , δ
k
i.
For each δ
a
∈ L at state i encoded by a control vari-
able cv
ha,ii
, we ask the SMT solver to select this con-
trol variable starting from the initial state (i = 0) until
the length of a partial sequence can no longer fit in the
remaining states. This encodes all possible ways that
Verifying OCL Operational Contracts via SMT-based Synthesising
253
a partial sequence L could happen within a sequence.
We then make sure at least one of them is chosen by
the solver.
m
_
i=0
|L|
^
δ
a
∈L
cv
ha,ii
= 1, where m = k − |L| + 1. (6)
For example, we let L = hcheckout, con f irmOrderi
be a partial sequence and generate a call sequence
that must contain L. Each blue shaded area in Fig-
ure 7 represents a way of selecting this partial se-
quence by enabling the corresponding control vari-
ables. In addition, Figure 7 shows that there is a total
of 5 ways of synthesising this partial sequence L. Se-
lecting any one of the five ways satisfies the partial
sequence property. Therefore, the disjunction in For-
mula 6 makes sure that at least one of the possible
subsequences is selected.
Figure 7: There are 5 possible ways of synthesising a call
sequence (a length of 6) that contains a partial sequence
consisting of checkout and con f irmOrder for the running
example in Figure 1. Here, each x represents a control vari-
able.
6 FORMULA SIMPLIFICATIONS
Removing Invariants.We notice that in many cases
a class invariant may not affect the features used by
the postconditions of an operation. In other words, a
class invariant may not depend on the features that a
postcondition depends on. In this case, we can safely
remove this class invariant from the model. The gen-
eral rule here is to construct two dependency graphs
for postconditions (G
1
) and invariants (G
2
). If a fea-
ture f that appears in G
2
does not appear in G
1
, then
we can remove all the class invariants that depend on
this f
8
. Otherwise, we reduce each class invariant to
a single quantified formula.
For example, the class invariant in Figure 1 de-
pends on the attribute id in the membership class.
However, id does not appear in the dependency graph
in Figure 3. Therefore, we can remove this class in-
variant from the synthesis constraints.
8
Removed invariants can be reasoned by using a sepa-
rate procedure.
Implicit Invariants. The set of pre/postconditions
may impose constraints on a set of common fea-
tures in a model. Unrolling each of them produces
similar-structured formulas and therefore increases
the overall formula size. For example, it is implicit
that each operation call in Figure 1 uses one com-
mon constraint: the number of items contained in a
shopping cart must not be negative. In fact, this con-
straint is an implicit class invariant. When users dis-
cover this constraint via the analysis of synthesised
sequence, users may elevate this constraint to a class
invariant and introduce a ∀ quantifier. Hence, we in-
troduce the following simplification rule:
k
^
j=0
F
i
(o, j) ≡ ∀o : T, s : INT. F
i
(o, s) (7)
Formula 7 implies that if there exists a constraint (F
i
)
on an object (o) over bounded states, then this con-
straint can be reduced to a single quantified one.
Symmetric Relations. Relations between two
classes are modelled as associations in a UML class
diagram. However, many relations are symmetric
and naively unrolling formulas over these relations
doubles the overall formula size. For example, a mar-
riage relationship between two people is symmetric
since marriage(person0, person1) is the same as
marriage(person1, person0). Thus, we can halve
the formula size by unrolling only one of them. We
now provide a simplification rule (Formula 8) for
expressing such symmetric relations over unbounded
states.
k
^
j=0
Rel(o
1
, o
2
, j)
∧
k
^
j=0
Rel(o
2
, o
1
, j)
≡
∀o
1
: T
1
, o
2
: T
2
, s : INT. Rel(o
1
, o
2
, s)
= Rel(o
2
, o
1
, s)
(8)
Formula 8 uses ∀ to quantify a (binary) symmetric
relation Rel
9
. With this rule, we now can unroll one
of the Rel(o1, o2, j) and therefore reduce the overall
formula size.
9
For an n-ary relation, it can be decomposed into multi-
ple binary relations.
MODELSWARD 2020 - 8th International Conference on Model-Driven Engineering and Software Development
254

7 IMPLEMENTATION AND
EVALUATION
We have implemented a prototype that generates syn-
thesis and properties constraints for a given input
model. Currently, this prototype is semi-automatic.
