Synthetic Ground Truth for Presegmentation of Known Objects for
Effortless Pose Estimation
Frederik Haarslev
a
, William Kristian Juel
b
, Norbert Kr
¨
uger
c
and Leon Bodenhagen
d
SDU Robotics, Maersk Mc-Kinney Molle Institute, University of Southern Denmark, Campusvej 55, 5230 Odense, Denmark
Keywords:
Synthetic Ground Truth Generation, Object Segmentation, Pose Estimation.
Abstract:
We present a method for generating synthetic ground truth for training segmentation networks for presegment-
ing point clouds in pose estimation problems. Our method replaces global pose estimation algorithms such as
RANSAC which requires manual fine-tuning with a robust CNN, without having to hand-label segmentation
masks for the given object. The data is generated by blending cropped images of the objects with arbitrary
backgrounds. We test the method in two scenarios, and show that networks trained on the generated data
segments the objects with high accuracy, allowing them to be used in a pose estimation pipeline.
1 INTRODUCTION
Pose estimation is an important task in the field of
robotics. It is used in tasks where a robot needs to
manipulate objects in unknown locations such as in
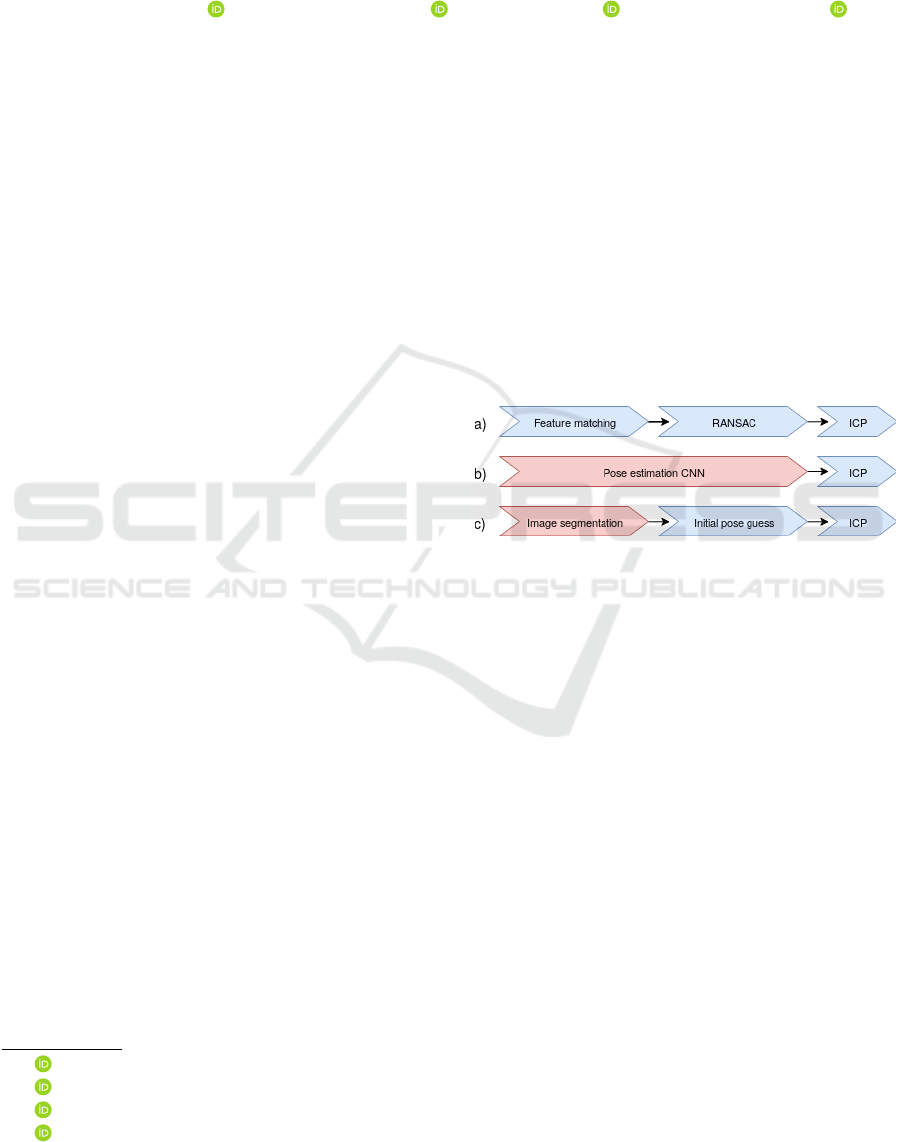
bin picking. Pose estimation is usually solved in three
steps (Figure 1a). First, 3D features in the scene are
found and matched to the model. Then an initial pose
is found with a global method – e.g. feature matching
and RANSAC (Fischler and Bolles, 1981). Lastly, the
initial pose is optimized using a local pose optimizer
– often ICP (Besl and McKay, 1992). This approach
can lead to problems since classic global pose estima-
tors usually require a lot of fine tuning, while often
still resulting in a lot of false positives.
