
A New Diversity Maintenance Strategy based on the Double Granularity
Grid for Multiobjective Optimization
Junzhong Ji, Yannan Weng and Cuicui Yang
College of Computer, Beijing University of Technology, Beijing Municipal Key Laboratory of Multimedia and Intelligent
Software, Beijing Artificial Intelligence Institute, Pingleyuan 100, Chaoyang District, Beijing, China
Keywords:
Multiobjective Optimization, Diversity Maintenance, Double Granularity Grid.
Abstract:
The diversity maintenance of nondominated solutions is crucial for solving multiobjective optimization prob-
lems. The grid strategy is a very effective way to maintain the diversity of nodominated solutions, but the
existing grid strategies all adopt single-layer grid structure, which has weak ability for judging the distribution
of nodominated solutions in the hyperboxes with the same crowding degree. To further explore the ability of
the grid strategy for maintaining the diversity of nondominated solutions, this paper presents a new diversity
maintenance strategy based on the double granularity grid. The double granularity grid strategy firstly parti-
tions the hyperboxes with the same largest crowding degree into fine granularity hyperboxes. Then, it selects
nondominated individual solutions according to the solution distribution in both coarse and fine granularity
hyperboxes, which can avoids randomness for selecting individual solutions in the single grid structure. To
validate the performance of the double granularity grid strategy, we first integrated it with two famous algo-
rithms, then tested the two integration algorithms by comparing them with the original algorithms and four
other state-of-the-art algorithms.The experimental results validate the powerful advantages of the proposed
double granularity grid strategy.
1 INTRODUCTION
Multiobjective optimization problems (MOPs) con-
sist of multiple conflicting objectives that need to
be optimized simultaneously, and widely exist in so-
cial life and engineering applications (Deb, 2001;
Deb, 2014). Generally, there is no single solu-
tion for MOPs, but rather a set of alternative so-
lutions, called Pareto optimal solutions or nondom-
inated solutions. Population evolution-based algo-
rithms including evolutionary and swarm intelligence
algorithms, which are considered to be very suit-
able for solving MOPs due to their property of
achieving an approximation of the Pareto in a single
run (Aimin Zhou and Zhang, 2011; Margarita and
Coello, 2006), and such algorithms are called evo-
lutionary multiobjective optimization (EMO) algo-
rithms. Over the past few decades, some well-known
EMO algorithms have been proposed, such as NSGA-
II (K. Deb and Meyarivan, 2000), IBEA (Eckart
and K
¨
unzli, 2004), PESA-II (Corne D W, 2001),
MOEA/D (Zhang and Li, 2007), MOPSO (Coello
et al., 2004), NSLS (Bili Chen and Zhang, 2015) and
so on. Usually, these algorithms pursue two goals:
minimizing the distance between the obtained Pareto
front and true the Pareto front (ie., convergence) and
maximizing the distribution of the obtained Pareto op-
timal solutions (ie., diversity) (Ge et al., 2019). That
is, most EMO algorithms need to balance both con-
vergence and diversity in order to get a set of uni-
formly distributed optimal solutions. Clearly, it is
very important to keep the diversity of nondominated
solutions found in the optimization. Up to now, re-
searchers have proposed different diversity mainte-
nance strategies, including niche, clustering, kth near-
est distance and grid (Li et al., 2014).
In the existing diversity maintenance strategies,
the grid strategy has an inherent property of reflect-
ing the diversity of individuals in a population (Yang
et al., 2013; X. Cai and Zhang, 2017). Corne and
Knowles developed PAES algorithm (Pareto Archive
Evolution Strategy) (JD and DW, 2000), which is
the first algorithm to introduce the grid strategy to
maintain the diversity of the nondominated solutions.
Afterwards, they proposed other two different algo-
rithms, PESA (The Pareto Envelope-based selection
algorithm) (Corne et al., 2000) and PESA-II (Corne
D W, 2001), based on the grid strategy. PESA adopts
individual selection based on the grid strategy, and
PESA-II uses region selection. Coello et al. pre-
88
Ji, J., Weng, Y. and Yang, C.
A New Diversity Maintenance Strategy based on the Double Granularity Grid for Multiobjective Optimization.
DOI: 10.5220/0009167500880095
In Proceedings of the 9th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2020), pages 88-95
ISBN: 978-989-758-397-1; ISSN: 2184-4313
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

sented MOPSO algorithm (Handling Multiple Ob-
jectives With Particle Swarm Optimization) (Coello
et al., 2004), which adopted the adaptive grid strategy
to preserve the diversity of nondominated solutions.
These existing grid-based algorithms have proved the
validity of the grid strategy in maintaining the diver-
sity of nondominated solutions. However, these algo-
rithms only use single-layer grid structure, and ran-
domly select a hyperbox or an individual when mul-
tiple hyperboxes contain the same amount of individ-
uals, which may undermine the diversity of the non-
dominated solutions in the crowded area.
To further explore the ability of the grid strat-
egy for maintaining the diversity of nondominated so-
lutions, this paper presents a novel diversity main-
tenance strategy based on the double granularity
grid(DGG) strategy. The DGG strategy partitions
the hyperboxes with the same largest crowding de-
gree into fine granularity hyperboxes to more pre-
cisely locate the position of the nondominated solu-
tions, which can avoid randomness for selecting hy-
perboxes and individual solutions in the single grid
structure.
To verify the effectiveness of DGG strategy, we
first integrated it into two algorithms based on the
single-layer grid structure to generate two new inte-
gration algorithms. Then tested the two new inte-
grated algorithms by comparing them with the orig-
inal algorithm and four other EMO algorithms.
The rest of this paper is organized as follows.
Section 2 briefly introduces basic concepts involving
MOPs. Section 3 is devoted to describing the details
of the proposed method. Next, Section 4 presents the
experimental design and results. Section 5 concludes
this paper and outlines future research directions.