We first generate a smaller template for a given model.
The template includes information such as the num-
ber of the objects and the length of a sequence to be
synthesised. Then, our tool uses a formula reason-
ing engine from MaxUSE for instantiating those tem-
plates to produce the concrete synthesis and property
constraints (Wu, 2017a; Wu, 2017b). By default, our
tool generates SMT2 standard formulas and uses the
Z3 SMT solver for constraint solving (De Moura and
Bjørner, 2008).
In order to evaluate the scalability of our tech-
nique, we collect 4 models from recent literature and
one from the example shown in Figure 1 to form a
benchmark. Since our prototype is semi-automatic,
we first generate a smaller template for each model in
the benchmark and manually verify the correctness of
these formulas. We then scale them into much longer
sequences.
7.1 Evaluation
We evaluate our technique on an Intel(R) Xeon(R)
machine with eight 3.2GHz cores and 16 GB memory.
However, our evaluation only uses one single core.
The evaluation is divided into two phases. First, we
evaluate the synthesis constraints with property con-
straints with respect to pre/post conditions. Second,
we evaluate the effectiveness of our simplification
rules by applying appropriate rules on each model.
We now here to discuss our evaluation results. All
of our generated results can be found at:
http://www.cs.nuim.ie/
∼
haowu/synseq.html
Results. The rows in non-gray colour in Table 1
shows the results of our evaluation on synthesis and
property constraints. The ‘Time’ and ‘Size’ columns
show the time spent (the unit here is second) on syn-
thesising sequences and number of formulas gener-
ated, respectively. In general, our technique is able to
synthesise large sequences quite efficiently. For each
model, our technique can handle a number of objects
and pre/post conditions. The most challenging model
in this benchmark is the Bank model. This is because
this model contains quite a lot of numeric constraints
and this imposes a great challenge to the SMT solver.
To determine how effective our simplification rules
are, we apply suitable simplification rules on each
model. For example, we use full reachability (FR)
property constraint and removing invariants (RI) sim-
plification rule to discover a counter-example (for the
Tra f f icLights model) that a pedestrian light and a car
light are both in a dead state (cannot progress with fur-
ther operation when k ≥ 4). The rows in gray colour
in Table 1 shows the difference after applying suitable
simplification rules. The results here show that by us-
ing simplification rules in Section 6 can effectively re-
duce overall formula size and increases performance
in most of the cases. Interestingly, though the sym-
metric relation rule can halve the formula size, it does
not always increase performance. This phenomenon
is observed when we set k ≥ 250 for Marriage model.
We surmise that when use symmetric relation (SR)
rule it introduces additional quantifiers and this may
cause the solver to spend quite amount of time on in-
stantiating those quantifiers.
Comparison. Comparing to existing approaches
(Soeken et al., 2011b; Przigoda et al., 2015), our tech-
nique can synthesise much larger sequences. Here,
we compare our technique against bit-vector based
approaches (Soeken et al., 2011a; Soeken et al.,
2011b; Przigoda et al., 2015). In general, it is dif-
ficult to compare performance. This is because: (1)
The performance typically depends on specific mod-
els, properties (deadlock, reachability), and the indi-
vidual SMT solver used. (2) It is extremely difficult to
reimplement other’s formulas due to the lack of pub-
licly accessible data (Soeken et al., 2011a; Soeken
et al., 2011b; Przigoda et al., 2015). In order to per-
form a fair performance comparison, we compare our
approach against bit-vector based approaches on the
benchmark but select the bank model as a representa-
tive model here
10
. In general, our comparison results
reveal that the bit-vector based approaches have good
performance only when the size of bit-vectors are rel-
atively small.
To conduct a meaningful experiment, we reim-
plement the bit-vector based approaches presented in
(Soeken et al., 2011b; Przigoda et al., 2015) for the
bank model (Przigoda et al., 2015) and set up three
groups
11
. Each group uses different sized bit-vectors:
8,16 and 32. Hence, each account in three groups has
an upper bound of 255,65535 and 4294967295, re-
spectively. For each group, we then instantiate 3 bank
accounts, constrain the initial and final state within a
sequence. We ask SMT solvers to synthesise a se-
10
Due to the page limit, we use bank model as our repre-
sentative model to explain the comparison results.
