
Single Sketch Image based 3D Car Shape Reconstruction with Deep
Learning and Lazy Learning
Naoki Nozawa
1
, Hubert P. H. Shum
2,∗ a
, Edmond S. L. Ho
2 b
and Shigeo Morishima
3
1
Department of Pure and Applied Physics, Waseda University, Tokyo, Japan
2
Department of Computer and Information Sciences, Northumbria University, Newcastle upon Tyne, U.K.
3
Waseda Research Institute for Science and Engineering, Waseda University, Tokyo, Japan
Keywords:
Deep Learning, Lazy Learning, 3D Reconstruction, Sketch-based Interface, Car.
Abstract:
Efficient car shape design is a challenging problem in both the automotive industry and the computer anima-
tion/games industry. In this paper, we present a system to reconstruct the 3D car shape from a single 2D sketch
image. To learn the correlation between 2D sketches and 3D cars, we propose a Variational Autoencoder deep
neural network that takes a 2D sketch and generates a set of multi-view depth and mask images, which form
a more effective representation comparing to 3D meshes, and can be effectively fused to generate a 3D car
shape. Since global models like deep learning have limited capacity to reconstruct fine-detail features, we
propose a local lazy learning approach that constructs a small subspace based on a few relevant car samples in
the database. Due to the small size of such a subspace, fine details can be represented effectively with a small
number of parameters. With a low-cost optimization process, a high-quality car shape with detailed features
is created. Experimental results show that the system performs consistently to create highly realistic cars of
substantially different shape and topology.
1 INTRODUCTION
Car shape design is a common area in automo-
tive manufacturing, computer animation and games.
The design process is time-consuming and labour-
intensive, as it is a combination of arts and engineer-
ing. In the automotive manufacturing industry, con-
cept arts of the car surface, which are typically rep-
resented as sketches on predefined viewpoints, are
designed first. Such concept arts are then converted
into 3D for engineering design. However, there is no
guarantee that such a design can be finalized until the
engineers confirmed the interior fitting of mechani-
cal parts. Sometimes, it may take several iterations to
fulfil the requirements of both design and engineering
aspects. In the animation and games industry, while
there is no real-world engineering constraint, often
the artists need to build a large number of cars that re-
semble similar features from the real-world ones. We
believe that with an automatic system that can gen-
erate realistic 3D cars based on simple 2D sketches,
a
https://orcid.org/0000-0001-5651-6039
b
https://orcid.org/0000-0001-5862-106X
∗
Corresponding author
the design of cars, especially in the initial stages of
concept designs, can be a lot more efficient.
There are two major challenges of reconstructing
3D cars from 2D sketches. First, to improve the ef-
ficiency of car design, artists want to minimize the
number of sketches required to design each car. As a
result, there is not enough information to fully define
the 3D features of a car. Second, cars modelling is a
distinct problem as cars have common features such
as where to place the wheels, but also distinctive parts
such as the shape of rear wings and roofs. Past re-
search (Umetani, 2017) shows that it is challenging to
learn a diverse car subspace that represents both com-
mon and distinctive car features well.
In this paper, we propose a new 3D car design
interface that is based on a single 2D sketch, which
contains only the outline information on the car’s
shape. Since a single outline sketch cannot provide
enough information on 3D car reconstruction, our
framework estimates such missing information from
a 3D car shape database. Collecting pairwise sam-
ples of sketches and 3D car shapes is costly, which
hinders the use of powerful data-driven methods such
as deep learning for learning the reconstruction. We
propose to synthesize sketches from 3D car models
Nozawa, N., Shum, H., Ho, E. and Morishima, S.
Single Sketch Image based 3D Car Shape Reconstruction with Deep Learning and Lazy Learning.
DOI: 10.5220/0009157001790190
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 1: GRAPP, pages
179-190
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
179

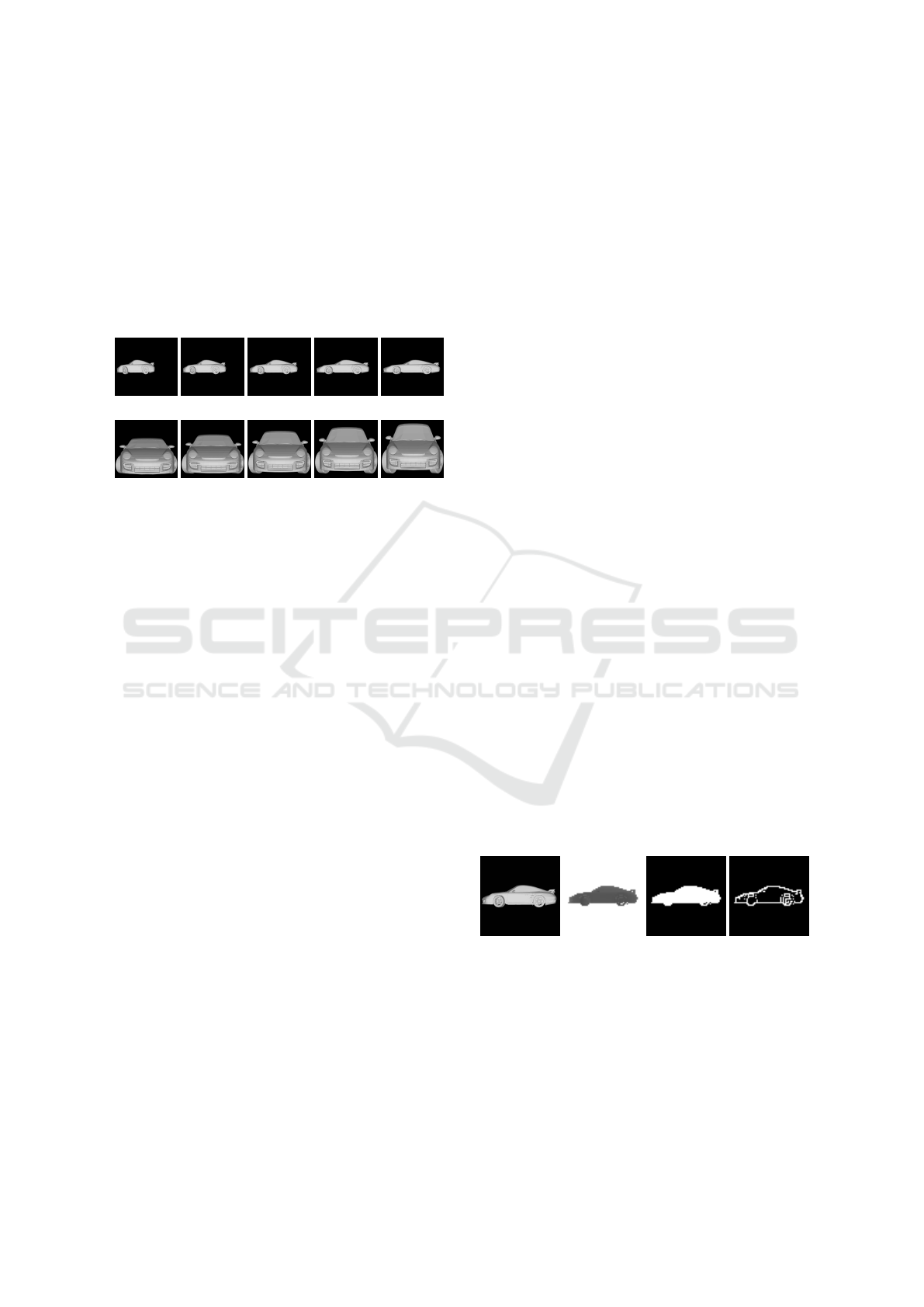
Figure 1: Examples of 3D car shapes generated by out system with side-view sketches.