2 BASIC CONCEPTS
Without loss of generality, a MOP may be stated as
a minimization problem and defined as follows (Deb,
2001):
min y = F(x) = ( f
1
(x), f
2
(x),· ·· , f
m
(x))
T
s.t. g
i
(x) ≤ 0,i = 1,2, ··· , p
h
j
(x) = 0, j = 1,2, ·· · ,q
x
L
i
≤ x
i
≤ x
U
i
(1)
where x = (x
1
,x
2
,·· · ,x
n
) ∈ X ⊂ R
n
is a n-dimensional
decision vector, X represents a n-dimensional deci-
sion space, x
L
i
and x
U
i
are the upper and lower bound-
ary values of x
i
, respectively. y = (y
1
,y
2
,·· · ,x
m
) ∈
Y ⊂ R
m
is a m-dimensional objective vector, Y rep-
resents a m-dimensional objective space. F(x) is a
mapping function from n-dimensional decision space
to m-dimensional objective space. g
i
(x) ≤ 0 (i =
1,2,· ·· , p) and h
j
(x) = 0 ( j = 1,2,·· · ,q) defines p
inequalities and q equalities, respectively.
In the following, we will list four definitions in-
volving MOPs.
Definition 1 (Pareto Dominant). x
α
, x
β
are two
feasible solutions, x
α
is Pareto dominant compared
with x
β
if and only if:
∀i = 1,2,· ·· , m, f
i
(x
α
) ≤ f
i
(x
β
) ∧
∃ j = 1, 2,· ·· ,m, f
i
(x
α
) < f
i
(x
β
)
. (2)
We call this relationship x
α
x
β
, x
α
dominate x
β
, or
x
β
is dominated by x
α
.
Definition 2 (Pareto Optimal Solution). Ω is the
feasible solution set, x
∗
∈ Ω, x
∗
is a Pareto optimal
solution if and only if:
¬∃x ∈ Ω : x x
∗
. (3)
Definition 3 (Pareto Optimal Set). The Pareto
optimal set includes all the Pareto optimal solutions
and is given as follows:
X
∗
= {x
∗
|¬∃x ∈ Ω : x x
∗
}. (4)
Definition 4 (Pareto Front). The Pareto front
(noted as PF) includes all the objective vectors cor-
responding to X
∗
and is given as follows:
PF ={F(x
∗
)= ( f
1
(x
∗
), f
2
(x
∗
),· ·· , f
m
(x
∗
))
T
|x
∗
∈X
∗
}.
(5)
For better distinction, we present the true PF and the
PF obtained by an algorithm as PF
true
and PF
approx
respectively.
3 DOUBLE GRANULARITY GRID
(DGG) STRATEGY
Usually, the EMO algorithms set in two populations:
an internal population and an external population
(also called archive set (EA)). The internal population
executes optimization mechanisms, and the external
population preserves the nondominated solutions ob-
tained in the optimization process. When the size of
EA exceeds the specified quantity, the DGG strategy
is used to remove redundant solutions and maintain
the diversity of nondominated solutions. As shown
in the Strategy 1, implementation of this strategy in-
cludes the following two steps.
Step 1) Coarse Granularity Grid Partition.
The objective space region is divided into coarse
granularity that EA occupies into hyperboxes, and
div1 represents the number of first partition for each
dimensional objective space. At the same time, some
relevante information, including the lower and upper
boundaries of the grid, the width and grid coordinate
A New Diversity Maintenance Strategy based on the Double Granularity Grid for Multiobjective Optimization
89
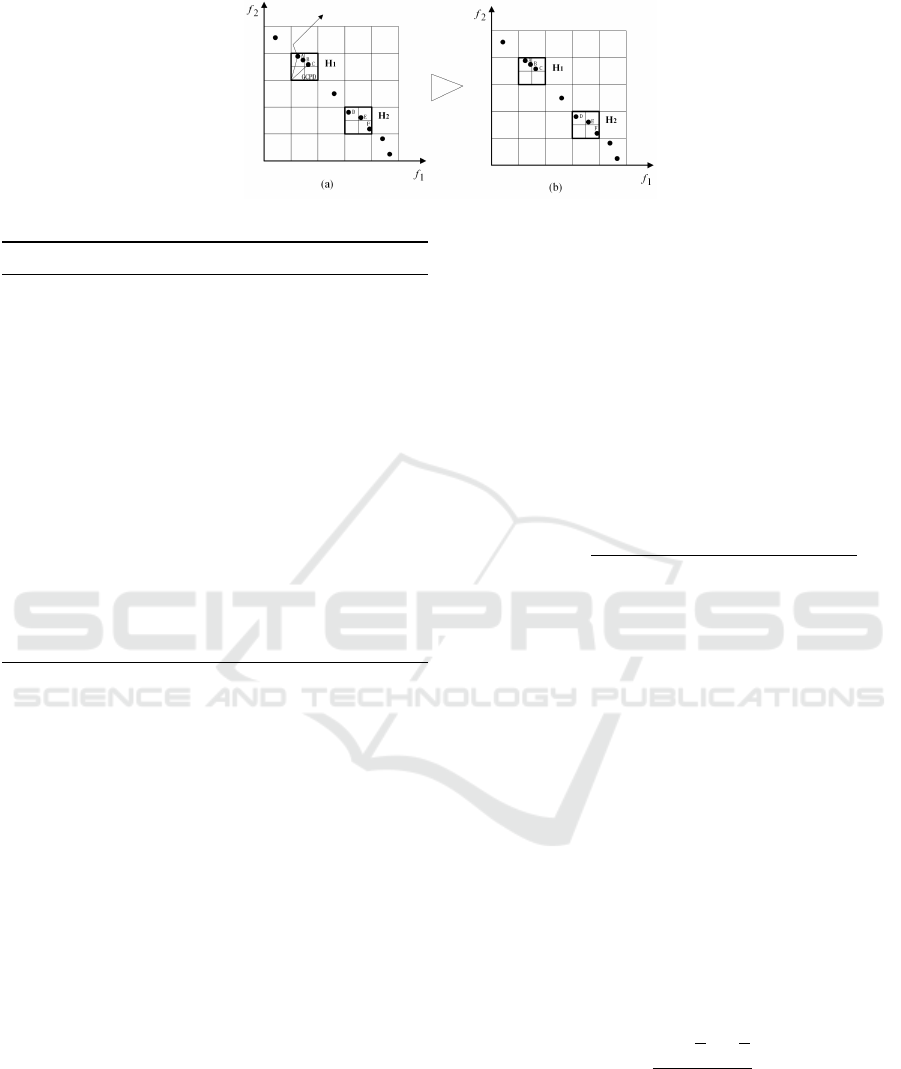
Figure 1: Schematic diagram of the double granularity grid strategy.
