Mask-guided Image Classification with Siamese Networks
∗
Hiba Alqasir, Damien Muselet and Christophe Ducottet
Universit
´
e Lyon, UJM-Saint-Etienne, CNRS, Institut Optique Graduate School, Laboratoire Hubert Curien UMR 5516,
Keywords:
Siamese Networks, Image Classification, Non-deformable Objects, Mask-guided Classification.
Abstract:
This paper deals with a CNN-based image classification task where the class of each image depends on a small
detail in the image. Our original idea consists in providing a binary mask to the network so that it knows where
is located the important information. This mask as well as the color image are provided as inputs to a siamese
network. A contrastive loss function controls the projection of the network outputs in an embedding space
enforcing the extraction of image features at the location proposed by the mask. This solution is tested on a
real application whose aim is to secure the boarding on ski chairlifts by checking if the safety bar of the carrier
is open or closed. Each chairlift has its own safety bar masks (open and close) and we propose to exploit this
additional data to help the image classification between close or open safety bar. We show that the use of a
siamese network allows to learn a single model that performs very well on 20 different skilifts.
1 INTRODUCTION
Image classification has been improved a lot in the
last decades thanks to deep learning approaches that
extract very accurate features adapted to the specific
dataset on which they are learned (Chen et al., 2019).
The main weakness of these solutions is that they
require to label a large amount of data in order to
get good results. For some applications, the label-
ing step is so time-consuming that alternatives have
to be proposed. In this context, one recent trend is
to provide additional information to the network to
ease the learning with few labeled data. This infor-
mation can be added as constraints on the network
output (Mrquez-Neila et al., 2017; Zhou et al., 2017)
or with additional branches of self-supervised pretext
tasks (Kolesnikov et al., 2019).
In this paper, we are proposing a solution for im-
age classification when the class of a whole image de-
pends on a small detail (few pixels). In order to help
the network to learn accurate features for this task,
we propose to provide an approximate location where
it should “look” to take its decision. The idea is to
make the classification task easier by showing what
kind of detail is important to check before deciding
the class of an image. For this purpose, we propose to
use siamese networks and to provide pairs of images
as inputs: the colored image to be classified as well as
∗
Partially funded by MIVAO, a French FUI project.
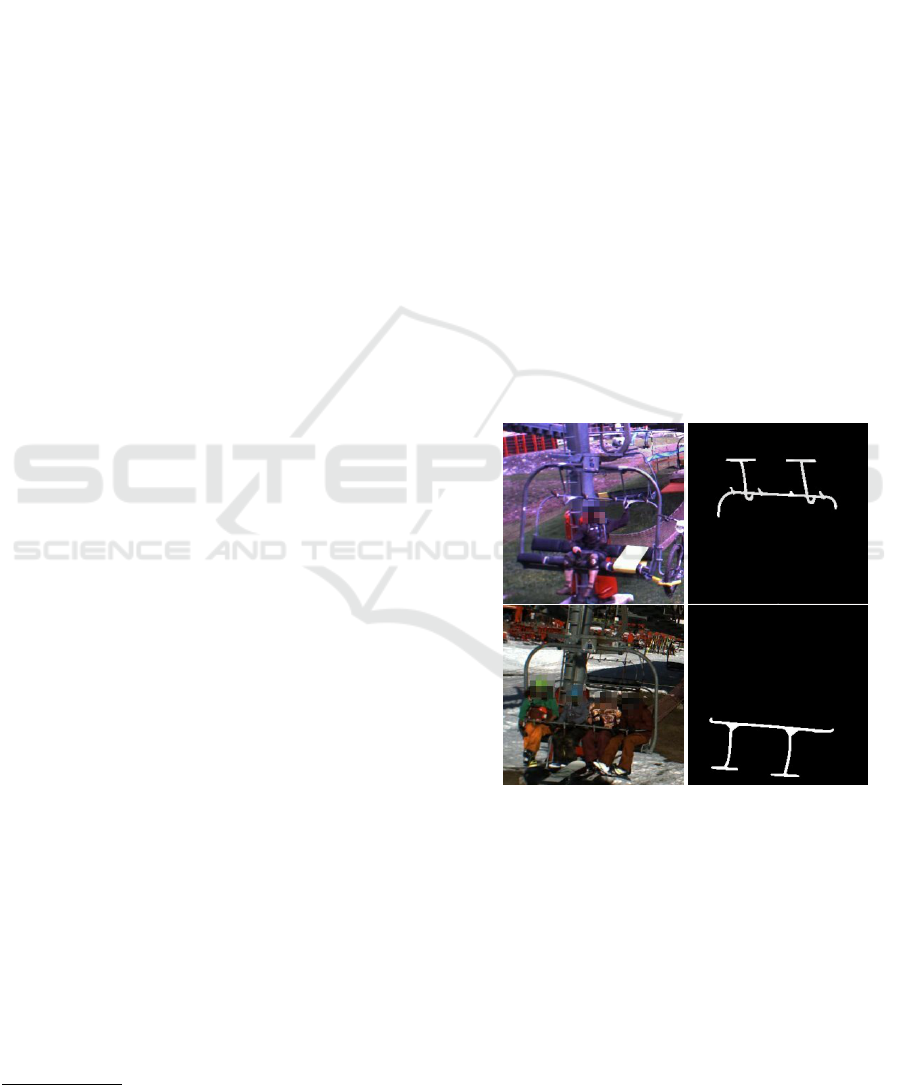
Figure 1: Two images of the same chairlift and the corre-
sponding masks. Top : the safety bar is open, bottom : the
safety bar is closed.
