
A Design of the ViaBots Model for Industrial Assembly Line
Application
Mara Pudane
a
, Arturs Ardavs
b
, Egons Lavendelis
c
, Leonards Elksnis
d
, Aiga Andrijanova
e
,
Peteris Ecis
f
, Arturs Oniscenko
g
and Agris Nikitenko
h
Department of Artificial Intelligence and Systems Engineering, Riga Technical University, Kalku 1, Riga, Latvia
{mara.pudane, arturs.ardavs, egons.lavendelis, leonards.elksnis, aiga.andrijanova, peteris.ecis,
Keywords: Adaptive Systems, Multi-agent Systems, Viable Systems Model, Heterogeneous Multi-robot Systems.
Abstract: Due to growing requirement of Industry 4.0 and general robotics infiltration into everyday life and industry
applications, the adaptive heterogeneous multi-robot systems have become highly significant topic. While the
adaptivity as a phenomena has not been researched for a long time in robotic systems, the organisational
theory has analysed the adaptivity in long term, or viability, for several decades. ViaBots is organisational
theory based framework for technical systems, that defines the functions that the system must fulfil to be
viable. The goal of this paper is to present a design of the ViaBots model in case of heterogeneous multi-robot
system, in particular, for an industrial assembly use-case.
1 INTRODUCTION
The number and functionality of robotic devices,
including autonomous robots, robot manipulators
etc., in the past years have grown rapidly. Such a rise
in the possibilities has also boosted new requirements
for robotic systems in general; they call for fully
adaptive multi-robot systems that can adapt to the
changes in the system itself, as well as to the
fluctuations of the external environment (Dario,
2017). Such adaptive systems would offer multiple
benefits, including fault-tolerance, enhanced
behaviours of the system, and minimal human
intervention. Only then it would be possible to talk
about true autonomy of robotic systems.
However, it is hard to achieve such general long-
term adaptivity that allows the system to adapt to
different tasks that are not foreseen in the original
design. There are some robotic systems, that manage
to achieve at short-to-middle-term autonomy in
a
https://orcid.org/0000-0002-9188-5478
b
https://orcid.org/0000-0002-4430-8037
c
https://orcid.org/0000-0001-9912-035X
d
https://orcid.org/0000-0001-8801-6071
e
https://orcid.org/0000-0002-2509-6235
f
https://orcid.org/0000-0001-6088-5873
g
https://orcid.org/0000-0002-2189-4053
h
https://orcid.org/0000-0002-5701-3094
specific cases, such as adaptivity to workload or
changes in system configuration (Ardavs et al., 2019).
However, there are little systems that are designed to
adapt to potential rapid changed.
Adaptivity and systems’ ability to persist over
long periods of time has been researched extensively
in the Organisational theory. The Viable Systems
Model (VSM) defines the functions and functional
dependencies that the system needs to be adaptive in
long term, i.e., viable (Beer, 1985). VSM has been
applied to technical systems as well and has showed
promising results.
The remainder of the paper is organized as
follows. In Section 2 we explain the existing
problems in the development of adaptive
heterogeneous multi-robot systems, in particular, the
need for theoretical model for multi-robot systems’
functional organisation, and the integration of
heterogeneous robots. In Section 3, the VSM is
described as well as its mappings for a technical
system. Section 4 details application of the model for
Pudane, M., Ardavs, A., Lavendelis, E., Elksnis, L., Andrijanova, A., Ecis, P., Oniscenko, A. and Nikitenko, A.
A Design of the ViaBots Model for Industrial Assembly Line Application.
DOI: 10.5220/0009173709330940
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 933-940
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
933

the use-case design and finally, in Section 5,
conclusions and future work is given, as this is
research in progress.
2 RELATED WORKS
The related work section is divided into two parts:
first of all, the concept of adaptivity in the multi-robot
systems so far is reviewed, looking at existing
examples of the multi-robot systems frameworks, as
well as adaptivity as a concept in other areas.
Secondly, the methods for creating heterogenous
multi-robot systems are reviewed, with the focus on
collaboration among robots.
2.1 The Logical Structure of the
Heterogeneous Multi-robot Systems
In order to achieve a long-term operation, several
architectures have been proposed for adaptive multi-
robot systems. Some examples of such approaches
include NASA’s more universal Autonomous Nano
Technology Swarm (ANTS) concept (Vassev et al.,
2012), or narrower biology-inspired intelligent
control (Jafari & Xu, 2019). Unfortunately, while
most of the studies concentrate on specific missions or
applications of robot teams, only very few propose
formal frameworks or methods of system design. One
of such approaches uses Event-B and PRISM design
methods to derive technical design of the system
through iterative steps and assesses probability of goal
achievement thereby providing guidance for further
developments (Tarasyuk et al., 2013). Similarly, in
(Gerostathopoulos et al., 2016) it is proposed to design
self-adaptive system by using the invariant method.
