
Evaluation of 3D Vision Systems for Detection of Small Objects in
Agricultural Environments
Justin Le Louedec
1
, Bo Li
2
and Grzegorz Cielniak
1 a
1
Lincoln Centre for Autonomous Systems, University of Lincoln, U.K.
2
University of West England, U.K.
Keywords:
Machine Vision for Agriculture, Machine Learning, 3D Sensing, 3D Vision.
Abstract:
3D information provides unique information about shape, localisation and relations between objects, not found
in standard 2D images. This information would be very beneficial in a large number of applications in agri-
culture such as fruit picking, yield monitoring, forecasting and phenotyping. In this paper, we conducted a
study on the application of modern 3D sensing technology together with the state-of-the-art machine learning
algorithms for segmentation and detection of strawberries growing in real farms. We evaluate the performance
of two state-of-the-art 3D sensing technologies and showcase the differences between 2D and 3D networks
trained on the images and point clouds of strawberry plants and fruit. Our study highlights limitations of the
current 3D vision systems for detection of small objects in outdoor applications and sets out foundations for
future work on 3D perception for challenging outdoor applications such as agriculture.
1 INTRODUCTION
Thanks to recent advances in 3D sensing technology
and rapidly growing data-driven algorithms, the 3D
vision has attracted considerable attention in recent
years. Compared to 2D images, 3D information pro-
vides additional depth cues critical for estimating pre-
cise location and assessing shape properties of var-
ious objects in the environment. So far, the main
focus in the 3D vision community has been centred
around benchmark datasets captured in controlled en-
vironments with large and rigid objects and fairly sta-
ble lighting conditions (e.g. (Dai et al., 2017; Armeni
et al., 2017)). There is, however, a strong case for
deploying such systems in real-life scenarios and cur-
rently it is not clear how well the current state of the
art in 3D vision translates into the challenging situ-
ations posed by applications such as in agriculture.
As part of our research project, we propose a study
on the application of modern 3D sensing technology
together with the state-of-the-art machine learning al-
gorithms for segmentation and detection of strawber-
ries growing in real farms. The precise information
about strawberry fruit location and shape description
have a range of applications such as yield monitor-
ing and forecasting, phenotyping or robotic picking.
a
https://orcid.org/0000-0002-6299-8465
The challenges posed by such a scenario include vari-
able lighting conditions, reflections, occlusions, non-
rigid structure of the strawberry plants and relatively
small size of the fruit. Since, the current 3D sens-
ing technology has not been deployed widely in such
scenarios and most of the modern machine learning
algorithms were designed and trained specifically for
large and rigid objects, our study aims to assess the
usefulness of the sensing and learning methodology
for the proposed application.
In particular, our paper provides the following
contributions:
• assessment of two competing 3D sensing tech-
nologies (i.e. projected stereo IR pattern and
Time-of-Flight sensors) for the problem of detec-
tion of small objects (i.e. fruit) in outdoor envi-
ronments;
• assessment of the current state of the art in 3D ma-
chine learning and of the required modifications
enabling their use for the proposed application;
• comparison of the accuracy for 2D image-based
and full 3D approaches;
• validation of the sensing and learning pipeline on
data collected from real strawberry farms.
This paper is organised as follows: we start with a
brief overview of the related work in 3D sensing and
682
Louedec, J., Li, B. and Cielniak, G.
Evaluation of 3D Vision Systems for Detection of Small Objects in Agricultural Environments.
DOI: 10.5220/0009182806820689
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
682-689
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

vision followed by the description of our methodol-
ogy (Sec. 3) and its experimental evaluation in Sec-
tion 4. The paper is concluded in Section 5.
