
Recovering Raindrop Removal Images under Heavy Rain
Kosuke Matsumoto, Fumihiko Sakaue and Jun Sato
Nagoya Institute of Technology, Japan
{matsumoto@cv., sakaue@, junsato@}nitech.ac.jp
Keywords:
Raindrop Removal, Heavy Rain, GAN, B-spline.
Abstract:
In this paper, we propose a new method for removing raindrops in images under heavy rain. When we drive in
heavy rain, the raindrops attached to the windshield form a film and our visibility degrades drastically. In such
situations, the existing raindrop removal methods cannot recover clear images, since these methods assume
that the background scene is visible through the gap between the raindrops, which does not happen anymore in
heavy rain. Thus, we in this paper propose a new method for recovering raindrop removal images under heavy
rain from sequential images by using conditional GAN. The results of our experiments on real images and
synthetic images show that the proposed method outperforms the state-of-the-art raindrop removal method.
1 INTRODUCTION
When driving in heavy rain, the risk of an accident
goes up since a large amount of raindrops adhere
to the windshield and hinder visibility. In recent
years, the realization of autonomous vehicles is ex-
pected, but even in the autonomous vehicles that use
in-vehicle cameras, keeping visibility in the rain is a
big problem, as with human drivers.
Thus, in recent years, some methods for removing
raindrops from in-vehicle camera images have been
proposed. However, these methods assume that the
amount of raindrops attached to the windshield is rel-
atively small hence the background scene can be ob-
served through the gaps between the raindrops. Thus,
in the case of heavy rain, when raindrops spread like
a film over the entire windshield, these existing meth-
ods cannot generate raindrop removal images appro-
priately.
Therefore, in this paper,we propose a new method
for generating raindrop removal images properly as
shown in Fig. 1 (b) even when raindrops adhere to the
entire glass surface as shown in Fig. 1 (a).
In our method, the raindrops are not considered
as occluding objects but are considered as transparent
objects that refract incident light in various directions
and distort the observed images. Our method is based
on end-to-end learning, where the input is a set of se-
quential images distorted by heavy rain and the output
is a clear image with no distortion. We use a condi-
tional GAN framework for training a generator effi-
ciently. By using the property of sequential images
(a) image under heavy rain (b) result of our method
Figure 1: Input image observed under heavy rain and rain-
drop removal image obtained from our method.
under heavy rain, where the background scene does
not change drastically while the non-uniform rain-
drops on the windshield randomly change the light
paths to the viewpoint of the camera, our network can
recover a clear undistorted image of the background
scene from a set of sequential images distorted by
heavy rain.
For training our network, we need pairs of rain-
drop and undistorted images. However, under actual
heavy rain, it is very difficult to obtain correspond-
ing images with and without raindrops. Thus, we in
this research synthesize training dataset of sequential
images captured under heavy rain, and train our net-
work by using the synthetic heavy rain dataset. We
show that our network trained on the synthetic heavy
rain dataset outperforms the state-of-the-art raindrop
removal method proposed by Qian (Qian et al., 2018)
in our real image experiments.
128
Matsumoto, K., Sakaue, F. and Sato, J.
Recovering Raindrop Removal Images under Heavy Rain.
DOI: 10.5220/0009325601280136
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
128-136
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 RELATED WORK
There are two major causes of poor visibility in rainy
weather. The first one is rain streaks that block light
passing through 3D space, and the second one is rain-
drops attached to the windshield that refract light and
distort images.
For removing rain streaks in images, many authors
proposed image dehazing methods based on rain char-
acteristics (Garg and Nayar, 2004; N. and N., 2008;
Chen and Hsu, 2013; Santhaseelan and Asari, 2014),
sparse coding (Luo et al., 2015) and deep neural net-
works (Fu et al., 2017; Li et al., 2017; Yang et al.,
2017). However, these methods cannot recover im-
ages which are distorted by raindrops on the wind-
shield.
For removing raindrops attached on windows,
multiple cameras were often used to obtain the scene
information that is hidden by raindrops and invisible
at a certain viewpoint (Yamashita et al., 2005; Mat-
sui et al., 2014). The sequential images were also
used for obtaining the scene information hidden by
raindrops at a certain time instant (Yamashita et al.,
2009; Nomoto et al., 2011; You et al., 2016). More
recently, the deep learning technique is used for re-
covering raindrop removal images from a single cam-
era view (Qian et al., 2018).
Although these raindrop removal methods work
efficiently under light rain, they no longer work prop-
erly under heavy rain. This is because these methods
assume that the background scene can be observed
through the gaps between the raindrops, that is no
longer the case in heavy rain.