11
Though the work in (Przigoda et al., 2015) checks the
concurrent behaviours of a system, the fundamental encod-
ing is the same as the work in (Soeken et al., 2011b).
Verifying OCL Operational Contracts via SMT-based Synthesising
255
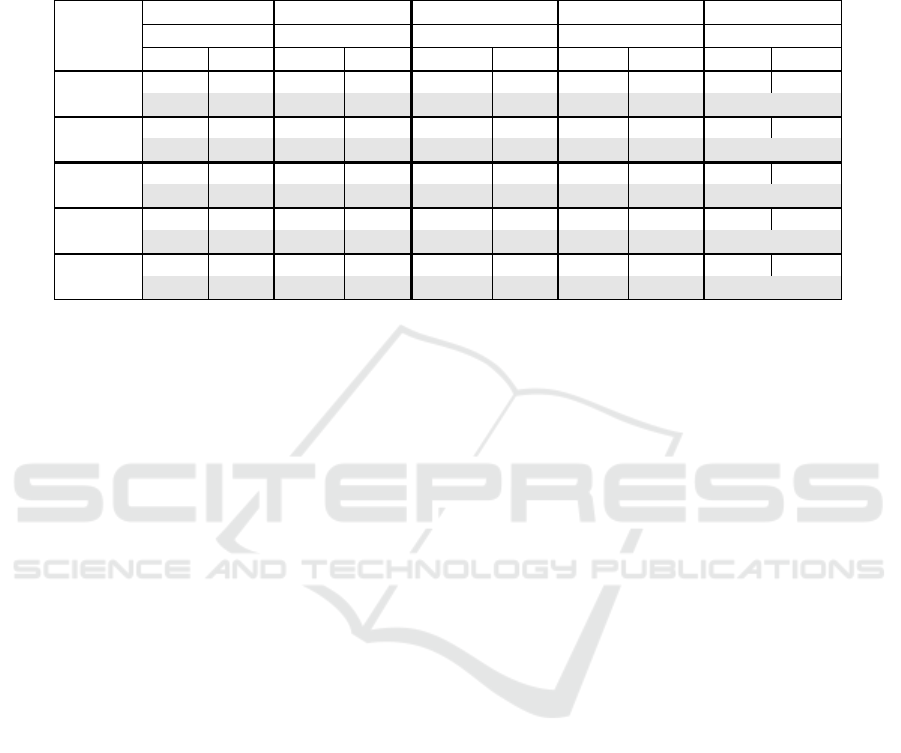
Table 1: The evaluation results of synthesis and property constraints with simplification rules for models collected in the
literature: Company(Gogolla et al., 2007), TrafficLights(Soeken et al., 2011b), Bank(Przigoda et al., 2015) and Marriage
(Gogolla et al., 2017). The time unit here is seconds. The row in gray colour shows the improvements in both performance
and formula size after applying simplification rules. CB, FR, CEnT and PS denotes called-before, full reachability, called
exactly n times and partial sequence properties respectively. RI, II and SR denotes removing invariants, implicit invariants
and symmetric relations simplification rules respectively.
Length
Company TrafficLights Bank Marriage Onlineshop
FR, RI FR, RI CEnT, RI CEnT, SR PS, CB, RI, II
Time Size Time Size Time Size Time Size Time Size
k = 100
0.47 2302 0.91 912 10.83 2499 4.48 7549 0.09 1314
0.24 2201 0.42 810 8.40 1599 2.29 4305 0.09 1013
k = 150
3.56 3450 4.63 1362 18.12 3748 10.30 11575 1.24 1963
3.50 3302 3.46 1210 14.72 2398 7.51 5994 1.12 1509
k = 200
5.50 4603 14.72 1810 80.56 5203 18.39 15288 4.56 2611
4.48 4402 7.22 1597 45.72 3401 8.51 8598 3.22 2247
k = 250
6.57 5752 21.87 2262 154.58 6428 19.53 21840 5.45 3011
5.86 5500 15.61 2010 151.61 3998 20.21 9994 5.70 2509
k = 300
7.71 6901 32.06 2704 167.93 7498 25.83 21849 6.30 3613
7.38 6704 23.70 2408 109.74 4798 26.39 11994 6.21 3008
quence with a length (k) from 10 up to 50 (with an
interval of 10). We use Boolector for the bit-vector
based approaches. Boolector is a specially crafted
SMT solver for bit-level reasoning (Niemetz et al.,
2015). We then use Z3 SMT solver to solve the syn-
thesis constraints generated using our technique.