2 BACKGROUND
2.1 3D Vision in Agriculture
In agricultural applications, 3D information can pro-
vide important object characteristics such as crop
size, shape or location. The most common approach
to recognise such objects is based on a combination
of 2D images for crop segmentation and detection
and 3D information for augmenting the shape and
location information. For example, (Lehnert et al.,
2018; Lehnert et al., 2017) describe a perception sys-
tem for harvesting sweet peppers. After scanning an
reconstructing the scene using a robotic arm, they
use colour information in the point cloud to detect
the pepper. They then use the 3D projection of the
segmented peduncle to estimate a pose and the opti-
mal grasping/cutting point. (Barnea et al., 2016) also
present a perception system for pepper harvesting but
use a colour agnostic method to detect fruits using
a combined colour and depth information (i.e. pro-
vided by RGBD cameras). By using highlights in the
image, and 3D plane-reflective symmetries, their sys-
tem is able to detect pepper fruit based on shape, in
heavily occluded situations. (Yoshida et al., 2018)
use RGBD cameras and a two resolution voxelisa-
tion of the 3D space to detect tomatoes peduncles and
the optimal cutting point for harvesting. They first
identify regions corresponding to tomatoes whilst us-
ing the dense voxelisation on the selected regions and
to establish the optimal cutting points on the pedun-
cle. The DeepFruit system (Bargoti and Underwood,
2016) uses Deep Learning networks for the detection
of fruits in images taken from the orchards. The sys-
tem achieves good detection accuracy but by only re-
gressing bounding boxes over instances, it does not
consider spatial information and therefore is prone to
missed detections when the fruits overlap.
2.2 Deep Learning for 3D Information
3D information is represented by so-called point
clouds - a collection of unconnected and unordered
points in 3D space which originate from sensors such
as 3D laser range finders or Time-of-Flight cameras
(i.e. RGBD cameras) and can be augmented by ad-
ditional information such as colour, reflectivity, etc.
The core of machine learning methods using deep net-
works is applied to standard images and therefore is
based on 2D convolutions. This can be realised ef-
fectively in 2D but poses problems in 3D. First of all,
the convolution operation requires a discretisation of
space into so-called voxels, which is typically associ-
ated with some loss of information and large memory
requirements. Secondly, 3D convolution operations
are computationally expensive which renders them
unusable in most of the real-life scenarios. Therefore,
there is a big interest in developing methods which
can cope with these challenges. Point cloud pro-
cessing using Deep Learning has been revolutionised
by PointNet (Qi et al., 2017a) and subsequently by
its improved variant PointNet++ (Qi et al., 2017b).
The PointNet architecture can be directly applied to
a point cloud, through a prior segmentation/grouping
of points in space using clustering algorithms such as
K-Nearest Neighbours (KNN) or ball query. Convo-
lutions are not applied to the organised representation
of space, but rather to the features extracted from the
clustered regions, which can be performed efficiently.
PointNet++ is using a multi-scale approach for par-
titioning point clouds and relies on two main layers
used for encoding and decoding information. The first
layer (Set Abstraction (SA)) extracts features from
points by considering their neighbourhood defined by
a radius. The second layer (Feature Propagation (FP))
interpolates the features and learns their decoding into
the dimension of the previous SA layer, up until the
same size as the input point cloud. For the classifica-
tion task, the latent representation of the point cloud
features after the succession of SA layers is used and
passed through a multi-layer perceptron to predict the
classification of individual points. For segmentation
and other task requiring features associated for each
point of the point cloud, each SA layer is associated
with an FP layer in charge of decoding the resulting
features up to the input size. A multi-layer perceptron
is then used to predict per point class.
The basic PointNet architecture has been used
to develop further improvements. For example,
PointSIFT (Jiang et al., 2018) uses SIFT-like fea-
tures extracted from the immediate neighbourhood of
a point in 8 directions. On the other hand, PointCNN
(Li et al., 2018) is applying a convolution-like opera-
tor on points grouped and transformed based on pre-
defined properties, ordering points and transforming
their features into a latent and canonical space, fol-
lowed by a standard convolution operation. However,
most of the described improvements, whilst increas-
ing the network’s discriminatory abilities, suffer from
higher computational demands and do not scale well
to real-time applications in realistic scenarios.
Evaluation of 3D Vision Systems for Detection of Small Objects in Agricultural Environments
683

2.3 3D Datasets
The majority of the existing 3D machine learning al-
gorithms were validated on datasets acquired in in-
door environments. The examples of such datasets in-
clude ScanNet (Dai et al., 2017) with scans obtained
using surface reconstruction and crowd-sourced la-
belling for annotation. Another example includes
Stanford 2D-3D-Semantics Dataset(Armeni et al.,
2017) which was created with an RGBD camera. The
S3DIS offers a very complete scene description, ad-
ditional colour information, depth, 2D segmentation,
meshes and 3D segmentation with extracted normals.
