
Effects of Agents’ Embodiment and Robot Anxiety Scale on Social
Priming
Tomoko Koda
*
and Kensuke Kikuzawa
Department of Information Science and Technology, Osaka Institute of Technology, Osaka, Japan
Keywords: Virtual Agent, Conversational Agent, Humanoid Robot, Social Priming, Priming Effect, Social Presence,
Embodiment, Robot Anxiety Scale, RAS.
Abstract: In this study, we focus on the priming effect that would affect the social relationships among the agent, robot,
and human because the opportunities to converse with robots and agents are increasing. This research
investigated the effect of embodiment of the priming agent on the perception of social presence of the primed
agent. The preliminary results did not support our hypothesis that "the social presence of the primed agent
becomes higher when the embodied robot primes than when the virtual agent primes." However, the results
indicated that there is a dichotomy in the perceived social presence between the participants' groups when we
divide them according to their anxiety level toward robots. This indicates that the priming effect on the social
presence of the primed agent is different depending on the embodiment of the priming agent and people's
anxiety toward robots.
1 INTRODUCTION
In recent years, our daily lives widely include
humanoid robots and virtual agents equipped with
conversational ability. Robots and agents help
humans as receptionists, museum guides, and even as
job interviewers. Because of their ability to converse
with humans, they can affect the social relationship
between the humans, agents, and robots. In this study,
we focus on the priming effect that would affect the
social relationships among the agent, robot, and
human. Priming effect is a phenomenon in which
giving prior information influences a person's later
judgment (Bargh, et al. 1996). Priming effect occurs
among humans in everyday life. Because the
opportunities to converse with robots and agents are
increasing, we believe it is important to investigate
the effect of priming on the social relationships
among humans, humanoid robots, and agents.
As agents and robots have different embodiments,
the amount of potency (i.e., perceived extroversion,
perceived self-confidence, and presence) from them
is different. Furthermore, their different embodiments
may affect not only their potency but also their social
presence. In other words, robots and agents would
affect our behavior or relationship with other humans
*
http://www.oit.ac.jp/is/~koda/hiserver01/profile-e.html
(de Greef et al. 2001). Daher et al. tackled this issue
by using two agents, namely, a priming agent and a
primed agent for the experiment. They examined the
impact of priming on the perceived social presence of
the primed agent judged by human participants. Their
result indicated that the priming by the agent affected
the human perception of the social presence of the
primed agent (Daher et al. 2017).
Researchers in human-agent interactions and
human-robot interactions have reported people's
different behaviors and attitudes to collocated robots,
remote robots projected on the display, and virtual
agents that performed the same task. Some
researchers report that they evaluated robots to be
more social, reliable, and competent than a virtual
agent in a mutual task (Pan et al. 2016, Powers et al.
2007), while such difference was not found in a
simple greeting interaction (Bainbridge et al. 2008).
Another research showed that an embodied robot is
more reliable than a robot projected on the display
(Kiesler et al., 2008). Therefore, it is necessary to
verify Dahers' findings by using other embodiments,
i.e., collocated robots, instead of virtual agents.
The purpose of this study is to verify whether the
embodiment of the priming agent affects the social
presence of the primed agent. We will follow the
266
Koda, T. and Kikuzawa, K.
Effects of Agents’ Embodiment and Robot Anxiety Scale on Social Priming.
DOI: 10.5220/0009144202660271
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 1, pages 266-271
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

experimental procedure of Daher et al. 2017 and add
a humanoid robot to the priming side.
2 EXPERIMENT
2.1 Hypothesis and Experimental
Conditions
From the related research (de Greef et al. 2001, Daher
et al. 2017, Kiesler et al. 2008), we formed the
hypothesis that "the social presence of the primed
agent becomes higher when the embodied robot
primes than when the agent primes." The
experimental conditions are the robot condition
where the robot primes the participant about the
game-playing agent, the agent condition where the
virtual agent (different from the game-playing agent)
primes the participant about the game-playing agent,
and the control condition where there is no priming
before the game. We conducted the experiment as a
between-subject design.
The experiment in this study follows the
procedure in (Daher et al. 2017), where the
participants play two games of twenty questions with
the game-playing agent. Twenty questions is a game
in which one side asks the opponent a question that
should be answered with a yes or no, and then guesses
what the opponent has in mind. Fig. 1 shows the
experimental scene of (Daher et al. 2017). A life-
sized agent (right) gives priming on another agent
(left) that plays twenty questions with the
participants.
