
Self-organized Cognitive Algebraic Neural Network
Prabir Sen
a
Statgraf Research, Canada
Keywords: Artificial Intelligence, Cognitive Computation, Deep Neural Network, Decision Science, Network Science.
Abstract: This paper refers to author’s patented invention that introduces a more efficient statistical (machine)
learning method. Inspired by neuroscience, the paper combines the synaptic networks and graphs of quantum
network to constitute interactions as information flow. Hitherto, several machine learning algorithms had
some influence in business decision-making under uncertainty, however the dynamic cognitive states and
differences thereof, at different timepoints, play an important role in transactional businesses to derive choice
and choice-sets for decision-making at societal scale. In addition, deep neural functions that reflect the
direction of information flow, the cliques and cavities, necessitate a new computational framework and deeper
learning method. This paper introduces a proactive-retroactive learning technique - a quantified measurement
of a multi-layered-multi-dimensional architecture based on a Self-Organized Cognitive Algebraic Neural
Network (SCANN) integrated with Voronoi geometry – to deduce the optimal (cognitive) state, action,
response and reward (pay-off) in more realistic imperfect and incomplete information conditions. This
quantified measurement of SCANN produced an efficient and optimal learning results for individuals’
transactional activities and for nearest-neighbor, as a group, for which the individual is a member. This paper
also discusses and characterizes SCANN for those who handle decisions under conditions of uncertainty,
juxtaposed between human and machine intelligence.
1 INTRODUCTION
Human decision making routinely involves choice
among temporally extended courses of action,
response and reward, as pay-off, over a broad range
of time scales depending on cognitive state. Consider
a traveler deciding to undertake a journey to a distant
city for work. To decide – go-no-go – the end-benefits
in terms of reward, as pay-off, of the trip must be
weighed against the cost. Having decided to go,
choices must be made at each fragmented “smaller”
decision e.g., whether the work is worth paying or
not, whether to fly or to drive, whether arrange a local
accommodation or stay with friends or relatives. With
the brute force of computational processes and the
better understanding of human intelligence – how
individuals go about solving their problem – some of
the existing learning technologies may train machines
for the outcome. Here one would like to make a
distinction between precision engineering and
intelligence. One of the fundamental principles in
precision engineering is that of determinism where
systemic behavior is fully predictable, even to an
a
https://orcid.org/0000-0001-6436-5998
individual’s, or atomic-scale, activities. To do the job
efficiently and correctly, one needs models and
algorithms, where the basic idea is that machine
follows a set of rules, cause and effect relationships,
that are within human ability to understand and
control and that there is nothing random or
probabilistic about their behavior. Further, the
causalities are not esoteric and uncontrollable, but can
be explained in terms of familiar and precise
engineering principles. Intelligence, on the other
hand, as opposed to fact, is stochastic in nature. It
finds optimal solutions, derives reasons, infers
actions, recognizes patterns, comprehends ideas,
solves problems and uses language to communicate,
from (im)perfect and (in)complete information
conditions.
However, some learning methods, where the
result is the final reward or pay-off, are awfully hard
to untangle the future information to foresee the
sequence of actions that will benefit the user at some
point in future. Some of these infrequent and delayed
rewards or learnings limit decisions making process
(Edward, Isbell, Takanishi, 2016). For some
836
Sen, P.
Self-organized Cognitive Algebraic Neural Network.
DOI: 10.5220/0009141408360845
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 2, pages 836-845
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

combinatorial problems, where all rules and
information are known to all parties, one may set up
intermediate positions for them to achieve the optimal
results where, as in real-life conditions, such learning
success depends on how well one would fragment a
“major” decision or an objective into a series of
multiple “smaller” decisions – the decision journey –
and actions to measure their progress accurately.
Unlike many statistical (machine) learning
techniques, this approach has yielded both
unreliability in the training process, and a general lack
of understanding as to how the learning model
converge, and if so, to what (Barnett 2018).