Table 2 shows the performance comparison results
on the bank model. It can be seen that bit-vector based
encoding works quite well with the width of 8. How-
ever, when the size of each bit-vector increases the
performance significantly decreases. This is because
the solver needs to create a boolean variable for each
bit in a bit-vector (bit-blasting), before it performs a
series of arithmetic operations for each bit. This is
fine for a bit-vector that has a smaller fixed width. In
Table 2, the bit-vector based encoding (with 16 and
32 bit width) can only synthesise a call sequence of
length up to 20. On the other hand, our technique al-
lows much better scaling. This is much more realistic
as in the real world many data structures work with
32 bit long integers. For example, a bank can set up
an account using a 32 bit integer (or even larger) rep-
resenting the amount of money that an account can
hold.
7.2 Discussion
Compared to existing approaches, our evaluation re-
sults show that our synthesis and property constraints
can be solved efficiently at a much larger scale
(Soeken et al., 2011b; Przigoda et al., 2016; Przigoda
et al., 2015). Our simplification rules also effectively
reduce the overall formula size. In comparison to bit-
vector based approaches, the trade off here is among
three aspects: expressiveness, flexibility and perfor-
mance. Therefore, we compare our technique to bit-
vector based approaches in these three aspects. Table
3 shows detailed comparisons in different criterion.
In general, encoding a model along with OCL opera-
tional contracts into quantifier-free bit-vectors should
possess high performance during the SMT solving.
However, this is not always the case. In particu-
lar, when the model is required to be encoded into
larger size bit-vectors or involves complicated arith-
metic computations, the performance decreases sig-
nificantly due to bit-blasting. Our technique provides
a better solution to balance the three aspects by us-
ing the first-order encoding. This allows quantifiers
to be used for class invariants, queries and triggered
system states. This helps to reduce the number of for-
mulas unrolled in each state and provides much more
expressiveness, flexibility and in the meanwhile main-
tains high performance.
Automation. Though our technique is semi-
automatic, we provide a set of python scripts that
is able to process a formula template generated by
MaxUSE and instantiate it with concrete synthesis
and property constraints. The amount of user inter-
vention here is quite little. However, adding extra
constraints for a particular state may require users to
manually insert the formula into a template. We are
now building a tool that is able to automatically insert
the formula at appropriate place in a template.
OCL. Our technique currently supports a range of
OCL language constructs. These include: constraints
on attributes, different operations over collection data
MODELSWARD 2020 - 8th International Conference on Model-Driven Engineering and Software Development
256
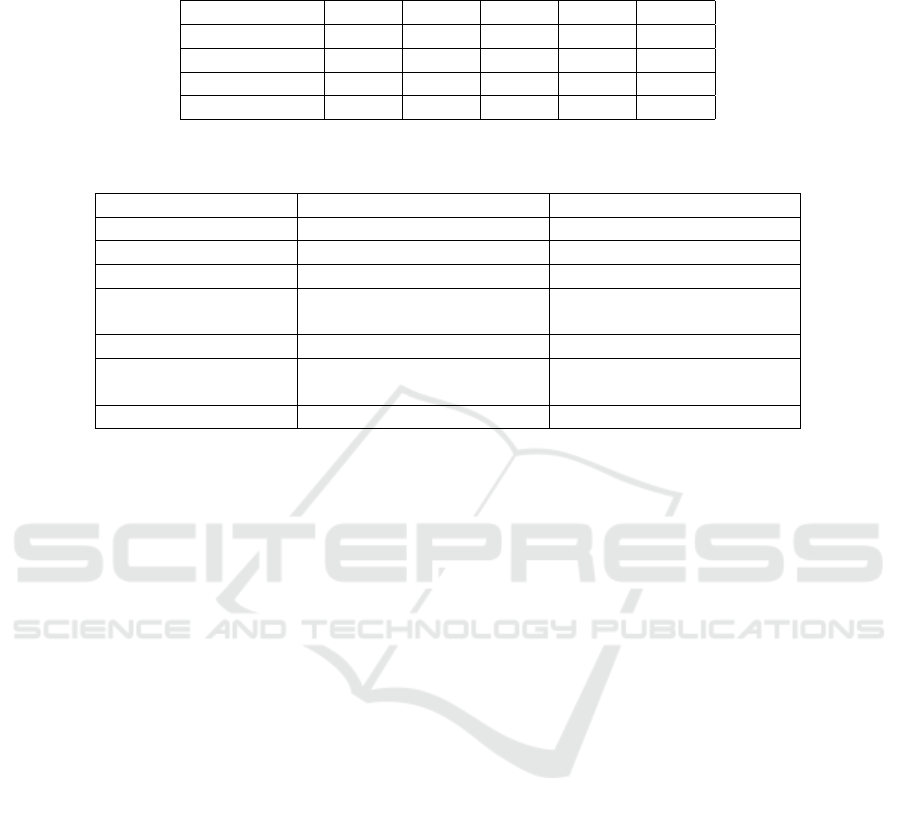
Table 2: The performance comparison between bit-vector based approaches and our technique. The time unit here is seconds
and TO indicates timed out. BV(8), BV(16) and BV(32) indicates each bit vector has a width of 8, 16 and 32 bits respectively.