a binary mask where important details of the image
appeared in white over a black background. The used
siamese architecture allows to control the features ex-
tracted from the colored image by forcing them to be
similar to the features extracted from the binary mask.
More specifically, we are working on a video-
surveillance application for chairlift security. This
research is part of MIVAO research project which
was launched in collaboration with the start-up Bluec-
ime, based on the needs of ski lift operators to secure
536
Alqasir, H., Muselet, D. and Ducottet, C.
Mask-guided Image Classification with Siamese Networks.
DOI: 10.5220/0009180005360543
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
536-543
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

boarding on chairlifts. The project aims to develop a
computer vision system that acquires images from the
boarding station of chairlifts, analyzes the important
elements (people, chairlift, chairlift carrier, safety bar,
...) and triggers an alarm in case of dangerous situa-
tions. In this paper, we tackle this problem as a clas-
sification task. Considering that the safety bar has to
be closed when the chairlift leaves the boarding sta-
tion, our goal is to classify the images into images
with open safety bar (called hereafter open images)
and images with close one (close images). Thus, the
class of an image is related to the position of a small
amount of pixels (the safety bar) that can be very hard
to see in classical images (see Figure 1) and whose
shape depends on the chairlift (see Figure 3). In this
paper, we propose an original approach to deal with
these two issues: helping the network to concentrate
on the safety bar for taking its decision and training
it so that it can automatically adapt itself to the con-
cerned chairlift.
Since the safety bar is a non-deformable object
which is always observed with the same viewpoint for
a given chairlift, we can create two binary masks that
represent its shape when it is open (open mask) and
when it is closed (close mask). Each time a new chair-
lift is installed, the operator can easily create these
two mask images by acquiring one image of each
class (open and close) and by drawing the safety bar.
For all the tests, we consider that we have this infor-
mation for all chairlifts. The main point of our work is
to find the best way to introduce this knowledge in the
network. Thus, for one chairlift, we have two masks
and a set of labeled images (open or close). The idea
is to force our network to extract features from close
images that are similar to features of the close mask,
but different from the features of the open mask (and
the reverse for the features extracted from open im-
ages). We found that this approach forces the network
to concentrate on the pixels around the safety bar in
the image in order to classify it. This is a way to de-
crease the difficulty of the classification task so that
a small network with few parameters can solve the
problem without requiring a lot of labeled data. To
the best of our knowledge, this is the first approach to
guide the network with a binary mask for a classifica-
tion task.
A second advantage of using a specific binary
mask for each chairlift is that the siamese network
is not trying to learn general features that should
work on all the chairlifts, but instead it learns spe-
cific features adapted to each chairlift (each mask).
Concentrating on the specificity of each chairlift and
not on the invariance of the features across chairlifts,
is a good way to get more accurate results for each
chairlift. This will be shown in the experiments.
Our contributions are multiple:
• we propose a way to guide the network towards
the interesting location in the image for a classifi-
cation task,
• our solution allows to learn a single network for
a set of different chairlifts by taking care of the
specificity of each one,
• extensive tests, results and illustrations show the
accuracy of our original approach.
2 RELATED WORKS
The most similar approach to ours deals with a per-
son re-identification task (Song et al., 2018), where
the idea is to help the network to extract features only
from the body of the person in the image and not from
the cluttered background. In this aim, the authors pro-
pose to use a binary mask of the person to create three
images: the full image, the body image and the back-
ground image. Then a triplet loss is used to bring
closer the features of the full image and those of the
body alone and to move away the features full images
from those of the background image. Thus, the net-
work is trained to automatically extract the most im-
portant features (i.e. from the body only) from the full
image. This approach requires to design a triplet loss
to extract features from the body but also a siamese
network in order to bring closer images from the same
person and move away images from different person.
