
Object Tracking using CSRT Tracker and RCNN
Khurshedjon Farkhodov
1
, Suk-Hwan Lee
2
and Ki-Ryong Kwon
1
1
Dept. of IT Convergence and Applications Engineering, Pukyong National University, South Korea
2
Dept. of Information Security, Tongmyong University, South Korea
Keywords: Object Tracking, Object Detection, CSRT, Faster RCNN, CSR-DCF, CNN, Opencv, Deep Learning, DNN
Module.
Abstract: Nowadays, Object tracking is one of the trendy and under investigation topic of Computer Vision that
challenges with several issues that should be considered while creating tracking systems, such as, visual
appearance, occlusions, camera motion, and so on. In several tracking algorithms Convolutional Neural
Network (CNN) has been applied to take advantage of its powerfulness in feature extraction that convolutional
layers can characterize the object from different perspectives and treat tracking process from misclassification.
To overcome these problems, we integrated the Region based CNN (Faster RCNN) pre-trained object
detection model that the OpenCV based CSRT (Channel and Spatial Reliability Tracking) tracker has a high
chance to identifying objects features, classes and locations as well. Basically, CSRT tracker is C++
implementation of the CSR-DCF (Channel and Spatial Reliability of Discriminative Correlation Filter)
tracking algorithm in OpenCV library. Experimental results demonstrated that CSRT tracker presents better
tracking outcomes with integration of object detection model, rather than using tracking algorithm or filter
itself.
1 INTRODUCTION
The main goal in this proposed tracking method is to
focus on exact object to track, furthermore because of
the real-time object tracking environment there are
some parameters should be considered, such as
camera movement, distance between object and
camera, and so on. As an object detector Faster R-
CNN have been used after comparing all object
detection methods, for instance Viola-Jones
algorithm: the first efficient face detector (P. Viola
and M. Jones, 2001), much more efficient detection
technique: Histograms of Oriented Gradients (N.
Dalal and B. Triggs, 2005), and from 2012 the deep
learning methods, which is called “Convolutional
Neural Networks” became the gold standard for
image classification after Kriszhevsky's CNN's
performance during ImageNet (A. Krizhevsky, et al.,
2012), While these results are impressive, image
classification is far simpler than the complexity and
diversity of true human visual understanding. A better
approach, R-CNN has been proposed (R. Girshick, et
al., 2013) after CNN realized. R-CNN creates
bounding boxes, or region proposals, using a process
called Selective Search. Later, where further merge of
R-CNN and Fast R-CNN into a single network by
sharing their convolutional features using the recently
popular terminology of neural networks with
“attention” mechanisms, the RPN component tells the
unified network where to look (R. Girshick, 2016). In
this paper, we propose an algorithm that to apply
OpenCV-based CSRT tracker into person detection
and tracking, which we combined with Faster R-CNN
based object detector with the support of OpenCV’s
DNN module and obtained trained object detector
model. With the great afford of deep learning-based
object detection technique that we can easily avoid
target misclassification and lost. Results of proposed
tracking method has gained remarkable outcome, and
tested in a different dataset with single and overlap-
ping images, also the tracking system experimented
with video and real-time sequence and got much
better performance that rather than using tracking
filter without any additional supporter like detector.
This article consists of following sections: our
suggested tracking system structure explained in
system overview section comes with related work.
In
section 3, the detailed results will be presented which
obtained during the experiments and we also
compared visual value with the conventional methods
performance, conclusion and reference follows as
well.
Farkhodov, K., Lee, S. and Kwon, K.
Object Tracking using CSRT Tracker and RCNN.
DOI: 10.5220/0009183802090212
In Proceedings of the 13th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2020) - Volume 2: BIOIMAGING, pages 209-212
ISBN: 978-989-758-398-8; ISSN: 2184-4305
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
209
2 RELATED WORKS
2.1 Overview of the Object Detection
Task
Object detection has applications in many areas of
computer vision, including image retrieval and video
surveillance. Variations in position, color, lighting
conditions, size, etc., greatly affect the performance
of the model. Object detection and tracking processes
should be fine-tuned, that depending on what kind of
problem is going to be solved. This is usually
determined by the characteristics of the target. For
instance, detecting vehicles require different
parameters tuning than detecting pedestrians, animals,
or faces, and so on. This feature-based technique
exploits a notable differentiation character of the
objects that taken from 2D pixel information in an
image (Gonzalez, R. C., and Woods, R. E., 2017).