Figure 1: Experimental scene of (Daher et al. 2017).
2.2 Experimental Environment
We developed a female agent who plays the game
with the participants and a male agent who performs
priming before the game using Unity5.2.1f1 and C#.
Fig. 2(a) shows the male agent, and Fig. 2(c) shows
the female agent who plays the game. The robot used
for the experiment is CommU, a social conversational
robot made by Vstone Inc. Fig. 2(b) shows the robot's
appearance. We used Java to control the robot
motions and dialogues during the game.
In this experiment, the male agent (shown in Fig.
2(a), priming agent) or the humanoid robot (shown in
Fig. 2(b), priming robot) give priming information to
the participants about the female agent (shown in Fig.
2(c)). The female agent plays the game with the
participants.
The distance between the participant and the
primed agent or the robot was set to 90 cm, which is
defined as an individual distance between
acquaintances by Hall (Hall 1966). Fig. 3(a) shows
the experimental settings under the control condition,
Fig. 3(b) shows the agent condition, and Fig. 3(c)
shows the robot condition.
(a) (b) (c)
Figure 2: The agents and the robot's used in the experiment.
(a) priming agent, (b) priming robot, (c) primed agent
(game-playing agent).
(a) (b) (c)
Figure 3: Three experimental conditions. (a) control
condition, (b) agent condition, (c) robot condition.
2.3 Experimental Procedure
In total, 43 Japanese university students of age group
19 to 24 years (36 men and 7 women) participated in
the experiment. We should consider the participants’
anxiety level towards robots because we use a robot
in the experiment and the existence of the robot might
affect the effect of priming. Therefore, we asked the
participants to answer the questionnaire on robot
anxiety scale (RAS) (Nomura et al. 2006) before we
started the experiment. RAS consists of three
categories, namely, robot’s conversational ability
anxiety (i.e., the robot may not understand complex
stories), robot behavior characteristics anxiety (i.e.,
what kind of behavior the robot performs), robot
Effects of Agents’ Embodiment and Robot Anxiety Scale on Social Priming
267
dialogues anxiety (i.e., whether one's utterance is
understood by the robot). The questionnaire has 11
questions and answers with a 6-point Likert scale.
In cases of robot and agent conditions, the
participants hear a conversation between the robot or
the priming agent and primed agent before they start
a game. The intention of this conversation is to tell
the participants that the priming robot or the agent had
been playing the game with the primed agent just
before the participants' turn and they really enjoyed
the game. When the participant enters the room to
play the game, he sees the priming agent saying, “I
really enjoyed the twenty questions game with you. It
was really interesting and you are very good at
guessing what I had in mind." The priming
conversation lasts about 15 seconds. In the case of the
control condition, the game starts without priming
(thus there is no priming agent or robot situated in the
experimental room as shown in Fig. 3(a)) after the
instruction of the experiment. We conducted the
experiment in a between-subject design, thus each
participant experienced only one condition.
The twenty questions game proceeds as follows.
The participant and the agent select one out of nine
creatures (from a list given during the instruction)
without telling the others. In the first turn, the
participant asks the primed agent questions and the
agent answers with a yes or no, and the participants
guess the animal that the primed agent has in mind.
The roles are reversed in the second turn. The
participant answers the questions from the agent, and
the agent guesses the animal the participant has in
mind. Examples of dialogues with the agent include,
"Is it a four-legged animal?" "Does it swim?" and
"Does it run fast?"
After the twenty questions game, each participant
answers a questionnaire on the social presence of the
primed agent that they have finished playing the game
with. This questionnaire is composed of questions
about the social presence of humans defined in Harms
et al. 2004.
The experimental procedure is as follows:
1) The participants receive instructions about the
experiment and answer the RAS questionnaire.
2) They enter a separate room for the twenty
questions game.
3) Only one of the three conditions is assigned to
each of them: the robot condition, the agent
condition, or the control condition. In case of
conditions for receiving priming (the robot
condition and the agent condition), the
participants hear a conversation between the
priming robot or agent and the primed agent as
they enter the other room. In the control
condition, the participants immediately go to step
4.
4) They play twenty questions game with the game-
playing agent two times.
5) They move to the original room where they were
instructed before the game, and they answer the
questionnaire on the social presence of the game-
playing agent.