Researchers have started to look towards deep
learning, as a way to mitigate the need for manual
fine-tuning, as neural networks are known to be very
noise resistant. (Xiang et al., 2017; Do et al., 2018)
both have succeeded at replacing the global pose es-
timation pipeline with a single network, which given
a 2D image estimates the 3D bounding boxes and 6D
poses of all known objects in the image (Figure 1b).
These networks are trained end-to-end, meaning that
they train on ground truth where the data consists
of an image, and the annotation is semantic labels,
bounding boxes and poses for all objects. Such data
a
https://orcid.org/0000-0003-2882-0142
b
https://orcid.org/0000-0001-5046-8558
c
https://orcid.org/0000-0002-3931-116X
d
https://orcid.org/0000-0002-8083-0770
Figure 1: Overview of three different approaches to pose
estimation. Blue indicates that the method requires manual
fine tuning and red indicates that it relies on training using
a ground truth.
can be found in publicly available pose estimation
data sets, but it is cumbersome to gather if the object
of interest is not part of such a dataset. Since neu-
ral networks often require thousands of training ex-
amples in order to generalize, it is impractical to hand
label enough training data, every time one faces a new
pose estimation problem.
Another way deep learning can be used to aid pose
estimation, is by only replacing part of the global pose
estimation step. (Wong et al., 2017) uses a seman-
tic image segmentation convolutional neural network
(CNN) for presegmenting the point cloud. This al-
lows the pose to be estimated using an initial pose
guess followed by ICP (Figure 1c). This approach has
the benefit of using a generic segmentation network,
which can easily be changed to newer models once
they are published. The training data is also easier
to collect, as only a segmentation mask is needed for
each image. However, while the annotations are eas-
ier to collect than the pose estimation network coun-
terparts, it is still not practical to create thousands of
segmentation masks whenever one needs to estimate
482
Haarslev, F., Juel, W., Krüger, N. and Bodenhagen, L.
Synthetic Ground Truth for Presegmentation of Known Objects for Effortless Pose Estimation.
DOI: 10.5220/0009163904820489
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 4: VISAPP, pages
482-489
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

(a) (b)
(c) (d)
Figure 2: (a) & (b) Examples of two pose estimation scenar-
ios and (c) & (d) their corresponding synthesized training
data.
Figure 3: The SMOOTH robot docked with the bin used for
use case 1 of the SMOOTH project.
the pose of a new object.
We propose to solve pose estimation by preseg-
menting the point cloud as in (Wong et al., 2017), but
using a network trained on synthetic training data, sig-
nificantly reducing the manual labor required when
estimating the pose of new objects. We exploit the
fact that pose estimation problems are concerned with
specific objects. This means that the network needs to
learn exactly what certain objects looks like, instead
of learning broader context dependent object classes
such as car and chair. In this work, the data is syn-
thesized by blending images of the objects with arbi-
trary backgrounds creating images with no apparent
context (Figure 2). This way the network learns to
ignore the background, and instead focus on the ob-
jects. This process reduces the manual labor when
using deep learning to solve pose estimation of new
objects, from collecting and hand labeling thousands
of images, to taking a few images of the objects from
different angles.
This is motivated by solving one of the three use
cases in the SMOOTH project
1
. In (Juel et al., 2019)
the robot itself and the technical modules required to
solve the three use cases are theorized and described
(Figure 3). In this paper, we focus on the pose es-
timation method used to solve use case 1 which en-
tails the robot platform detecting, docking, and deliv-
ering laundry bins at an elderly care center to ease the
heavy work duty for the caregivers. This solution is
constrained by the rotational and positional error tol-
erances of the algorithm used to dock the laundry bin.