There is a very limited amount of publicly available
3D datasets in outdoor spaces. Notable examples in-
clude semantic3D.net (Hackel et al., 2017) which is a
very large scale dataset (4 billion points per scene)
of various outdoor locations. Another example in-
cludes the KITTI (Geiger et al., 2012) dataset, cap-
tured aboard a driving car in various streets, providing
depth and colour information with annotated bound-
ing boxes and instance segmentation. All the above-
mentioned datasets feature large, rigid objects which
are not typical for agricultural environments.
3 METHODOLOGY
3.1 3D Sensing
3D sensing is based on capturing the depth or distance
from the camera to each point in the scene. Capturing
devices for outdoor use can be divided into three main
categories: stereo cameras, Time-of-Flight (ToF) de-
vices and Lidar range finders. Stereo sensors are
based on capturing two images from two image sen-
sors apart from each other and matching their features
to create a depth map based on epipolar lines between
the two sensors. In the case of wrongly matched
points or a lack of similarity, surfaces reconstructed in
this way, are often distorted or flat with blended edges
and objects. This is especially evident with very small
objects. Alternative sensing solutions use light wave-
lengths outside of the visible spectrum (e.g. infra-
red) which are less prone to changing lighting condi-
tions and more robust matching points. Examples of
commercial stereo cameras used in research are ZED
cameras and Intel RealSense (Georg Halmetschlager-
Funek and Vincze, 2018). Time-of-Flight devices
are based on light beams which are being projected
into the scene and reflected back to the sensor. The
depth is estimated from the time taken for the light to
come back. This technology results in more precise
depth measurements, but more prone to noise caused
by reflective objects. The Microsoft Kinect One (i.e.
v2) (Georg Halmetschlager-Funek and Vincze, 2018)
and the Pico Zense (Noraky and Sze, 2018) are a good
example of recent innovations in this technology. Li-
dar is a particular example where the beam of light is
replaced by a laser pulsed at the scene. We do not con-
sider Lidar technology in our work, however, since its
intrinsic properties and resolution are not suited for
the detection of small objects in occluded scenarios
such as strawberries. (Kazmi et al., 2014) offers a
comprehensive study of both sensors applied in dif-
ferent situations.
In this paper, we compare stereo and Time-of-
Flight sensing technologies based on their perfor-
mance in sensing of strawberries in their natural
growing conditions. The two selected cameras were
the Intel Realsense D435 (IR stereo) and the Pico
Zense (ToF). The detailed experimental comparison
of these two technologies on 3D data of strawberries
collected from their natural growing environment is
presented in Section 4.3.
3.2 3D Vision
In our study, we are interested in the feasibility of
modern 3D sensing and machine learning for a prob-
lem of detecting strawberries in their natural environ-
ment. To this end, we select a reliable, robust and
popular (see recent applications (Wang et al., 2017;
Pham et al., 2019; Yang et al., 2019; Wang et al.,
2019)) deep learning architecture PointNet++ (Qi
et al., 2017b). The PointNet++ provides segmenta-
tion results, i.e. per point classification which, if suc-
cessful, would enable instance detection of individual
strawberries. In this work, however, we assess both
sensing technology on segmentation problem only.
3.2.1 Data Pre-processing
Before the 3D data can be used by the network, it
needs to be pre-processed so that the point clouds pro-
vided by both types of sensors are of similar char-
acteristics. The point clouds generated by the sen-
sors are already augmented with registered colour in-
formation (RGB). The sensors generate point clouds
of different density and number: ∼920K points for
the stereo camera and ∼230K points for the ToF de-
vice. Since the sensors are placed in a similar distance
to the strawberry plants (i.e.∼60cm) the point clouds
can be downsampled to match the spatial resolution of
around 3 mm, which is a limiting factor constrained
by the depth resolution of both sensors. This results
in point clouds of ∼25K points which are still too
large for the PointNet architecture and therefore we
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
684
partition them into smaller subsets following a proce-
dure employed in (Qi et al., 2017b). The procedure
is using a sliding box over the point cloud using K-
Nearest Neighbors (KNN) algorithm to guarantee the
same size input (8000 points) and allowing us to train
the algorithms using mini-batches. During the predic-
tion phase, we use a maximum vote strategy for points
belonging to multiple blocks.