2.4 Questionnaires
Answers to the RAS questionnaire were rated with a
6-point scale (1: I do not feel anxious at all – 6: I feel
very anxious). Table 1 shows the questions from the
RAS questionnaire. Because we assume that one’s
anxiety level towards robots would affect the priming
effect from the robot, we divided the participants into
two groups according to their RAS scores. The
average RAS score of the 43 participants was 39.1.
We categorized 20 participants whose scores were
higher than 39.1 as high RAS group and 23
participants whose scores were lower than 39.1 as low
RAS group.
Although we assigned a similar number of
participants to each condition, the number of
participants in the two RAS groups was not even. The
number of participants who were assigned the agent
condition was 14 (high RAS group: 6 participants,
and low RAS group: 8 participants), who were
assigned the robot condition was 14 (high RAS: 4,
low RAS: 10), and who were assigned the control
condition was 15 (high RAS: 10, low RAS: 5).
Table 1: RAS questionnaire (Nomura et al. 2006).
Anxiety toward
Communication
Capability of
Robots
Robots may talk about something irrelevant
during conversation.
Conversation with robots may be
inflexible.
Robots may be unable to understand
complex stories.
Anxiety toward
Behavioral
Characteristics
of Robots.
How robots will act.
What robots will do?
What power robots will have?
What speed robots will move at?
Anxiety toward
Discourse with
Robots
How I should talk with robots.
How I should reply to robots when they talk
to me.
Whether robots understand the contents of
my utterance to them.
I may be unable to understand the
contents of robots’ utterances to me.
The social presence questionnaire was rated on a
7-point scale (1: I do not agree at all – 7: I agree very
much). The questionnaire consists of 6 categories:
Co-Presence (CoP) that measures the sense of being
with the other party, Attentional Allocation (Atn) that
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
268
measures the degree of attention paid to the other
party, Perceived Message Understanding (MsgU) that
measures the degree of understanding of the other
party's thoughts, Perceived Affective Understanding
(Aff) that measures the degree of understanding of the
other party's feeling, Perceived Emotional
Interdependence (Emo) that measures the degree of
being influenced by the other party's feelings, and
Perceived Behavioral Interdependence (Behv) that
measures the degree of being influenced by the other
party's behaviors. Table 2 shows questions from the
social presence questionnaire adopted from Harms et
al. 2004.
Table 2: Excerpted questionnaire on social presence
(Harms et al.2004).
Co-presence
(CoP)
I noticed (my partner). (My partner)
noticed me.
(My partner’s) presence was obvious
to me.
Attentional
Allocation
(Atn)
I was easily distracted from (my
partner) when other things were going
on.
(My partner) was easily distracted
from me when other things were
going on.
Perceived Message
Understanding
(MsgU)
My thoughts were clear to (my
partner).
(My partner’s) thoughts were clear to
me.
Perceived Affective
Understanding
(Aff)
I could tell how (my partner) felt.
(My partner) could tell how I felt.
Perceived Emotional
Interdependence
(Emo)
I was sometimes influenced by (my
partner’s) moods.
(My partner) was sometimes
influenced by my moods.
Perceived
Behavioral
Interdependence
(Behv)
My behavior was often in direct
response to (my partner’s) behavior.
The behavior of (my partner) was
often in direct response to my
behavior.
3 RESULTS
We conducted a one-way ANOVA for the social
presence questionnaire with the priming factor.
Consequently, the main effect was seen in the priming
factor in MsgU (F=4.555, p=<.01). The control
condition was rated significantly higher than the robot
condition. In addition, the main effect was seen in the
priming factors in Emo (F=5.625, p=<.01). The
control and the agent conditions were rated
significantly higher than the robot condition. The
main effects of priming factors were not observed in
the other four social presence categories.