obtained from ShapeNet (Chang et al., 2015). We fur-
ther propose a feature-preserving car mesh augmenta-
tion pipeline to increase the size of the database.
To tackle the challenge of modelling 3D car
shapes, we propose a novel 2-stage framework. The
first stage adapts the Variational Autoencoder (VAE)
(Kingma et al., 2014) deep learning network for cor-
relating a 2D sketch with the respective 3D mesh.
Since it is inefficient to learn the mesh in 3D, and 2D
to 3D correlation is not trivial, we propose to learn
an intermediate representation of multiple depth and
mask images instead, and reconstruct the 3D car mesh
as a post-processing step. Global systems like deep
learning have limited capability in representing fine
details (Umetani, 2017; G
¨
uler et al., 2018). As a so-
lution, we introduce a second processing stage that
adapts a lazy learning framework to learn a local sub-
space from the relevant samples in the database. Such
a subspace enables a low-cost optimization process to
generate a 3D car shape with fine details.
Experimental results show that high-quality car
shapes of substantially different shapes and topolo-
gies can be generated with rough 2D sketch images
(Figure 1). Apart from resembling the overall shape
in the 2D sketches, the generated car shapes contain
fine-detail features such as rear wings. The process
takes around 15 seconds to generate a shape using a
low-end computer.
The major contributions of this paper are summa-
rized as follows:
• We propose a Variational Autoencoder (VAE)
(Kingma et al., 2014) deep learning network to
learn the correlation between a 2D sketch and the
corresponding 3D shape. Instead of learning the
3D shape directly, we propose to learn an inter-
mediate multi-view depth and mask images rep-
resentation, which are then combined to form the
3D shape, for better training performance.
• We propose a lazy learning algorithm to learn a
local subspace to reconstruct the fine detail fea-
tures of the car. Such a subspace bases only on
the relevant car shapes in the database, and there-
fore facilitates effective training and robust usage.
• To facilitate the training processes, we propose a
feature-preserving mesh augmentation framework
to construct a large car database with pairwise 3D
mesh and 2D sketch, based on the small number
of car meshes in ShapeNet (Chang et al., 2015).
The rest of the paper is organized as follows. We
review previous work in Section 2. We explain the
construction of our car database in Section 3. We
present our Variational Autoencoder for generating
3D car shapes from 2D sketches in Section 4. We
present our lazy learning for constructing fine details
for the car in Section 5. We show the results of our
system in Section 6. We conclude the paper and dis-
cuss possible future directions in Section 7.
2 RELATED WORK
In this section, we review related work in the areas
of sketch-based interfaces for 3D design and machine
learning for 3D shape reconstruction.
2.1 Sketch-based Interfaces for 3D
Design
Contrary to professional computer-aided design soft-
ware that requires professional training and has an en-
gineering focus, sketch-based interfaces (Olsen et al.,
2009) are more designer-friendly. Existing research
has used sketches for a variety of applications such
as image retrieval (Eitz et al., 2011), motion synthesis
(Thorne et al., 2004), clothes design (Turquin et al.,
2007) and crowd control (Henry et al., 2012).
In particular, we are interested in utilizing
sketches to create 3D meshes. Igarashi et al. (Igarashi
et al., 2007) propose a 3D modelling system via a
sketch drawing interface that can reconstruct 3D poly-
gon surfaces by specifying contours. They further ex-
tend the method such that it construct smooth mesh
surfaces (Igarashi et al., 2006) and the internal struc-
ture of meshes (Owada et al., 2006). Nealen et al.
(Nealen et al., 2007) also extend this method to sup-
port ridge and valley area, while Gingold et al. (Gin-
gold et al., 2009) focus the extension on specifying
extra annotations such as angles and symmetrical in-
formation for generating the more detailed surface.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
180

Joshi et al. (Joshi and Carr, 2008) generate a 3D
inflating surface that interpolates input curves from a
sketch image while using mean curvature at bound-
ary vertices. Shtof et al. (Shtof et al., 2013) propose
a 3d modelling method that fits predefined 3D primi-
tives to the specified sketched curves. Schmidt et al.
(Schmidt et al., 2009) present a modelling interface
that constrains 3D lines and curves from single-view
sketches to generate surfaces in the right spatial loca-
tion. Shao et al. (Shao et al., 2012) infer the normal
map in an outline sketch with cross-sections to gener-
ate a 3D shape.
The focus of these works is to enable a user to
specify the important information of a mesh, while
utilizing artificial intelligence to estimate the unspec-
ified information. Since the big data of 3D shapes
has become more available, we are more interested in
machine learning-based approaches for shape recon-
struction.
In recent years, machine learning approaches
based on big data has shown to be effective in
modelling the relationship between sketches and 3D
meshes. Han et al. (Han et al., 2017) propose a
convolutional neural network (CNN) based system to
generate 3D faces from input sketches. Nishida et al.
(Nishida et al., 2016) adapt a CNN to generate build-
ing models by adding surface curve information as a
style of sketching. We also utilize deep learning for
constructing the sketch-based interface, but we adapt
the Variational Autoencoder (VAE) (Kingma et al.,
2014) for correlating the 2D sketch and the output
represented as depth and mask images. This is be-
cause such a generative model has shown promising
results in the translation of image style.
2.2 Machine Learning for 3D Shape
Reconstruction
The core of the problem of 3D shape reconstruction
is an effective representation of shapes. With the in-
troduction of comprehensive 3D shape databases such
as (Chang et al., 2015) and PASCAL3D (Xiang et al.,
2014), it has become possible to learn a more repre-
sentative latent space to represent and reconstruct 3D
shapes. In general, shapes can be represented as point
clouds, voxel and depth maps.