This complex architecture is not adapted to our prob-
lem with few labeled images. Another way to ease
the network training with few labeled images is to
add constraints on the outputs. For example, Zhou
et al. propose to introduce geometric constraints in
the output of their network designed to estimate the
3D human pose from non-calibrated 2D images (Zhou
et al., 2017). Since the problem is very hard to solve,
the authors add constraints on the relative size of the
human bones such as: upper and lower arms have a
fixed length ratio, left and right shoulder bones share
the same length, ...
One other way to provide additional information
to a network is to add branches that try to solve some
auxiliary tasks while the main branch concentrates on
the main task. If the auxiliary tasks are well chosen
they will help to solve the main task in such a multi-
task network. For example, in (Lee et al., 2019),
in addition to the main classical detection task (pre-
diction of the location and class of the objects), the
authors are trying to predict some other information
Mask-guided Image Classification with Siamese Networks
537

CNN CNN
W
CNN
Training step Testing step
Figure 2: Principle of our approach.
such as the area portions occupied by each ground
truth box within a window, the distances from the cen-
ter of the box to those of other boxes or a binary mask
between foreground and background. All these data
are available from the ground truth labels but trying
to predict them helps in solving the main detection
task.
Likewise, Channupati et al. improve the results
of their semantic segmentation network by adding a
branch that estimates the depth of the pixels as an aux-
iliary task (Chennupati et al., 2019). Since the depth
was available in their used dataset, they propose to
exploit it at training time and create a multi-task net-
work. At test time, they just remove the depth estima-
tion branch and notice that the main task (semantic
segmentation) is improved.
These last solutions are specific to the considered
tasks and available data at training time. They can not
be applied to our problem.
A part of related works concerns the use of
siamese networks for comparing multimodal images.
Indeed, by providing pairs of images as input and
designing specific losses, the siamese networks are
smart solutions to compare patches from different
modalities (color, infra-red, thermal, sketch, ...).
When the two sub-networks share their weights, the
idea is to extract features that are common to the two
modalities, while when the two sub-networks are dif-
ferent (pseudo-siamese network) the aim is to dis-
cover the features specific to each modality (En et al.,
2018). En et al. propose to exploit the benefits of
these two approaches in a single three-stream net-
work.
Siamese networks are also widely used in the con-
text of object tracking (Li et al., 2019). The idea
there is to learn invariance of object representation (as
in (Zagoruyko and Komodakis, 2015; Simonyan and
Zisserman, 2015)) across time. By providing pairs
of images representing the same object with different
viewpoints, scales, orientations or light source con-
ditions, the network is trained to extract features that
remain stable across all these transformations. Our
goal is a bit different since, we are using siamese net-
works to help the model to concentrate on some parts
of the images while extracting features.
3 OUR APPROACH
The principle of our approach is to use a siamese net-
work structure to learn a function F(X) mapping an
input image X to a low dimensional feature space
well suited to compare this image with two binary
masks corresponding to the specific classes to be
tested (Simo-Serra et al., 2015). Once trained, the
euclidean distance in the feature space can be used to
decide whether the input image belongs to the first or
the second class (cf. Figure 2).
More precisely, in our binary classification prob-
lem, we have a set of N images {I
i
}, i = 1, . . . , N be-
longing to one of the two classes c
op
for open images
and c
cl
for close ones. Additionally, we have two bi-
nary masks M
op
and M
cl
respectively associated to
open and close classes. The siamese structure com-
prises two sister CNNs of the same architecture shar-
ing their weights. Each of the two inputs X is trans-
formed into a low dimensional feature vector F(X)
through the CNN.
At training time, the first input is a color image
I belonging to one of the two classes and the second
one is a binary mask M. The two outputs y
I
= F(I)
and y
M
= F(M) are compared through a contrastive
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
538
loss function L defined by (Hadsell et al., 2006):
L (y
I
, y
M
) = αky
M
− y
I
k
2
+ (1 − α) max(1 − ky
M
− y
I
k, 0)
2
(1)
where k.k denotes the L
2
norm, α = 1 if the class of
the image is the same as the class of the mask and
α = 0 otherwise.
At test time, only one branch of the network is
used to compare, in the feature space, the distance of
a test image to both open and close masks. The in-
ferred image class ˆc is then this of the closest mask.