While using feature points of 2D images, such as
color, intensity, background information it is easy
way to identify object from frames if it will not
change the appearance, position, and size as well.
2.2 Faster RCNN Object Detection
Architecture
Faster RCNN is becoming one of the most used and
popular an object detection architecture presented by
R. Girshick, Sh. Ren, K. He and J. Sun in 2015 that
uses Convolutional Neural Network like other
famous detectors, such as YOLO (You Look Only
Once), SSD (Single Shot Detector) and so on. In
general, Faster RCNN composed from three main
part at all that can be managed building object
detection model process. They are: a) convolution
layers; b) region proposal network; c) classes and
bounding boxes prediction (Faster RCNN, n.d.):
2.3 Training Dataset
We have used our own dataset (600 images) for
training (400) and testing (200) process, which has
been collected throughout internet sources, such as
blogs, posts, and so on. The difference between our
dataset apart from other datasets is that our dataset
images taken by drone camera and environment.
Training process speed and time depends on what
kind of CPU and GPU system we have, if our OS has
last version of GPU hardware system that means we
can get training results faster than using CPU system.
If your computer has no supporting hardware
platform or latest GPU system, we recommend you
do not use your computer for other high memory or
performance required processes while training, that
can affect to obtain training outcomes as well as it
could lead your training process to be time consuming.
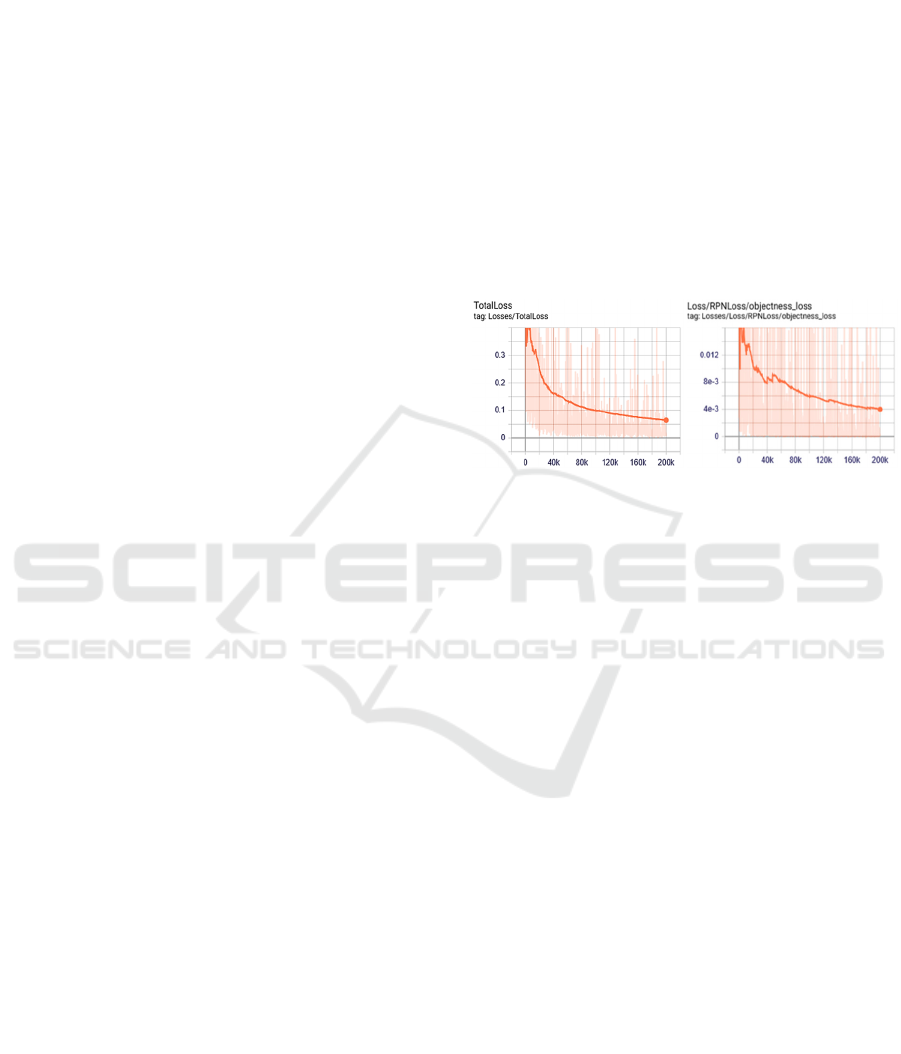
Training classifier should train until the loss is
consistently below 0.05 or so that the law starts to
plateau out. A total loss graph estimates that while
learning training dataset images it can loss or
misidentify objects by their features, shapes and other
parameters in one average graph performance. The
total loss of training process performance together
with objectiveness loss, which can show us the
objectiveness score (4e-3≈0.004) of the dataset’s
images, to indicate if this box contains an object or
not while training process is given in Figure 1 below:
Figure 1: Performance of the total losses along with
objectiveness loss.