The developed framework, IRM-SA, tackles the
design complexity of invariant methods thus enabling
the design of such systems.
Current requirement for the robotic systems has
created an emerging need for general formal
framework for design and development of resilient
and adaptive systems (Ardavs et al., 2019). This
framework would have to fulfil two main tasks –
ensure systems’ adaptivity to the changes in the
environment and within itself; and reduce the
complexity of the design process (Ardavs et al.,
2019).
In the organizational theory, a concept of the long
term adaptivity, or viability, has been researched for
several decades, resulting in the VSM (Beer, 1985).
Essentially, the VSM describes the functions and
functional dependencies that the systems need to be
viable. While the VSM initially was only used to
analyse and improve organisation related aspects,
such as information flows (Kirikova & Pudane,
2014), in the recent years due to the new requirements
of multi-robot systems, VSM has been adapted to
some technical systems. Examples of these include
the design of the smart distributed automation
systems (Bonci et al., 2019) as well as cyber security
management (Spyridopoulos et al., 2014). To
authors’ knowledge, the most extensive research on
VSM applicability in the technical systems was done
in (Ardavs et al., 2019) where the technical-systems-
appropriate VSM design was developed and adapted
to conveyor belt simulation in a multi-agent
environment. The results showed that using the VSM
as a logical-level framework enables agent self-
organisation and improves the output of the system.
This leads to conclusion that VSM-based model
would improve the performance of a real system as
well and is applicable to industrial assembly task
done by highly heterogeneous multi-robot system at
the conveyor belt. Another reason to believe this
conclusion, is that the fractal nature aside, the
functions of VSM are similar to MAPE-K loop
introduced by IBM (IBM Coorporation, 2005).
2.2 MAS as a Logical Abstraction
Layer for Multi-robot System
Another challenge regarding heterogeneous multi-
robot systems is enabling the control of the whole
system. As the complexity of robots is growing, the
control of each robot separately becomes increasingly
detailed. The control of multiple robots is an even
more challenging task. Additionally, different robots
of various manufacturers have different interfaces
and operating systems which leads to difficulties in
the integration.
To cope with the complexity in various domains,
a common approach is to develop a layered design
and decision-making architectures. In multi-agent
systems, for example, design is usually divided into
micro and macro level where the micro level concerns
the design of a single agent as opposed to macro level
which includes designing multi-agent system as a
whole (Wooldridge, 2009). Another related approach
to heterogeneous systems, is aggregate computing
which is alternative way for implementing such
systems (Beal et al., 2015). While (Bures et al., 2016)
criticizes MAS as an approach to implement complex
heterogeneous systems, we see VSM as a tool to
mitigate the critic, in particular, of lack of the
architecture in multi-agent systems.
Similarly, the decision making process must be
divided in the multi-robot systems. In this case, three
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
934

abstraction layers must be used (Lavendelis &
Nikitenko, 2015). On the lowest level, the robots
control their mechanisms and perform discrete
actions. On the middle level, the decisions are made
that are needed to fulfil tasks (such as going to
particular location). At the top level, the multi-robot
management decisions are made. These decisions
include cooperation, task distribution and other high-
level tasks that are arguably the most challenging.
In several cases, the developers have used multi-
agent layer for the management of heterogeneous
systems, such as autonomous transport vehicles’
systems (Martin et al., 2019), or multi-robot systems
(Lavendelis & Nikitenko, 2015). In the latter case,
each agent represents a physical device (robot, sensor,
manipulator, etc.) within this abstraction layer. The
high-level decisions are negotiated among agents;
each agent manages the corresponding device. This
allows to abstract from low level details while
performing such tasks as allocation and reallocation,
collaborative mapping, coordination, etc.
Use of multi-agent paradigm also allows building
open systems since a new agent representing a new
device can be added to the system. Still, mechanisms
to adapt the situation to the changes in the
composition of agents are necessary. Since the VSM
deals with the management of the whole system, the
multi-agent system is the level where the VSM is
implemented.
3 ViaBots MODEL
The ViaBots model consists of the VSM functions
transformed into agent-related terms and concepts.