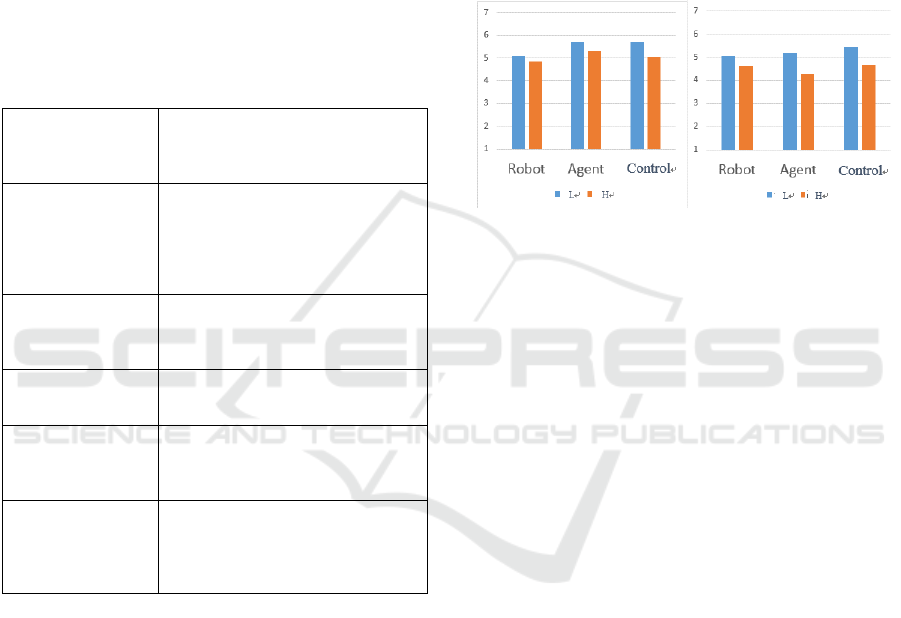
To investigate whether human anxiety against
robots affects the priming effect, we conducted a one-
way ANOVA with the RAS factor. Fig. 4(a) shows
the results of the social presence CoP ratings and Fig.
4(b) shows the results of the Atn ratings by the two
RAS groups. As a result, the main effect was seen in
the RAS factor in the categories CoP (F=4.182,
p=<.05) and Atn (F=9.281, p=<.01). The low RAS
group rated CoP and Atn significantly higher than the
high RAS group. For the other categories, there were
no main effects among the RAS factor.
(a) (b)
Figure 4: (a) CoP and (b) Atn scores made by the two RAS
groups.
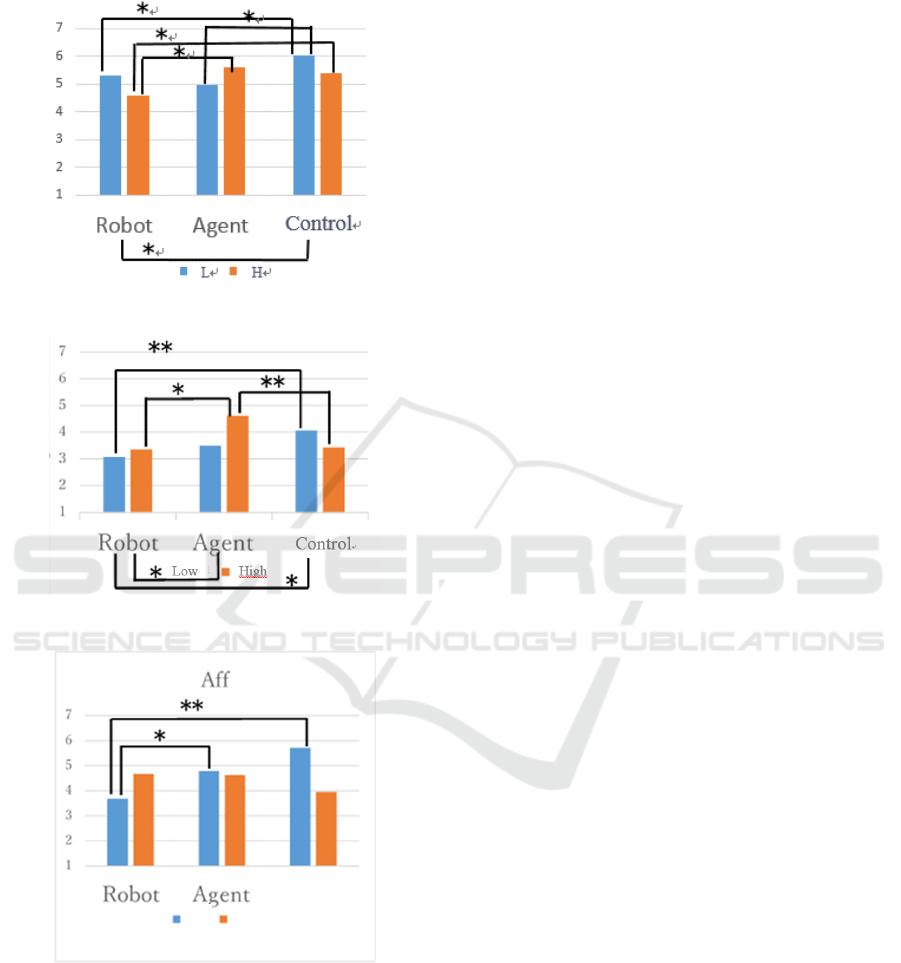
We also conducted a two-factor ANOVA for the
priming factor and the RAS factor. Fig. 5, 6, and 7
show the questionnaire results of MsgU, Emo, and
Aff respectively. As a result, there were significant
interactions between the priming factor and the RAS
factor in MsgU (F=4.389, p=<.01), Aff (F=7.467,
p=<.01), and Emo (F=5.502, p=<.01).