The point cloud representation has been used by
Fan et al. (Fan et al., 2017), in which they reconstruct
a 3D mesh with a single real-world image. Charles
et al. (Charles et al., 2017) presented PointNet,
which directly consume unstructured point clouds for
a range of applications such as 3D classification and
segmentation. They further extend the method into
PointNet++ (Qi et al., 2017) to capture local struc-
tures such that the network can recognize fine-grained
patterns. Groueix et al. (Groueix et al., 2018) uti-
lize point cloud or an image as an input to reconstruct
3D surfaces, but they infer a surface representation
directly for the output shape utilizing the UV coor-
dinate. There has been little work on reconstructing
point clouds with sketches, as it is more difficult to
find a good correlation between the 2D sketches and
the unstructured 3D point clouds.
The voxel representation has been used by De-
lanoy et al. (Delanoy et al., 2018). They take a sketch
as an input, and construct a CNN to predicts occu-
pancy of a 3D voxel grid that represents the output
mesh. Choy et al. (Choy et al., 2016) follow the
idea of using CNN to generate a volumetric occu-
pancy map for 3D reconstruction, and their method
does not require 2D image annotations or 3D object
classes. To enhance memory efficiency, Tatarchenko
et al. (Tatarchenko et al., 2017) propose to learn both
the structure of an octree and its corresponding occu-
pancy values of individual cells. Wang et al. (Wang
et al., 2017) also propose an octree-based CNN for
shape analysis. Despite this optimization, voxel meth-
ods are still a memory and computational cost con-
suming due to the need to model a 3D space.
The depth map representation has been used by
Lun et al. (Lun et al., 2017) to reconstruct 3D sur-
face form sketches. They use both depth and normal
maps to represent the shape, causing the use of ex-
tra memory. Due to the use of the U-net structure
(Ronneberger et al., 2015) like pix2pix (Isola et al.,
2017), the input sketch structure is over-preserved
and sketches that do not look like the objects in the
database cannot be effectively reconstructed. Li et
al. (Li et al., 2018a) propose a method to gener-
ate a detailed surface with considering curvature flow.
They construct multiple decoders for depth, mask and
curvature flow, and therefore the system requires ex-
tra memory. We also utilize depth maps as our net-
work output to model the 3D shape; however, our sys-
tem only needs to generate depth images and binary
masks, without the need for normal maps or curvature
flow. We propose a Laplacian-based loss function to
compensate for the lack of normal maps, allowing a
more memory efficient system.
As a global model, deep learning has shown to
have difficulties in representing fine details of the
shapes that are specific to a small cluster of samples
(Umetani, 2017). In the area of car reconstruction,
different categories of cars have different specific de-
tails such as side mirrors and rear wings. Past research
has shown that local models utilizing lazy learning
can help to preserve fine details in different problems.
Chai et al. (Chai and Hodgins, 2005) generate a hu-
Single Sketch Image based 3D Car Shape Reconstruction with Deep Learning and Lazy Learning
181
man surface from a sparse input with a large motion
database. Shen et al. (Shen et al., 2018) map complex
gestures to crowd movement for gesture-based crowd
control. Shum et al. (Shum et al., 2013) reconstruct
noisy human motion captured by Kinect. The main
idea is to extract relevant data based on a run-time
query and construct a local model during run-time. In
this work, we adapt lazy learning to generate the fine
details of a car based on the output generated by a
deep learning network.
Z-axis -20% Z-axis -10% Original Z-axis +10% Z-axis +20%
Y-axis -20% Y-axis 10% Original Y-axis +10% Y-axis +20%
Figure 2: Examples of 3D car meshes synthesized with our
feature-preserving data augmentation method.
3 DATABASE CREATION
As a data-driven approach, the diversity and quality
of the database is key to our system. We present
a robust and efficient process to construct a 3D car
mesh database. With a novel feature-preserving data
augmentation techniques, we create a large variety of
logically correct car meshes. They are converted into
two sets of representations: (1) 2D sketch, depth and
mask images for shape reconstruction, and (2) regis-
tered 3D point clouds for details synthesis.
3.1 Feature-preserving Car Mesh
Augmentation
We create our 3D car mesh by adapting data argu-
mentation process, which enhances the diversity and
size of our car model database by synthesizing high-
quality data.
While there are plenty of car images available on-
line, training a reliable 2D to 3D neural networks
would require pairwise 2D and 3D training samples.
Such pairwise data is challenging to obtain in the real-
world. Therefore, we propose to synthesize training
data from 3D car models, which are of high-quality
and can be used to produce different types of 2D im-
ages via projections.
We first gather car models from the ShapeNet
(Chang et al., 2015), which is one of the most compre-
hensive 3D shapes databases. However, the number
of car models is not enough for training a deep neu-
ral network. To solve the problem, we employ data
argumentation to synthesize more data samples.
Traditional linear scaling such as (Sela et al.,
2017) does not work well for car meshes because dif-
ferent parts of the car have to be handled in different
ways. For example, simply scaling the height of the
car would make a taller car body, but the wheels will
become ovals, which is logically incorrect.
As a solution, we adapt Kraevoy et al.’s method
(Kraevoy et al., 2008) for data argumentation, which
can resize the car shape while preserving important
features. The method utilizes a voxel grid that is re-
sized non-homogeneously according to vulnerability
of each voxel, and interpolate mesh vertices based on
the edited voxel grid. It then calculates the curvature
of contained vertices in each cell with the consid-
eration of neighbourhood vulnerability, and perform
mesh scaling while maintaining local features.
In our implementation, we set the resolution of the
voxel as 5 × 10 × 15 in the x, y, and z axes respec-
tively, and use Akenine-M
¨
ollser’s method (Akenine-
M
¨
ollser, 2001) to detect the intersection between ver-
tices and voxel. Finally, we resize the voxel grid along
with the height (i.e., y-axis) and length (i.e., z-axis)
directions only. This scaling in height and length only
is because the width direction is restricted by that of
the road, which is a constraint also applied in existing
car design processes. We set the resizing parameter
as ±20%, ±15%, ±10% and ±5% of each scalable
direction, and interpolate mesh vertices based on the
resized voxel grid using radial basis function (RBF)
interpolation.
With the original data of 7,028 cars, we synthe-
sized 56,224 cars using the aforementioned data aug-
mentation method. Figure 2 shows some examples
of the resized 3D models, in which features like the
wheels and the headlight are largely preserved.
(a) 3D mesh (b) Depth (c) Mask (d) Sketch
Figure 3: An example of converting a 3D car model into
different types of images.
3.2 The 2D Sketch, Depth and Mask
Images Representation
With the 3D meshes created, we produce the 2D
sketch, depth and mask images representation for
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
182

Figure 4: From left to right: the template, a car shape, and
the flow for mapping them.
training our deep learning system on car shape recon-
struction. Figure 3 shows an example of converting a
3D car mesh into different types of images.