2.4 Proposed Object Tracking Method
The basis of our tracking method taken from the
Discriminative Correlation Filter with Channel and
Spatial Reliability (CSR-DCF) (A. Lukezic, et al.,
2018) tracking algorithm. Moreover, this algorithm has
been implemented in a C++ and integrated into Open
CV library as a DNN (Deep Neural Networks) module
(OpenCV dnn module, n.d.). We proposed a tracking
system that integration of Faster RCNN object
detection as an object detector and OpenCV_CSRT_
tracker as a tracking algorithm for tracking method.
Implemented object tracking process contains two
parts: first is already explained above, training object
classifier and generating object detection model from
training outcome file. From coming frame algorithm
takes blobs and gives it to object detection model to
predict location of object and classify as an object
class. Output predictions of the detection passes to
tracking algorithm to track predicted box of object
class and so on, any other circumstances of object
prediction changes tracker will invoke the object
classifier and restarts process from the beginning.
3 EXPERIMENTAL RESULTS
After finishing 200K times training our dataset we got
BIOIMAGING 2020 - 7th International Conference on Bioimaging
210

our object classifier model and we have tested our
object detection (classifier) model work by applying
images from different open source resources that
accomplishment of our detector demonstrated perfect
results, such as shown in Figure 2. We can see the
remarkable results of object detection model from
different sources; however, the object classifier is not
detecting all objects in frame at once in a section (c)
and accuracy rate is under 100%. While tracking we
may face thousands of positions, location, shape as
well that means it requires more quantity of images
on dataset with different position and environment
object located images to get perfect results.
Nevertheless, with 600 labeled images dataset gave
unusual result after training by Faster RCNN object
classifier model.
a) b) c) d)
Figure 2: Object detection results of the pre-trained Faster
RCNN object classifier: (a) image from internet sources
taken by drone camera; (b, c) picture taken from drone
video sequence; (d) image from VOT2018 dataset.
We have tested our tracking method with different
open source datasets and got good results and
compered with conventional tracker itself. The
experiments show that CSR-DCF tracker algorithm
cannot re-establish object once it gone from current
frame or tracks object not properly and if the shape or
appearance of the tracking object changes in a
noticeable drape tracker can’t track object properly
and consequently it will lose a target. We have tested
this situation on video sequence taken by drone, here
is some result of tested video shown in Figure 3 below:
0 485 981 1242
1611 1696 1854 2106
Figure 3: Qualitative results of conventional (CSR-DCF,
blue) and proposed (FRCNN_CSRT, green) trackers (0,
485, 981,… - frames).
Initially, conventional tracking method
performance was good, it tracked a target properly,
but after some movement of target frame by frame
and changing a foreground/background color of
frame the tracker could not predict properly (given in
1611, 1696, 1854 frames) a new location of target and
position of the maximum in correlation between
backgrounds and image patch features extraction on
position and weight by the channel reliability scores.
Our tracker performance precision (accuracy) has
been calculated by the ability of our tracking model
that to identify only the relevant objects. It is the
percentage of correct positive predictions. Precision
calculation equation given below:
=
+
=
Here, TP is a True Positive – a correct detection,
detection with intersection over union (IOU ≥
threshold); FP is a False Positive – a wrong detection,
detection with IOU < threshold.