3.2.2 PointNet++
The original implementation of PointNet++ requires
modifications to make it suitable for the scale and res-
olution of our problem. PointNet++ offers two ap-
proaches for segmentation: the multi-scale approach
with one-hot encoding for the classification and a sin-
gle scale of grouping with an increased number of
layers and complexity of the feature space. The ini-
tial experimentation on a subset of our data iden-
tified minimal differences in accuracy provided by
these two methods. The second one, however, re-
quires significantly lower execution times and mem-
ory consumption and therefore it was selected for fur-
ther study.
Table 1: Configuration of an encoder used in our Point-
Net++ implementation.
Layer Type #points radius mlps
SA 4096 0.1 [16, 16, 32]
SA 2048 0.1 [32,32,32]
SA 1024 0.1 [32,32,64]
SA 256 0.2 [64,64,128]
SA 64 0.4 [128,128,256]
SA 16 0.8 [256,256,512]
Considering the size of our inputs and the size
of strawberries, we augmented the number of layers
for the decoding part of the network and adding their
counterpart in the decoder. This provides several ben-
efits. Firstly, the point cloud is subdivided progres-
sively into broader versions, with fine-scale features
learnt at the start of the training and global features
learnt towards the end, which compensates for the
lack of an intra-layer multi-scale component. Sec-
ondly, we also adapted the radius for the ball-query
for points which can be adjusted for the selected den-
sity/resolution of points. This second modification is
directly linked to the network’s output and loss func-
tion used. In our implementation, we decided to pre-
dict the class of each point (fruit/background) rather
than using specific class (ripe or unripe fruits and
background). This enabled a better convergence of
the learning process and a stronger emphasis on the
shape features rather than colour. Following nota-
tion introduced in (Qi et al., 2017b), our implemen-
tation features a topology of the encoder and decoder
as summarised in Table 1 and 2, which summarise the
number of points per layer (#points), radius for the
ball-query (radius), feature length (features) and con-
figuration of the multi-layer perceptron (mlps).
Table 2: Configuration of a decoder used in our PointNet++
implementation.
Layer Type features
FP 256,256
FP 256,256
FP 256,128
FP 128,128,128
FP 128,128,64
FP 128,128,64
MLP [64,128]
MLP [128,2]
3.2.3 2D vs 3D Segmentation
To evaluate the usefulness of the 3D information for
segmentation of small objects, we also select a stan-
dard 2D image-based architecture for our compar-
isons. The Convolutional Neural Networks (CNN)s
have proven to be very effective for the object/scene
segmentation tasks although lacking depth informa-
tion. For this purpose, we select a state-of-the-art
popular network architecture called SegNet (Badri-
narayanan et al., 2015), which is very similar to Point-
Net++. SegNet is a feed-forward network using, sim-
ilarly to PointNet++, the auto-encoder principle, en-
coding the feature space down to a specific size (e.g.
512) before decoding it back to the original size of
the input image. For each pixel, we can either pre-
dict a score for each class (strawberry/background)
followed by a softmax function to get the predicted
class, or predict a probability for each class. Each of
the convolutions is followed by a normalisation and
each convolution block by a max-pooling operation.
The decoder uses a max-unpool layer as upsampling
step and transposed convolutions.
4 EXPERIMENTS
4.1 Data Collection
To support the main goal of our application, which
is applying a modern 3D vision system for the detec-
tion and localisation of strawberry fruit, we collected
a dataset from the real environment. To that end, we
have deployed our data acquisition system at a mini
Evaluation of 3D Vision Systems for Detection of Small Objects in Agricultural Environments
685

Figure 1: The strawberry farm, with a robot roaming in the
tabletop rows collecting data (left). The sensor set-up used
for data collection (right).
version of a real strawberry farm, located at Rise-
holme campus of the University of Lincoln. The farm
features two polytunnels of 6 tabletop rows, 24 meter
long with an industrial variety of strawberries (ever-
bearer Driscolls Amesti) as depicted in Fig. 1. The
data capture setup featuring the Realsense and Pico
Zense sensors was mounted on an agricultural robot
Thorvald (Grimstad and From, 2017). The robot au-
tonomously navigated the polytunnel rows, stopping
every 20 cm to collect a snapshot from both views
(see Figure 1). The capturing session took place in
October 2019 and resulted in colour images and point
clouds representing different growth stage of plants
and fruit. The datasets were then manually anno-
tated to indicate location of strawberry fruits result-
ing in 139 labelled point clouds with around 1900 in-
stances of ripe strawberries for ToF data and 64 point
clouds for around 1000 instances for stereo data (see
Table 3).