To create the depth and mask images, we set up a
bounding box that contains the whole car. Then, we
emit rays from each face of the bounding box and ob-
tain the nearest intersection points with the car mesh.
We ignore the bottom face of the car and do not pro-
duce the corresponding depth and mask images. This
is because the bottom of the car typically consists
of highly complicated geometry involving holes and
complex shapes for mechanical gears.
We synthesize sketch images by employing a
Laplacian filter on the projected images of the car
meshes from the sides (i.e., x-axis), which can gener-
ate reliable sketch-like images that convey the outline
of the car meshes. This method works robustly and
does not require human intervention.
3.3 The Registered 3D Point Cloud
Representation
We also create a point cloud representation from the
3D meshes for the system to learn how to add details
to the car shapes. Since the focus of the research is the
outer shape of the cars, we remove internal vertices
inside the car body and generate a flat bottom plane
for each car. These allow us to obtain a set of clean
car shape point clouds that can be robustly registered
to discover the correspondence among car shapes.
We convert the mesh into a point cloud by sam-
pling the mesh surface uniformly using Corsini et al.’s
method (Corsini et al., 2012). The major challenge is
that the method is controlled based on sampling den-
sity, which is fed into a Poisson disk sampling pro-
cess, instead of the total number of points. Because
of this, cars of different size have a dramatically dif-
ferent number of sample points, which posts unneces-
sary complexity and unpredictable computational cost
in the later on processes. Therefore, we implement
an iterative function to find out the required sampling
density of each car that can produce the point num-
ber within a predefined range. To further enforce the
same number of points among cars, we randomly re-
move points sampled until the number reach the tar-
get. We found that point number of 10,000 has a good
balance of visual quality and computational cost.
Finally, we propose a registration process to align
the point clouds of different cars. Motivated by
(Henry et al., 2014; Shen et al., 2019), we formulate
the problem as an optimal transportation problem. We
first pick a random point cloud of a car as a template,
and then evaluate the Earth Mover’s Distance (EMD)
between the template and the rest of the cars. We uti-
lize squared Euclidean cost as suggested by (Li et al.,
2018b). Since we have the same number of points
for all point clouds, the optimal flow from the tem-
plate to the target point cloud of a car has a 1-to-1
correspondence, which therefore is considered as the
registration result. Comparing to deformation-based
methods (Amberg et al., 2007; Li et al., 2008) that fit
a template to the target shape, our method is more
robust to cars that have different mesh topologies.
Comparing to feature point-based methods (Rusu and
Cousins, 2011) that calculate the mapping between
the template and the target shape directly using fea-
ture points, our method generates a much denser cor-
respondence.
4 VARIATIONAL
AUTOENCODER FOR CAR
SHAPE RECONSTRUCTION
In this section, we present a deep neural network to
reconstruct 3D car shapes from 2D sketches.
Following the advice and design culture of the car
manufacturing industry, we take a single side view
sketch as the input of our system. However, our sys-
tem is expandable to supporting sketches from multi-
ple views by duplicating the network architecture.
Instead of directly outputting the 3D point cloud
(Fan et al., 2017; Charles et al., 2017) or the vox-
els (Delanoy et al., 2018; Choy et al., 2016) of a car,
we propose to output a set of depth and mask images
from the side, top, front and rear views, and recon-
struct the 3D vertices by combining them. This is
mainly due to the high complexity and memory cost
for a network to maintain a smooth surface while pre-
serving the volume for complicated 3D shapes.
We adapt Variational Autoencoder (VAE)
(Kingma et al., 2014) for getting the depth and
mask images, as such a generative model has shown
promising results in image translation by altering the
output with a different style. While VAE is inferior to
Generative Adversarial Network (GAN) (Isola et al.,
2017; Chen and Koltun, 2017; Wang et al., 2018) in
terms of the appearance of the output, it is difficult to
control the image synthesis process in GAN to create
multiple outputs. Also, it takes much longer to train
GAN and to guarantee network convergence. In our
situation, we prefer VAE as it produces results with
Single Sketch Image based 3D Car Shape Reconstruction with Deep Learning and Lazy Learning
183

high enough quality to generate a car shape, and the
details of the car are introduced as a second stage
process.
4.1 Network Design
We adapt an encoder-decoder network structure for
generating the depth and mask images, as shown in
Figure 5. The decoder needs to generate both images
in multiple predefined views. Existing research typ-
ically prepares multiple decoders, with one decoder
generating one output view (Li et al., 2018a; Lun
et al., 2017). However, such an approach increases
computational cost and memory requirement signifi-
cantly, considering that we need to generate four dif-
ferent views (i.e., front, rear, side, and top).
As a solution, our network shares the decoder
among multiple views at the first layer, in which we
have an independent final layer for each view. Each
output from the last layer has two channels, which are
the depth and mask images respectively. This design
is driven by the observation that there is shared in-
formation across different views. By sharing the first
layer in the decoder, such information can be discov-
ered. Apart from the massive reduction in memory
usage and training time, such a setup allows the differ-
ent output views to be more coherence and produces
higher quality results. We justify our choice in the de-
coder network design by conducting an ablation test
in Section 6.3.
4.2 The Loss Function
VAE typically involves two types of the loss function,
which are the cross-entropy loss (i.e., reconstruction
loss) and the Kullback-Leibler (KL) divergence loss.
In the following, we explain our design of loss func-
tions.
For the mask image, we use binary cross-entropy
loss between the generated images and the ground
truths. Such a loss is effective for data that follow
the Bernoulli distribution like the mask images. Each
mask image is normalized from [-1, 1] to [0, 1] to fa-
cilitate the binary cross-entropy. The loss has the ef-
fect of detecting the area where the car shape should
exist in the world coordinate.
For the depth images, in order to ignore pixels that
do not belong to the car, we mask the estimate depth
images with the estimated mask images when calcu-
lating the loss. We implement two loss functions - the
mean absolute error (MAE, L1 loss) on the masked
depth images, and another MAE on their Laplacian
representations.
We implement MAE between the generated depth
images and the ground truths. MAE is used because
depth images do not follow the Bernoulli distribution
and therefore is not suitable for binary cross-entropy
loss. While it is possible to apply cross-entropy loss
or mean square error (L2 loss) by assuming Gaussian
data distribution, such losses are known to be too sen-
sitive to outlier and are less robust in deep learning.
On the contrary, L1 loss considers neighbourhood in-
formation in image generation (Isola et al., 2017) and
is suitable for depth estimation whose output tends to
have a lower frequency than natural images.