Formally:
ˆc = argmin
c∈{c
op
,c
cl
}
ky
c
− F(I)k
2
(2)
with y
c
op
= F(M
op
) and y
c
cl
= F(M
cl
).
In our real problem, we address a more general
situation where images and masks belongs to differ-
ent domains. More precisely, in the video surveil-
lance scenario, we want to process with the same
model, images coming form N
S
different chairlifts
of the ski resort (or even from different ski resorts).
Thus, each set of images extracted from a specific
chairlift S
k
, k = 1, . . . N
S
concerns vehicles of a dif-
ferent shape, different number of seats and was taken
from a different viewpoint (cf. Figure 3). We suppose
that for each chairlift S
k
, the two binary masks M
k
op
and M
k
cl
respectively associated to the open and close
safety bar are available.
Then, the training and testing approach proposed
above can be generalized to the multi-domain situa-
tion. At training time, image-mask pairs from all the
domains are given to the siamese network ensuring
that the image and the mask belong to the same chair-
lift. Like in the single domain situation, a pair is posi-
tive if the image and mask labels are of the same class
and negative otherwise. The learned CNN function
F(X) allows to project images and masks of all chair-
lifts in the same embedded space. At test time, each
image I
k
of chairlift S
k
is compared to the two masks
of its corresponding chairlift to infer its class:
ˆc = argmin
c∈{c
k
op
,c
k
cl
}
ky
c
− F(I
k
)k
2
(3)
with y
c
k
op
= F(M
k
op
) and y
c
k
cl
= F(M
k
cl
).
4 EXPERIMENTS
To evaluate the efficiency of our approach we con-
duct experiments in the context of video surveillance
of chairlifts.
4.1 The Chairlift Dataset
The dataset is composed of images from 20 different
chairlifts (called hereafter S
1
, S
2
, S
3
, ..., S
20
) obtained
using the following process. For a given chairlift sev-
eral video recordings are first made in the ski resort in
real conditions. Then, each video is preprocessed to
extract a set of shots containing the passage of a sin-
gle chairlift and three images per passage are further
extracted respectively at the beginning, at the middle
and at the end of the passage. Additionally, each im-
age is registered to have the chairlift coarsely at the
same 2D position, scale and orientation. They are also
resized to 200x200 pixels. As we can see in the exam-
ple images of Figure 3, there is a large diversity be-
tween the chairlifts: carrier 3D geometry, number of
sits, viewpoints, weather conditions, background,. . .
The images are labeled “open” or “close” and, for
each chairlift, two binary masks are provided : the
open mask and the close mask. In total, 17918 color
images and 40 binary masks constitute the dataset.
4.2 Experimental Settings
The images of each chairlift are separated into train,
validation and test sets as presented in Table 1. As we
can see in this table, there are only 100 train images
for each chairlift. We have chosen a small number of
train images because the idea is to propose a solution
that performs well with few labeled images.
Table 1: Distribution of the images in our chairlift dataset.
chairlift
train validation test
op. cl. op. cl. op. cl.
S
1
46 54 39 61 438 462
S
2
53 47 62 38 408 277
S
3
88 12 88 12 444 60
S
4
62 38 45 55 151 148
S
5
68 32 71 29 362 208
S
6
54 46 54 46 283 302
S
7
91 9 95 5 722 89
S
8
64 36 68 32 630 293
S
9
58 42 60 40 389 329
S
10
74 26 77 23 859 344
S
11
24 76 38 62 93 166
S
12
57 43 67 33 125 62
S
13
62 38 56 44 201 184
S
14
71 29 76 24 551 258
S
15
53 47 46 54 763 628
S
16
44 56 41 59 305 383
S
17
87 13 75 25 221 48
S
18
57 43 52 48 298 222
S
19
15 85 14 86 67 422
S
20
56 44 60 40 813 847
Total 1184 816 1184 879 8123 5732
Mask-guided Image Classification with Siamese Networks
539

Figure 3: Example images from our chairlift dataset. The two left images are “open” class while the others are “close” class.
Furthermore, since the idea is to propose a single
network for all the chairlifts, we learn the model on
the train images of the 20 chairlifts along with the cor-
responding 40 masks. Likewise, we use the validation
images to validate the model (early-stopping) and the
test images to check the accuracy of the learned net-
work.