Table 3: The summary of datasets collected.
sensor stereo ToF
# point clouds 64 139
resolution 1280x720 1280x720
range 20cm-65m 20cm-70cm
# instances ∼ 1000 ∼1900
% strawberry points ∼6% ∼ 6%
4.2 Evaluation Methodology
To evaluate our trained models, we use standard se-
mantic segmentation metrics such as Accuracy and
mean Intersection over Union (mean IoU) and also
Kappa-Cohen (Cohen, 1960) which is particularly
useful when unbalanced number of class instances is
used - in our case, background represents the majority
of points when compared to strawberries.
The Accuracy is the most used metrics for major-
ity of machine learning systems and measures how ac-
curate the prediction is compared to the ground truth,
without taking in consideration the balance of classes
and positives/negatives:
Acc =
T P +TN
P + N
. (1)
Mean IoU is the overlap of the output predicted by
the algorithm with the ground truth and averaged for
every class and samples:
IoU =
T P
(T P + FP + FN)
. (2)
Kappa-Cohen coefficient is particularly useful for un-
balanced data, where one class is more represented
than the others. This measure provides a better as-
sessment of the real discriminatory power of the clas-
sifier and takes observed and expected accuracies into
account:
K =
(Acc
obs
− Acc
exp
)
1 − Acc
exp
. (3)
The Observed Accuracy is the number of instances
correctly classified through point cloud, and the Ex-
pected Accuracy is what any random classifier should
be expected to achieve over the point cloud.
We also use precision-recall curves to evaluate the
performance of the trained classifiers as in (Evering-
ham et al., 2010). Precision represents a ratio of
T P
T P+FP
whilst recall is a ratio of
T P
T P+FN
. The preci-
sion and recall values are computed over a range of
confidence score thresholds of the classifier.
4.3 Results
4.3.1 Quality of Acquisition
We compare the data acquired using Intel Realsense
D435 and Pico Zense cameras which both pro-
vide RGBD information. We do not use the post-
processing filters offered by the Realsense device, as
they were proven to be not reliable outdoors with sen-
sitive light and exposition settings. The only built-in
enhancement enabled is the spatial filter which is also
used in the ToF sensor.
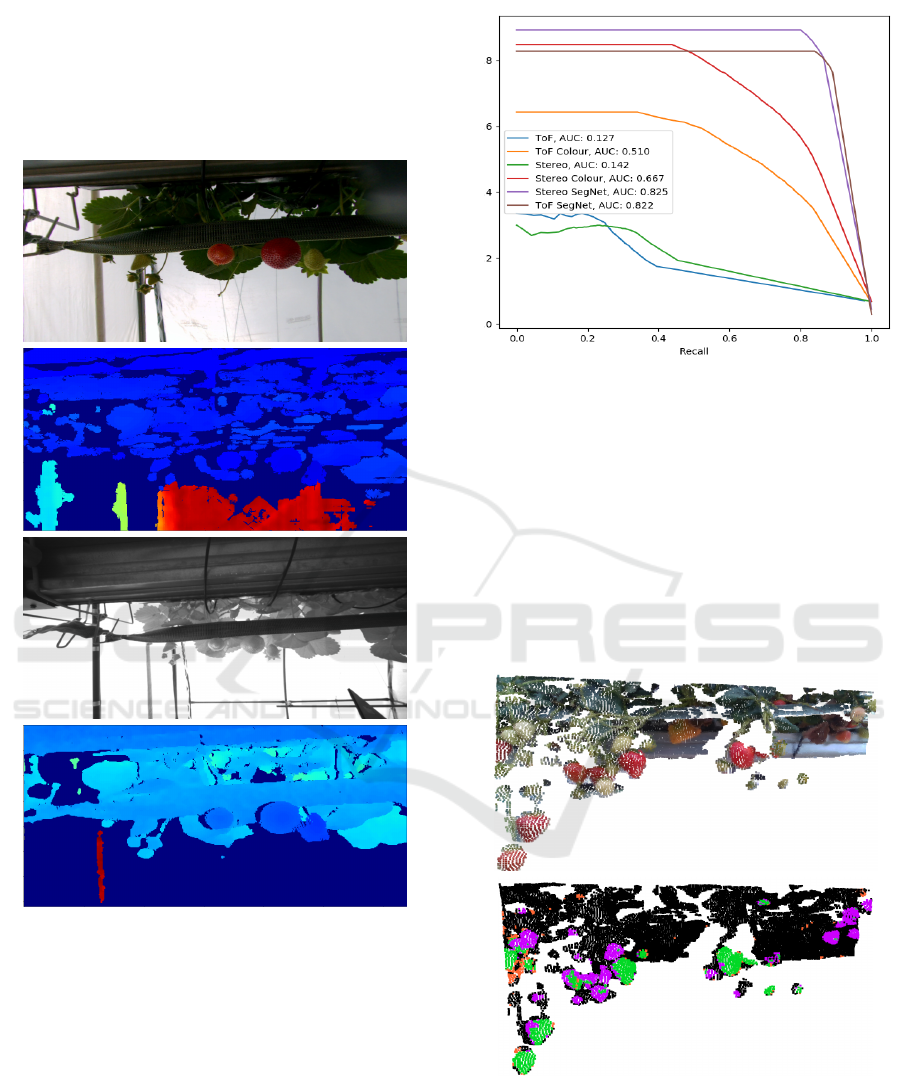
The following qualitative assessment is based on
observing the depth maps captured as shown in Fig-
ure 2. The stereo camera works using infrared spec-
trum (third image from the top in Figure 2, the depth
obtained is very sensitive to variations in exposure
and stereo-matching between both infrared images
captured. The stereo sensor also captures visible in-
formation as far as possible, reducing the amount of
detailed information for small objects and their sur-