We apply a second MAE loss on the Laplacian
representation of the generated depth images and the
ground truths. We apply a second MAE loss because
while the first loss can represent the shape and posi-
tion of the car, this first loss is too weak to represent
surface appearance. The Laplacian representation is
computed by applying the following Laplacian filter
to the depth image:
1
8
1
8
1
8
1
8
−1
1
8
1
8
1
8
1
8
(1)
The Laplacian representation is comparable to a
normal representation, but it can be directly deduced
from the depth images. Some may consider training a
multi-task network with ground-truth normal images
(Li et al., 2018a; Lun et al., 2017), but such an ap-
proach is memory consuming and difficult for hyper-
parameters tuning (e.g. the relative weight between
tasks). Our Laplacian MAE loss can represent the sur-
face appearance with no impact on the network size.
Finally, a standard KL divergence loss added to
the VAE network structure that encodes the latent vec-
tor. We assume that the latent vector follows a Gaus-
sian distribution and can be expressed using mean and
standard deviation.
The final loss function is expressed as:
E =
D
re f
− D
rec
) ◦ M
re f
L1
+
M
re f
− M
rec
BCE
+ (
∆D
re f
− ∆D
rec
) ◦ M
re f
)
L1
+ KLLoss
(2)
where D
re f
and M
re f
are Depth and Mask images of
the ground truths, D
rec
and M
rec
are those of recon-
structed images, the subscripts L1 and BCE(binary
cross-entropy) represent the calculation metrics, ∆
means Laplacian filtering and ◦ is the Hadamard
product, KLLoss is the standard KL loss function.
4.3 Surface Reconstruction
Having generated the depth and mask images in dif-
ferent views as the output of our proposed deep learn-
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
184

Figure 5: The encoder-decoder network structure.
Figure 6: From left to right: the reconstructed shape by the
network, the reconstructed surface, and the registered point
cloud.
ing framework, a rough 3D point cloud is recon-
structed as a post-processing steping step. Specifi-
cally, a point cloud that represents part of the car can
be computed from the mask and depth image pair in
each view. The shape of the whole vehicle can be re-
constructed by combining the point clouds extracted
from all views (Figure 6 (left)). Next, Poisson surface
reconstruction is applied to the point cloud to recon-
struct the entire surface of the car (Figure 6 (middle)).
The surface of the car enables us to sample points uni-
formly, which facilitates the point cloud registration
process. This step is equivalent to the point cloud
standardization process as in the database creation
(Section 3.3). Finally, the registered point cloud (Fig-
ure 6 (right)) computed from the output of our pro-
posed deep learning framework can be compared with
our car database in the lazy learning stage in Section
5.
4.4 Implementation
The system is implemented in Tensorflow. For opti-
mization, we use Adam solver with a learning rate 1e-
5. The decoder has a dropout ratio of 0.5 except for
the last layer. We use ReLU as the activation func-
tion for the hidden layers in the encoder, and Leaky
ReLU for that in the decoder, as in pix2pix (Isola
et al., 2017). We use tanh as the activation function
for output layers. To speed up the system, the resolu-
tion of the input images in VAE is only 64 × 64. We
train the system using the data generated by data aug-
mentation, and test the system with the original data
from ShapeNet (Chang et al., 2015). This ensures that
accurate testings are done with unaltered data.
5 LAZY LEARNING FOR FINE
DETAILS
While the main bodies of cars share a lot of common
geometric similarities, the fine details such as side
mirrors and rear wings can be different. Learning a
global model from all cars for fine details is there-
fore highly ineffective. Motivated by the success of
lazy learning in mesh processing (Chai and Hodgins,
2005; Shen et al., 2018; Ho et al., 2013), we propose
to adapt lazy learning to reconstructed the details of
the car shape.
Unlike traditional machine learning approaches
that generalize data in the whole database as a pre-
process, lazy learning postpones the generalization
to run-time (Chai and Hodgins, 2005). As a result,
lazy learning can utilize run-time information to limit
the scale of learning. In particular, given a run-time
query, relevant data in the database can be extracted
and a small scale learning process can be performed.
Due to the consideration of the most relevant data,
the common features can be represented, even though
those features may be insignificant on a global scale.
Also, the similarity of relevant data allows lazy learn-
ing to use a much lower dimensional latent space
comparing to traditional methods.
5.1 Relevant Data Search
Here, we explain how we search for relevant data
from the database to perform lazy learning. Given a
car shape generated in Section 4, we search for the k
nearest samples from the database. As the point cloud
is registered (i.e., it aligns with a pre-defined template
car shape), we can effectively calculate the distance
using the sum of Euclidean distances from all points
between two point clouds. However, such a search
may focus too much on fine details, which the gener-
ated car shape does not have, and is slow due to the
high dimensionality of the point clouds.
As a solution, we propose to apply Principal Com-
ponent Analysis (PCA) onto the position of the point
Single Sketch Image based 3D Car Shape Reconstruction with Deep Learning and Lazy Learning
185

clouds to generate a search space, instead of using
the Cartesian space. Searching with the more impor-
tant components of PCA allows a faster search with
less focus of fine details. From the experiments, we
found that the first 40 components can represent the
point cloud with 10, 000 3D points reasonably well,
with around 90% of accumulated variance ratio. We,
therefore, perform a database search by considering
the root mean square distances of the 40 PCA com-
ponents to find k nearest neighbours. Empirically, we
found that setting k = 5 produces good results.
5.2 Learning and Optimization in Local
Space
With the k nearest neighbours selected from the
database, we can then learn a small subspace with
PCA. Since these neighbours are similar to each other,
the details of the shape can be well preserved with a
smaller number of components. In such a subspace,
we optimize a set of eigenvalues to construct a car
shape that is as similar as possible to the one gen-
erated by deep learning. We then back project the
eigenvalues to formulate a car shape with shape de-
tails such as the headlight, which is served as our final
output.
We utilize the 3D Morphable Model (Blanz and
Vetter, 1999) to optimize the eigenvalues of the con-
sidered components with a non-linear optimization
process. To evaluate the distance between the opti-
mizing shape and target shape, we utilize the Carte-
sian space. Since the point clouds are registered, a
simple point-to-point Euclidean distance works well.
Obtaining the Cartesian representation of the optimiz-
ing shape is simple - we back-project the optimized
eigenvalues to the Cartesian space.
To further improve the optimization process, we
find that a simple pre-process can help to construct an
even more representative local PCA space with the k
nearest neighbours. The idea is based on the observa-
tion that there are still small variations in car shapes
within the k nearest neighbours, which distracts the
system from the main objective of obtaining the de-
tailed shape features. As a solution, we pre-optimize
each of these shape using the same 3D Morphable
Model-based optimization process described above,
such that they all have a similar car shape with the
target one, before we construct the local PCA space.
This way, the significant components of the local PCA
space can represent more on the detailed shape fea-
tures.
6 EXPERIMENTAL RESULTS
In this section, we will first present the experimen-
tal results on reconstructing 3D car shape from input
sketches. Next, we quantitatively analyze the training
loss during the training process to show the conver-
gence of the proposed framework. Finally, an abla-
tion test will be presented to demonstrate the results
obtained from different decoder network architectures
and justify our choice.