3.1 The Viable Systems Model
The viable systems model consists of five functional
blocks, called subsystems (Beer, 1985). These
functional blocks: S1, S2, S3, S4 and S5 respectively
represent five main functional groups: Operation,
Coordination, Control, Intelligence and Policy. The
instances of the S1 subsystem (Operation) are the
units that perform the actual work in the system, i.e.,
everyday tasks, while the rest of the subsystems
represent the Management functions. S2, or
Coordination performs the tasks of local
management. One S2 instance is attached to every S1
instance. S2 instances negotiate resources, and if no
consensus can be acquired, turn to S3. S3 (Control) is
global level management. The main function of S3 is
to oversee the execution of the global plan by
observing the work of S1 and S2 and, if needed,
redistributing resources. The plan is changed in close
coordination of S3 which is informed of the current
situation in the organisation, and S4 (Intelligence)
which observes external environment and holds the
model of changes in the external environment.
Finally, S5 (Policy) is the subsystem that generates
general policy for the system as well as fulfils the role
of representation.
There are different types of dependencies among
functions (Pudane, 2013). The type a link is between
S1 and S2, as well as between S1 units and external
environment. The goal of these links is to manage
complexity, i.e., reduce the number of states with
which system needs to deal. The b type link is
coordination and negotiation link that exists among
S2 instances. Type c link is directed link that
represents monitoring and is located between S3 and
S1, as well as between S4 and external environment.
Type d link is a cooperation or integration link
between S3 and S4. Finally, type k link is a directed
control link that exists between S5 and S3, S4; S3 and
S2, and S2 and S1.
3.2 The Adaptation of VSM to
Technical Systems
To adapt the VSM to multi-agent system, several
mappings were done (overview in Tables 1 and 2).
First, all the functions of VSM subsystems were
identified and mapped either to agent tasks, or
communications (e.g., negotiations), and the
subsystems themselves where mapped to agent roles.
The roles can then be comprised into agents
dynamically. Such an approach gives more flexibility
since there are no limitations on what physical units
must perform the functions. Then, the roles were
correspondingly mapped into behaviours and tasks
were implemented as procedures. Each agent that
carries out one or several behaviours, can now
represent either a software agent, or a robot. The
Table 1 contains identified functions, corresponding
tasks, task mappings into roles and then – agents.
Table 2 contains the interaction design with functions
that correspond to channels, and multi-agent system
interaction types. The mapping in detail is discussed
in (Ardavs et al., 2019).
4 USE-CASE DESIGN
The benefits of the ViaBots model is best seen in a
larger scale and complexity (Ardavs et. al, 2019), for
this reason use case is a physical assembly line.
Similarly to the simulation in (Ardavs et. al, 2019), it
A Design of the ViaBots Model for Industrial Assembly Line Application
935
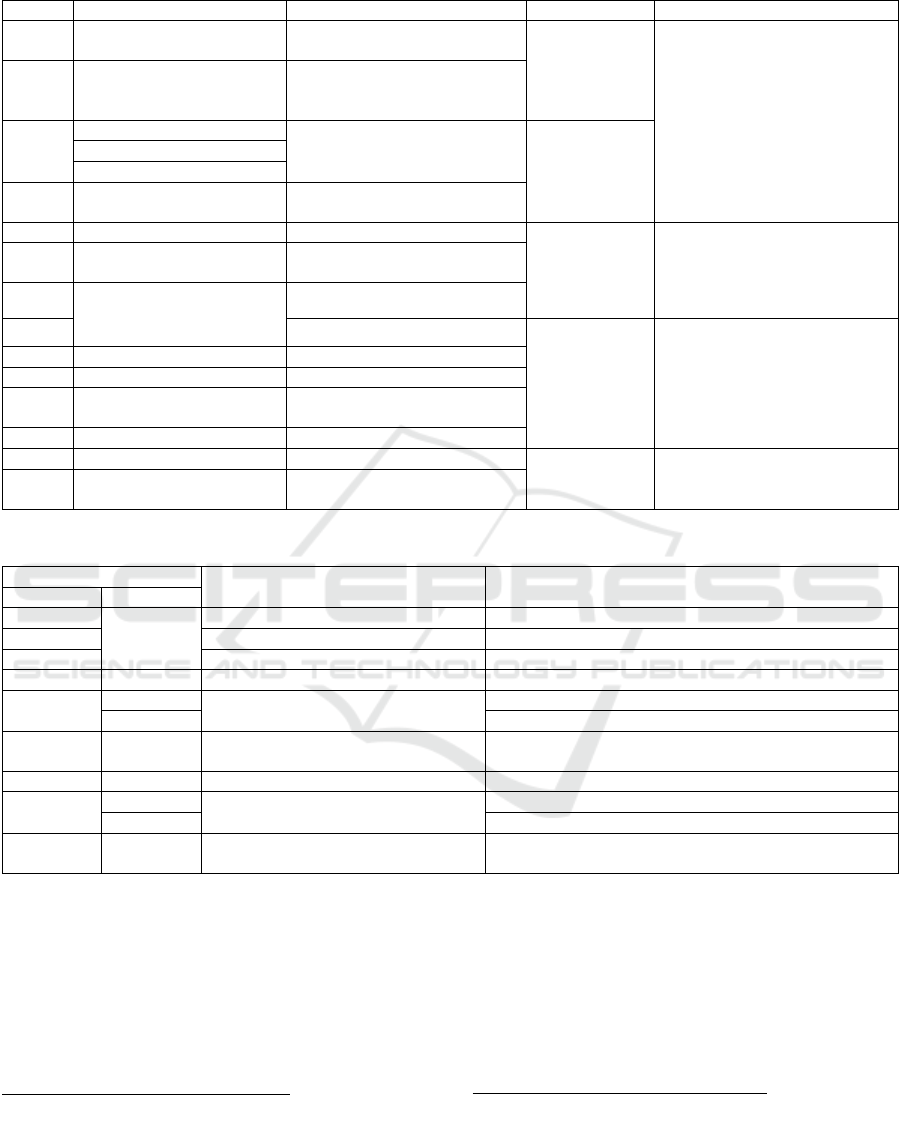
Table 1: Task allocation to roles and role allocation to agents in ViaBots model.