faces. Overall the data captured using stereo cam-
era provides inferior depth information compared to
the ToF, and shape information for strawberries is de-
graded. This is mostly due to the lack of features for
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
686
stereo-matching between the two IR cameras. One
can also notice the absence of the IR pattern projected
by the camera. This pattern is supposed to improve
depth with more reliable features to match between
images, but it is here completely dispersed by the
sun’s natural infrared spectrum. The Time-of-Flight
Figure 2: Comparison of depth captured using Stereo and
Time-of-Flight technologies.
camera, on the other hand, can be programmed to cap-
ture information only in a given range depending on
the application. In our data collection, the camera was
set to near-range setting, improving quality of depth
for short ranges (three ranges are usable: Near, Mid,
Far), which suits our application, since the interesting
information is found up to 70 cm away from the cam-
era. Despite this fact, the quality of ToF depth maps
is visually better. This sensor offers a better coverage
of the depth information. The only limitation comes
from the light spectrum used, which corresponds to
some part of the solar infrared spectrum. Flat sur-
Figure 3: Precision-recall curves for the different networks
indicating also area under the curve (AUC).
faces, which are the most reflective, appear slightly
deformed and in some cases with deformations of the
scale matching small strawberries. These qualitative
findings suggest that Time-of-Flight technology suits
better outdoor environments and is especially bene-
ficial for the detection and shape analysis of small
objects such as fruits. Concerning the quality of the
RGB images from both cameras, the stereo camera
provides clearer and higher quality images overall in
an outdoor context.
Figure 4: The segmentation results for PNet
colour
trained on
data from the stereo camera: the original point cloud (top),
segmentation results (bottom). The colours indicate: TP in
green, FP in orange, FN in purple and TN in black.
Evaluation of 3D Vision Systems for Detection of Small Objects in Agricultural Environments
687

Table 4: Comparison of different networks trained on data for stereo and ToF sensors.
Model Camera Dimension Accuracy Kappa Cohen mean IoU
SegNet stereo 2D 98.5% 0.71 0.83
SegNet ToF 2D 99.0% 0.79 0.67
PNet stereo 3D 91.1% 0.43 0.14
PNet ToF 3D 90.0% 0.38 0.15
PNet
colour
stereo 3D 95.4% 0.66 0.48
PNet
colour
ToF 3D 92.5% 0.54 0.39
Figure 5: The segmentation results for PNet
colour
trained
on data from the ToF camera: the original point cloud (top),
segmentation results (bottom). The colours indicate: TP in
green, FP in orange, FN in purple and TN in black.