Strategy 1: Double Granularity Grid Strategy.
1 while EA exceeding specified quantity
2 Make a coarse granularity partition on the objective
space region that EA occupy.
3 i) If only one coarse hyperbox has the highest crowding
degree (denoted by δ)
4 • Compute the GCPD of each individual in this
coarse hyperbox as Eq.(10);
5 • Remove the individual with the largest value of
GCPD.
6 ii) If more than one coarse hyperbox have the same δ
7 • Make a fine granularity partition on the coarse
hyperboxes;
8 • Calculate the E of these coarse hyperboxes based
on the δ of fine hyperboxes as Eq.(11);
9 • Select the coarse hyperbox with the smallest
value of E;
10 • Remove the individual with the largest value of
GCPD in the selected coarse hyperbox.
11 end while
of each dimensional objective for each coarse granu-
larity hyperbox, is provided. Each individual solution
in EA has an exact position in a coarse granularity
hyperbox. Each coarse granularity hyperbox has a
crowding degree attribute denoted by δ, which rep-
resents the total number of individual solutions con-
tained in this coarse granularity hyperbox. In ad-
dition, each coarse granularity hyperbox has a m-
dimensional grid coordinate, and its kth grid coordi-
nate is defined as follows.
For the kth objective, the lower and upper bound-
aries of the grid are determined according to the fol-
lowing formula:
lb
k
=min
k
(EA)−(max
k
(EA)−min
k
(EA))/(2 ∗ div1) (6)
ub
k
=max
k
(EA)+(max
k
(EA)−min
k
(EA))/(2∗div1) (7)
where max
k
(EA) and min
k
(EA) stand for the minimal
and maximal values in the kth objective, respectively.
The coarse granularity hyperbox width in the kth
objective can be formed as:
d
k
= (ub
k
− lb
k
)/div1 (8)
The grid coordinates of an individual on the kth
objective is defined as:
G
k
(x) = f loor(( f
k
(x) − lb
k
)/d
k
) (9)
where f
k
(x) is the actual kth objective value.
Step 2) Fine Granularity Grid Partition. When
the EA exceeds the specified size, the individual in
coarse granularity hyperbox with maximum crowd-
ing degree is continuously reduced one by one until
the capacity of EA reaches the specified number. If
only one coarse granularity hyperbox has the maxi-
mum crowding degree, calculate the grid coordinate
point distance (GCPD) for each individual in the hy-
perbox, and then select the individual with the highest
GCPD value to delete. Here GCPD is a useful criteria
to discriminate individuals in the same hyberbox, and
is defined as (Yang et al., 2013):
GCPD(x)=
s
m
∑
k=1
(( f
k
(x)−(lb
k
+G
k
(x) ∗ d
k
))/d
k
)
2
(10)
where m is the number of objectives.
There is another situation where multiple coarse
granularity hyperboxes have the same maximum
crowding degree. In this case, first divide those coarse
granularity hyperboxes further with partition number
div2 and calculate the crowding degree of each fine
granularity hyperbox. Then, according to the crowd-
ing degree of fine granularity hyperboxes, calculate
the evenness index of the corresponding coarse gran-
ularity hyperbox and choose the coarse granularity
hyperbox with the smallest evenness index. At last,
compute the GCPD value of all the individual so-
lutions in the selected coarse granularity hyperbox
and remove the one with largest value of GDPD. The
evenness index is diffusely used to measure the even-
ness of individual solutions distribution in a popula-
tion and is defined as (E. Elejalde and Bollen, 2018):
E =
−
C
∑
i=1
n
i
N
∗ ln
n
i
N
lnC
(11)
where C is the number of fine granularity hyperboxes
in the coarse granularity hyperbox, and C = (div2)
m
,
N is the crowding degree of the coarse granularity hy-
perbox, n
i
is the crowding degree of the fine granular-
ity hyperbox i.
From the above can be obtained, compared with
the single-layer grid structure, the proposed DGG
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
90

Table 1: Comparison results of PESA-II and PESA-II+DGG on the UF suit.
Problems
IGD HV
PESA-II PESA-II+DGG PESA-II PESA-II+DGG
UF1
1.6746E−1(5.26E−2) 1.5827E−1(4.77E−2) 5.3944E−1(4.43E−2) 5.5198E−1(4.77E−2)
UF2
8.1915E−2(2.28E−2) 7.5380E−2(2.44E−2) 6.3582E−1(1.35E−2) 6.3947E−1(1.69E−2)
UF3
3.0906E−1(3.65E−2) 3.0581E−1(3.72E−2) 3.9149E−1(4.26E−2) 3.9866E−1(3.00E−2)
UF4
5.4234E−2(2.42E−3) 5.3642E−2(1.29E−3) 3.6967E−1(3.89E−3) 3.6973E−1(2.41E−3)
UF5
9.3133E−1(2.42E−1) 8.6005E−1(2.01E−1) 4.1482E−3(1.25E−2) 4.8915E−3(1.20E−2)
UF6
3.4004E−1(1.30E−1) 3.2328E−1(1.26E−1) 2.3587E−1(6.43E−2) 2.4043E−1(6.96E−2)
UF7
3.1960E−1(1.52E−1) 2.9626E−1(1.93E−1) 3.2372E−1(9.32E−2) 3.4040E−1(1.19E−1)
Table 2: Comparison results of PESA-II and PESA-II+DGG on the DTLZ suit.