2 PROACTIVE-RETROACTIVE
Most humans or species do not learn by rote or by
reinforcing the subject into the memory. In fact, the
growth and maturation of a child’s brain is an
intricate process taking decades, in which the brain
grows and adapts to the surrounding world (Aamodt,
and Wang, 2008). The same research has shown that
the developing brain has been shaped by thousands of
generations of evolution to become the most
sophisticated information-processing machine on
earth. And, even more amazingly, it builds itself. The
way the information is processed can be termed as
dynamic proactive-retroactive learning wherein a
human (or a system) proactively learn, either through
instructions or through observations, and then waits
for some kind of confirmation – either from nearest-
neighbor or trusted source – which retroactively
reinforce or modify in accordance with the subject
matter. For example, when a child learns “A for
Apple, B for Boy and C for Cat” from a book, he or
she registers only an image of an apple, a boy or a cat.
These images are retained in memory until, some
point in future, when he or she physically observes
the contextual appearance – new information that
connects the dots – of an apple, or a boy or a cat, and
confirmed by a trusted source, often parents, with the
text – the name – associated with those physical
images. Even most adult brains follow the same
principle when they observe something new. At the
time of observation, they retain this new information
in their memory as postulations – “may be this is a
peach” (language text) or “may be the boy is playful”
(causal reasoning) or “may be this is Mr. Smith”
(personality), until their postulations are confirmed
by a trusted source, often in the nearest-neighbor.
These observations and confirmations happen in two
different time-points. And, sometimes the observed
postulations are radically altered with the
confirmation of new information – “oh no, this is an
apricot, not peach” (language text) or “no, the boy is
sarcastic, not playful” (causal reasoning) or “ah, this
is Mr. David, not Mr. Smith” (personality) – at the
time of confirmation. In this learning process, the
former is proactive learning whereas, the latter –
retroactive learning – changes the original
postulations or replaces the deep-seated beliefs
through new information connections, often either
guided by experience or information from the
nearest-neighbor or both (Sen, 2017).
So, what happens to state of the information
between proactive and retroactive – two different
time points – in the learning cycle? The neuroscience
research has shown that in early childhood, and again
in the teens and subsequently at various stages of
learning, brains go through bursts of refinement,
forming and then optimizing the connections in the
brain. Connections determine what the subject or
object is, what does it do, and how does it do. Early
childhood provides an incredible window of
opportunity with neural connections forming and
being refined at such an incredible rate, there isn’t a
certain time when babies are learning – they are
always learning. Every moment, each experience
translates into physical trace, a part of the brain’s
growing network (Bachleda and Thompson, 2018),
One of the most powerful set of findings concerned
with the learning process involves the brain’s
remarkable properties of “plasticity” – to adapt, to
grow in relation to experienced needs and practice,
and to prune itself when parts become unnecessary –
which continues throughout the lifespan, including
far further into old age than had previously been
imagined (Skoe and Kraus (2012). The demands
made on the human learning are key to the plasticity
– the more one learns, the more one can learn – and,
therefore required to be included in this architecture
of artificial neural network for machine learning.
3 NEURAL NETWORK WITH
VORONOI REGION
An effective method for designing neural network
that derives the stages in-between proactive and
retroactive learning in two different time points is to
classify patterns in the multi-dimensional feature
space. This deep learning architecture introduces a
multi-dimensional feature space where the
information waits in certain workspace – the Voronoi
region – within the neural network based on distance
to points in a specific subset of the plane. The
Self-organized Cognitive Algebraic Neural Network
837

Voronoi diagram is derived over points in feature
space which represents teachers’ input in order to
realize the desired classification. However, to reduce
the size of the neural network and make the learning
efficient, clustering procedure that enables the
subject to manage a number of teachers in a lump is
implemented (Kenji, Masakazu and Shigeru, 1999).
Our approaches, however, only utilize point-wise
cell-membership – as new information – by means of
nearest-neighbor queries and do not utilize further
geometric information about Voronoi cells since the
computation of Voronoi diagrams is prohibitively
expensive in high dimensions. Therefore, a Monte-
Carlo-Markov-Chain integration-based approach
(Polianskii and Pokorny, 2019) that computes a
weighted integral over the boundaries of Voronoi
cells, thus incorporates additional information – as
retroactive confirmation – about the Voronoi cell
structure is established. This dynamic proactive-
retroactive learning method predicts and prescribes
an action in “expected” response to an activity of
human (or interchangeably a machine), depending on
individual’s state, for one or more end-rewards, or
pay-offs at a given point in time.