The timed out setting here is 180 seconds for both Boolector and Z3 SMT solvers.
Approach k = 10 k = 20 k = 30 k = 40 k = 50
BV(8) 0.41 1.22 3.25 4.67 6.32
BV(16) 0.54 10.7 TO TO TO
BV(32) 0.93 37.6 TO TO TO
Our Technique 0.13 0.54 0.62 3.58 5.67
Table 3: The criterion for comparing our technique (first-order encoding) against bit-vector based approaches. E, F and P here
denote three aspects: expressiveness, flexibility and performance.
Criterion Bit-vector First-order
Data Types (E) Bounded Unbounded
Class Invariants (E) Unrolled in each state Quantified
Query (F) No direct support Quantified states.
Property (F) Unrolled with synthesis
constraints.
Separated from synthesis
constraints
Formula Size (P) Compact Reduced
Solving Time (P) Fast on small size
bit-vectors
Fast first-order reasoning
Underlying Solver (P) BV solver SMT Solver
types and quantified class invariants. However, the
models collected in the benchmark (Table 1) do not
cover full OCL features. Hence, there is a gap be-
tween covering full OCL language features and our
technique. Further, OCL is a 4-valued logic language
that includes undefined and invalid values. Currently,
we do not support encodings for undefined and invalid
values. However, we are investigating a new encoding
that allows us to support multi-valued logic.
Our Findings. We have two main findings: (1) Our
synthesis and property constraints possess high ex-
pressiveness and flexibility. This significantly im-
proves possibilities of debugging or analysing differ-
ent sequences by using quantified first-order forms
without regenerating synthesis constraints for each
state. (2) Our simplification rules are effective for re-
ducing and boosting performance. This also shows
users a general template for further expanding or cre-
ating more customised rules.
Limitations. We identify two limitations. (1) Our
property constraints currently works on bounded
states. Hence, when the length of a sequence in-
creases the regeneration of the property constraints is
inevitable. Though it is possible to introduce quanti-
fied forms for the property constraints, rewriting the
property constraints unrolled in each state to first-
order form may require a more sophisticated encoding
for the synthesis constraints. (2) Our simplification
rules in general reduce overall formula size. However,
the introduced quantifiers may lead to quantifier alter-
nations (If the formula is already quantified). This
typically places a great challenge on current SMT
solvers. One of the ways to tackle this is to use a
specialised decision procedure designed for synthesis
problems only (Reynolds et al., 2017).
Threats to Validity. There are two threats to valid-
ity in our evaluation. (1) Our benchmark is formed
from existing approaches covering a great deal of
OCL constructs including: navigation, nested quan-
tified invariants and queries or operations over collec-
tion data types. However, they do not cover all aspects
of OCL constructs such as closure operator. (2) The
comparison results may not be precise enough. This is
because we reimplement bit-vector based approaches
based on interpretations of published articles rather
than the actual concrete formulas due to the lack of
publicly accessible data.