The training of the deep learning system is per-
formed with an NVIDIA TITAN X Pascal GPU that
has 12GB VRAM. With the batch size of 32, the train-
ing finishes within a day. The run-time system is per-
formed on a lower-end computer with an NVIDIA
GeForce 1060 GPU that has 3GB VRAM, an Intel
Core i7-6700K CPU and 16GB of RAM. The recon-
struction of a car takes around 15 seconds to finish,
with 5 seconds on car shape reconstruction (i.e., deep
learning) and 10 seconds on reconstruction detail fea-
tures (i.e., lazy learning).
6.1 Reconstructing 3D Shape from
Input Sketches
Since different users may have different drawing
styles (e.g. more cartoon-like), real-world sketches
are not objective to evaluate the performance of the
proposed system. As a result, we utilize the synthetic
sketch images for testing.
Figure 8 shows the system output during each of
the processing steps, including the input sketches, the
meshes constructed from depth images (i.e., the out-
put of deep learning), registered point clouds from
those meshes and detailed added point clouds (i.e.,
the output of lazy learning). It can be observed that
the car shapes constructed by deep learning already
have similar car body with the input sketch. The final
results with the detailed added by the lazy learning
are highly realistic, with side mirrors and rear wings.
More results can be found in Figure 1. However, de-
tails like grilles or wheels are not encoded well for
practical use of games or movies. The EMD registra-
tion process can cause such low-quality appearances
because EMD is based on optimal transportation with
global distribution, which can ignore small features.
Also, the converting process into point clouds can
reduce mesh resolution that is closely related to de-
tails. We will consider landmarks on 3D mesh in
the sampling and registration process. Furthermore,
the input sketches can affect appearance because of
sparse information comparing with photorealistic im-
ages. Feature extraction from sketches is still an open
problem in the field of deep learning, so we will up-
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
186

(a) Depth Loss (b) Mask Loss (c) Laplacian Loss (d) KL Loss (e) Total Loss
Figure 7: Losses across epoch during the training stage.
Figure 8: Intermediate outputs. From top to bottom:
sketches, meshes from generated depth images, recon-
structed surfaces, sampled point clouds on surfaces, and
point clouds with details.
date our network structure. An interactive sketch-
based system will improve appearance as well.
We found that while the point clouds generated
closely resemble real cars, the generated mesh may
have artefacts around sharp edges. This is due to a
well-known point sampling problem in which the sys-
tem samples points around sharp edges instead of the
edges themselves. When performing triangulation to
obtain the mesh from the point cloud, there can be
some zigzag pattern around those edges. We ignore
the problem here since sampling is not a major focus
of our paper, but more advanced sampling methods
such as (Gauthier and Poulin, 2009) can be employed
if needed.
Figure 9 shows the effect of k in lazy learning.
Figure 9 shows that our system can reconstruct the
car details, and the choice of k = 5 generates good
quality of point clouds with a high level of detail. In
general, a higher k produces smoother results, while
a smaller k results in less power to reconstruct shape
that fits the target. We also show some failure cases
in Figure 10, in which the generated point clouds are
either too noisy or not similar to the input sketches.
We deduce that this is likely because the car styles
related to these input sketches are not common in the
database, and the deep learning system does not learn
a stable manifold for such samples.
6.2 Training Loss
To quantitatively evaluate the effectiveness of the pro-
posed framework, the plot of different training losses
during the training process is illustrated in Figure 7.
It indicates that the training process is stable, and the
depth, mask and Laplacian losses are small when the
Figure 9: Results generated with different k. From top to
bottom: sketches, point clouds with k = 1, k = 3, k = 5 and
k = 7.
Figure 10: Lower-quality results for sketches that has few
similar samples in the database.
system converges. Notice that the KL loss works as a
constraint and thus the converging direction is upside-
down.
6.3 Ablation Tests on Different Decoder
Network Architectures
As explained in Section 4.1, decoders are used for
generating depth and mask images in different views
for reconstructing the 3D shape of the car from the
input sketches. While the images in different views
have a different appearance, they are associated with
the same underlying 3D shape. This motivated us to
share a common layer among the decoders in the net-
work design to preserve the underlying structure and
improve the consistency among all synthesized views.
In our proposed encoder-decoder network structure
(see Figure 5), each decoder consists of five layers. In
the ablation test, we vary the number of shared layers
in the decoder from 0 (i.e., not sharing any layer) to
4. The different decoder architectures are illustrated
in Figure 11.
A wide range of 3D car shapes are reconstructed
using different decoder network architectures and the
results are illustrated in Figure 12. It can be seen that
Single Sketch Image based 3D Car Shape Reconstruction with Deep Learning and Lazy Learning
187

(a) No shared layer (b) A one-layer shared (c) Two layers shared (d) Three layers shared (e) Four layers shared
Figure 11: Different decoder network architectures for the ablation test.
Figure 12: The 3D point clouds reconstructed with different
decoder architectures. From top to bottom: input sketches,
results of the decoder with no shared layer, sharing the first
layer, sharing the first two layers, sharing the first three lay-
ers, and sharing first four layers.
our proposed decoder architecture with sharing only
the first layer (3rd row in Figure 12) produces the best
results in terms of reproducing the car shape with a
smooth surface. On the other hand, sharing too many
layers (5th and 6th rows in Figure 12) and not shar-
ing any layer (2nd row in Figure 12) result in nois-
ier 3D point clouds, which can be caused the loss of
balance between preserving the underlying structure
among decoders and refining each view. Sharing the
first two layers (3rd row in Figure 12) also produces
results with good visual quality, however, the recon-
structed 3D shape is less similar to the input sketches
when compare with the results obtained from our pro-
posed network. This highlights the optimally of our
proposed network design.
7 SUMMARY AND FUTURE
DIRECTIONS
In this paper, we present a system to reconstruct de-
tailed 3D car shapes with a single 2D sketch im-
age. To effectively learn the correlation between
2D sketches and 3D cars, we propose a Variational
Autoencoder (VAE) with an intermediate multi-view
depth image representation as to the output, and con-
struct the 3D cars as a post-processing step. To en-
sure the volume and diversity of the training data, we
propose a feature-preserving augmentation pipeline to
synthesize more car meshes while keeping the shape
of important features such as the wheels (Figure 2).
Finally, since deep learning has limited capability in
representing fine details, we propose a lazy learning
algorithm to construct a small subspace-based only
on a few relevant database samples for optimizing a
car shape with fine-detail features. We show that the
system performs robustly in creating cars of substan-
tially different shape and topology, with realistic de-
tailed features included.