2 RELATED WORK
Deep learning is an increasingly pervasive compo-
nent of modern robotic applications. It is subject to
a lot of ongoing research within using object detec-
tion and semantic segmentation to robustly crop point
clouds of objects, which can be used with the ICP
algorithm, as a replacement for RANSAC that re-
quires tedious manual fine-tuning. Extended research
also replaces the full pipeline used for classic pose
estimation with deep learning methods i.e. learning
poses of the detected objects. A common problem
for all this research is that a lot of training data is re-
quired. Often data is annotated manually, which is
a very time-consuming task and does not scale well
to the industry. Therefore, various methods for syn-
thesizing training data using deep learning methods
and visual simulators (2D and 3D) are common fo-
cus points for researchers working with deep learning
within a pose estimation pipeline. In the following,
selected relevant works are addressed, in particular,
related pose estimation where deep learning is used
within the pipeline (Section 2.1) and synthetic gener-
ation of training data (Section 2.2).
2.1 Deep Learning for Pose Estimation
The research using deep learning within the pose es-
timation pipeline is motivated by the fact that sophis-
ticated robots still struggle to achieve a fast and re-
liable perception of task-relevant objects in uncon-
strained and realistic scenarios. In (Wong et al., 2017)
a method called SegICP is proposed – a method for
object detection and pose estimation. They train a
CNN on 7500 images to do pixel-wise semantic seg-
mentation. They manually label around 5625 objects
while the rest is generated using a motion capture sys-
tem with active markers placed on their cameras and
objects. The output of the segmentation is then used
to crop the point cloud and thereby allowing pose es-
timation using multi-hypothesis ICP.
1
www.smooth-robot.dk
Synthetic Ground Truth for Presegmentation of Known Objects for Effortless Pose Estimation
483

(Xiang et al., 2017) proposes the network
PoseCNN for pose estimation. PoseCNN estimates
the 3D translation of an object by localizing its cen-
ter in the image and predicting its distance from the
camera. The 3D rotation of the object is estimated by
regressing to a quaternion representation.
(Wong et al., 2017; Xiang et al., 2017) replace
parts of or the whole classic pose estimation pipe-line.
The drawback they have in common is how depen-
dent their methods are on training data i.e. annota-
tion on 2D images and collection of poses for the ob-
jects. Creating a data set like this does not scale well
to industry since a lot of manual work labeling and
producing known poses is required, which prevents
its application in real pose estimation tasks, where a
known object is to be detected in an arbitrary scene.
2.2 Synthetic Generation of Data
Different approaches like semi-supervised labeling
(Russell et al., 2008) and gamification (von Ahn
and Dabbish, 2004) have been proposed to ease and
streamline the task of annotating data, but a remaining
problem these approaches leave the user with is the
effort required from humans to manually label or at
least supervise the annotation process. Contemporary,
approaches that use annotated photo-realistic simu-
lated data to train deep neural networks have shown
promising results. In (Johnson-Roberson et al., 2016)
a pipeline to gather data from a visual simulator with
high realism is established and the data is then used
to train deep convolution neural network for object
detection. The trained networks, using only the sim-
ulated data, were capable of achieving high levels of
performance on real-world data. Although this ap-
proach gives attractive results, it is limited by the ver-
satility of the visual simulator since it is not possi-
ble to generate data of objects and environments not
present in it.
Another approach to synthetic ground truth gener-
ation uses Generative Adversarial Networks (GAN’s)
(Goodfellow et al., 2014). One such approach is
GeneSIS-RT introduced in (Stein and Roy, 2018). It is
a procedure for generating high quality, synthetic data
for domain-specific learning tasks, for which anno-
tated training data may not be available. They utilize
the CycleGAN algorithm (Zhu et al., 2017) to learn a
mapping function G
s
between unlabeled real images
and unlabeled simulated images. G
s
is then used to
generate more realistic synthetic training images from
labeled simulated images.
While GANs are able to generate data, they still
need to be trained. For this a manually annotated
ground truth is often required. In the case of GeneSIS-
RT no labels are required for the real and simulated
image sets. However, in order to generate a ground
truth using the method a simulated environment has to
be created. A different method described by (Dwibedi
et al., 2017) requires even less manual labor than the
GAN based methods. They automatically cut ob-
ject instances and paste them on random backgrounds
within the context of the deployment environment.
The generated synthetic data gives competitive per-
formance against real data. This method is proved to
work when the background images are within the con-
text, requiring the user to take images of the relevant
environment that training images can be pasted on.
In this paper, we propose a method where neither
human labor nor an external visual simulator is re-
quired for synthesizing ground truth data. This data
can be used for training a CNN for presegmentation of
point clouds in a pose estimation pipeline. We show
that the method used in (Dwibedi et al., 2017) works
without the use of contextual relevant backgrounds
for the synthesized images and without the use of real
world images during training. We show that the re-
sulting trained CNN can be used as a link in a pose
estimation pipeline. We optimize the CNN so that
it can be deployed on a mobile robot by comparing
different network backbones and input image sizes.