Thus, we in this paper consider the raindrops not
as occluding objects but as refractive media that dis-
tort the observed images, and propose a method for
recovering distorted images under heavy rain.
3 RAINDROP REMOVAL USING
GENERATIVE ADVERSARIAL
NETWORK
In the heavy rain, the entire image is covered with
raindrops, and the background scene cannot be ob-
served through the gaps between the raindrops. Thus,
in this research, we recover undistorted background
scene by using the entire image which is distorted by
unknown non-uniform water film.
We assume that the 3D shape of the non-uniform
water film changes over time, and we can observe
a set of sequential images in which the background
scene is distorted by the changing non-uniform wa-
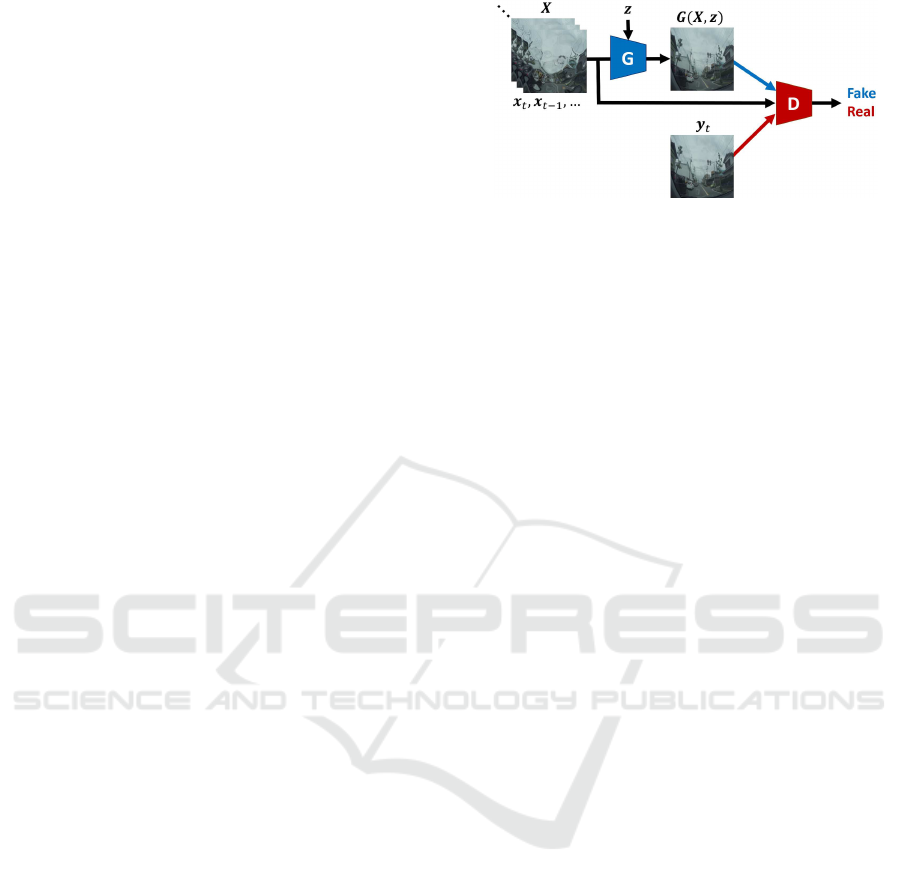
Figure 2: Generative adversarial network (GAN) for gen-
erating raindrop removal images. Generator G generates
a raindrop removal image ˆy
t
from a set of sequential dis-
tortion images X and noise z. Discriminator D learns to
discriminate a false pair ( ˆy
t
, X) and a true pair (y
t
, X), and
generator G is trained so that it minimizes correct answer of
discriminator.
ter film. We use such distorted sequential images for
recovering the undistorted back ground scene image.
Although the image distortion is dynamic and non-
uniform, we think the distorted images include the
background scene information, and hence the undis-
torted backgroundscene image can be recoveredfrom
the distorted sequential images.
For recovering undistorted scene images from the
distorted sequential images, we use conditional GAN
(Isola et al., 2017). The network structure of our con-
ditional GAN is shown in Fig. 2. The generator G
is a 16-layer convolution-deconvolution network (U-
Net) (Ronneberger et al., 2015) and the discriminator
D is a 5-layer convolution network.
The input X of the generator is a set of distorted
sequential images up to the current time t as follows:
X = {x
t
, x
t−1
, ·· · , x
t−T +1
} (1)
where, T is the number of time instants in the set of
sequential images, X. The generator G generates an
undistorted image ˆy
t
at time t from the set of distorted
sequential images X and a random noise vector z as
follows:
ˆy
t
= G(X, z) (2)
The ground truth of the undistorted image is denoted
as y
t
. Unlike the standard conditional GAN, our gen-
erator G generates a single undistorted image G(X, z)
from multiple images X.