8 RELATED WORK
SMT solving techniques (Przigoda et al., 2015;
Soeken et al., 2011b) and filmstripping (Gogolla
et al., 2014; Hilken and Gogolla, 2016; Gogolla et al.,
2017) are two major approaches for generating (syn-
thesising) call sequences from OCL operational con-
tracts. In general, the two approaches complement
each other and a detailed comparison has been con-
ducted in (Hilken et al., 2014). The filmstripping ap-
Verifying OCL Operational Contracts via SMT-based Synthesising
257

proach translates the source model into so-called film-
strip models. These models essentially are UML class
diagrams annotated with OCL constraints. These con-
straints are frame conditions that specify the changes
to the model. One of the major advantages using film-
strip is that the low level (SAT solver) is not explic-
itly exposed to users. Thus, it does not require users
to have the knowledge at the solver level. However,
the cost here is the substantial manual interaction at
model level. Therefore, the filmstripping approach
is suitable for very dedicated tasks. In comparison,
our technique presented here is more general and it
focuses on increasing expressiveness, flexibility and
maintaining high performance through a novel first-
order encoding.
Constraint programming (CP) is another popular
approach to verifying dynamic aspects of UML mod-
els (Cabot et al., 2009). Typically, CP provides a high-
level programming language so that a particular prob-
lem can be programmed into a constraint satisfaction
problem (CSP) (Cabot et al., 2009; Gonz
´
alez P
´
erez
et al., 2012; Cabot et al., 2014). In (Cabot et al.,
2009), they program the verification tasks into a CSP
that is solved later using constraint solvers. In their
work, they propose a range of different properties
to be checked such as weak and strong satisfaction.
Their work mainly focus on generating proofs rather
than synthesising call sequences. Our work distin-
guishes from theirs by proposing a first-order reason-
ing technique so that we can synthesise call sequences
at large scale via SMT solving.
Alloy as a model finding tool (Jackson, 2002; Tor-
lak and Jackson, 2007), is popularly used in many do-
mains including verifying UML models. However,
the majority of the work uses Alloy as its basis fo-
cuses on verifying/solving structural constraints of a
system (Anastasakis et al., 2007; Shah et al., 2009;
Garis et al., 2011; Kuhlmann and Gogolla, 2012).
For example, Kyriakos et al. maps a range of OCL
constructs to Alloy’s specification (Anastasakis et al.,
2007), and Kuhlmann et, al. integrates kodkod (Al-
loy’s solving engine) into the USE modelling tool and
this enables them to be able to verify and analyse
UML models annotated with different types of OCL
constraints.
Other approaches have also sought to translate
UML and OCL into different types of formalisms.
These include interactive theorem provers such as Is-
abelle and KeY (Ahrendt et al., 2007; Brucker and
Wolff, 2009; Balaban and Maraee, 2013; Dania and
Clavel, 2013; Dania and Clavel, 2016). For example,
Brucker et, al. translate OCL into high-order logic
and prove them using Isabelle (Brucker and Wolff,
2008). Others formalises UML models into PVS
(Kyas et al., 2005). Compare to SAT/SMT solving
(Wu et al., 2013; Wu, 2016), interactive based ap-
proaches allow users to input/define their own theo-
rems or axioms to guide the solver. This could be
particularly helpful if the solvers are stuck and cannot
progress during the prove.
9 CONCLUSION
In this paper, we present a new SMT-based technique
that allows us to synthesise call sequences at a much
larger scale than previously possible. This technique
uses first-order form based synthesis constraints. To
enable property-based synthesis with reduced formula
size, we have designed a set of property constraints
and simplification rules. Our evaluation results show
that in comparison to existing approaches, our tech-
nique provides a much more general solution for syn-
thesising call sequences in terms of scalability, ex-
pressiveness, flexibility and performance. Currently,
we are investigating new algorithms and techniques
so that both alternative quantified synthesis and prop-
erty constraints can be efficiently reasoned.