In addition, we show that the developed pose estima-
tion pipeline satisfies the rotational and positional er-
ror tolerances required by the use case.
3 METHODS
In this work we try to solve image segmentation of
specific objects using as little human labour as possi-
ble. This is accomplished by synthesizing the train-
ing data and labels, removing the need to do do any
annotation by hand. The following subsections will
explain how the training data is synthesized, and how
the trained segmentation network is used for estimat-
ing the pose of the object in the scene.
3.1 Generation of Training Data
The flow of the data generation pipeline is shown in
Figure 4. The first step is to take a few images of the
desired objects from different angles and removing
the background. The images have their background
removed automatically by utilizing the depth channel
of the RGB-D camera. By comparing images of the
object in a scene with images of the scene without the
object, the object mask can be determined as the pix-
els which has been changed between the two images.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
484

Figure 4: Flow of training data generation. Images of the object are automatically cropped and blended with an arbitrary
background. Changed pixels are given the object label.
(a) (b) (c)
Figure 5: Three methods for blending an object to the back-
ground: (a) no blending, (b) Gaussian blurring, and (c)
seamless cloning.
The synthetic images are generated by blending
the cropped object images with an arbitrary back-
ground (Figure 4a). In this work the MS COCO (Lin
et al., 2014) dataset has been used for the background
images. First, an object image is generated by picking
one of the cropped images (Figure 4b) and then aug-
menting it (Figure 4c). Such augmentations includes
flipping, scaling, and rotating. The augmented object
is then blended with the background at a random lo-
cation (Figure 4d). As in (Dwibedi et al., 2017), two
different approaches for blending are used: Gaussian
blurring of the object edges, or the seamless clone al-
gorithm described in (P
´
erez et al., 2003). The results
of both methods are compared to not using blending
in Figure 5.
The Gaussian blurring method blends the object
by using a Gaussian filter on the alpha mask of the ob-
ject image. This removes the hard edges between the
object and background by fading the images together.
The seamless clone algorithm minimizes the differ-
ence in the gradient field of the object image and the
desired gradient field of the affected area of the back-
ground image, by solving a set of Poisson equations.
This smooths the transition between the object and
background, by removing any abrupt changes in the
gradient field of the resulting image. Another result of
the Poisson editing is variations in the lighting of the
object, dependent on the background. The seamless
clone algorithm therefore inherently performs data
augmentation, leading to greater variation in the syn-
thetic data.
Once an object has been blended with the back-
ground the segmentation mask can be created as the
pixels which has changed after the blending (fig. 4e).
For each synthetic image N random object images are
blended with the background (fig. 4f). In order to bet-
ter handle cases where the object is not in the image,
a percentage of the synthesized training data contains
only the random background. In this work this per-
centage is set to 5%. As the position of each object
image is random some occlusion of the objects oc-
curs, leading to the trained network being able to han-
dle such occurrences. In (Dwibedi et al., 2017) every
image they synthesize is generated twice, once with
either blending method. I.e. the ground truth con-
tains pairs of images with the same objects blended
at the same locations on the same background, with
the only difference between them being the blend-
ing method. This is stated to help the network ig-
nore learning the blending artifacts, instead learning
the actual shape of the object. We did not find this
to improve the segmentation performance, so instead
the blending method is chosen randomly per object:
I.e., a single synthetic image can contain both blend-
ing methods on different objects.
Another method used by (Dwibedi et al., 2017) is
the inclusion of distractor objects. Distractor objects
Synthetic Ground Truth for Presegmentation of Known Objects for Effortless Pose Estimation
485

(a) (b)
Figure 6: Output of the segmentation network trained on the
grey bin.
(a) (b) (c)
Figure 7: Output of the segmentation network trained on the
green bin (b) without and (c) with the decoy as distractor.
are other objects than the objects of interest which
are labeled as background. This is stated to also help
the network learn to ignore the blending artifacts. We
did not find this to improve the segmentation perfor-
mance, so instead distractor objects are used to miti-
gate false positives, as explained in Section 3.2.
3.2 Training Network
Before the ground truth could be synthesized, 300 im-
ages of the bin are taken using the depth channel to
generate a segmentation mask as well as 100 images
not containing the bin. These were split into a valida-
tion and test set containing 150 object images and 50
background images each. Of the 150 validation ob-
ject images, 100 were cropped with the segmentation
mask and used for synthesizing the training data.