4.3.2 Network Comparison
To compare both sensors directly, we use the cap-
tured data for training the selected machine learning
networks (see Sec. 3) for each sensor separately. In
addition, we use the following configurations of the
networks and type of input data: SegNet on colour
images, PointNet++ on 3D point clouds only (PNet)
and PointNet++ with additional colour information
(PNet
colour
). The results are presented in Table 1
whilst the precision-recall curves in Figure 3. There is
a clear difference between networks trained with and
without colour information and between networks
trained on ToF and stereo datasets with performances
significantly improved for both datasets. This can be
explained by a greater difference using colour space
between strawberries and background than using only
shape information. The difference in results for dif-
ferent sensors seems to be amplified when colour in-
formation is used and would come from the unre-
liable readings from large surfaces and shapes with
ToF cameras leading to many false positives (FP). The
precision-recall curves confirm these findings. The
high amount of FP is negatively affecting the net-
works trained with 3D information only but improved
significantly for networks trained in colour. With a
very low area under the precision-recall curve, PNet
is the worst performing classifier than PNet
colour
on
our datasets. A 2D network SegNet performs sig-
nificantly better than any of the 3D variants for both
datasets. To illustrate these findings, we provide ex-
ample outputs from PNet
colour
illustrating the quality
of segmentation for both sensors. The stereo dataset
(Fig.4) is characterised by more omissions of straw-
berries with a high number of FN, but less false detec-
tions. The main red and distinct strawberries are how-
ever well segmented. The ToF example (Fig. 5), all
the strawberries are mostly segmented out and there
are few omissions. However, there is a high number
of false positives, especially on the brown/red leaves
of the scene with round shape. These examples pro-
vide additional support for findings based on the nu-
merical values in Table 4.
The superior performance of detectors based on
2D CNNs for our application can be associated with
the structured nature of 2D images, maturity of the
developed networks and also low quality of the depth
data. Also, through post-processing, sufficient spa-
tial information can be retrieved using the depth map
and the 2D segmentation mask, making these algo-
rithms preferable for our application at the time being.
The presented 3D approaches, however, offer an ad-
vantage in direct localisation of the objects, although
their localisation accuracy is a subject of future work.
The real-time suitability of the 3D methods is also
promising, achieving 5 FPS (each frame a point cloud
of ∼64k points) compared to 13 FPS (each frame an
image of 1280 × 720 px) for SegNet.
5 CONCLUSIONS
Capturing 3D data and processing it for different tasks
such as detection, segmentation or classification is
a challenging task especially in the agricultural con-
text presented in this paper. Our study evaluated two
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
688

3D sensing technologies for that purpose and com-
pared 3D and 2D variants of state-of-the-art neural
networks trained on the data collected from a straw-
berry growing farm. These results show encouraging
performance but also allow us to highlight the limita-
tions of current technologies and algorithms. Time-
of-Flight technology, despite its superior quality of
point clouds and shape information, struggles with re-
flective surfaces resulting in a large number of false
detections, while stereo technology, lacking detail in
acquired depth, fails to detect numerous fruits. Tradi-
tional 2D image-based convolutional neural networks
still outperform the 3D networks for the task of fruit
segmentation and therefore are more suited for this
task. This work can be treated as a baseline for fu-
ture work on 3D information for outdoor applications
such as robotic fruit picking and should encourage re-
searchers to pursue more experimentation in such dif-
ficult to counteract limitations found in the paper and
bridge the gap with state-of-the-art techniques in per-
ception for 2D information.
REFERENCES
Armeni, I., Sax, A., Zamir, A. R., and Savarese, S. (2017).
Joint 2D-3D-Semantic Data for Indoor Scene Under-
standing. ArXiv e-prints.
Badrinarayanan, V., Kendall, A., and Cipolla, R. (2015).
SegNet: A Deep Convolutional Encoder-Decoder Ar-
chitecture for Image Segmentation. arXiv e-prints.
Bargoti, S. and Underwood, J. (2016). Deep Fruit Detection
in Orchards. arXiv e-prints.
Barnea, E., Mairon, R., and Ben-Shahar, O. (2016). Colour-
agnostic shape-based 3d fruit detection for crop har-
vesting robots. Biosystems Engineering, 146:57 – 70.
Special Issue: Advances in Robotic Agriculture for
Crops.