The inputs of our siamese network are pairs of im-
ages constituted by one color image of one chairlift
and one of the two corresponding masks. While train-
ing, we make sure that the positive and negative pairs
are well balanced, so that we consider:
• 50% positive pairs: (open image - open mask) and
(close image - close mask)
• 50% negative pairs: (open image - close mask)
and (close image - open mask)
Since the siamese network is perfectly symmet-
ric with shared weights between the two sisters, the
images and masks must have the same size. Conse-
quently, we have transformed the masks in order to
have their depth equals to 3 (as RGB images) by con-
catenating it three times along the channel dimension.
4.3 Baseline Network
Considering the high intra-class diversity and the
small number of training images, we choose as a base-
line a simple network classifier composed of:
• 1 convolutional layer with 32 convolutions 3x3
and ReLU activation,
• 1 convolutional layer with 64 convolutions 3x3
and ReLU activation,
• 1 MaxPooling layer 2x2,
• 1 fully connected layer with 2 outputs and Soft-
max activation.
This architecture is used as a baseline classifier
but also as one sister of our siamese network, so that
the numbers of parameters to learn on both networks
(simple classifier and our siamese network) are the
same and equal to 1.2 millions.
Obviously, for our siamese network, we remove
the last SoftMax activation because the outputs of our
network correspond to coordinates in our embedding
space. We do not want to maximize one over the sec-
ond one or to sum them to one. Thus, our embedding
space has only 2 dimensions. This is maybe not the
best choice to optimize the results, but it allows to
observe the distribution of the features. The aim of
this paper is not to get the best possible results, but
rather to check if transforming a simple network to a
siamese one and adding spatial information helps to
improve the results.
All the networks in this paper are randomly initial-
ized, and trained using back-propagation algorithm
and stochastic gradient descent optimization method
with learning rate decay and Nesterov momentum.
The maximum number of epoch is set to 1000 but
we use early-stopping, which means that the training
stops once the model performance stops improving on
the validation dataset. The learning rate is set to 10
−5
,
the learning rate decay to 10
−8
and the momentum to
0.9.
4.4 Results
4.4.1 Train and Test on the 20 Chairlifts
Table 2 shows the accuracy obtained by the two tested
networks on the chairlift dataset. For each column,
only one single model is trained on the 2000 train im-
ages of the 20 chairlifts and it is tested on each chair-
lift.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
540
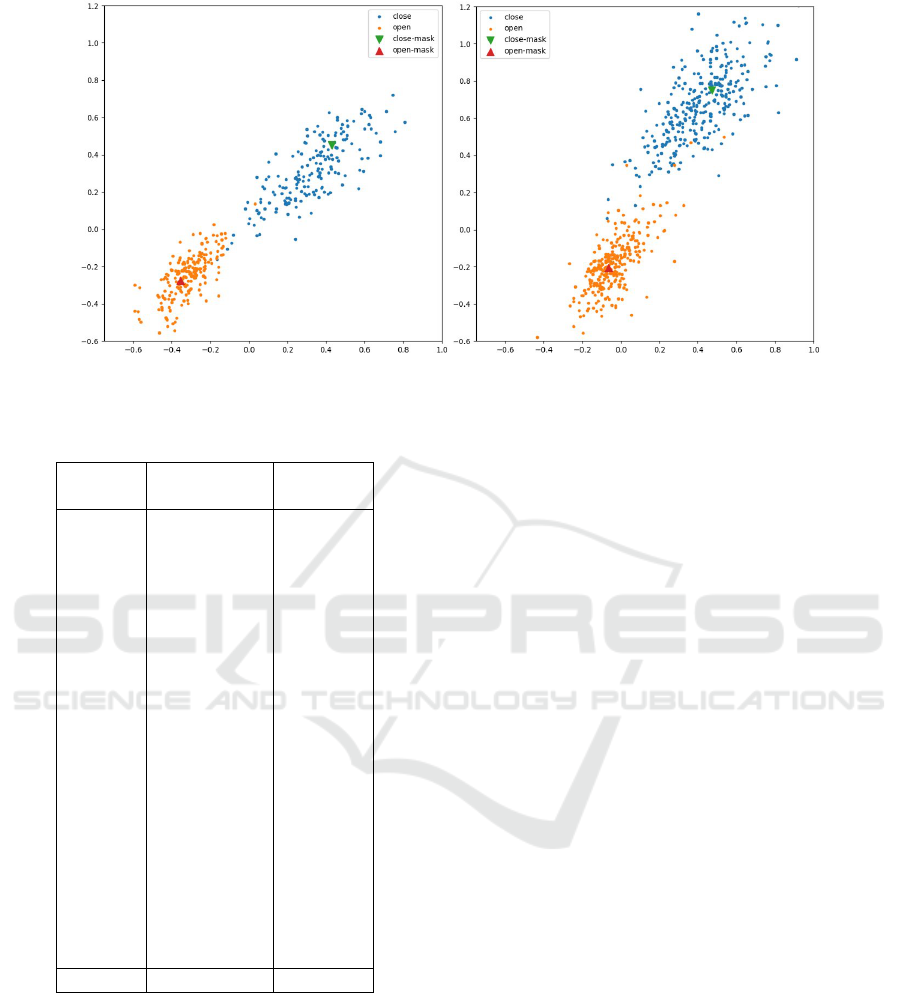
Figure 4: Projections in the 2D embedding space of the images and masks of 2 different chairlifts.