Since only a single object is being learnt, the ca-
pacity of the segmentation network does not need to
be large. Instead the network is chosen based on fast
inference speed and low memory footprint, in order
to optimize the performance on embedded platforms
like mobile robots. Therefore, the BiSeNet (Yu et al.,
2018) real-time segmentation network has been im-
plemented. The network was trained on a ground
truth consisting of 5,000 synthesized images for 10
epochs, using the Adam optimizer with 0.001 as the
initial learning rate. The dataset was balanced by
weighting the loss based on the occurrence of each
class, thereby reducing the effect of the background
class being abundant in the training data.
In order to validate the method, a network was first
trained on the generic grey garbage bin. An example
of the network output can be seen on Figure 6. This
shows that the network is able to learn to segment an
Figure 8: Flow of pose estimation. Point cloud is cropped
using the output of the segmentation network, allowing the
pose to be found using only ICP.
object correctly using our method of synthetic ground
truth generation, and therefore the method was used
with the use case specific green bin. In order to ver-
ify that the network learns to segment the object –
and not just the color green – it was tested on images
containing other objects in the same shade of green
(Figure 7). The network correctly segments the green
circle as background, but mislabels the green rectan-
gle (decoy) which is made to look like the bin. This
is remedied by taking 3 images of the decoy, and then
synthesizing a new ground truth using the decoy as
distractor. This equates to testing the trained network
in the deployment environment, and then taking a few
images of any false positives.
3.3 Estimating Pose
The flow of the pose estimation pipeline is shown in
Figure 8. First step is to capture the 2D scene im-
age and corresponding 3D point cloud. The image
is fed through the trained network to produce a seg-
mentation mask. For RGB-D sensors there is a one-
to-one correspondence between the pixel locations
in the segmentation mask, and the points in the or-
dered point cloud. This allows for the extraction of
all points of the desired class using the segmentation
mask. However, the registration is not perfect, mean-
ing that some bin pixels are registered to 3D locations
in the background. This creates some systematic ar-
tifacts which the network cannot account for, since
it only works with the 2D data. Because of this, all
points further away than some margin (depending on
object size) from the centroid of the segmented point
cloud are also removed.
The pose can now be estimated using an initial
pose guess followed by ICP. In the use case of this pa-
per, the bin is always positioned upright on the floor.
This reduces the pose estimation to 3 Degrees of Free-
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
486

Table 1: Intersection over Union (IoU) results and Frames
Per Second (FPS) of the segmentation network with varying
backbones and input resolution. The mean IoU is calculated
over 5 networks with the same hyper-parameters, and the
standard deviation is indicated with ±.
Backbone Mean IoU FPS
Xception 0.894 ±0.005 41.4
MobileNetV2 0.870 ± 0.026 61.7
DenseNet121 0.872 ± 0.025 41.9
ResNet50 0.804 ± 0.029 40.5
Input resolution Mean IoU FPS
288 × 160 0.855 ± 0.018 141.5
384 × 224 0.847 ± 0.025 95.9
512 × 288 0.870 ± 0.026 61.7
672 × 384 0.827 ± 0.004 41.5
896 × 512 0.779 ± 0.070 24.6
dom (DoF). In addition to this the object is four-way
symmetrical. This means that the object model can
be placed in the centroid of the cropped cloud as the
initial pose guess. Afterwards the pose is found us-
ing a three-fold coarse-to-fine ICP scheme. First the
scene and model clouds are heavily downsampled us-
ing a voxelgrid with leaf size depending on the ob-
ject size and desired speed. Then ICP is used with a
correspondence distance double the leaf size to find
an initial transformation. This is repeated twice us-
ing the previously found transformation as the initial
guess, halving the leaf size and correspondence dis-
tance at each step. The final transformation is then an
estimation of the pose of the model in the scene.
In case of 6-DoF pose estimation problems with
unsymmetrical objects, the multi-hypothesis pose es-
timation scheme presented in (Wong et al., 2017) can
be used. They replace the initial pose guess with mul-
tiple random guesses with the same centroid but ran-
dom rotation. ICP is then used with all guesses, and
the best pose is found using a pose evaluation metric.