Since most information related to immediate
relevance including dynamic active cognitive state
and/or active experiences, hence individuals apply a
certain set of rules that are associated with either
sequential monadic (e.g., individual’s state from a to
𝑎́ as self-improvement) or paired-comparison (e.g.,
individual’s state x compared with another
individual’s state y) with nearest neighbor or a group
where individual is a member. This, in imperfect or
asymmetric and incomplete information conditions,
creates “hidden” multi-layered combinations on
multi-dimensions – functional, non-functional, non-
discriminating and discriminating – features to
predict and determine the cognitive state (or “state”).
The group, where individual is a member, may also
apply a certain set of collective “hidden” information
associated with either linear-non-linear (e.g., a race-
car driver uses wind direction data while cornering at
speeds more than 200 mph without informing the
opponent) or paired comparison (e.g. race car the
team analyzes data of other racers’ degradation rates
on the tires and of the health of various mechanical
components, and recording the drivers’ steering,
braking and throttle inputs). In imperfect and
incomplete information conditions, this generates
aggregated “hidden” multi-layered combinations on
multi-dimensions features to predict and determine a
collective state. For example, a trading system
analyzes data to predict if the state of any trading
stock and its change with new features, conditions
and functions – the underlying latent variables –
affect the price, as an outcome, in the marketplace.
The hypotheses here are that the dynamic
proactive-retroactive learning method would derive
to be a better prediction on the individual’s current
action for future reward, as final pay-off, over a
broad range of time and information scales, including
(im)perfect and (in)complete information conditions.
For example, if the trading system predicts that the
state of the product (or service) and its change with
the underlying latent variables affect price in the
marketplace, then the expected response of the buyer
may also likely to change (either to buy immediately
or defer for the future price), thus may create a
different reward or pay-off outcome (revenue or
saving for the trader).
4 TRAINING DATA
A self-organized learning method, in accordance with
the dynamic proactive-retroactive learning method is
executed to segment a graph network data based on
bounded diffusion of collective individual
information interactions. The nearest-neighbor or
group data is determined from grouping of individual
transactional data for a group where individual is a
member. After a certain upper-bound number of
groups, the system applies a diffusion-limited
aggregation (“DLA”) – a formation process whereby
individuals in a group, as particles, and their signals
– defined as change or the first derivative in an
individual’s data – of a subject matter undergo a
stochastic process for clustering together to different
aggregates (“clusters”) of such individuals. These
signals and their changes – defined as the second
derivative in an individual’s data – are used for
predicting the group’s current state, as described
above, and applied sheafing method, (or group
theory) for “grouping” mechanism (Tennison, 2011)
– depending on the geometry of the growth, for
example, whether it be from a single point radially
outward or from a plane or line – of clusters where
the individual is a member, to determine the state.
The self-organized learning method presents
individual’s data, for example, as stimulus, at some
time t=0 and then presenting a response data at a
variable time post stimulus on the group. The
bounded diffusion in DLA, for example, may have
one additional parameter, the position of the decision
bound, say A. If at time t of the state data of the
individual (or subject matter e.g., search for an item)
is x, the distribution of the state at a future time may
be s > t, hence the term “forward” diffusion. The
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
838
backward diffusion, on the other hand, may be useful
when the individual at a future time s has a particular
behavior due to past decision, the distribution at time
is t < s. This may impose a terminal condition, which
is integrated backward in time, from s to t (hence the
term “backward” is associated with this). Let g(x) be
a bounded smooth (twice continuously differentiable
having compact support) function, and let:
𝑢
(
𝑡,𝑥
)
=𝐸
,
(𝑔𝑋
(
𝑇
)
≡𝐸(𝑔𝑋
(
𝑇
)
|𝑋
(
𝑇
)
=𝑥
(1)
with the “terminal” condition u(T, x) = g(x). In
addition, if X(t) has a density p(t, x), then for a
probability density function μ(·), the probability
densities satisfy the:
𝜕
𝜕𝑡
𝑝
(
𝑡,𝑥
)
=(𝐴
∗
𝑝)(𝑡,𝑥)
(2)
where A* is the adjoint operator of A, defined as:
𝐴
∗
𝑣
(
𝑡,𝑦
)
=−
𝜕
𝜕𝑦
𝑏
(
𝑦
)
𝑣
(
𝑡,𝑦
)
1
2
𝜕
𝜕𝑦
(𝜎
(
𝑦
)
𝑣(𝑡,𝑦)
(3)
This behavior may be described as fractal growth,
as frequently observed in plants like ferns. The
clusters may include formulating a group associated
with the group’s current activity as well as the
nearest-neighbor for the individual where individual
is a member.