The discriminator D is trained so that a ground
truth pair {X, y
t
} is determined to be true and a fake
pair {X, G(X, z)} is determined to be false. The net-
work is trained, so that the discriminator maximizes
the rate of correct judgments and the generator min-
imizes it. Thus, the training of our conditional GAN
can be described as follows:
G
∗
= argmin
G
max
D
L
cGAN
(G, D) + λL
L1
(G) (3)
Recovering Raindrop Removal Images under Heavy Rain
129
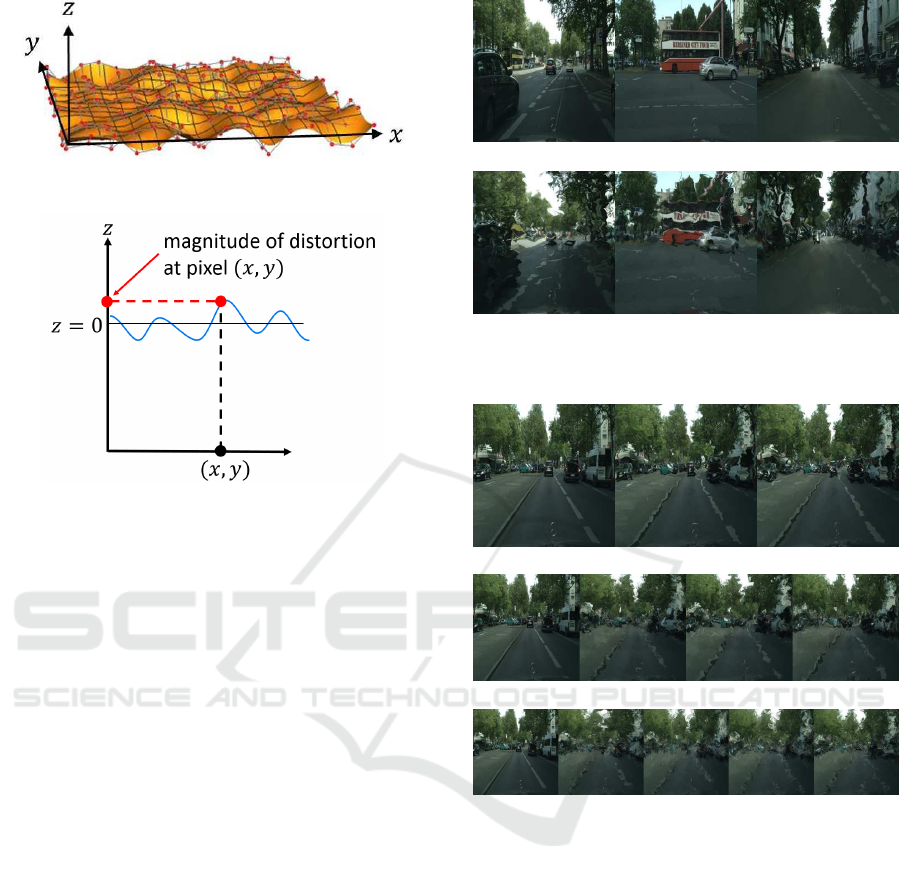
Figure 3: B-spline surface. Red points show control points
of B-spline surface.
Figure 4: Representation of distortion by using a B-spline
surface. The magnitude of distortion at pixel (x, y) is repre-
sented by the z coordinate of the B-spline surface at (x, y).
where, L
cGAN
is the following adversarial loss:
L
cGAN
(G, D) = E
X,y
t
∼p
data
(X,y
t
)
[logD(X, y
t
)]
+E
X∼p
data
(X),z∼p
z
(z)
[log(1− D(X, G(X, z)))] (4)
and L
L1
is an L
1
loss as follows:
L
L1
(G) = E
X,y
t
∼p
data
(X,y
t
),z∼p
z
(z)
ky
t
− G(X, z)k
1
(5)
As training progresses, generator G will generate
images that make it difficult for the discriminator D to
determine authenticity. In other words, a trained gen-
erator can generate raindrop removal images that are
natural to humans from a series of distorted sequential
images.
4 DATASET
Since the accuracy of deep learning depends on the
dataset, it is important to collect many data for train-
ing. However, it is very difficult to obtain various
scene data with and without various raindrops, in par-
ticular under heavy rain. Thus, in this research, we
synthesize images that are distorted by various heavy
rains adhere on a windshield and build a dataset for
training.
(a) Original images
(b) Raindrop images
Figure 5: Example of raindrop images synthesized by B-
spline surfaces.