Table 2: Accuracy of the two models trained and tested on
the 20 chairlifts.
chairlift Our Siamese Simple
network Classifier
S
1
95.39 94.11
S
2
93.80 92.55
S
3
94.64 88.89
S
4
93.31 90.64
S
5
94.04 93.68
S
6
97.35 95.04
S
7
93.59 93.83
S
8
87.43 79.52
S
9
94.15 94.29
S
10
94.43 92.77
S
11
99.03 94.59
S
12
100.0 99.47
S
13
96.23 95.58
S
14
91.29 88.01
S
15
78.25 70.17
S
16
90.84 85.03
S
17
94.98 92.19
S
18
95.19 87.50
S
19
95.09 95.50
S
20
82.98 80.66
Average 90.94 87.76
In this table, we notice that our siamese network
outperforms the simple classifier for all the chairlifts
and provides an average accuracy of 90.94% over the
whole dataset, compared to 87.76% obtained by the
simple classifier. Since these two networks have the
same architecture and number of parameters, these re-
sults clearly show that inserting the location of the
safety bar with a binary mask into the network is help-
ing to extract more accurate features.
Since we have chosen a small embedding space
with 2 dimensions, we can project each image and
mask in this space and observe the distributions. Fig-
ure 4 shows such distributions for 2 different chair-
lifts. In this figure, we can see the impact of the
contrastive loss on the distributions. Indeed, this loss
brings closer the open (resp. close) images around
the corresponding open (resp. close) mask and move
them away from the close (resp. open) images and
close (resp. open) mask. This is clear on the illustra-
tions of Figure 4.
This is worth mentioning that there is a single 2D
embedding space and that all these points could have
been drawn in a single plot, but for the sake of clar-
ity, we have preferred to display one plot per chairlift.
The distributions of the masks of the 20 chairlifts are
shown in Figure 5.
This mask distribution shows two important
things. First, the two masks of each chairlift are far
away from each other. This is due to the contrastive
loss that moves away the open images and masks from
the close images and masks. Second, although there is
no constraint in the loss forcing the open masks (resp.
close masks) to be close together, we notice that this
is almost the case and we can see two clouds, one
with the open masks and one with the close masks.
Indeed, only one open mask (namely, 15) is located
in the close mask cloud. This distribution is due to
the fact that all the images and masks are projected in
a single embedding space and so there are some ge-
ometric similarities between points that are close in
this space.
The results of the previous tests clearly show that
when few labeled data are available it is very interest-
ing to guide the network with a binary mask in order
to highlight the most important part of the images.
Mask-guided Image Classification with Siamese Networks
541
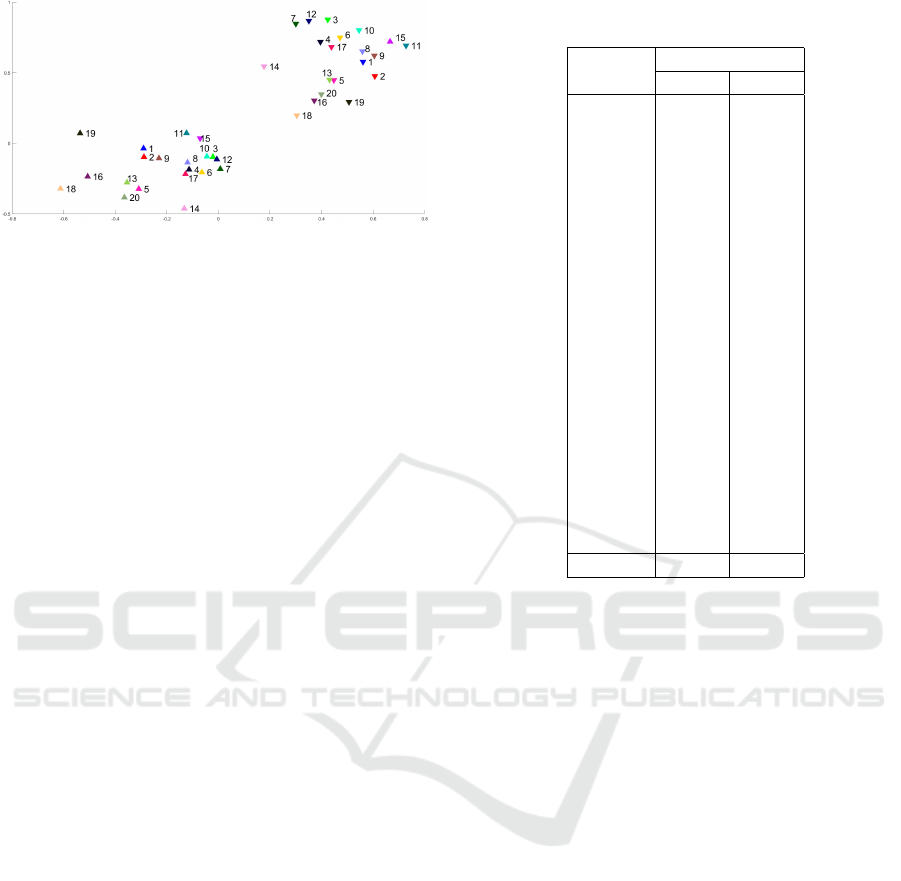
Figure 5: Distribution of all the masks of the 20 chairlifts in
the embedding space. Up triangles are for open masks while
down triangles are for close masks. The legend numbers are
referred to the number of each chairlift.
In the next section, we are going to test the same
networks on a much larger dataset to check if the re-
sults are boosted and if these tiny networks can pro-
vide as good results as much deeper networks.
4.4.2 Training on a Large Dataset
For this experiment, we have considered the same 20
chairlifts but we have considered much more labelled