Cohen, J. (1960). A coefficient of agreement for nominal
scales. Educational and Psychological Measurement,
20(1):37–46.
Dai, A., Chang, A. X., Savva, M., Halber, M., Funkhouser,
T., and Nießner, M. (2017). ScanNet: Richly-
annotated 3D Reconstructions of Indoor Scenes.
In Proc. Computer Vision and Pattern Recognition
(CVPR), IEEE.
Everingham, M., Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2010). The Pascal Visual Ob-
ject Classes (VOC) Challenge. Int. J. Comput. Vision,
88(2):303–338.
Geiger, A., Lenz, P., and Urtasun, R. (2012). Are we ready
for Autonomous Driving? The KITTI Vision Bench-
mark Suite. In Conference on Computer Vision and
Pattern Recognition (CVPR).
Georg Halmetschlager-Funek, Markus Suchi, M. K. and
Vincze, M. (2018). An empirical evaluation of ten
depth cameras. IEEE Robotics and automation maga-
zine.
Grimstad, L. and From, P. J. (2017). The Thorvald II Agri-
cultural Robotic System. Robotics, 6(4).
Hackel, T., Savinov, N., Ladicky, L., Wegner, J. D.,
Schindler, K., and Pollefeys, M. (2017). SEMAN-
TIC3D.NET: A new large-scale point cloud classifica-
tion benchmark. In ISPRS Annals of the Photogram-
metry, Remote Sensing and Spatial Information Sci-
ences, volume IV-1-W1, pages 91–98.
Jiang, M., Wu, Y., Zhao, T., Zhao, Z., and Lu, C. (2018).
PointSIFT: A SIFT-like Network Module for 3D Point
Cloud Semantic Segmentation. arXiv e-prints.
Kazmi, W., Foix, S., Aleny, G., and Andersen, H. J. (2014).
Indoor and outdoor depth imaging of leaves with time-
of-flight and stereo vision sensors: Analysis and com-
parison. ISPRS Journal of Photogrammetry and Re-
mote Sensing, 88:128–146.
Lehnert, C., English, A., McCool, C., Tow, A., and Perez,
T. (2017). Autonomous Sweet Pepper Harvesting for
Protected Cropping Systems. arXiv e-prints.
Lehnert, C., McCool, C., Sa, I., and Perez, T. (2018). A
Sweet Pepper Harvesting Robot for Protected Crop-
ping Environments. arXiv e-prints.
Li, Y., Bu, R., Sun, M., and Chen, B. (2018). PointCNN:
Convolution On X-Transformed Points. arXiv
preprint arXiv:1801.07791.
Noraky, J. and Sze, V. (2018). Low Power Depth Estimation
of Rigid Objects for Time-of-Flight Imaging. arXiv e-
prints.
Pham, Q.-H., Thanh Nguyen, D., Hua, B.-S., Roig, G.,
and Yeung, S.-K. (2019). JSIS3D: Joint Semantic-
Instance Segmentation of 3D Point Clouds with Multi-
Task Pointwise Networks and Multi-Value Condi-
tional Random Fields. arXiv e-prints.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
Net: Deep learning on point sets for 3d classification
and segmentation. Proc. Computer Vision and Pattern
Recognition (CVPR), IEEE, 1(2):4.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
Net++: Deep hierarchical feature learning on point
sets in a metric space. In Advances in Neural Infor-
mation Processing Systems, pages 5099–5108.
Wang, W., Yu, R., Huang, Q., and Neumann, U. (2017).
SGPN: Similarity Group Proposal Network for 3D
Point Cloud Instance Segmentation. arXiv e-prints.
Wang, X., Liu, S., Shen, X., Shen, C., and Jia, J. (2019).
Associatively Segmenting Instances and Semantics in
Point Clouds. arXiv e-prints.
Yang, B., Wang, J., Clark, R., Hu, Q., Wang, S., Markham,
A., and Trigoni, N. (2019). Learning Object Bounding
Boxes for 3D Instance Segmentation on Point Clouds.
arXiv e-prints.
Yoshida, T., Fukao, T., , and Hasegawa, T. (2018). Fast De-
tection of Tomato Peduncle Using Point Cloud with
a Harvesting Robot. Journal of Robotics and Mecha-
tronics, 30(2):180–186.
Evaluation of 3D Vision Systems for Detection of Small Objects in Agricultural Environments
689