Since we are mainly interested in the artistic part
of car design, we focus on the exterior shape instead
of the internal mechanical parts. In fact, we remove
internal vertices when we construct the car database
for a more efficient training process. In the future, we
would like to research on the engineering aspect of
car design, by considering the necessary space to fit
in different mechanical parts such as different models
of engines.
One future direction is to look into the gap be-
tween synthetic and real-world sketches. We utilize
a Laplacian filter to synthesize sketch images. While
that is an effective method to generate sketches, we
observe that real-world images could be different de-
pendent on the users. For example, some users may
not draw straight lines or perfect circles. Also, real-
world sketches have variations in pen stroke, paper,
and colour. We are interested in transfer learning tech-
niques to bridge the gap between synthetic and real-
world sketches. We also look forward to fully evalu-
ate the system by introducing different drawing styles
of real-world sketch images.
We use multi-view depth images as an intermedi-
ate representation in the VAE network. The two ma-
jor advantages are that we do not need to deal with 3D
deep learning, which is memory hungry and compli-
cated to train, as well as we can have more explicit 2D
to 2D correlation in the VAE network. Right now, we
combine the depth images as a post-processing step.
However, it is possible to consider them as a mean of
rectifying the output space, and construct extra layers
to learn the regression between multi-view depth im-
ages and 3D shapes. One future direction is to explore
network architectures for this purpose, and introduce
more views of depth images in a middle layer of the
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
188

network for supervision.
We employ lazy learning in reconstructing the de-
tails of the cars. Such an approach is robust and
effective, but it requires a run-time search on a k-
nearest neighbour, which could be time-consuming
if the database is large. In the future, we will con-
sider advanced data structures such as k-d trees or
landmark-based k-mean clustering to speed up the
searching process.
ACKNOWLEDGEMENTS
This project was supported in part by the Royal So-
ciety (Ref: IES\R2\181024 and IES\R1\191147)
and the Defence and Security Accelerator (Ref:
ACC6007422) and JST ACCEL (JPMJAC1602) and
JST-Mirai Program (JPMJMI19B2) and JSPS KAK-
ENHI (JP19H01129).
REFERENCES
Akenine-M
¨
ollser, T. (2001). Fast 3d triangle-box overlap
testing. Journal of Graphics Tools, 6(1):29–33.
Amberg, B., Romdhani, S., and Vetter, T. (2007). Opti-
mal step nonrigid icp algorithms for surface registra-
tion. In 2007 IEEE Conference on Computer Vision
and Pattern Recognition, pages 1–8.
Blanz, V. and Vetter, T. (1999). A morphable model for
the synthesis of 3d faces. In Proceedings of the 26th
Annual Conference on Computer Graphics and Inter-
active Techniques, SIGGRAPH ’99, pages 187–194,
New York, NY, USA. ACM Press/Addison-Wesley
Publishing Co.
Chai, J. and Hodgins, J. K. (2005). Performance animation
from low-dimensional control signals. ACM Trans.
Graph., 24(3):686–696.
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan, P.,
Huang, Q., Li, Z., Savarese, S., Savva, M., Song, S.,
Su, H., Xiao, J., Yi, L., and Yu, F. (2015). ShapeNet:
An Information-Rich 3D Model Repository. Techni-
cal Report arXiv:1512.03012 [cs.GR], Stanford Uni-
versity — Princeton University — Toyota Technolog-
ical Institute at Chicago.
Charles, R. Q., Su, H., Kaichun, M., and Guibas, L. J.
(2017). Pointnet: Deep learning on point sets for 3d
classification and segmentation. In 2017 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 77–85.
Chen, Q. and Koltun, V. (2017). Photographic image syn-
thesis with cascaded refinement networks. In Proceed-
ings of the IEEE International Conference on Com-
puter Vision, pages 1511–1520.
Choy, C. B., Xu, D., Gwak, J., Chen, K., and Savarese, S.
(2016). 3d-r2n2: A unified approach for single and
multi-view 3d object reconstruction. In The European
conference on computer vision (ECCV). Springer.
Corsini, M., Cignoni, P., and Scopigno, R. (2012). Effi-
cient and flexible sampling with blue noise properties
of triangular meshes. IEEE Trans. on Visualization
and Computer Graphics, 18(6):914–924.
Delanoy, J., Aubry, M., Isola, P., Efros, A., and Bousseau,
A. (2018). 3d sketching using multi-view deep volu-
metric prediction. Proceedings of the ACM on Com-
puter Graphics and Interactive Techniques, 1(21).
Eitz, M., Hildebrand, K., Boubekeur, T., and Alexa, M.
(2011). Sketch-based image retrieval: Benchmark and
bag-of-features descriptors. IEEE Trans. on Visualiza-
tion and Computer Graphics, 17(11):1624–1636.
Fan, H., Su, H., and Guibas, L. J. (2017). A point set gener-
ation network for 3d object reconstruction from a sin-
gle image. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 605–
613.
Gauthier, M. and Poulin, P. (2009). Preserving sharp edges
in geometry images. In Proceedings of Graphics
Interface 2009, GI ’09, pages 1–6, Toronto, Ont.,
Canada, Canada. Canadian Information Processing
Society.
Gingold, Y., Igarashi, T., and Zorin, D. (2009). Struc-
tured annotations for 2d-to-3d modeling. ACM Trans.
Graph., 28(5):148:1–148:9.
G
¨
uler, R. A., Neverova, N., and Kokkinos, I. (2018). Dense-
pose: Dense human pose estimation in the wild. In
2018 IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 7297–7306.
Groueix, T., Fisher, M., Kim, V. G., Russell, B. C., and
Aubry, M. (2018). Atlasnet: A papier-m\ˆ ach\’e
approach to learning 3d surface generation. arXiv
preprint arXiv:1802.05384.
Han, X., Gao, C., and Yu, Y. (2017). Deepsketch2face:
a deep learning based sketching system for 3d face
and caricature modeling. ACM Trans. Graph. (TOG),
36(4):126.
Henry, J., Shum, H. P. H., and Komura, T. (2012).
Environment-aware real-time crowd control. In Pro-
ceedings of the ACM SIGGRAPH/Eurographics Sym-
posium on Computer Animation, SCA ’12, pages 193–
200, Aire-la-Ville, Switzerland. Eurographics Associ-
ation.
Henry, J., Shum, H. P. H., and Komura, T. (2014). In-
teractive formation control in complex environments.
IEEE Trans. on Visualization and Computer Graph-
ics, 20(2):211–222.
Ho, E. S. L., Shum, H. P. H., Cheung, Y.-m., and Yuen, P. C.
(2013). Topology aware data-driven inverse kinemat-
ics. Computer Graphics Forum, 32(7):61–70.
Igarashi, T., Igarashi, T., and Hughes, J. F. (2006). Smooth
meshes for sketch-based freeform modeling. In ACM
SIGGRAPH 2006 Courses, SIGGRAPH ’06, New
York, NY, USA. ACM.