4 RESULTS
The first step in creating the pose estimation pipeline
is the training of the segmentation network. It is de-
sired that the network accurately segments the object,
while being lightweight and having a high through-
put. Therefore, various network backbones and input
resolutions are tested. For each backbone 5 networks
are trained on the green bin synthetic ground truth at
512 × 288 input resolution. The trained networks are
used on the test set consisting of 150 images of the bin
labeled using the depth channel, and 50 images with-
out the bin. Many of the test images contain the green
decoy object and other green objects. The Intersection
over Union (IoU) between the segmentation output
and ground truth is calculated. The mean IoU, stan-
dard deviation and Frames Per Second (FPS) is calcu-
lated for the 5 networks using the same backbone, for
every backbone. All backbones are pretrained on Im-
ageNet (Russakovsky et al., 2015). These results can
be seen in Table 1. For further investigation, we de-
cided to continue with the MobileNet (Howard et al.,
2017) implementation due to the high mean IoU and a
significantly higher FPS compared to using the other
backbones. Since this must run on a mobile robot the
computational time is more important than a few per-
cent higher IoU.
Besides the network backbone, the input resolu-
tion was also tested. Similar to before, 5 networks us-
ing the MobileNet backbone are trained for each input
resolution, and the mean IoU, standard deviation and
FPS is calculated (Table 1). One result which stands
out is the networks trained at 896 × 512, which leads
to low mean IoU and high variance. An explanation
for this could be that the pixel quantization hides the
blending artifacts in lower resolution images, leading
to a larger mismatch between the synthetic training
data and real test data at higher resolutions. Similar
to the choice of backbone, the gain in lightweightness
and inference speed when using 288 × 160 images,
outweighs the slight gain in mean IoU when using
512 × 288 images. Therefore, the network chosen for
the pose estimation tests was the network scoring the
highest IoU of the 5 networks with 288 × 160 input
resolution and MobileNet backbone.
The accuracy of the pose estimation pipeline is
tested using a dataset with known ground truth poses.
The ground truth poses are found using detachable
AR markers (Figure 9). The markers needs to be de-
tachable, since they should not be visible when seg-
menting the image. The detachable markers are cal-
ibrated to the center of the bin using two calibration
markers. Each marker aligns with a side of the square
bin, allowing the center to be calculated by finding
the intersection between the pairs of marker planes,
and then averaging them. This transformation is cal-
culated for 250 positions of the bin, after which the
calibration markers are removed.
The test data is made by placing the bin randomly
in a different setting than the one used for capturing
the object images which the network was trained on.
The ground truth pose is then found by averaging the
marker poses over 50 frames. The markers are then
removed and 25 image/point cloud sets are recorded.
This is repeated 150 times with different bin place-
ments resulting in 3750 image/point cloud pairs. A
Synthetic Ground Truth for Presegmentation of Known Objects for Effortless Pose Estimation
487
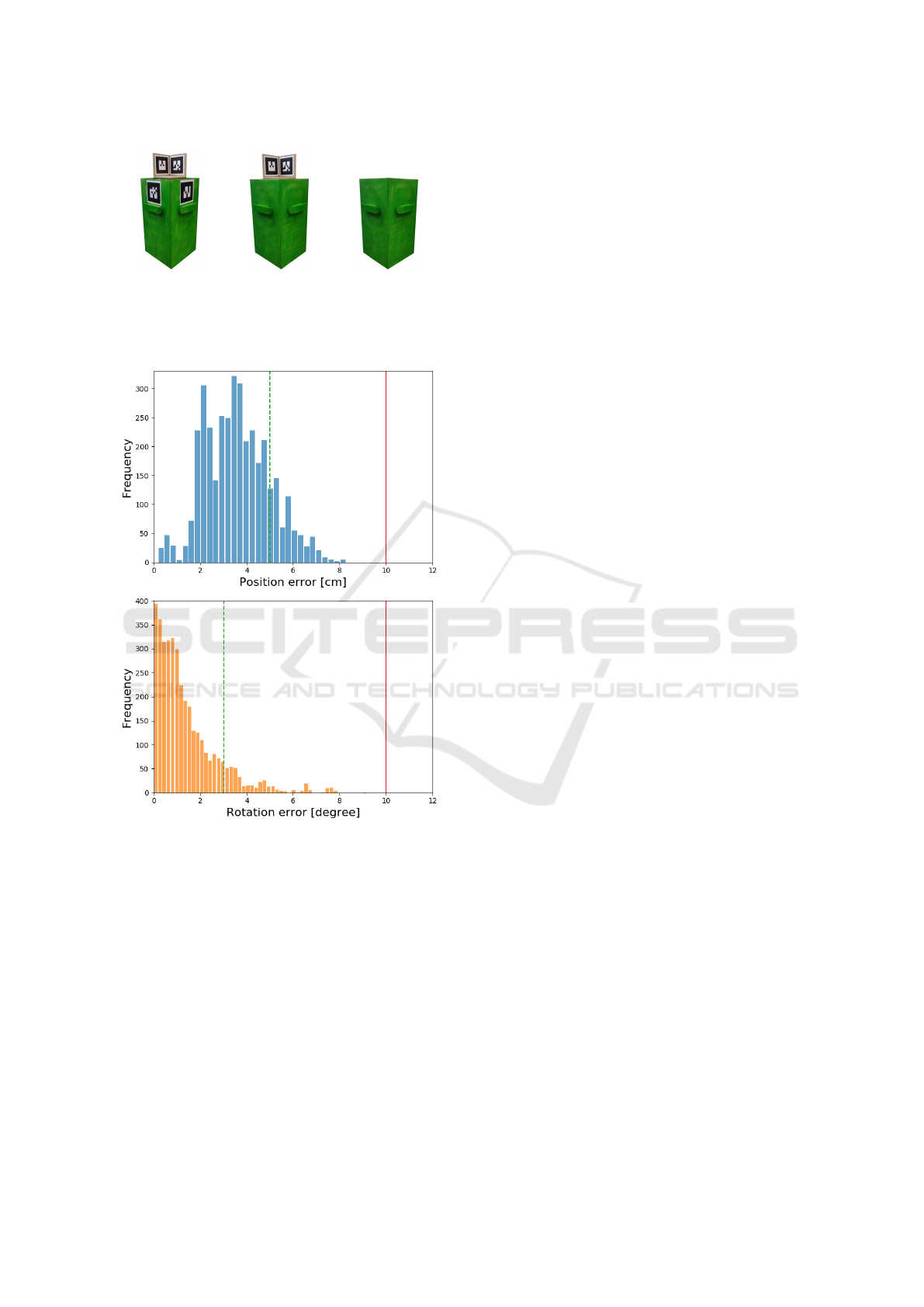
(a) (b) (c)