VSM Function Task Role Agent
S1 Depends on the system
1..n tasks depending on the
variety of the agents
1.. n roles
depending on the
domain
Either physical units that carries
out roles (i.e., robots), or the ones
that will run on one computer or in
one domain.
Assigned to agents having variety
reduction and amplification
capabilities
Type A Attenuators and Amplifiers
Attenuate variety task and
amplify variety tasks between
external environment and syste
m
S2
S1 element coordination
Negotiation Task
S2
Solving of conflicts of S1
S1 resource relocation
Type A Attenuators
Attenuate variety task between
Operation and Managemen
t
S3 Resource distribution The resource distribution tas
k
S3
Assigned to one agent irrelevant
from the already assigned roles
S3
Interpretation of policy
decisions
Interpret high level instructions to
lower level tas
k
S3
Development planning
according to environment and
system states
Opinion task-current situation
S4 Opinion task-future states
S4
Assigned to one agent irrelevant
from the already assigned roles
Assigned to agent having
monitoring environment
capabilities
S4 Suggest. for safety polic
y
Safety and resilience tas
k
S4 Learning Learning tas
k
S4
Management of external
contacts
Search task
S4 Environment monitoring Env. monitoring tas
k
S5 Representation HCI tas
k
S5
Assigned to one agent irrelevant
from the already assigned roles
S5
Investment in structure and
p
olicy formation
Policy task
Table 2: The interactions in ViaBots model.
In VSM
Function MAS interaction type
System Channel
S2
Type B
S1 element coordination Coordination protocol
S2 Solving of conflicts of S1 Negotiation protocol
S2 S1 resource relocation Resource negotiation protocol
S2 Type
K
Control channel function Sent once, message-received response
S3
Type
K
Control and
monitoring over S1 and S2
Sent once, message-received response
Type C
I
nform message
S3 and S4 Type D
Development planning according to
environment and system states
Negotiation protocol
S4 Type C Monitoring of system itself
I
nform message
S5
Type C
Monitoring of cooperation of S3 and
S4
I
nform message
Type
K
Sent once, message-received response
Channel Type A
Amplify variety between Operation
and Managemen
t
Broadcast
was decided to build a real-life conveyor belt with
multiple robots as workers.
4.1 The Conveyor Belt Use-case
The following robots are used with the conveyor belt:
in the robotics community well-known packaging
1
Rethink Robotics, 2015. Baxter™ SDK API
Documentation, retrieved from http://api.
rethinkrobotics.com/.
2
ABB Robotics, 2019. Robotics product range. Creating
the flexible, collaborative and connected Factory of the
Future. ABB Robotics.
robot Baxter with fixed base and two synchronized 5
DOF manipulators
1
, an industrial 5 DOF ABB
manipulator
2
and several custom-made 3 DOF
manipulators. Additionally, a humanoid robot with
human-like hands – Pepper
3
is used in case no other
robot is capable to do the tasks. Such a set of robots
is highly heterogeneous in terms of the manipulators
3
Softbank Robotics, 2019. Pepper, retrieved from:
https://www.softbankrobotics.com/us/pepper.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
936
used, time necessary to do the task and parts available
to each robot. At the same time, multiple robots can
do any or most of the tasks. This enables modelling
an assembly line with different robots and as a
consequence necessity to find appropriate task
allocation among the robots to optimize the
performance of the whole assembly line.