(a) T = 2, small distortion
(b) T = 3, medium distortion
(c) T = 4, large distortion
Figure 6: Example images in our dataset. (a) shows an orig-
inal image and two sequential raindrop images in the case
of T = 2. (b) shows those in the case of T = 3 and (c) shows
those in the case of T = 4 respectively. The magnitude of
distortion is small in (a), and those in (b) and (c) are medium
and large respectively.
4.1 Representation of Raindrop
Distortions
Since we consider situations in which heavy rain gen-
erate non-uniform water film on a windshield, the dis-
tortion caused by the non-uniform water film is rep-
resented by using a B-spline surface. By using the B-
spline surface, the surface shape can be controlled by
a limited number of control points efficiently. Fig. 3
shows an example of B-spline surface which is gen-
erated from the control points shown in red. The B-
spline surface S(u, v)is defined by using K×K control
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
130

points P
ij
(i = 1, ·· · , K; j = 1, ··· K) as follows:
S(u, v) =
K
∑
i=1
K
∑
j=1
N
P
i
(u)N
P
j
(v)P
ij
(6)
where, u and v denote parameters in horizontal and
vertical axes, and P is the degree of B-spline.
N
P
i
(u) and N
P
j
(v) are called blending functions
and represent the influence of the control points. In
the case of a B-spline surface, B-spline basis func-
tion is used as the blending function, which is de-
fined by the position of the knot sequence x
i
(i =
1, ·· · , K + P+ 1), as follows:
N
1
i
(u) =
(
1 (x
i
≤ u ≤ x
i+1
)
0 (otherwise)
(7)
N
K
i
(u) =
u− x
i
x
i+k
− x
i
N
K−1
i
(u)
+
x
i+k+1
− u
x
i+k+1
− x
i+1
N
K−1
i+1
(u) (8)
In this paper, image distortion due to raindrop wa-
ter surface is represented by the B-spline surface.
4.2 Raindrop Image Synthesis
In case of heavy rain, the entire image is heavily dis-
torted by raindrops. In order to generate a distorted
image from an undistorted image, image transforma-
tion is performed by using B-spline surfaces. In our
B-spline surfaces, x axis represents the horizontal di-
rection of the image, and the y axis represents the ver-
tical direction of the image respectively. The z axis
of the B-spline surface represents the displacement
of the image point (x, y) caused by the raindrops as
shown in Fig. 4. Since we have displacement in x
and y axes, the displacement is represented by two
independent B-spline surfaces, S
x
(x, y) and S
y
(x, y).
Thus, the point coordinates (x, y) of the original im-
age is transformed into (x
′
, y
′
) in the distorted image
as follows:
x
′
= x+ x
p
(x, y)
y
′
= y+ y
p
(x, y)
(9)
where, x
p
(x, y) and y
p
(x, y) denote the displacement
of a point (x, y) in x and y axes, and these are rep-
resented by the z coordinate of S
x
(x, y) and S
y
(x, y)
respectively.
By varying the control points of the B-spline sur-
face, it is possible to represent distortions caused by
various raindrops. Thus, we control the z coordinates
of the K × K control points of S
x
and S
y
. More specif-
ically, the image distortion is controlled by a vec-
tor p = [z
x
11
, ·· · , z
x
KK
, z
y
11
, ·· · , z
y
KK
]
⊤
, which consists of
the z coordinates of the K × K control points of S
x
and
S
y
. We call it a water surface parameter.
Some example images generated by using the B-
spline surface are shown in Fig. 5.
4.3 Sequential Raindrop Image Dataset
and Training
By using the method described in section 4.2, we gen-
erated a dataset of sequential raindrop images. The
sequential images in Cityscapes dataset (Cordts et al.,
2016) were distorted by changing the water surface
parameter p randomly. The number of time instants
T in sequential images was set to 2, 3 and 4 for eval-
uating the relationship between the number of time
instants T and the accuracy of recovered raindrop re-
moval images.
Furthermore, in order to evaluate the relationship
between the magnitude of distortion and the accuracy
of undistorted image recovery, the dataset was gen-
erated changing the magnitude of image distortion in
three patterns of small, medium and large. Thus, the
sequential raindrop image dataset was generated with
3 different numbers of time instants and 3 different
patterns of distortion, and a total of 3× 3 = 9 datasets
were created. Each dataset consists of 325 training
sequences and 50 test sequences. Some examples of
nine datasets are shown in Fig. 6.
The network explained in section 3 was trained
by using the sequential raindrop image datasets. We
trained the network with 1000 epoch. Then, the
trained generator was used for generating undistorted
images from a set of distorted sequential images.