Furthermore, a proposed tracking method has
been tested with several well-known open source
datasets, like OTB (Object Tracking Benchmark),
VOT (Visual Object Tracking), and others. However,
we have compared results in Table 1 with some open
source datasets which conventional method has been
tested and posted as a final approach performance in
several internet blogs. We can see the comparison
results of conventional and proposed tracking
methods in Table 1, where has been tested with three
different open source datasets that the main difference
between two methods is deep learning-based
approach and real time frames per second as well. As
we can see below in the first column of TABLE 1
results of CVRP2013 dataset while conventional
method presents 80 percent accuracy, proposed
method gained 89 percent tracking accuracy
respectively. Furthermore, outcomes of the tested
technique performance can be seen in next two
column with some of systems feature.
Table 1: Comparsion Results.
Tracker
Precision-
CVPR2013
Precision-
OTB100
Precision
-OTB50
Deep
Learning
(Yes/No)
Real
Time
CSR-DCF 0.8 0.733 N Y(13)
Proposed 0.89 0.829 0.81 Y Y(30)
Object Tracking using CSRT Tracker and RCNN
211

4 CONCLUSIONS
In conclusion, we can say that our proposed tracking
method has gained good performance as well as
comparable results. Our trained object classifier
model has showed excellent work by training 200K
times only 400 images for training and 200 images for
testing. In this method we have integrated deep
learning-based object classifier model with CSRT
tracker OpenCV implementation version of CSR-
DCF algorithm with the support of OpenCV DNN
module. We have compared performance of CSR-
DCF tracking algorithm with our integrated tracking
method. Comparison results showed a much better
performance in proposed tracking method that in
tracking process an object classifier gives exact
location of the target in frame with the benefit of pre-
trained object classifier. In the future work we will try
to create CNN tracker that can be work without pre-
trained model.
ACKNOWLEDGEMENTS
This research was supported by the MSIT (Ministry
of Science and ICT), Korea, under the ICT
Consilience Creative program (IITP-2020-2016-0-
00318) supervised by the IITP (Institute for
Information & communications Technology Planning
& Evaluation), and Basic Science Research Program
through the National Research Foundation of Korea
(NRF) funded by the Ministry of Science, ICT &
Future Planning (2016R1D1A3B03931003, No.
2017R1A2B2012456), and Ministry of Trade,
Industry and Energy for its financial support of the
project titled “the establishment of advanced marine
industry open laboratory and development of realistic
convergence content”
REFERENCES
P. Viola and M. Jones, July 13, 2001. “Robust Real-time
Object Detection,” Second international workshop on
statistical and computational theories of vision –
modeling, learning, computing, and sampling,
Vancouver, Canada, IJCV 2001 See pp 1-3.
N. Dalal and B. Triggs, Jun, 2005. “Histograms of Oriented
Gradients for Human Detection,” International
Conference on Computer Vision & Pattern Recognition
(CVPR '05), San Diego, United States. pp.886-893.
A. Krizhevsky, I. Sutskever, Geoffrey E. Hinton, 2012.
“ImageNet Classification with Deep Convolutional
Neural Networks” - Part of: Advances in Neural
Information Processing Systems 25 (NIPS),
DOI: 10.1145/3065386.
R. Girshick, J. Donahue, T. Darrell, and J. Malik,
November 2013. “Rich feature hierarchies for accurate
object detection and semantic segmentation”,
DOI: 10.1109/CVPR.2014.81.
R. Girshick, 6 Jan. 2016. “Faster R-CNN: Towards Real-
Time Object Detection with Region Proposal
Networks,” - Computer Vision and Pattern Recognition
(cs.CV), arXiv:1506.01497 [cs.CV].
Gonzalez, R.C., and Woods, R.E., 2017: Digital Image
Processing. Pearson, 4
th
edition.
Faster RCNN, https://towardsdatascience.com/faster-rcnn-
object-detection- f865e5ed7fc4
A. Lukezic, T. Vojır, L. C. Zajc, J. Matas, and M. Kristan,
July 2018. “Discriminative Correlation Filter Tracker
with Channel and Spatial Reliability,” International
Journal of Computer Vision: Volume 126, Issue 7, pp
671–688.
OpenCV dnn module, cv::dnn::Net Class Reference,
https://docs.opencv.org/master/db/d30/classcv_1_1dnn
_1_1Net.html
BIOIMAGING 2020 - 7th International Conference on Bioimaging
212