Problems
IGD HV
PESA-II PESA-II+DGG PESA-II PESA-II+DGG
DTLZ1
2.8645E−2(5.00E−2) 1.9636E−2(1.59E−2) 8.0912E−1(1.17E−1) 8.2774E−1(7.97E−3)
DTLZ2
5.7137E−2(7.95E−3) 5.6004E−2(6.27E−3) 5.4325E−1(7.99E−3) 5.4030E−1(7.32E−3)
DTLZ3
1.4474E+0(1.41E+0) 1.3363E+0(1.20E+0) 1.5604E−1(2.28E−1) 1.5676E−1(2.40E−1)
DTLZ4
5.4250E−2(3.53E−3) 5.2816E−2(3.13E−3) 5.4765E−1(8.46E−3) 5.4795E−1(6.81E−3)
DTLZ5
4.4671E−3(3.92E−4) 4.3857E−3(2.79E−4) 1.9874E−1(2.06E−3) 1.9916E−1(9.33E−4)
DTLZ6
5.0470E−3(3.08E−4) 4.9680E−3(2.52E−4) 1.9827E−1(2.05E−3) 1.9831E−1(1.98E−3)
DTLZ7
5.4475E−2(5.61E−2) 4.4917E−2(1.74E−3) 2.7794E−1(7.08E−3) 2.7853E−1(2.78E−3)
strategy has two differences. On the one hand, when
there are multiple coarse granularity hyperboxes with
largest crowding degree, they are further divided into
fine granularity hyperboxes. On the other hand,
GCPD is used as the basis for individual selection.
Therefore, the DGG strategy enhances the resolution
of the hyperbox, avoids the randomness of the hyper-
box and solution selection, and enables the distribu-
tion of nondominated solutions more uniform.
For clarity, Fig.1 shows a simple two-dimensional
example. Fig.1 (a) gives an EA that holds all non-
dominated solutions, the number of solutions which
exceed the maximum capacity of the EA is 1. Thus,
the DGG strategy is used to eliminate one redundant
solution. Firstly, divide the objective space of the EA
to get coarse granularity hyperboxes with the partition
number of 5, and find the coarse granularity hyperbox
with the largest crowding degree. As shown in Fig.1
(a), H
1
and H
2
are the two coarse granularity hyper-
boxes with biggest crowding degree, which consists
of three individuals. Secondly, a fine granularity par-
tition in H
1
and H
2
for fine granularity hyperbox, the
number of partitions is 2 and calculate the evenness
of H
1
and H
2
, select the H
1
with smaller evenness
according to Eq.(10). Finally, compute the GCDP of
individual A, B and C in the coarse granularity hyper-
box H
1
according to Eq.(11), choose the individual A
with the largest value and remove it from the EA, and
obtain the final nondominated solution set as shown
in Fig.1(b).
4 EXPERIMENTS
In this section, extensive experiments have veri-
fied the performance of the proposed DGG strat-
egy. The experimental platform is a PC with In-
tel(R) Core(TM) i5-4590 CPU 3.30GHz, 8GB RAM,
and Windows 10, and DGG is implemented using the
Matlab language.
4.1 Experimental Setting
Two well-defined test suites, the UF (Huband et al.,
2005) and DTLZ (K. Deb and Zitzler, 2005), are se-
lected in this paper. UF1-UF7 are bi-objective test
problems, and DTLZ1-DTLZ7 are tri-objective test
problems to further examine the performance of the
DGG strategy in handling MOPs with more than two
objectives. We chose two evaluation metrics: the
inverted generational distance(IGD) (Bosman and
Thierens, 2003) and hypervolume (HV) (Z. Eckart
and Lothar, 2008), which can check convergence and
diversity simultaneously.
Let S
∗
be a set of uniformly distributed solutions
along PF
true
and S be the set of obtained solutions
along PF
approx
. IGD measures the average distance
from S
∗
to S and is defined as follows:
IGD(S, S
∗
) =
1
|S
∗
|
∑
x
∗
∈S
∗
d(x
∗
,S) (12)
where d(x
∗
,S) is the Euclidean distance between the
solution x
∗
and its nearest point in S, and |S
∗
| is
A New Diversity Maintenance Strategy based on the Double Granularity Grid for Multiobjective Optimization
91
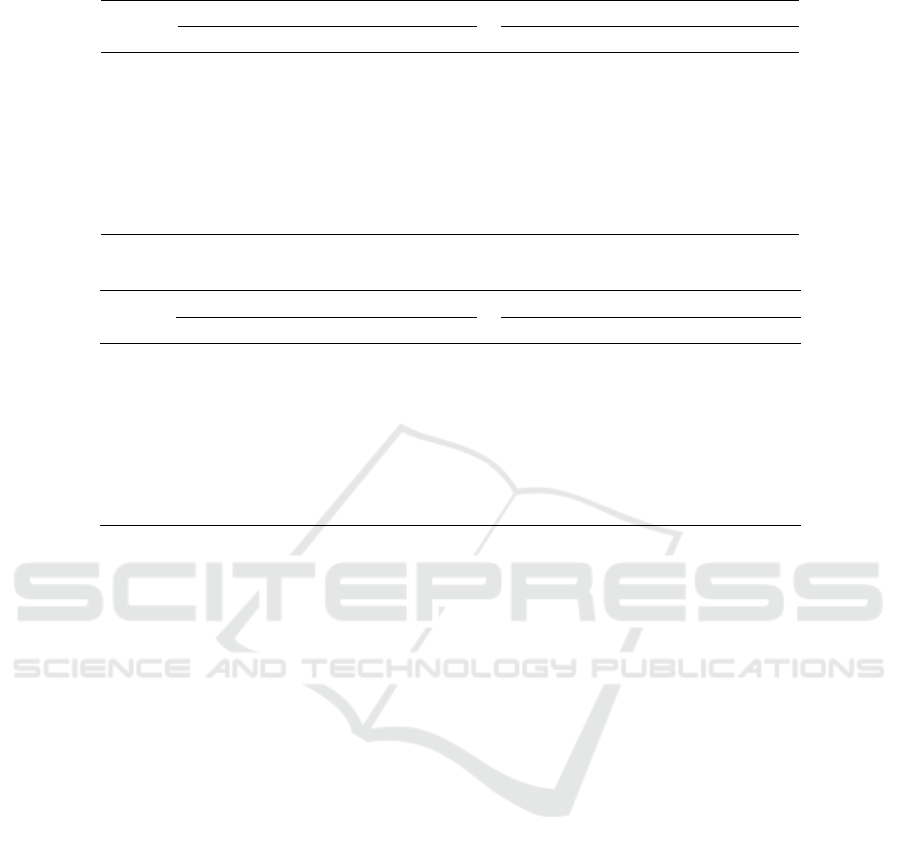
Table 3: Comparison results of MOPSO and MOPSO+DGG on the UF suit.