5 EXPERIMENTS
5.1 Synthetic Image Experiments
We next show the experimental results obtained from
the proposed method. We first show results from syn-
thetic image experiments.
Fig. 7 shows results under small image distortions,
where (a) shows ground truth raindrop removal im-
ages and (b) shows input raindrop images distorted
by heavy rain. Fig. 7 (c), (d) and (e) show raindrop
removal images obtained from the proposed method
in the case of T = 2, T = 3 and T = 4 respectively.
It can be confirmed that the input images in (b) have
distortions whereas the recovered images in (c), (d)
and (e) have no distortion.
Fig. 8 shows results under medium distortions. As
shown in Fig. 8 (b), we have relatively large distor-
Recovering Raindrop Removal Images under Heavy Rain
131
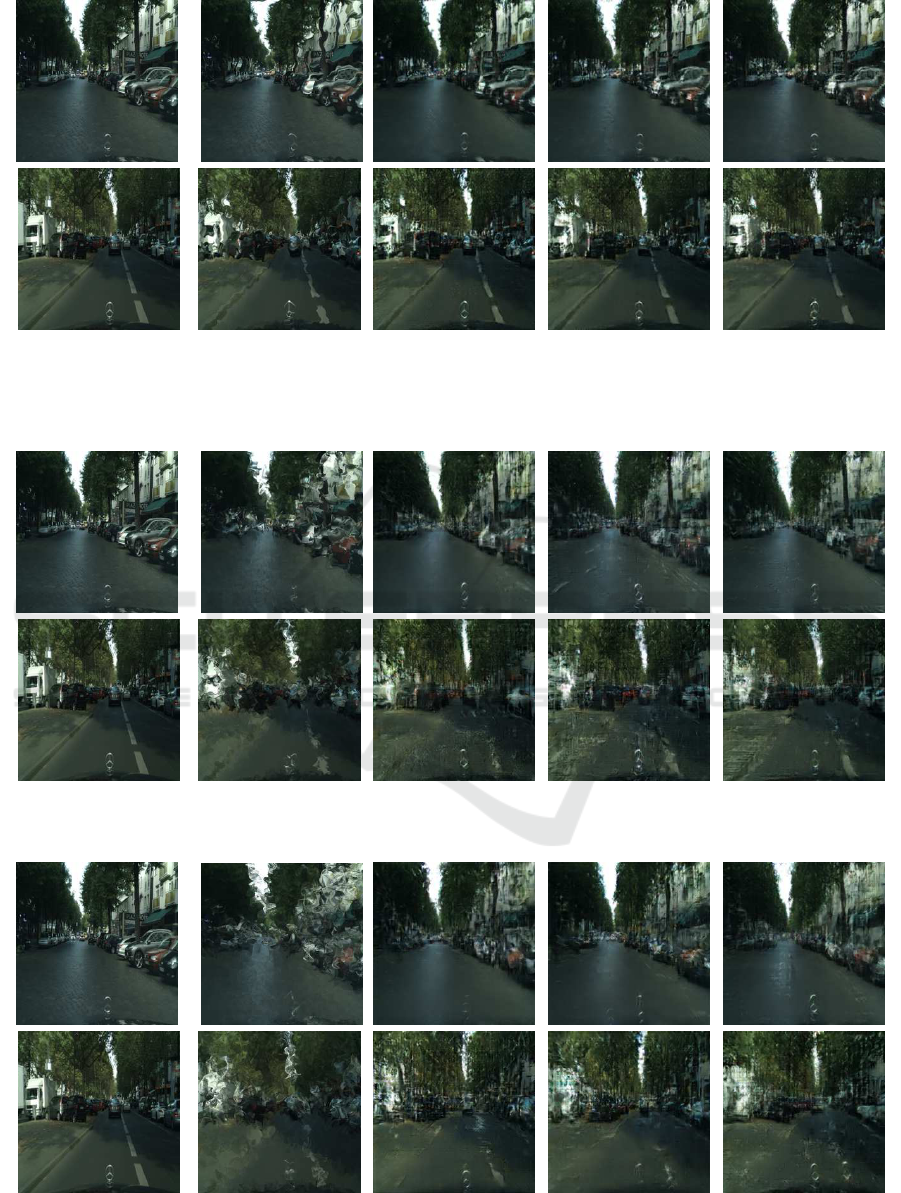
(a) ground truth (b) input image (c) T = 2 (d) T = 3 (e) T = 4
Figure 7: Results under small image distortions. (a) shows ground truth images, (b) shows test input images which are
distorted by raindrops, (c), (d) and (e) show raindrop removal images obtained from our method in the case of T = 2, T = 3
and T = 4 respectively.