train images. The number of train images of this large
dataset is presented in Table 3. The validation and test
sets are exactly the same as for the previous dataset
(see Table 1).
The increasing of the number of train images is
going to boost the performance of the two previous
networks and we would like to compare their results
with much deeper networks trained on the same data.
We have chosen the classical VGG16 network (Si-
monyan and Zisserman, 2015) and ResNet50 (He
et al., 2016) pretrained on Imagenet (Deng et al.,
2009) and finetuned on our large chairlift dataset. The
numbers of parameters of VGG16 and ResNet50 are
15.2 millions and 23 millions. Testing these deep net-
works on the same data as our tiny siamese networks
is a good way to check if it can provide as good re-
sults as deeper and pretrained networks despite its ar-
chitecture that is not at all optimized. We recall that
its embedding space has only two dimensions in or-
der to be able to observe the distributions for analysis
purpose.
The results of the four tested networks are pre-
sented in Table 4. Several comments can be done
about these results. First, the increasing of the train-
ing set boosts the performances of the two tiny net-
works, namely our siamese network and the simple
classifier. We notice that our siamese network still
outperforms its equivalent simple classifier for al-
most all the chairlifts, showing again the importance
of providing a mask with spatial information in the
model. Furthermore, the results of our siamese net-
Table 3: Distribution of the train images in the large chairlift
dataset.
chairlift
train
open close
S
1
1209 1239
S
2
1003 800
S
3
1249 142
S
4
449 418
S
5
1034 524
S
6
725 733
S
7
2024 209
S
8
1716 776
S
9
1137 853
S
10
2445 1048
S
11
206 495
S
12
316 218
S
13
638 436
S
14
1309 624
S
15
2018 1646
S
16
993 899
S
17
651 123
S
18
829 625
S
19
188 1120
S
20
2022 1511
Total 22161 14439
work are almost perfect reaching an average accu-
racy of 99.44% which is nearly the same as the ones
provided by the much deeper networks VGG16 and
ResNet50.
5 CONCLUSION
In this paper, we have presented an original solution
to introduce additional data in a network. Consider-
ing a classification problem where the class of each
image depends on the location of a thin bar, we have
proposed to represent the knowledge of the shape and
coarse position of this bar with a binary mask. This
mask and the color image are the two inputs of a
siamese network that extracts and projects their fea-
tures in an embedding space. We have applied this
solution to the video-surveillance of ski lifts, where
the images have to be classified whether they have a
safety bar open or closed. The training step consists
in extracting features from close images that are sim-
ilar to features of the close mask, but different from
the features of the open mask (and the reverse for the
features extracted from open images). During the test
step, we just extract features from each image and
check if they are closer from the features of the open
or of the close masks. Experimental results show
that this architecture is able to extract specific features
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
542
Table 4: Accuracy of the four models trained on the large
chairlift dataset.
chair. Our Simp. ResNet VGG
Siam. Class. 50 16
net.