REFERENCES
Ahrendt, W., Beckert, B., H
¨
ahnle, R., and Schmitt, P. H.
(2007). Key: A formal method for object-oriented
systems. In Formal Methods for Open Object-Based
Distributed Systems, pages 32–43. Springer Berlin
Heidelberg.
Anastasakis, K., Bordbar, B., Georg, G., and Ray, I. (2007).
UML2Alloy: A challenging model transformation. In
ACM/IEEE 10th International Conference on Model
Driven Engineering Languages and Systems, pages
436–450, Nashville, TN. Springer.
Balaban, M. and Maraee, A. (2013). Finite Satisfiability of
UML Class Diagrams with Constrained Class Hierar-
chy. ACM Transcation on Software Engineering and
Methodology, 22(3):24:1–24:42.
Berardi, D., Calvanese, D., and De Giacomo, G. (2005).
Reasoning on UML class diagrams. Artificial Intelli-
gence, 168(1-2):70–118.
Brucker, A. D. and Wolff, B. (2008). HOL-OCL: A for-
mal proof environment for UML/OCL. In 11th Inter-
national Conference on Fundamental Approaches to
Software Engineering, pages 97–100. Springer.
Brucker, A. D. and Wolff, B. (2009). Semantics, calculi,
and analysis for object-oriented specifications. Acta
Informatica, 46(4):255–284.
B
¨
uttner, F., Egea, M., and Cabot, J. (2012). On verify-
ing ATL transformations using ‘off-the-shelf’ SMT
solvers. In 15th International Conference on Model
Driven Engineering Languages and Systems, pages
432–448.
MODELSWARD 2020 - 8th International Conference on Model-Driven Engineering and Software Development
258

Cabot, J., Claris
´
o, R., and Riera, D. (2009). Verifying
UML/OCL operation contracts. In 7th International
Conference on Integrated Formal Methods, pages 40–
55, D
¨
usseldorf, Germany. Springer.
Cabot, J., Claris
´
o, R., and Riera, D. (2014). On the veri-
fication of UML/OCL class diagrams using constraint
programming. Journal of Systems and Software, 93:1–
23.
Dania, C. and Clavel, M. (2013). Ocl2fol+: Coping with
undefinedness. In OCL@MoDELS.
Dania, C. and Clavel, M. (2016). Ocl2msfol: A mapping to
many-sorted first-order logic for efficiently checking
the satisfiability of ocl constraints. In 19th Interna-
tional Conference on Model Driven Engineering Lan-
guages and Systems, pages 65–75. ACM.
De Moura, L. and Bjørner, N. (2008). Z3: an efficient SMT
solver. In 14th International Conference on Tools and
Algorithms for the Construction and Analysis of Sys-
tems, pages 337–340, Budapest, Hungary. Springer.
Garis, A., Cunha, A., and Riesco, D. (2011). Translating Al-
loy Specifications to UML Class Diagrams Annotated
with OCL. In 9th International Conference on Soft-
ware Engineering and Formal Methods, pages 221–
236, Montevideo, Uruguay. Springer.
Gogolla, M., B
¨
uttner, F., and Richters, M. (2007). USE: A
UML-based specification environment for validating
UML and OCL. Science of Computer Programming,
69(1-3):27–34.
Gogolla, M., Hamann, L., Hilken, F., Kuhlmann, M., and
France, R. B. (2014). From application models to
filmstrip models: An approach to automatic validation
of model dynamics. In Modellierung.
Gogolla, M., Hilken, F., Doan, K., and Desai, N. (2017).
Checking UML and OCL model behavior with film-
stripping and classifying terms. In 11th International
Conference on Tests & Proofs, pages 119–128.
Gonz
´
alez P
´
erez, C. A., Buettner, F., Claris
´
o, R., and Cabot,
J. (2012). EMFtoCSP: A tool for the lightweight ver-
ification of EMF models. In Formal Methods in Soft-
ware Engineering: Rigorous and Agile Approaches,
Zurich, Suisse.
Hilken, F. and Gogolla, M. (2016). Verifying linear tempo-
ral logic properties in UML/OCL class diagrams using
filmstripping. In 2016 Euromicro Conference on Dig-
ital System Design, pages 708–713.
Hilken, F., Niemann, P., Gogolla, M., and Wille, R. (2014).