These state data of individual are used to predict
the group’s current action where the individual is a
member, to determine the choice clusters of likely
action. The action data are further used to predict the
group’s expected response to formulate choice
clusters of likely response. And, finally, these
response data are used to predict the group’s reward
or pay-offs to derive choice clusters of the reward or
pay-off in their decision journey.
5 COGNITIVE ALGEBRAIC
NEURAL NETWORK
A multi-layered multi-dimensional Self-Organized
Cognitive Algebraic Neural Network (“SCANN”)
learning method is formulated, in accordance with
the dynamic proactive-retroactive learning method
and self-organized learning method. This is required
to arrange information and determine undefined rules
based on a cognitive structure for the individual (or
the subject matter). This may include choices and
maximum likelihood estimation of each choice for
the activity of the individual. A set of data in activity,
for example, is determined for each individual (n) and
more individuals are added to the activity content that
form choices and different choice sets. The features
(or attributes) of these choices and choice-sets may or
may not be causal factors that influence a choice. A
choice set attribute may comprise one or more
attributes, for example, of the item such as
combination of sensory attributes, (taste, looks, etc.),
rational (price, ingredients, etc.) and emotional (feel
good, lifestyle, etc.). In the formation of a group with
different clusters, based on activity and/or factors
thereof, each choice set becomes a function of
activity and interactions within a group, where the
individual is a member. One or more common
contact individual and/or individual’s activity content
between individuals may exist in a group. Further,
this indicates a “hub” contact with “cross” features
and attributes for individual and/or individual’s
activity content between individuals in a group, thus
forms a graph structure of the network.
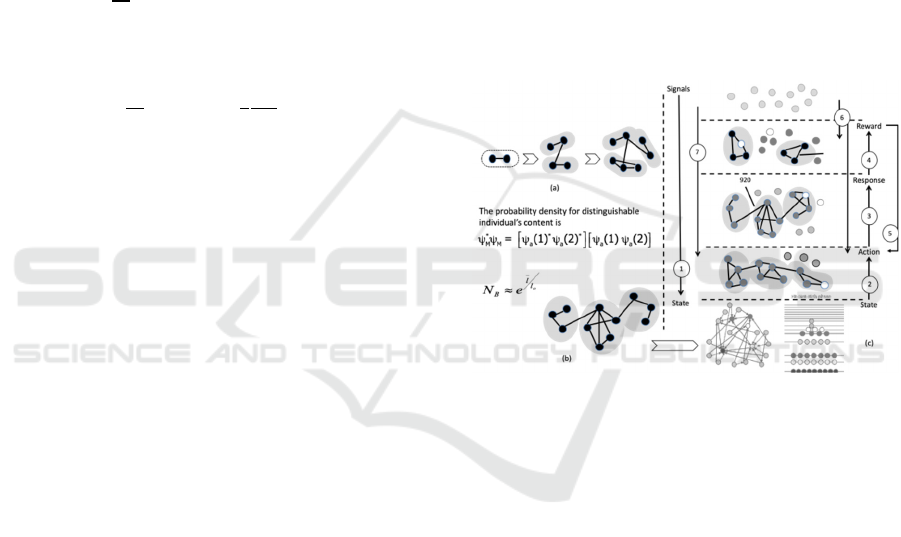
Figure 1: Multi-Layered Multi-dimensional Self-Organized
Cognitive Algebraic Neural Network (SCANN).