Problems
IGD HV
MOPSO MOPSO+DGG MOPSO MOPSO+DGG
UF1
5.8264E−1(1.19E−1) 5.3610E−1(1.11E−1) 1.2827E−1(6.42E−2) 1.6000E−1(6.18E−2)
UF2
1.0720E−1(1.15E−2) 1.0297E−1(1.55E−2) 5.9727E−1(1.27E−2) 6.0335E−1(1.39E−2)
UF3
5.3750E−1(2.50E−2) 5.2532E−1(2.52E−2) 1.3988E−1(2.02E−2) 1.4386E−1(2.01E−2)
UF4
9.3645E−2(1.05E−2) 8.8813E−2(6.96E−3) 3.1497E−1(1.20E−2) 3.1747E−1(1.14E−2)
UF5
3.3849E+0(3.17E−1) 3.3509E+0(3.12E−1) 0.0000E+0(0.00E+0) 0.0000E+0(0.00E+0)
UF6
2.7668E+0(4.94E−1) 2.6966E+0(5.77E−1) 0.0000E+0(0.00E+0) 0.0000E+0(0.00E+0)
UF7
6.6809E−1(1.11E−1) 6.1686E−1(9.34E−2) 3.3508E−2(3.03E−2) 4.4364E−2(4.64E−2)
Table 4: Comparison results of MOPSO and MOPSO+DGG on the DTLZ suit.
Problems
IGD HV
MOPSO MOPSO+DGG MOPSO MOPSO+DGG
DTLZ1
4.9920E+0(2.11E+0) 3.9530E+0(1.24E+0) 0.0000E+(0.00E+0) 0.0000E+(0.00E+0)
DTLZ2
2.0996E−1(4.25E−2) 2.0033E−1(5.16E−2) 3.6641E−1(2.78E−2) 3.7842E−1(3.15E−2)
DTLZ3
7.2673E+1(4.89E+1) 5.9949E+1(4.38E+1) 0.0000E+0(0.00E+0) 1.8080E−3(9.90E−3)
DTLZ4
2.3055E−1(1.08E−1) 2.2383E−1(5.57E−2) 4.5579E−1(3.74E−2) 4.6480E−1(3.91E−2)
DTLZ5
4.1721E−3(4.62E−4) 6.5022E−3(2.12E−4) 1.9916E−1(6.34E−4) 1.9802E−1(2.06E−4)
DTLZ6
2.6758E+0(1.44E+0) 2.5944E+0(1.04E+0) 1.9695E−2(6.01E−2) 1.9809E−2(3.62E−2)
DTLZ7
6.0958E+0(1.87E+0) 5.7735E+0(1.54E+0) 0.0000E+(0.00E+0) 0.0000E+(0.00E+0)
the size of the set S
∗
. In general, a lower value
of IGD(S,S
∗
) indicates that S more evenly covers
PF
approx
and is closer to PF
true
.
Let z
r
= (z
r
1
,z
r
2
,.. .,z
r
m
)
T
be a reference point in
the objective space that is dominated by all Pareto op-
timal objective vectors. Let S be the obtained approx-
imation set (i.e., PF
approx
) of PF
true
in the objective
space. HV measures the volume of the region dom-
inated by S and bounded by z
r
) and a larger value is
preferable, it’s defined as:
HV (S) = volume
[
x∈S
[x
1
,z
r
1
] × ... × [x
m
,z
r
m
]
!
(13)
To verify the proposed DGG strategy, we inte-
grate DGG strategy into two classical EMO algo-
rithms based on the single-layer grid structure PESA-
II and MOPSO, which results in two new algorithms,
denoted by PESA-II+DGG and MOPSO+DGG, re-
spectively. Firstly, we separately compare the two
new algorithms with their corresponding original ver-
sions. Thereafter, we select one of the new algo-
rithms and compare it with the other four state-of-the-
art EMO algorithms to further demonstrate the effec-
tiveness of the proposed method.
The number of coarse granularity grid division
div1 in two new algorithms was set as 32 and 30,
which was consistent with the number of grid in the
original algorithm, and the quantity of fine grid divi-
sion div2 is set as 2, the population and EA size were
set to 100. All the results presented in this paper are
obtained by executing 30 independent runs of each
algorithm on each test problem with the termination
criterion of 50,000 evaluations. For the other parame-
ters in all algorithms, we tried to use identical settings
as suggested in original studies.
4.2 Original Algorithm vs Original
Algorithm+DGG
Table 1 and Table 2 show the comparative results of
the PESA-II and PESA-II+DGG on the UF and DTLZ
test suites regrading the mean and standard deviation
values, with respect to the two metrics IGD and HV.
The best average result with respect to each metric are
show in bold. As can be seen from Table 1 and Ta-
ble 2 that whether IGD metric or HV metric, PESA-
II+DGG plays best on all the 14 test instances, repre-
sents a better performance than PESA-II.
The experimental results of MOPSO and
MOPSO+DGG are listed in Table 3 and Table 4.