In the low RAS group, they rated MsgU
significantly lower in the robot condition (F=4.553,
p=<.05) and the agent condition (F=4.553, p=<.01)
than in the control condition. They rated Aff
significantly lower in the robot condition than in the
agent condition (F=7.202, p =<.01) and the control
condition (F=7.202, p=<.01). They rated Emo
significantly lower in the robot condition than in the
control condition (F=3.801, p=<.01).
In the high RAS group, they rated MsgU
significantly lower in the robot condition than in the
agent condition (F=3.828, p=<.01) and the control
condition (F=3.828, p=<.05). They rated Emo
significantly lower in the robot condition (F=5.177,
p=<.01) and the control condition (F=5.177, p=<.01)
than in the agent condition. There was no significant
difference between the priming conditions in the
evaluation of the RAS high group in Aff.
In the Behv category, which indicates whether the
behaviors of the primed agent affect the participants,
there were no significant differences in the main
Effects of Agents’ Embodiment and Robot Anxiety Scale on Social Priming
269
effects or interactions on/between priming factor and
RAS factor.
Figure 5: MsgU scores made by the two RAS groups.
Figure 6: Emo scores made by the two RAS groups.
Figure 7: Aff scores made by the two RAS groups.
In summary, the main effects of the priming factor
were seen in MsgU and Emo. The embodiment on the
priming side affected a part of the social presence of
the primed agent. However, contrary to the
hypothesis, evaluations of the social presence of the
primed agent became significantly higher when there
was no priming and no physical embodiment on the
priming side. Moreover, CoP and Atn showed the main
effects of the RAS factor. The low RAS group rated the
above categories as significantly higher than the high
RAS group.
In terms of interactions between the priming factor
and the RAS factor, the low RAS group rated the robot
condition as the lowest and the control condition as the
highest in MsgU, Emo, and Aff categories, while the
high RAS group rated the control condition and the
agent condition as significantly higher than the robot
condition in the above categories.
4 DISCUSSION
The embodiment on the priming side affected two
categories in the social presence of the primed agent.
There were no significant differences in the other
social presence categories among the priming
conditions. The hypothesis that "the social presence of
the primed agent becomes higher when the embodied
robot primes than when the agent primes" was not
supported. On the contrary, the social presence of the
primed agent was perceived lower when the robot
primed than when the virtual agent did and when there
was no priming. We interpret the reason for this result
as follows: 1) the experimental environment where the
embodied robot interacted with the virtual agent
emphasized the different embodiments of the robot and
the agent, 2) the robot size is 307(H) ×180(W) ×130(D)
mm, and it is smaller than the agent, which is displayed
on the 40 inch screen. 3) Thus, it decreased the
believability and credibility of the robot and the game
environment itself where the robot and the agent play
the twenty questions game.
CoP and Atn ratings showed the main effects
between the RAS groups. The above scores were rated
significantly higher in the low RAS group than the high
RAS group. This result suggests that we can apply the
high RAS group's negative and anxious attitude toward
robots to the virtual agent.
The interactions between the priming factor and the
RAS factor in MsgU, Emo, and Aff indicate that there
is a tendency that the low RAS group rated the robot
condition as the lowest and the control condition as the
highest in the above categories, while the high RAS
group rated the control condition and the agent
condition as significantly higher than the robot
condition.
We interpret these results as follows: The low RAS
group can perceive high social presence of the game-
playing agent without any priming, because of their
nature of having low anxiety toward robots. They
perceived the unnaturalness of the experimental
Control
L
H
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
270

environment where the robot played the twenty
questions game with the virtual agent and have
opinions about it. Thus, their ratings in the categories
of MsgU, Emo, and Aff, which measure one's effort to
understand the other party's thoughts, feelings, and
moods, decreased. In other words, priming by the robot
resulted in decrease of the social presence of the game
playing agent for the low RAS group.