(a) ground truth (b) input image (c) T = 2 (d) T = 3 (e) T = 4
Figure 8: Results under medium image distortions. See the caption of Fig. 7 for detail explanations.
(a) ground truth (b) input image (c) T = 2 (d) T = 3 (e) T = 4
Figure 9: Results under large image distortions. See the caption of Fig. 7 for detail explanations.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
132
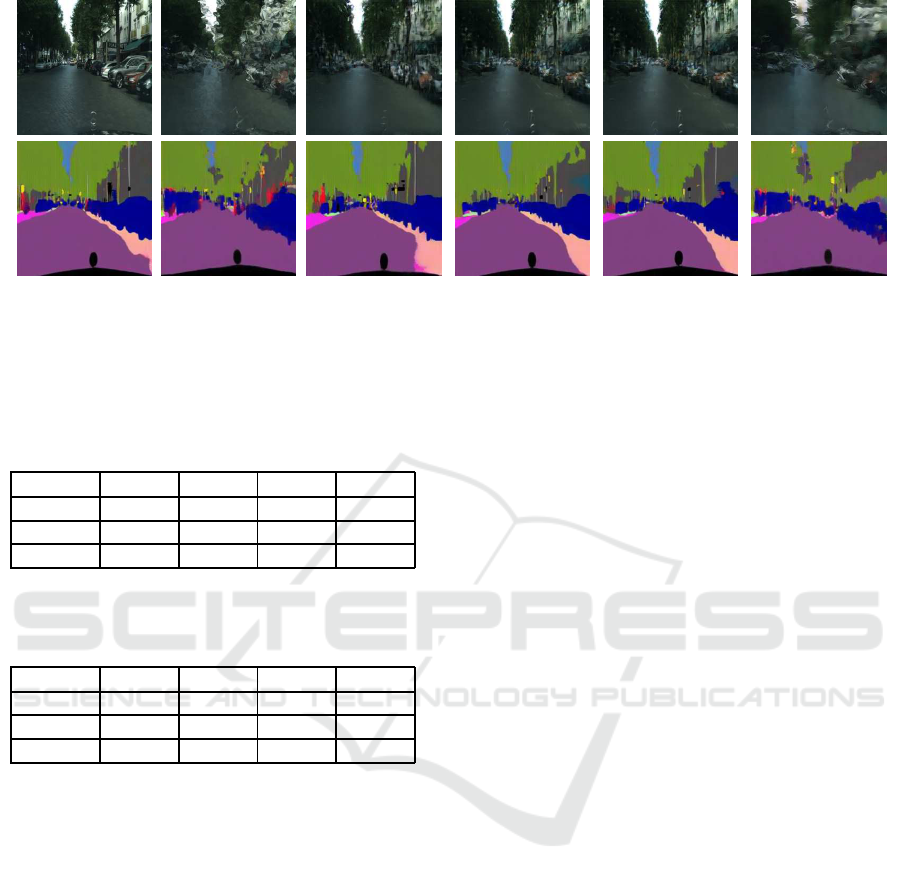
(a) ground truth (b) input image (c) T = 2 (d) T = 3 (e) T = 4 (f) A
2
Net
Figure 10: Comparison with the existing method. Columns (a) to (e) are the same as before, and column (f) is the result of the
conventional method A
2
Net. The first row shows the generated images, and the second row shows the results of segmentation
obtained from the standard segmentation network.
Table 1: Segmentation error of the proposed method (T = 2,
T = 3, T = 4) and the existing method (A
2
Net) under small,
medium and large image distortions.
T = 2 T = 3 T = 4 A
2
Net
small 0.0803 0.0776 0.0748 0.1286
medium 0.1456 0.1407 0.1293 0.1773
large 0.1851 0.1508 0.1456 0.2266
Table 2: LPIPS of the proposed method (T = 2, T = 3, T =
4) and the existing method (A
2
Net) under small, medium
and large image distortions.
T = 2 T = 3 T = 4 A
2
Net
small 0.0322 0.0291 0.0268 0.1990
medium 0.1181 0.1145 0.0927 0.1992
large 0.1179 0.1118 0.1294 0.2312
tions in input raindrop images. Nonetheless, the pro-
posed method reduced the image distortion drastically
as shown in Fig. 8 (c), (d) and (e). Also, we find that
less distorted images were generated as we increase
the number of time instants T in the image sequence.
Fig. 9 shows results under large distortions. As
shown in Fig. 9 (b), it is almost impossible to rec-
ognize original vehicles and buildings in the input
images. Nonetheless, the proposed method recov-
ered fairly good road scene images with vehicles and
buildings. Again, image quality increases as we in-
crease the number of time instants T.