As shown in Table3, MOPSO+DGG achieves best
values for all UF test problems in addition to the
HV metric value on UF5 and UF6, and neither
algorithms converge on UF5 and UF6. About the
IGD metric on the DTLZ test suite, MOPSO+DGG
plays best on six out of seven test problems except
the DTLZ5. Regarding HV metric, MOPSO+DGG
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
92
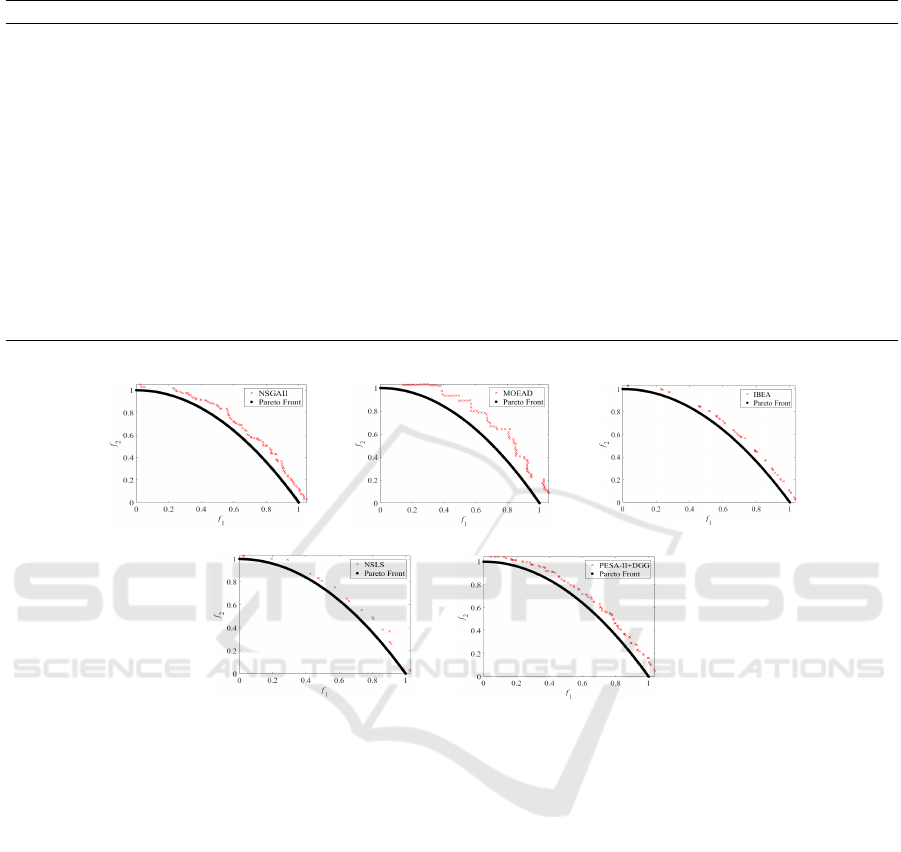
Table 5: Comparison results of the five algorithms on the UF and DTLZ test suites in term of IGD.
Problems NSGA-II MOED/D IBEA NSLS PESA-II+DGG
UF1
1.6537E−1(5.62E−2) 2.7100E−1(1.00E−1) 1.6278E−1(4.88E−2) 2.5520E−1(2.76E−2) 1.5827E−1(4.77E−2)
UF2
6.1831E−2(2.01E−2) 1.7084E−1(8.07E−2) 6.2608E−2(1.71E−2) 5.5395E−1(3.79E−2) 7.5380E−2(2.44E−2)
UF3
2.9459E−1(4.59E−2) 3.2462E−1(2.43E−2) 2.8530E−1(4.68E−2) 3.8590E−1(2.52E−3) 3.0581E−1(3.72E−2)
UF4
5.4031E−2(2.52E−3) 8.3697E−2(3.74E−3) 5.8447E−2(4.15E−3) 7.0373E−2(5.45E−3) 5.3647E−2(1.29E−3)
UF5
7.5661E−1(1.86E−1) 5.9337E−1(1.28E−1) 6.4726E−1(1.75E−1) 1.9925E+0(1.23E−1) 8.6005E−1(2.01E−1)
UF6
3.3181E−1(1.33E−1) 4.7767E−1(2.41E−1) 3.5317E−1(2.18E−1) 1.0892E+0(7.78E−2) 3.2328E−1(1.26E−1)
UF7
2.4500E−1(1.54E−1) 4.1291E−1(1.65E−1) 1.9426E−1(1.53E−1) 2.7945E−1(2.31E−2) 2.9626E−1(1.93E−1)
DTLZ1
3.1601E−1(2.30E−1) 2.0636E−2(7.14E−5) 1.6766E−1(1.00E−1) 2.9003E+1(3.10E+0) 1.9636E−2(1.59E−3)
DTLZ2
6.9104E−2(2.03E−3) 5.4464E−2(4.63E−7) 8.1858E−2(2.11E−3) 4.1622E−1(5.14E−2) 5.6004E−2(6.27E−3)
DTLZ3
3.1061E+0(1.93E+0) 5.9815E−2(4.36E−3) 2.7884E+0(2.41E+0) 1.6674E+2(141E+1) 1.3363E+0(1.20E+0)
DTLZ4
9.8091E−2(1.60E−1) 2.1377E−1(2.57E−1) 1.0997E−1(1.58E−1) 6.0497E−1(6.17E−2) 5.2816E−2(3.13E−3)
DTLZ5
5.6405E−3(3.15E−4) 3.3865E−2(3.13E−5) 1.6502E−2(1.69E−3) 3.7154E−1(5.20E−2) 4.3857E−3(2.79E−4)
DTLZ6
6.0003E−3(2.96E−4) 3.3911E−2(8.69E−6) 1.8060E−2(2.37E−3) 2.1798E−1(8.01E−2) 4.9680E−3(2.52E−4)
DTLZ7
8.5549E−2(4.99E−2) 1.9806E−1(1.64E−1) 9.7567E−2(7.63E−2) 5.0053E−1(6.03E−2) 4.4917E−2(1.74E−3)
(a) (b) (c)
(d) (e)
Figure 2: Approximations of PF
true
found by different algorithms on UF4: (a) NSGA-II, (b) MOEA/D, (c) IBEA, (d) NSLS
and (e) PESA-II+DGG.
produces the best results on four out of seven test
problems: DTLZ2, DTLZ3, DTLZ4 and DTLZ6 and
both MOPSO+DGG and MOPSO failed to converge
effectively on DTLZ1 and DTLZ7 test problems.