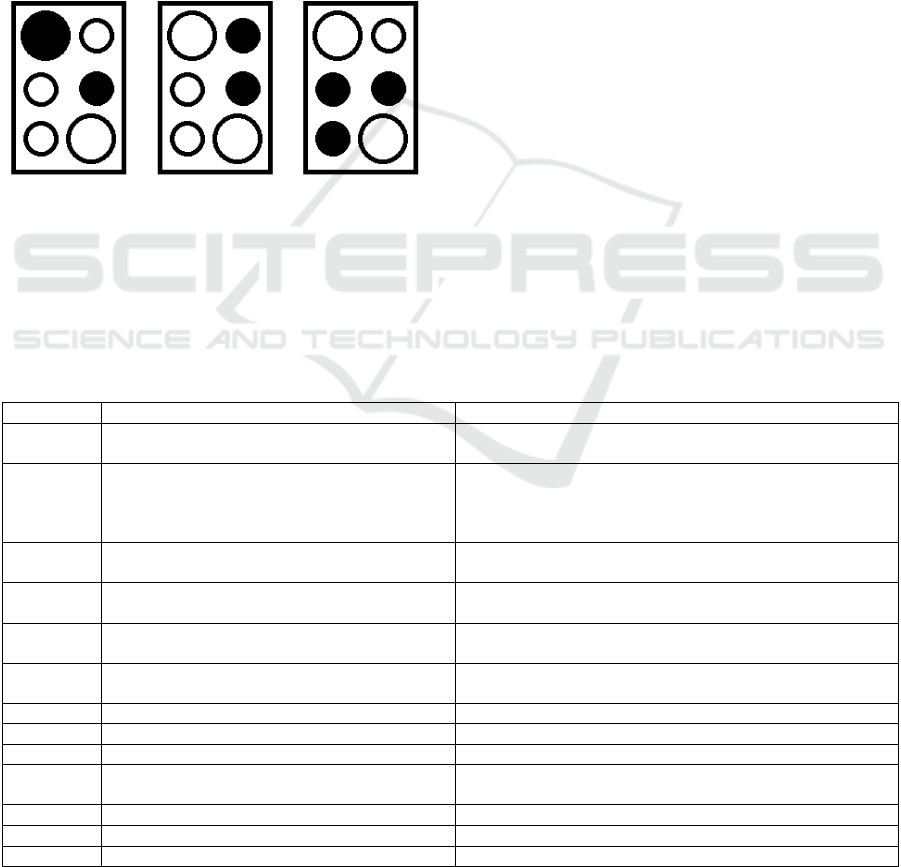
As tasks for the conveyor belt, boxes with round
holes were designed. Robots must insert cones in
these holes in a specific pattern (Figure 1). The
different types of parts are achieved by adding a
marker, to what type the box belongs (i.e., what is the
cone pattern for this particular box type). There are
two sizes of the cones, and not all the robots can insert
both types of the cones.
Figure 1: The tasks for the assembly line - different layouts.
4.2 The Implementation of the Tasks of
the ViaBots Model
The tasks of the ViaBots model were adapted to the
conveyor belt use-case (overview in the Table 3). The
S1 functionality in this case is part assembly that is
modelled as moving the cones from the dispenser to
the boxes. The complexity of the environment is
reduced by robot sensors; we added infrared sensors
to the conveyor belt to simplify the sensor data
processing. Negotiation is performed by S2 agents
based on the time needed for task completion (some
manipulators are slower than others, it takes more
time to pick up bigger cones) and availability of the
details. If manipulator runs out of cones, it is defected
and cannot continue working until additional cones
are added to dispenser.
The interaction among Operation and
Management is performed only when one of the
subsystems S1 cannot continue its work. Such a
situation can occur in the following cases: (a) there
are no more cones of a particular size; (b) the robot
that has the needed cones is working for another S1
unit. In such a case, S3 redistributes resources, i.e.,
makes the S1 units share the same robots.
S4 holds the environment model, i.e., it foresees
the upcoming assembly task sequence; together with
S3 they choose appropriate resource redistribution,
and S3 can ask for external resources (i.e., ask
appropriate resources to the human user). The
assembly task sequence can be changed as a change
in the external environment.
Due to complexity in real-life implementation, S5
was left to user. This concerns overall configuration
of the conveyor belt.
Table 3: The adaptation of ViaBots model tasks to conveyor belt use-case.
In VSM Task Implemented as
S1 1..n tasks depending on the variety of the agents
Robot tasks of picking up a part and placing it in the box in the
corresponding place.
Type A
Attenuate variety task and amplify variety tasks
between external environment and system
The environment was simplified by adding infrared sensors to
announce that the box had arrived. The robot must pick and
place the detail, based on fixed position. S1 is considered to be
the robot manipulator together with infrared sensor.