5.2 Comparison with Conventional
Methods
We next compare our method with the existing state-
of-the-art raindrop removal method. In this exper-
iment, we compared our method with A
2
Net (Qian
et al., 2018) proposed by Qian et al. Their method
also uses deep neural network for removing raindrops
in images. However, their method assumes that the
raindrops in images are not so many, and the back-
ground scene is occluded only partially in images.
We tested these two methods under heavy rain situ-
ations. The first row of Fig. 10 shows the raindrop
removal images generated from the proposed method
and A
2
Net under heavy rain situations. As shown in
these images, A
2
Net cannot recover raindrop removal
images properly, while the proposed method provides
us fairly good results.
For comparing the accuracy of raindrop removal
images numerically, we computed LPIPS (Zhang
et al., 2018), which can measure semantic similar-
ity of two images. Unlike the traditional error met-
ric, such as RMSE and SSIM, it has been confirmed
by many authors that LPIPS provides us image sim-
ilarity that matches the human sense. We computed
LPIPS between the ground truth images and raindrop
removal images generated by our method and A
2
Net.
The results are shown in Table 2. As shown in this
table, LPIPS of our method decreases as we increase
the number of time instants used in our method. We
can also find that our method provides us much better
raindrop removal images than A
2
Net.
For evaluating the visibility of objects in the re-
covered images, we also evaluated our method by per-
forming the semantic segmentation on the recovered
images using a pretrained semantic segmentation net-
work. The semantic segmentation network used in
this evaluation is pix2pix (Isola et al., 2017). For
comparing the segmentation accuracy numerically,
the segmentation error was computed by normalizing
the total number of wrongly segmented pixels by the
number of total pixels N
p
in an image multiplied with
Recovering Raindrop Removal Images under Heavy Rain
133

(a) input images
(b) results from the proposed method
(c) results from A
2
Net
Figure 11: Results from real image experiment. (a) shows images observed under heavy rain. (b) and (c) show raindrop
removal images obtained from images in (a) by using the proposed method and A
2
Net respectively. The visibility in (b) is
better than that in (a) and (c). For example, the white lane markers and the road guardrails are heavily distorted in (a) and (c),
but they look more accurate in (b).
the number of images N
i
as follows:
error =
1
N
i
· N
p
N
i
∑
i=1
N
p
∑
j=1
wrong(i, j) (10)
wrong(i, j) =
0 :
pixel j of image i is
segmented correctly
1 : others
(11)
The second row in Fig. 10 show the results of se-
mantic segmentation performed on raindrop removal
images recovered from our method and A
2
Net under
large image distortions. As shown in Fig. 10 (f), the
segmentation result of A
2
Net is very different from
that of the ground truth in (a). However, that of the
proposed method is very close to the ground truth as
shown in Fig. 10 (c), (d) and (e). Moreover, it can
be seen that the quality of the raindrop removal image
improves as we increase the number of time instants
used in the proposed method.
The improvement of accuracy in the proposed
method can be seen more clear in Table 1, which
shows the segmentation error defined in Eq. (10). As
we can see in this table, the proposed method outper-
forms A
2
Net in all cases of small, medium and large
distortions. We can also find that the accuracy im-
proves as we increase the number of time instants in
our method.
From these results, we find that the proposed
method is very efficient for recovering images which
are distorted by heavy rain.
5.3 Real Image Experiments
Up to now, we tested our method by using synthetic
heavy rain images. For evaluating the efficiency of
our method, we next apply our method to real heavy
rain images.
Fig. 11 (a) shows input images of various road
scenes observed under heavy rain. As we can see
in these images, the road scenes are heavily distorted
due to the rain water film, and driving with these im-
ages is very difficult. Fig. 11 (b) shows raindrop re-
moval images obtained from the proposed method,
and Fig. 11 (c) shows those obtained from A
2
Net.
From these results, we find that both methods can-
not remove image distortions perfectly, but the pro-
posed method provides us better views of the road
scene than A
2
Net.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
134

Since the ground truth undistorted images of these
scenes are not available, we cannot evaluate the accu-
racy of these generated images numerically. However,
we can still find that the visibility of the scene in (b) is
better than that in (a) and (c). For example, the white
lane markers and the road guardrails are heavily dis-
torted in (a) and (c), but they look more accurate in
(b).
Although, our method outperforms the existing
state-of-the-art method, we also find that our method
is not perfect, and we need more improvements. In
particular, the heavy rain model used to generate the
training dataset needs to be improved. A more ac-
curate heavy rain model would lead to more accurate
raindrop removal.
6 CONCLUSIONS
In this paper, we proposed a new method for remov-
ing image distortion caused by raindrops under heavy
rain.