Filmstripping and unrolling: A comparison of verifi-
cation approaches for uml and ocl behavioral models.
In Tests and Proofs, pages 99–116. Springer Interna-
tional Publishing.
Jackson, D. (2002). Alloy: a lightweight object modelling
notation. ACM Transactions on Software Engineering
Methodologies, 11(2):256–290.
Kuhlmann, M. and Gogolla, M. (2012). From uml and ocl to
relational logic and back. In 15th International Con-
ference on Model Driven Engineering Languages and
Systems, pages 415–431. Springer.
Kyas, M., Fecher, H., de Boer, F. S., Jacob, J., Hooman,
J., van der Zwaag, M., Arons, T., and Kugler, H.
(2005). Formalizing UML models and OCL con-
straints in PVS. Electronic Notes in Theoretical Com-
puter Science, 115:39–47.
Niemann, P., Hilken, F., Gogolla, M., and Wille, R. (2015).
Extracting frame conditions from operation contracts.
In 18th International Conference on Model Driven
Engineering Languages and Systems, pages 266–275.
Niemetz, A., Preiner, M., and Biere, A. (2015). Boolec-
tor 2.0 system description. Journal on Satisfiability,
Boolean Modeling and Computation, 9:53–58.
Przigoda, N., Hilken, C., Wille, R., Peleska, J., and Drech-
sler, R. (2015). Checking concurrent behavior in
uml/ocl models. In 18th International Conference on
Model Driven Engineering Languages and Systems
(MODELS), pages 176–185.
Przigoda, N., Soeken, M., Wille, R., and Drechsler,
R. (2016). Verifying the structure and behav-
ior in uml/ocl models using satisfiability solvers.
IET Cyber-Physical Systems: Theory Applications,
1(1):49–59.
Reynolds, A., Kuncak, V., Tinelli, C., Barrett, C., and De-
ters, M. (2017). Refutation-based synthesis in smt.
Formal Methods in System Design.
Shah, S. M. A., Anastasakis, K., and Bordbar, B. (2009).
From UML to alloy and back again. In 6th Interna-
tional Workshop on Model-Driven Engineering, Veri-
fication and Validation, pages 4:1–4:10. ACM.
Soeken, M., Wille, R., and Drechsler, R. (2011a). En-
coding OCL data types for SAT-based verification of
UML/OCL models. In 5th International Conference
on Tests and Proofs, pages 152–170, Zurich, Switzer-
land. Springer.
Soeken, M., Wille, R., and Drechsler, R. (2011b). Verifying
dynamic aspects of uml models. In Design, Automa-
tion Test in Europe, pages 1–6.
Torlak, E. and Jackson, D. (2007). Kodkod: a rela-
tional model finder. In 13th International Confer-
ence on Tools and Algorithms for the Construction
and Analysis of Systems, pages 632–647, Braga, Por-
tugal. Springer.
Wille, R., Soeken, M., and Drechsler, R. (2012). Debug-
ging of inconsistent UML/OCL models. In 2012 De-
sign, Automation Test in Europe Conference Exhibi-
tion, pages 1078–1083.
Wu, H. (2016). Generating metamodel instances satisfying
coverage criteria via SMT solving. In The 4th Interna-
tional Conference on Model-Driven Engineering and
Software Development, pages 40–51.
Wu, H. (2017a). Finding achievable features and constraint
conflicts for inconsistent metamodels. In 13th Euro-
pean Conference on Modelling Foundations and Ap-
plications, pages 179–196. Springer.
Wu, H. (2017b). Maxuse: A tool for finding achievable
constraints and conflicts for inconsistent UML class
diagrams. In Integrated Formal Methods, pages 348–
356. Springer.
Wu, H. (2019). Synthesising call sequences from OCL op-
erational contracts. In The 34th ACM/SIGAPP Sym-
posium on Applied Computing.
Wu, H., Monahan, R., and Power, J. F. (2013). Exploit-
ing attributed type graphs to generate metamodel in-
stances using an SMT solver. In 7th International
Symposium on Theoretical Aspects of Software Engi-
neering, Birmingham, UK.
Verifying OCL Operational Contracts via SMT-based Synthesising
259