Figure 9: The markers used for the pose estimation ground
truth. (a) shows the bin with the calibration and detachable
markers, (b) shows the bin with the detachable markers, and
(c) shows the bin with no markers.
Figure 10: Histograms of the position and rotation errors in
the estimated poses on the test set. Errors larger than the red
lines will result in a failed docking, while errors lower than
the green lines always results in a successful docking.
pose is estimated for each pair using the described
pose estimation method.
In the use case the laundry bin is restricted to 3-
DoF. I.e, it is limited to an upright position with the
wheels on the ground so that it can be picked up by the
robot. Therefore, ground truth and estimated poses
are projected to an (x, y) position along the ground
plane, and a θ rotation around the normal vector to
the ground plane. A positional error is calculated as
the L2-norm between the ground truth and estimated
positions, and a rotational error as the difference be-
tween the ground truth and estimated rotations. Be-
cause of the four-way symmetrical property of the
bin, the estimated pose can be rotated 90
◦
or 180
◦
from the ground truth and still be correct. Therefore,
90
◦
is subtracted from the rotation error until it lies
between −45
◦
and 45
◦
, where after the absolute value
is found resulting in a rotation error between 0
◦
and
45
◦
. Before testing the pose estimation accuracy, the
maximum rotational and positional errors which the
docking algorithm used in the use case can handle was
found. This was done by placing the bin with a ran-
dom pose behind the robot, and trying to dock with
it. The test was repeated with various poses in order
to find a threshold where the docking would always
succeed, and a threshold where it would always fail.
Figure 10 shows histograms of the position and rota-
tion errors on the test set. The red lines represents the
errors over which the docking will fail, and the green
lines represents the errors under which the docking is
guaranteed to succeed. Most estimates lies below the
green lines while no estimates lies above the red lines.
It can be seen that the pose estimation has a position
bias of about 2 cm. This could be explained by the un-
certainty in the marker calibration. This is not present
in the rotation errors, since the ground truth rotation
is not calibrated, but instead is the average orienta-
tion of the two detachable markers. Figure 11 shows
results from the segmentation and pose estimation of
both the grey and green bins.
5 CONCLUSION
We present a method to effortlessly solve pose es-
timation of known objects without prior knowledge
about the context of the object, by presegmenting the
point cloud using a segmentation network. The net-
work is trained on a synthetic ground truth, created
by taking a small number of images of the object of
interest. The object images are blended with an ar-
bitrary background from MS COCO. We show that
the method works on two different objects, a generic
garbage bin and a use case specific bin. When the two
objects is placed in a real-world context the output of
the trained segmentation network is robust enough to
crop the point cloud such that it can be used as input
to the ICP algorithm for pose estimation. We train the
network using different backbones and input resolu-
tions, and show how changing the network affects the
intersection over union between the ground truth and
segmentation output.