Igarashi, T., Igarashi, T., Matsuoka, S., and Tanaka, H.
(2007). Teddy: A sketching interface for 3d freeform
design. In ACM SIGGRAPH 2007 Courses, SIG-
GRAPH ’07, New York, NY, USA. ACM.
Single Sketch Image based 3D Car Shape Reconstruction with Deep Learning and Lazy Learning
189

Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In Proceedings of the IEEE conference
on computer vision and pattern recognition, pages
1125–1134.
Joshi, P. and Carr, N. A. (2008). Repouss
´
e: Automatic in-
flation of 2d artwork. In SBM, pages 49–55. Citeseer.
Kingma, D. P., Mohamed, S., Rezende, D. J., and Welling,
M. (2014). Semi-supervised learning with deep gener-
ative models. In Advances in neural information pro-
cessing systems, pages 3581–3589.
Kraevoy, V., Sheffer, A., Shamir, A., and Cohen-Or, D.
(2008). Non-homogeneous resizing of complex mod-
els. In ACM SIGGRAPH Asia 2008 Papers, SIG-
GRAPH Asia ’08, pages 111:1–111:9, New York, NY,
USA. ACM.
Li, C., Pan, H., Liu, Y., Tong, X., Sheffer, A., and Wang,
W. (2018a). Robust flow-guided neural prediction
for sketch-based freeform surface modeling. In SIG-
GRAPH Asia 2018 Technical Papers, page 238. ACM.
Li, C., Pan, H., Liu, Y., Tong, X., Sheffer, A., and Wang,
W. (2018b). Robust flow-guided neural prediction for
sketch-based freeform surface modeling. ACM Trans.
Graph., 37(6):238:1–238:12.
Li, H., Sumner, R. W., and Pauly, M. (2008). Global cor-
respondence optimization for non-rigid registration of
depth scans. Computer Graphics Forum, 27(5):1421–
1430.
Lun, Z., Gadelha, M., Kalogerakis, E., Maji, S., and Wang,
R. (2017). 3d shape reconstruction from sketches via
multi-view convolutional networks. In 2017 Interna-
tional Conference on 3D Vision (3DV), pages 67–77.
IEEE.
Nealen, A., Igarashi, T., Sorkine, O., and Alexa, M.
(2007). Fibermesh: Designing freeform surfaces with
3d curves. ACM Trans. Graph., 26(3).
Nishida, G., Garcia-Dorado, I., Aliaga, D. G., Benes, B.,
and Bousseau, A. (2016). Interactive sketching of ur-
ban procedural models. ACM Trans. Graph. (TOG),
35(4):130.
Olsen, L., Samavati, F. F., Sousa, M. C., and Jorge, J. A.
(2009). Sketch-based modeling: A survey. Computers
& Graphics, 33(1):85 – 103.
Owada, S., Nielsen, F., Nakazawa, K., Igarashi, T., and
Igarashi, T. (2006). A sketching interface for model-
ing the internal structures of 3d shapes. In ACM SIG-
GRAPH 2006 Courses, SIGGRAPH ’06, New York,
NY, USA. ACM.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space. In Proceedings of the 31st Interna-
tional Conference on Neural Information Processing
Systems, NIPS’17, pages 5105–5114, USA. Curran
Associates Inc.
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation. In International Conference on Medical
image computing and computer-assisted intervention,
pages 234–241. Springer.
Rusu, R. B. and Cousins, S. (2011). 3d is here: Point cloud
library (pcl). In 2011 IEEE International Conference
on Robotics and Automation, pages 1–4.
Schmidt, R., Khan, A., Singh, K., and Kurtenbach, G.
(2009). Analytic drawing of 3d scaffolds. ACM Trans.
Graph. (TOG), 28(5):149.
Sela, M., Richardson, E., and Kimmel, R. (2017). Unre-
stricted facial geometry reconstruction using image-
to-image translation. In 2017 IEEE International
Conference on Computer Vision (ICCV), pages 1585–
1594.
Shao, C., Bousseau, A., Sheffer, A., and Singh, K. (2012).
Crossshade: Shading concept sketches using cross-
section curves. ACM Trans. Graph. (SIGGRAPH Con-
ference Proceedings), 31(4).
Shen, Y., Henry, J., Wang, H., Ho, E. S. L., Komura, T.,
and Shum, H. P. H. (2018). Data-driven crowd motion
control with multi-touch gestures. Computer Graph-
ics Forum, 37(6):382–394.
Shen, Y., Yang, L., Ho, E. S. L., and Shum, H. P. H. (2019).
Interaction-based human activity comparison. IEEE
Trans. on Visualization and Computer Graphics.
Shtof, A., Agathos, A., Gingold, Y., Shamir, A., and
Cohen-Or, D. (2013). Geosemantic snapping for
sketch-based modeling. Computer Graphics Forum,
32(2pt2):245–253.
Shum, H. P. H., Ho, E. S. L., Jiang, Y., and Tak-
agi, S. (2013). Real-time posture reconstruction
for microsoft kinect. IEEE Trans. on Cybernetics,
43(5):1357–1369.
Tatarchenko, M., Dosovitskiy, A., and Brox, T. (2017). Oc-
tree generating networks: Efficient convolutional ar-
chitectures for high-resolution 3d outputs. In The
IEEE International Conference on Computer Vision
(ICCV).
Thorne, M., Burke, D., and van de Panne, M. (2004). Mo-
tion doodles: An interface for sketching character mo-
tion. ACM Trans. Graph., 23(3):424–431.
Turquin, E., Wither, J., Boissieux, L., Cani, M., and
Hughes, J. F. (2007). A sketch-based interface for
clothing virtual characters. IEEE Computer Graphics
and Applications, 27(1):72–81.
Umetani, N. (2017). Exploring generative 3d shapes us-
ing autoencoder networks. In SIGGRAPH Asia 2017
Technical Briefs, SA ’17, pages 24:1–24:4, New York,
NY, USA. ACM.
Wang, P.-S., Liu, Y., Guo, Y.-X., Sun, C.-Y., and Tong,
X. (2017). O-cnn: Octree-based convolutional neural
networks for 3d shape analysis. ACM Trans. Graph.,
36(4):72:1–72:11.
Wang, T., Liu, M., Zhu, J., Tao, A., Kautz, J., and Catan-
zaro, B. (2018). High-resolution image synthesis and
semantic manipulation with conditional gans. In 2018
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 8798–8807.
Xiang, Y., Mottaghi, R., and Savarese, S. (2014). Beyond
pascal: A benchmark for 3d object detection in the
wild. In IEEE Winter Conference on Applications of
Computer Vision, pages 75–82.
GRAPP 2020 - 15th International Conference on Computer Graphics Theory and Applications
190