4.3 Comparisons with State-of-the-Art
Algorithms
To further demonstrate the performance of the pro-
posed strategy, we choose one integration algorithm
PESA-II+DGG to compare with four state-of-the-art
algorithms. Tables 5 gives the results of all the al-
gorithms on the UF and DTLZ test suites in terms
of IGD metric. Regarding UF test suite, PESA-
II+DGG plays best on three out of seven test prob-
lems: UF1, UF4 and UF6. IBEA attains the best
results on UF3 and UF7 while NSGA-II obtains the
best results on UF2 and MOEA/D achieves a bet-
ter value on UF5. Concerning the DTLZ test suite,
PESA-II+DGG strategy gets the best performance
on all the test problems except DTLZ2 and DTLZ3,
while MOEA/D yields the best results on DTLZ1 and
DTLZ3.
Table 6 shows the results in terms of HV on the
two test suites. About the UF test suite, PESA-
II+DGG strategy produces the best results on three
test problems: UF1, UF4 and UF6, with MOEA/D on
UF5, and with NSGA-II performs best on UF2, UF3
and UF7. For the DTLZ test suite, PESA-II+DGG
strategy performs best in three test problems includ-
ing DTLZ4, DTLZ5 and DTLZ7. MOEA/D gets the
best values on DTLZ1, DTLZ2 and DTLZ3, while
NSGA-II obtains the best results on DTLZ6.
To intuitively illustrate the results of different al-
gorithms, we plot their final PF
approx
on UF4 and
A New Diversity Maintenance Strategy based on the Double Granularity Grid for Multiobjective Optimization
93
Table 6: Comparison results of the five algorithms on the UF and DTLZ test suites in term of HV .
Problems NSGA-II MOEA/D IBEA NSLS PESA-II+DGG
UF1
5.4521E−1(9.40E−2) 4.6001E−1(6.06E−2) 5.4568E−1(5.59E−2) 3.5544E−1(3.81E−2) 5.5198E−1(4.77E−2)
UF2
7.9102E−1(1.21E−2) 6.0930E−1(3.98E−2) 6.5537E−1(1.09E−2) 9.4796E−2(2.32E−2) 6.3947E−1(1.69E−2)
UF3
4.0706E−1(5.76E−2) 3.6294E−1(2.68E−2) 3.9449E−1(2.40E−2) 1.8994E−1(8.22E−3) 3.9866E−1(3.00E−2)
UF4
3.6256E−1(1.67E−2) 3.2340E−1(4.38E−3) 3.6811E−1(3.73E−3) 3.5117E−1(4.91E−3) 3.6973E−1(2.41E−3)
UF5
1.1454E−2(2.23E−2) 8.1769E−2(6.80E−2) 3.6548E−2(4.78E−2) 0.0000E+0(0.00E+0) 4.8915E−3(1.20E−2)
UF6
2.3175E−1(1.10E−1) 1.8840E−1(9.45E−2) 2.3286E−1(8.07E−2) 0.0000E+0(0.00E+0) 2.4.43E−1(6.96E−2)
UF7
4.4303E−1(1.19E−1) 2.6239E−1(1.06E−1) 4.0917E−1(1.01E−1) 1.6539E−1(3.51E−2) 3.4010E−1(1.19E−1)
DTLZ1
2.9097E−1(3.32E−1) 8.4082E−1(7.12E−4) 5.3077E−1(2.09E−1) 0.0000E+0(0.00E+0) 8.2774E−1(7.97E−3)
DTLZ2
5.3650E−1(3.53E−3) 5.5960E−1(6.44E−6) 5.5744E−1(1.19E−3) 4.6034E−2(3.80E−2) 5.4030E−1(7.32E−3)
DTLZ3
9.5069E−3(5.21E−2) 5.3461E−1(1.37E−2) 7.4213E−3(4.06E−2) 0.0000E+0(0.00E+0) 1.5676E−1(2.40E−1)
DTLZ4
5.2098E−1(8.15E−2) 4.8533E−1(1.23E−1) 5.4225E−1(8.53E−2) 0.0000E+0(0.00E+0) 5.4795E−1(6.81E−3)
DTLZ5
1.9853E−1(1.41E−4) 1.8188E−1(1.32E−5) 1.9869E−1(3.04E−4) 2.8943E−3(5.18E−3) 1.9916E−1(9.33E−4)
DTLZ6
1.9935E−1(1.43E−4) 1.8185E−1(4.19E−6) 1.9821E−1(4.39E−4) 1.2118E−1(1.77E−2) 1.9831E−1(1.98E−3)
DTLZ7
2.6915E−1(5.84E−3) 2.5216E−1(1.35E−2) 2.7431E−1(1.00E−2) 1.2069E−1(2.26E−2) 2.7853E−1(2.78E−3)
(a) (b) (c)
(d) (e)
Figure 3: Approximations of PF
true
found by different algorithms on UF4: (a) NSGA-II, (b) MOEA/D, (c) IBEA, (d) NSLS
and (e) PESA-II+DGG.
DTLZ1 test problems, in Fig. 2 and Fig. 3, respec-
tively. As can be seen from Fig. 2, the PF
approx
of
MOPSO-DGG is very close to the PF
true
and the
obtained nondominated solutions are uniformly dis-
tributed on PF
approx
, and the other four algorithms fail
to cover the PF
true
.