S2 Negotiation Task
Negotiating among S2 units based on time for part insertion
and available robots
Type A
Attenuate variety task between Operation and
Managemen
t
Intervention required when errors or resource lacking occurs
S3 The resource distribution task
Calculating the times for task execution and enforcing the new
tasks
S3
Interpret high level instructions (policies) to
lower level tas
k
Implemented through human interaction with system
S3 Opinion task based on current situation Weights of the calculated
p
art sequence
S4 Opinion task based on future states
Weights of the foreseen
p
art sequence
S4 Safety and resilience tas
k
Calculating the number of lef
t
-over cones.
S4 Learning task
Part sequence which S4 learns; in this case the part sequences
will be fixed.
S4 Monitoring of environment tas
k
Due to simplicity of environment acquired through S1 and S2
S5 HCI tas
k
Performed by use
r
S5 Policy tas
k
Performed by user.
A Design of the ViaBots Model for Industrial Assembly Line Application
937
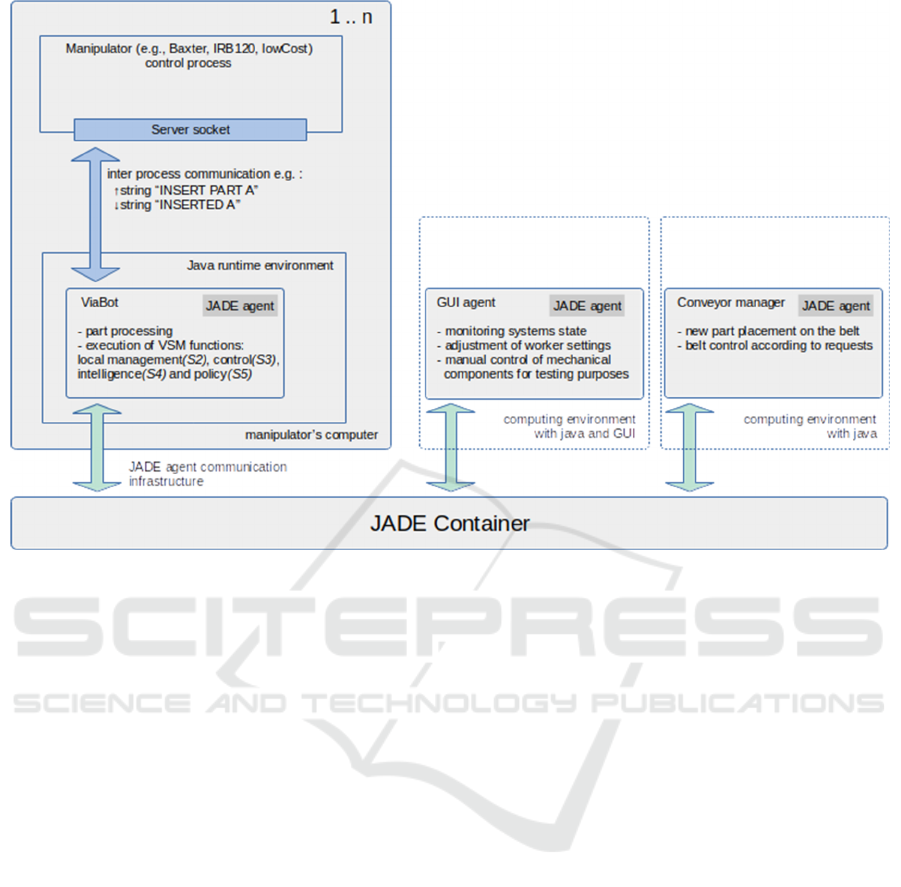
Figure 2: Deployment diagram of the assembly line use-case.
4.3 Overall Scheme of the Use-case
The deployment diagram of the use-case is depicted
in Figure 2. The multi-agent system of the use-case
was implemented in JADE (Bellifemine et al., 2007).
JADE container is populated with an agent for each
of the manipulators by the conveyor belt. Each of
these agents via simple ACL messages (FIPA, 2002)
manages the corresponding manipulators. The
subsystem roles, according to ViaBots model, are
implemented as JADE agent behaviours and are
assigned to agents dynamically. Depending on the
starting sequence, one of the agents runs not only S1
and S2, but also S3 and S4 functions. Physically, the
agents will run on the manipulators’ computers.
Additionally, on a separate computer, a GUI agent
captures the states of the conveyor belt and provides
the user interface to interact with conveyor belt
system. Finally, Conveyor manager is a specific agent
that would control the conveyor belt and move it,
when needed.
In Figure 3, a general sequence diagram of
interaction among the behaviours is depicted.
Conveyor agent serves as a sensor to all the S1
systems and message to S1 agents when the new box
has arrived. It also places incoming boxes on the belt.