The high RAS group has high anxiety against
robots. This might have led to their low social presence
ratings in the robot condition. However, their social
presence ratings of the game-playing agent were as
high as the ones in the control condition or even higher.
Thus, they perceived higher social presence from the
game-playing agent when the other agent gave priming
information.
In summary, the overall results suggest that the
social presence of the primed agent becomes higher
when the other agent performs the priming for the high
RAS group, while the social presence of the primed
agent becomes lower when the robot performs the
priming for the low RAS group. One of the limitations
of this experiment is that the number of participants
assigned to each condition and RAS group is not even
and there are a limited number of participants. Further
experiment should gather a larger number of
participants.
In terms of other limitations, further research
should use a life-sized agent and robot. Daher et al.
2017 used a life-sized agent for the priming agent, and
they implemented an animation of it leaving the spot
soon after it gave the priming information to the
participant. The robot and agent used in this
experiment were not life-sized, and we did not
implement animations such as leaving the place;
therefore, the actual perceived presence of the robot or
agents was lower than the experimental setting in
Daher et al. 2017. Hence, there is a possibility that the
priming effect would be more noticeable if life-sized
robot and agents were used. Moreover, the
embodiment of the primed side should be considered
in a further experiment. This experiment used a virtual
agent for the primed side, but a further experiment
should switch the primed side from the agent to the
robot.
5 CONCLUSION
This research investigated the effect of embodiment of
the priming agent on the perception of social presence
of the primed agent. The preliminary results did not
support our hypothesis that "the social presence of the
primed agent becomes higher when the embodied
robot primes than when the virtual agent primes."
However, the results indicated that there is a dichotomy
in the perceived social presence between the
participants' groups when we divide them according to
their anxiety level toward robots. This indicates that the
priming effect on the social presence of the primed
agent is different depending on the embodiment of the
priming agent and people's anxiety toward robots.
Thus, we should consider the effects of the
embodiment of the agent and people's attitude toward
robots on the social presence of agents.
ACKNOWLEDGEMENTS
This research was partially supported by JSPS
KAKENHI, JP17K00287.
REFERENCES
Bainbridge, W. A., Hart, J., Kim, E. S., & Scassellati, B.,
2008. The effect of presence on human-robot interaction.
In Robot and Human Interactive Communication, (RO-
MAN2008), 701-706.
Bargh, J.A., Chen, M., and Burrows, L., 1996. Automaticity
of social behavior: Direct effects of trait construct and
stereotype activation on action. Journal of Personality
and Social Psychology 71(2), 230-244.
Daher, S., Kim, K., Lee, M., Schubert, R., Bruder, G.,
Bailenson, J., and Welch, G., 2017. Effects of Social
Priming on Social Presence with Intelligent Virtual
Agents. In Proc. of Intelligent Virtual Agents 2017, 87-
100.
de Greef, P., and IJsselsteijn, W. A., 2001. Social presence in
a home tele-application. Cyber Psychology and Behavior
4, 307-315.
Hall, E.T., 1966. The hidden dimension, Doubleday and
Company.
Harms, C., Biocca, F., 2004. Internal consistency and
reliability of the networked minds measure of social
presence: Seventh Annual International Workshop:
Presence 2004.
Kiesler, S., Powers, A., 2008. Anthropomorphic interactions
with a robot and robot-like agent. Social Cognition. 26,
169-181. doi:10.1521/soco.2008.26.2.169.
Nomura, T., Suzuki,T., Kanda, T., and Kato, K., 2006.
Measurement of anxiety toward robots. In Proc.
IEEE Int.
Symp. Robot and Human Interactive Communication,
pp.372–377.
Pan, Y. and Steed, A., 2016. A comparison of avatar, video,
and robot-mediated interaction on users’ trust in
expertise. Frontiers in Robotics and AI 3, 12.
Powers, A., Kiesler, S., Fussell, S., and Torrey, C., 2007.
Comparing a computer agent with a humanoid robot. In
Proceedings of Human-Robot Interaction (HRI2007),
145-152.
Effects of Agents’ Embodiment and Robot Anxiety Scale on Social Priming
271