5 CONCLUSIONS
The diversity of nondominated solutions is a momen-
tous goal of evolutionary and swarm intelligence al-
gorithms for solving MOPs. The grid strategy is an
effective diversity maintenance strategy of nondomi-
nated solutions. However, the existing grid strategy
based on single-layer grid structure can not judge the
diversity of nondominated solutions in multiple hy-
perboxes with the same crowding degree. In this pa-
per, we proposed a new diversity maintainance strat-
egy based on the double granularity grid (DGG),
which obtains the more evenly distribution of non-
dominated solutions by dividing double granularity
grid. To demonstrate the performance of DGG strat-
egy, we integrated it with two popular algorithms
based on single-layer grid and compared it with four
state-of-the-art algorithms. The experimental results
show that the proposed DGG strategy is effective and
has great potential for maintaining the diversity of
nondominated solutions on MOPs problems.
In the future, we will further study the grid strat-
egy and develop a more effective diversity mainte-
nance strategy. Since the results of the proposed strat-
egy in many-objective optimization problem are not
very ideal, we also want to extend this strategy to the
many-objective optimization problem in the next step.
ICPRAM 2020 - 9th International Conference on Pattern Recognition Applications and Methods
94

ACKNOWLEDGEMENTS
This work is partly supported by the NSFC
Research Program (61672065, 61906010), Bei-
jing Municipal Education Research Plan Project
(KM202010005032), China Postdoctoral Science
Foundation funded project (71007011201801), Bei-
jing Postdoctoral Research Foundation (2017-ZZ-
024), and Chaoyang Postdoctoral Research Founda-
tion (2018ZZ-01-05).
REFERENCES
Aimin Zhou, Bo-Yang Qu, H. L. S.-Z. Z. and Zhang, Q.
(2011). Multiobjective evolutionary algorithms: A
survey of the state of the art. Swarm and Evolutionary
Computation, volume 1, pages 32–49.
Bili Chen, Wenhua Zeng, Y. L. and Zhang, D. (2015).
A new local search-based multiobjective optimization
algorithm. IEEE Transactions on Evolutionary Com-
putation, volume 19, pages 50–73.
Bosman, P. and Thierens, D. (2003). The balance between
proximity and diversity in multiobjective evolutionary
algorithms. IEEE Transactions on Evolutionary Com-
putation, volume 7, pages 174–188.
Coello, C. A., Pulido, G. T., and Lechuga, M. S. (2004).
Handling multiple objectives with particle swarm op-
timization. IEEE Transactions on Evolutionary Com-
putation, volume 8, pages 256–279.
Corne, D., Knowles, J., and Oates, M. (2000). The pareto-
envelope based selection algorithm for multiobjective
optimization. InInternational Conference on Parallel
Problem Solving from Nature, pages 869–878.
Corne D W, Jerram N R, K. J. D. e. a. (2001). PESA-II:
Region-based selection in evolutionary multiobjective
optimization. In GECCO’2001’ Proceedings of the
Genetic and Evolutionary Computation Conference,
pages 283–290.
Deb (2001). Multi-objective Optimization using Evoulu-
tionary Algorithms. Chichester, john wiley & sons
edition.
Deb (2014). Multi-objective Optimization, Search method-
ologies. Springer, Boston,MA.
E. Elejalde, L. Ferres, E. H. and Bollen, J. (2018). Quanti-
fying the ecological diversity and health of online
news. Journal of computational science, volume 27,
pages 218–226.
Eckart, Z. and K
¨
unzli, S. (2004). Indicator-based selection
in multiobjective search. In in Proc. 8th International
Conference on Parallel Problem Solving from Nature
(PPSN VIII), pages 832–842. Springer.
Ge, H., Zhao, M., Sun, L., Wang, Z., Tan, G., Zhang, Q.,
and Chen, C. L. P. (2019). A many-objective evolu-
tionary algorithm with two interacting processes: Cas-
cade clustering and reference point incremental learn-
ing. IEEE Transactions on Evolutionary Computa-
tion, pages 1–1.
Huband, S., Barone, L., While, L., and Hingston, P. (2005).
A scalable multi-objective test problem toolkit. In
Evolutionary Multiobjective Optimization,Springer.
JD, K. and DW, C. (2000). Approximating the non-
dominated front using the pareto archived evoluton
strategy. IEEE Transactions on Evolutionary Com-
putation, volume 8, pages 149–172.
K. Deb, L. Thiele, M. L. and Zitzler, E. (2005). Scal-
able test problems for evolutionary multiobjective op-
timization. IEEE Transactions on Evolutionary Com-
putation, volume 20, pages 105–145. Springer.
K. Deb, A. Samir, P. A. and Meyarivan, T. (2000). A fast
elitist non-dominated sorting genetic algorithm for
multi-objective optimization: NSGA-II. IEEE Trans-
actions on Evolutionary Computation, pages 849–
858. Springer.
Li, M., Yang, S., and Liu, X. (2014). Shift-based den-
sity estimation for pareto-based algorithms in many-
objective optimization. IEEE Transactions on Evolu-
tionary Computation, volume 18, pages 348–365.
Margarita, R. and Coello, C. C. A. (2006). Multi-objective
particle swarm optimizers: A survey of the state-of-
the-art. International journal of computational in-
teligence research, volume 2, pages 287–308.
X. Cai, Z. F. and Zhang, Q. (2017). A conatrained decom-
position approach with grids for evolutionary multi-
objective optimization. IEEE Transactions on Evolu-
tionary Computation, volume 22, pages 564–557.
Yang, Shengxiang, L. M., Xiaohui, L., and Jinhua, Z.
(2013). A grid-based evolutionary algorithm for
many-objective optimization. IEEE Transactions on
Evolutionary Computation, volume 17, pages 721–
736.
Z. Eckart, K. J. and Lothar, T. (2008). Quality assessment
of pareto set approximations. In Evolutionary Mul-
tiobjective Optimization, volume 52, pages 373–404.
Springer.
Zhang, Q. and Li, H. (2007). MOEA/D: A multiobjec-
tive evolutionary algorithm based on decomposition.
In IEEE Transactions on Evolutionary Computation,
volume 11, pages 712–731.
A New Diversity Maintenance Strategy based on the Double Granularity Grid for Multiobjective Optimization
95