All the S2 Behaviours will contain a task that
determines, if the incoming box requires insertion of
the given unit’s type. If the box refers to particular S1
unit, the message is sent to S2 of new task, otherwise,
the box is ignored. Then, the S2 requests to
corresponding S1 agents if they are able to perform
the task and in what time. If the answers are positive,
S2 picks one of the agents to perform the work.
Otherwise, the message is sent to S3 that there are no
resources available. S3 gathers the information from
all the S2 on current situation, as well as information
from the S4 on the future states. Finally, S3 generates
a new resource distribution. If resources cannot be
redistributed, the working cycle ends.
5 CONCLUSIONS AND FUTURE
WORK
The work presented in the paper is on-going research
and the use-case is about to be tested to acquire first
results. The theoretical results achieved earlier in
(Ardavs et al., 2019) based on a simulated
environment has proven the usefulness of the VSM in
the technical systems It was proven in the simulator
that overhead calculations are not significant,
especially with large number of robots. The purpose
of the implementation on a realistic assembly line
done within this paper is to collect data from close to
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
938
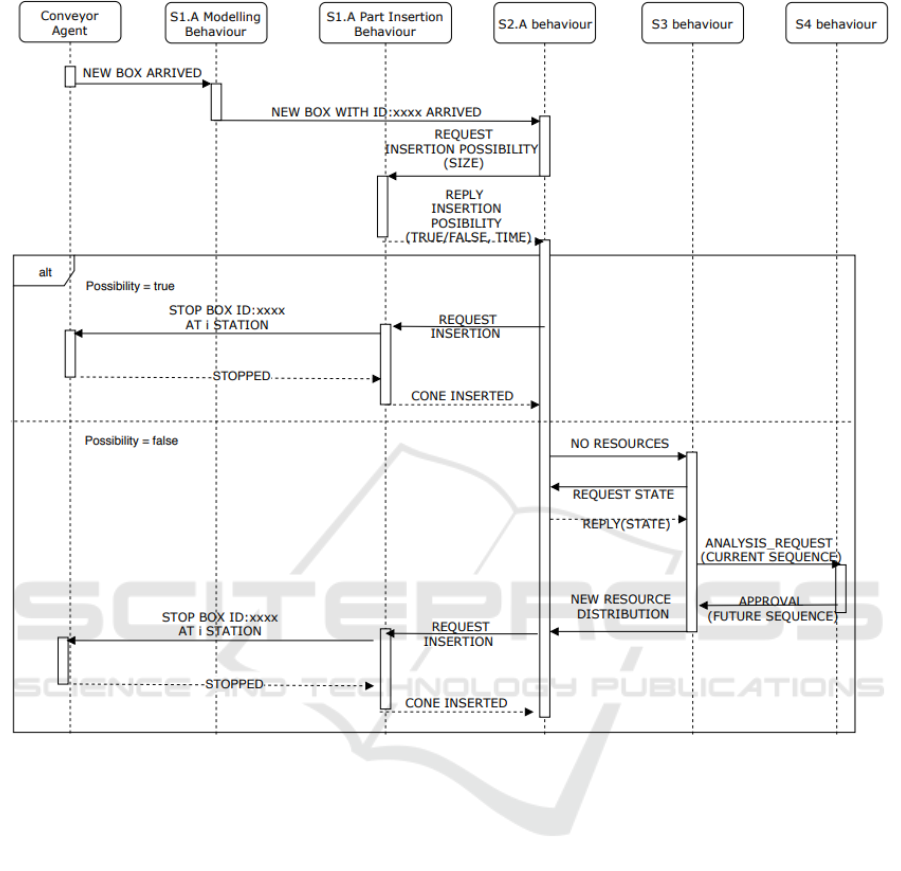
Figure 3: Scenario sequence diagram of the assembly line use-case.
real environment and further analyse the efficiency of
the proposed model. The ultimate goal of the research
is to create a framework for long term adaptivity of
heterogeneous multi-robot systems. This would
enable such systems as robotized assemblers or other
production lines to adapt to unexpected events or
slight changes in the tasks done. At the moment, such
adaptation can be done only by human operator.
The future work is to do experiments in real
environment to compare the efficiency of the
ViaBots-model-based assembly line against the one
with fixed configuration to prove that the results
achieved in simulated environment are valid.
It is planned to introduce unpredictable events to
enable test long-term autonomy in these scenarios. It
must be considered that any system (including natural
systems) can adapt only to tasks that can be physically
done with available tools. For this reason. the
unpredictable events in conveyor case will be
different kinds of assembly tasks, such as a box with
different hole configuration (i.e., 9 holes).
Later on the model will be applied to different
mobile robot based scenarios to validate its
applicability to various tasks since the aim of the
research is to develop a general model that can be
applied to various multi-robot systems.