We test the effect of varying the backbone and in-
put size of the segmentation network, and find that the
best compromise for our use case is using MobileNet
and 288 x 160 image size, since the network is to be
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
488

(a) (b)
(c) (d)
(e) (f)
Figure 11: Outputs of the segmentation networks (left col-
umn) and corresponding estimated poses (right column) in
the scene clouds.
deployed on a mobile platform. We show that the pose
of the object can be estimated using the centroid of the
presegmented cloud as an initial pose guess followed
by ICP, thereby not having to rely on a more sophis-
ticated pose estimation algorithm. We show that the
accuracy of the resulting pose estimation is within the
constraints of the use case.
REFERENCES
Besl, P. J. and McKay, N. D. (1992). A method for regis-
tration of 3-d shapes. IEEE Transactions on Pattern
Analysis and Machine Intelligence.
Do, T.-T., Pham, T., Cai, M., and Reid, I. D. (2018). Lienet:
Real-time monocular object instance 6d pose estima-
tion. In BMVC.
Dwibedi, D., Misra, I., and Hebert, M. (2017). Cut, paste
and learn: Surprisingly easy synthesis for instance de-
tection. CoRR, abs/1708.01642.
Fischler, M. A. and Bolles, R. C. (1981). Random sample
consensus: A paradigm for model fitting with appli-
cations to image analysis and automated cartography.
Commun. ACM.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2014). Generative adversarial networks. Ad-
vances in Neural Information Processing Systems.
Howard, A. G., Zhu, M., Chen, B., Kalenichenko, D.,
Wang, W., Weyand, T., Andreetto, M., and Adam,
H. (2017). Mobilenets: Efficient convolutional neu-
ral networks for mobile vision applications. CoRR,
abs/1704.04861.
Johnson-Roberson, M., Barto, C., Mehta, R., Nittur Sridhar,
S., and Vasudevan, R. (2016). Driving in the matrix:
Can virtual worlds replace human-generated annota-
tions for real world tasks? CoRR, abs/1610.01983.
Juel, W. K., Haarslev, F., Ram
´
ırez, E. R., Marchetti, E., Fis-
cher, K., Shaikh, D., Manoonpong, P., Hauch, C., Bo-
denhagen, L., and Kr
¨
uger, N. (2019). Smooth robot:
Design for a novel modular welfare robot. Journal of
Intelligent & Robotic Systems.
Lin, T., Maire, M., Belongie, S. J., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Doll
´
ar, P.,
and Zitnick, C. L. (2014). Microsoft COCO: common
objects in context. CoRR, abs/1405.0312.
P
´
erez, P., Gangnet, M., and Blake, A. (2003). Poisson im-
age editing. ACM Trans. Graph.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., Berg, A. C., and Fei-Fei, L. (2015). Ima-
genet large scale visual recognition challenge. Inter-
national Journal of Computer Vision.
Russell, B. C., Torralba, A., Murphy, K. P., and Freeman,
W. T. (2008). Labelme: A database and web-based
tool for image annotation. Int. Journal of Computer
Vision.
Stein, G. J. and Roy, N. (2018). Genesis-rt: Generating syn-
thetic images for training secondary real-world tasks.
Int. Conf. on Robotics and Automation (ICRA).
von Ahn, L. and Dabbish, L. (2004). Labeling images with
a computer game. Proceedings of the SIGCHI Con-
ference on Human Factors in Computing Systems.
Wong, J. M., Kee, V., Le, T., Wagner, S., Mariottini, G.,
Schneider, A., Hamilton, L., Chipalkatty, R., Hebert,
M., Johnson, D. M. S., Wu, J., Zhou, B., and Torralba,
A. (2017). Segicp: Integrated deep semantic segmen-
tation and pose estimation. In Int. Conf, on Intelligent
Robots and Systems (IROS).
Xiang, Y., Schmidt, T., Narayanan, V., and Fox, D. (2017).
Posecnn: A convolutional neural network for 6d
object pose estimation in cluttered scenes. CoRR,
abs/1711.00199.
Yu, C., Wang, J., Peng, C., Gao, C., Yu, G., and Sang,
N. (2018). Bisenet: Bilateral segmentation net-
work for real-time semantic segmentation. CoRR,
abs/1808.00897.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. Int. Conf. on Com-
puter Vision (ICCV).
Synthetic Ground Truth for Presegmentation of Known Objects for Effortless Pose Estimation
489