S
1
99.67 98.78 100.0 100.0
S
2
99.12 95.77 99.71 100.0
S
3
99.11 98.60 100.0 99.60
S
4
99.49 96.32 100.0 100.0
S
5
99.39 98.18 100.0 100.0
S
6
99.66 99.32 100.0 100.0
S
7
99.26 95.31 100.0 99.88
S
8
99.46 97.82 99.98 99.67
S
9
100.0 98.19 100.0 100.0
S
10
99.75 98.59 100.0 100.0
S
11
98.84 97.30 100.0 100.0
S
12
100.0 100.0 100.0 100.0
S
13
99.48 98.18 99.22 100.0
S
14
100.0 99.88 99.89 100.0
S
15
99.89 98.56 99.78 99.86
S
16
98.98 94.77 99.27 99.13
S
17
98.33 97.80 99.26 98.51
S
18
99.81 98.27 100.0 100.0
S
19
99.59 99.80 100.0 100.0
S
20
98.83 97.35 99.58 99.94
Av. 99.44 97.71 99.98 99.76
from each chairlift. Indeed, a single siamese network
trained on 20 different chairlifts provides very good
results on each of these chairlift. Furthermore, when
the training set is large enough, our small siamese net-
work provides as good results as much deeper net-
works such as VGG16 or ResNet50. Future works
will consist in assessing the generalization ability of
our approach by testing our siamese network on new
unseen chairlift with different 3D geometries.
REFERENCES
Chen, W., Xie, D., Zhang, Y., and Pu, S. (2019). All you
need is a few shifts: Designing efficient convolutional
neural networks for image classification. In The IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR).
Chennupati, S., Sistu, G., Yogamani, S., and Rawashdeh, S.
(2019). Auxnet: Auxiliary tasks enhanced semantic
segmentation for automated driving. In International
Conference on Computer Vision Theory and Applica-
tions (VISAPP).
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-Fei,
L. (2009). Imagenet: A large-scale hierarchical image
database. In The IEEE Conference on Computer Vi-
sion and Pattern Recognition (CVPR).
En, S., Lechervy, A., and Jurie, F. (2018). Ts-net: combin-
ing modality specific and common features for mul-
timodal patch matching. In 2018 IEEE International
Conference on Image Processing (ICIP). Ieee.
Hadsell, R., Chopra, S., and LeCun, Y. (2006). Dimension-
ality reduction by learning an invariant mapping. In
2006 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR’06), volume 2, pages 1735–
1742. IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In The IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Kolesnikov, A., Zhai, X., and Beyer, L. (2019). Revisit-
ing self-supervised visual representation learning. In
2019 IEEE conference on computer vision and pattern
recognition (CVPR). Ieee.
Lee, W., Na, J., and Kim, G. (2019). Multi-task self-
supervised object detection via recycling of bounding
box annotations. In 2019 IEEE conference on com-
puter vision and pattern recognition (CVPR). Ieee.
Li, B., Wu, W., Wang, Q., Zhang, F., Xing, J., and Yan,
J. (2019). Siamrpn++: Evolution of siamese visual
tracking with very deep networks. In The IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Mrquez-Neila, P., Salzmann, M., and Fua, P. (2017). Impos-
ing hard constraints on deep networks: Promises and
limitations. In CVPR Workshop on Negative Results
in Computer Vision.
Simo-Serra, E., Trulls, E., Ferraz, L., Kokkinos, I., Fua, P.,
and Moreno-Noguer, F. (2015). Discriminative learn-
ing of deep convolutional feature point descriptors. In
Proceedings of the IEEE International Conference on
Computer Vision, pages 118–126.
Simonyan, K. and Zisserman, A. (2015). Very deep con-
volutional networks for large-scale image recognition.
In International Conference on Learning Representa-
tions.
Song, C., Huang, Y., Ouyang, W., and Wang, L. (2018).
Mask-guided contrastive attention model for person
re-identification. In 2018 IEEE conference on com-
puter vision and pattern recognition (CVPR). Ieee.
Zagoruyko, S. and Komodakis, N. (2015). Learning to com-
pare image patches via convolutional neural networks.
In Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pages 4353–4361.
Zhou, X., Huang, Q., Sun, X., Xue, X., and Wei, Y. (2017).
Towards 3d human pose estimation in the wild: A
weakly-supervised approach. In 2017 IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
398–407.
Mask-guided Image Classification with Siamese Networks
543