ACKNOWLEDGEMENTS
This work has been supported by the European
Council Seventh Framework Program FLAG-ERA
project “Rethinking Robotics for the Robot
Companion of the Future” (RoboCom++).
A Design of the ViaBots Model for Industrial Assembly Line Application
939

REFERENCES
Ardavs, A., Pudane, M., Lavendelis, E., Nikitenko, A.,
2019. Long-Term Adaptivity in Distributed Intelligent
Systems: Study of ViaBots in a Simulated
Environment. In Robotics, 8, 25.
Beal, J., Pianini, D., Viroli M., 2015. Aggregate
Programming for the Internet of Things. In Computer,
48, 9, pp. 22-30.
Beer, S., 1985. Diagnosing the Systems for Organizations,
John Wiley & Sons: Pennsylvania, USA.
Bellifemine, F.L., Caire, G., Greenwood D., 2007.
Developing Multi-Agent Systems with JADE (Wiley
Series in Agent Technology). John Wiley & Sons, Inc.:
Hoboken, NJ, USA.
Bonci, A., Pirani, M., Cucchiarelli, A., Carbonari, A.,
Naticchia, B., Longhi, S., 2018. A Review of Recursive
Holarchies for Viable Systems in CPSs. In Proceedings
of IEEE 16th International Conference on Industrial
Informatics (INDIN), Porto, Portugal, July 18-20, 2018,
pp. 37-42.
Bures, T. Plasil, P., Kit, M., Tuma, P., Hoch, N., 2016.
Software Abstractions for Component Interaction in the
Internet of Things. In Computer, 49, 12, pp. 50-59.
Dario, P., 2017. Fet-Flagship proof-of-concept Project:
Rethinking Robotics for the Robot Companion of the
future. Presentation at Ro-Man 2017: 26th IEEE
International Symposium on Robot and Human
Interactive Communication, August 28, 2017.
Foundation for intelligent physical agents (FIPA), 2002,
FIPA ACL Message Structure Specification.
Gerostathopoulos, I., Bures, T., Hnetynka, P., Keznikl, J.,
Kit, M., Plasil, F., Plouzeau, N., 2016. Self-adaptation
in software-intensive cyber–physical systems: From
system goals to architecture configurations. In Journal
of Systems and Software, 122, pp. 378-397.
IBM Coorporation, 2005, An architectural blueprint for
autonomic computing, Autonomic Computing, White
Paper, Third edition IBM: USA.
Jafari, M., Xu, H., 2019. A biologically-inspired distributed
fault tolerant flocking control for multi-agent system in
presence of uncertain dynamics and unknown
disturbance. In Engineering Applications of Artificial
Intelligence, 79, pp. 1-12.
Kirikova, M., Pudane, M., 2014. Viable Systems Model
Based Information Flows. In Proceedings of 17th East
European Conference on Advances in Databases and
Information Systems, New Trends in Databases and
Information Systems, Advances in Intelligent Systems
and Computing, 241(1), pp. 97-104.
Lavendelis, E., Ņikitenko, A., 2015. Software Abstraction
Layer Based Multi-Robot System Technology. In STO-
MP-AVT-241 - Technological and Operational
Problems Connected with UGV Application for Future
Military Operations, Poland, Rzeszow, 20-22 April,
2015. Rzeszow: NATO STO, pp.18.1-18.8.
Martin, J., Casquero, O., Fortes, B., Marcos, M., 2019. A
Generic Multi-Layer Architecture Based on ROS-
JADE Integration for Autonomous Transport Vehicles.
In Sensors, 19, 69.
Pudane, M., 2013. Knowledge Flow Analysis using Viable
Systems Model, Master Thesis, Riga Technical
University, Riga, Latvia (in Latvian).
Spyridopoulos, T., Maraslis, K., Tryfonas, T., Oikonomou,
G., Li, S., 2014. Managing cyber security risks in
industrial control systems with game theory and viable
system modelling. In Proceedings of 2014 9th
International Conference on System of Systems
Engineering (SOSE), Australia, June 9-13, pp. 266-271.
Tarasyuk, A., Pereverzeva, I., Troubitsyna, E., Laibinis, L.,
2013. Formal Development and Quantitative
Assessment of a Resilient Multi-robotic System. In
Proceedings of: SERENE 2013: International
Workshop on Software Engineering for Resilient
Systems, Kiev, Ukraine, October 3-4.
Vassev, E., Sterritt, R., Rouff, C., Hinchey, M., 2012.
Swarm Technology at NASA: Building Resilient
Systems. In IEEE IT Professional, 14, pp. 36-42.
Wooldridge, M., 2009. An Introduction to MultiAgent
Systems. Wiley Publishing, 2nd Edition.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
940