In heavy rain, raindrops form a non-uniform film
on the windshield, and the visibility for a driver de-
grades drastically. The existing raindrop removal
methods cannot recover clear images in such situ-
ations, since these methods assume that the back-
ground scene is visible through the gap between the
raindrops, which does not happen anymore in heavy
rain. Thus, we in this paper proposed a new method
for recovering raindrops removal images from the se-
ries of distorted images. The results of our exper-
iments show that the proposed method outperforms
the state-of-the-art raindrop removal method in heavy
rain situations.
The proposed method is promising, but challenges
remain. In our proposed method, image degradation
due to raindrops is considered. However, in actual
heavy rains, image degradation due to rain streaks
also exists, so it is desirable to expand to a method
that improves both of these degradations.
Furthermore, it is also important to use real heavy
rain images to train the network for improving the ac-
curacy. Since the ground truth undistorted images are
not available under heavy rain, we need to consider
unsupervised leaning in the raindrop removal frame-
work.
REFERENCES
Chen, Y. and Hsu, C. (2013). A generalized low-rank ap-
pearance model for spatio-temporally correlated rain
streaks. In Proc. of International Conference on Com-
puter Vision, pages 1968–1975.
Cordts, M., Omran, M., Ramos, S., Rehfeld, T., Enzweiler,
M., Benenson, R., Franke, U., Roth, S., and Schiele,
B. (2016). The cityscapes dataset for semantic urban
scene understanding. In Proc. of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Fu, X., Huang, J., Ding, X., Liao, Y., and Paisley, J. (2017).
Clearing the skies: A deep network architecture for
single-image rain removal. IEEE Transactions on Im-
age Processing, 26(6):2944–2956.
Garg, K. and Nayar, S. (2004). Detection and removal of
rain from videos. In Proc. Conference on Computer
Vision and Pattern Recognition (CVPR), volume 1.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1125–1134.
Li, Y., Tan, R., Guo, X., Lu, J., and Brown, M. (2017).
Single image rain streak separation using layer priors.
IEEE Transactions on Image Processing.
Luo, Y., Xu, Y., and Ji, H. (2015). Removing rain from
a single image via discriminative sparse coding. In
Proc. of International Conference on Computer Vision
(ICCV), pages 3397–3405.
Matsui, T., Sakaue, F., and Sato, J. (2014). Raindrop re-
moval by using camera array system. In IEEE 17th In-
ternational Conference on Intelligent Transportation
Systems (ITSC), pages 2249–2250. IEEE.
N., B. and N., L. (2008). Using the shape characteristics of
rain to identify and remove rain from video. In Proc.
of Joint International Workshops on Statistical Tech-
niques in Pattern Recognition and Structural and Syn-
tactic Pattern Recognition, volume LNCS5342, pages
pp 451–458.
Nomoto, K., Sakaue, F., and Sato, J. (2011). Raindrop com-
plement based on epipolar geometry and spatiotem-
poral patches. In Proc. of International Conference
on Computer Vision Theory and Applications, pages
175–180.
Qian, R., Tan, R. T., Yang, W., Su, J., and Liu, J. (2018).
Attentive generative adversarial network for raindrop
removal from a single image. In The IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Santhaseelan, V. and Asari, V. (2014). Utilizing local phase
information to remove rain from video. International
Journal of Computer Vision, pages 1–19.
Yamashita, A., Fukuchi, I., and Kaneko, T. (2009). Noises
removal from image sequences acquired with moving
camera by estimating camera motion from spatiotem-
poral information. In Proc. of International Confer-
ence on Intelligent Robots and Systems, pages 3794–
3801.
Recovering Raindrop Removal Images under Heavy Rain
135

Yamashita, A., Tanaka, Y., and Kaneko, T. (2005). Re-
moval of adherent waterdrops from images acquired
with stereo camera. In Proc. of International Confer-
ence on Intelligent Robots and Systems, pages 400–
405.
Yang, W., Tan, R., Feng, J., Liu, J., Guo, Z., and Yan, S.
(2017). Deep joint rain detection and removal from
a single image. In Proc. of the IEEE Conference on
Computer Vision and Pattern Recognition.
You, S., Tan, R., Kawakami, R., Mukaigawa, Y., and
Ikeuchi, K. (2016). Adherent raindrop model-
ing, detectionand removal in video. IEEE transac-
tions on pattern analysis and machine intelligence,
38(9):1721–1733.
Zhang, R., Isola, P., Efros, A. A., Shechtman, E., and Wang,
O. (2018). The unreasonable effectiveness of deep
features as a perceptual metric. In Proc. of the IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
136