The graph structure of the SCANN is a pair (N,
g), where g is a network on the set of nodes N. A
relationship between two nodes i and j, represented
by 𝑖𝑗 ∈ 𝑔, is referred to as a link or edge. Thus, g
will sometimes be an 𝑛 × 𝑛 adjacency matrix, with
entry 𝑔
denoting whether i is linked to j and may
also include the intensity of that relationship. The
neighbors of a node i in a network (N, g) are denoted
by N
i
(g). The degree of a node i in a network (N, g)
is the number of neighbors that i has in the network,
so that 𝑑
(g) =
|
𝑁
(g)
|
. Many naturally occurring
multi-layered multi-dimensional networks (Erdös,
and Renyi, 1960), as represented in this Fig 1,
explicitly incorporate multiple channels of
connectivity and constitute the natural environment
to describe systems interconnected through different
categories of connections: each activity content
module (signals, states, actions, responses and
rewards) may be represented by a layer and the same
Self-organized Cognitive Algebraic Neural Network
839

node or entity may have different kinds of
interactions (set of nearest-neighbors in each layer).
The latent feature structure, as depicted in Fig. 1
above, is abstracted from variables to render
microstate probabilities of each (dis)satisfied
individual’s choice-set attributes and latent causal
variables, accessible by mere combinatorial,
(im)perfect and (in)complete information conditions
much in the same way as graph probabilities, become
accessible in random graph. At an atomic level, for
each individual, the structure finds the optimal
choice-set of latent variables that has causal effect on
the expected outcome or reward or pay-off (Sen,
2015). The interaction variables that are available for
individuals to exercise preference, or any variable
involving an interaction of the individual for a good
or service. The coefficients are predetermined and
represented a diminishing level of satisfaction, for
example, over time. In addition, the latent learning
represents that, in cognitive decision, despite their
non-equilibrium and irreversible nature, the evolving
network is mapped into an equilibrium Bose-Einstein
(“BE”) condensation nodes corresponding to energy
levels, and links representing the individual’s activity
contents, as particles (Bianconi and Barabási, 2001).
The existence of a state transition, phase to a BE
condensate, the outcome distribution g
(
ϵ
)
= C ∈
where 𝜃 is a free parameter and the energies were
chosen from ϵ ∈ (0, 𝜖
) with normalization
C= 𝜃+ 1/(𝜖
). For this class of distributions, the
cognitive state for a Bose condensation is determined
as:
𝜃+1
(𝛽𝜖
)
𝑑𝑥
𝑥
𝑒
−1
()
<1
(4)
The active strand of the study in this direction is
to study individualized ensembles with fixed degree
sequences, or degree distributions following, for
instance, a power-law. This is the probability that a
randomly chosen node in the network has exactly 𝑙
links, is proportional to 𝑙
for some y .
The choices for individuals (or interchangeably
machines) in N have action spaces A
i
. Let A =
𝐴
,…𝐴
at every stage in their decision journey. In
this, the action spaces are finite sets or subsets of a
Hilbert space. Generally, decision making is not
necessarily associated with a choice of just one action
among several simple given options, but it involved
a choice between several complex options for
actions. The elementary prospect (e
n
) is the
conjunction of the chosen modes, one for each action
from the intended action. To each elementary
prospect e
n
, there corresponds the basic state
|
𝑒
⟩
,
which is a complex function 𝐴
→ 𝐶, and its
Hermitian conjugate
⟨
𝑒
|
. The structure of a basic
state is
⟨
𝑒
𝑛
|
=⨂
𝑖=1
𝑁
|
𝐴
𝑖𝑣
𝑖
(5)
The cognitive or mind space is the closed linear
envelope
𝑀≡span
{
|
𝑒
⟩
}
=
𝑁
⨂
𝑖=1
𝑀
(6)
To each prospect πj, there corresponds a state
𝜋
∈ 𝑀 that is a member of the mind space.
𝜋
=
∑
𝑎
|
𝑒
⟩
. This applies a quantum decision
theory as an intrinsically probabilistic procedure. The
first step consists in evaluating, consciously and/or
subconsciously, the probabilities of choosing
different prospects from the point of view of their
usefulness and/or appeal to the choosing agent. If the
mapping from a state parameter w to the conditional
probability density p(y|x, w) is one-to-one, then the
model is identifiable, i.e. if the product in service is
in its lowest state then the likelihood of that product
to fail is significantly high. Otherwise, it is non-
identifiable. In other words, this model is identifiable
if and only if its parameter is uniquely determined
from its state and/or cognitive behavior.
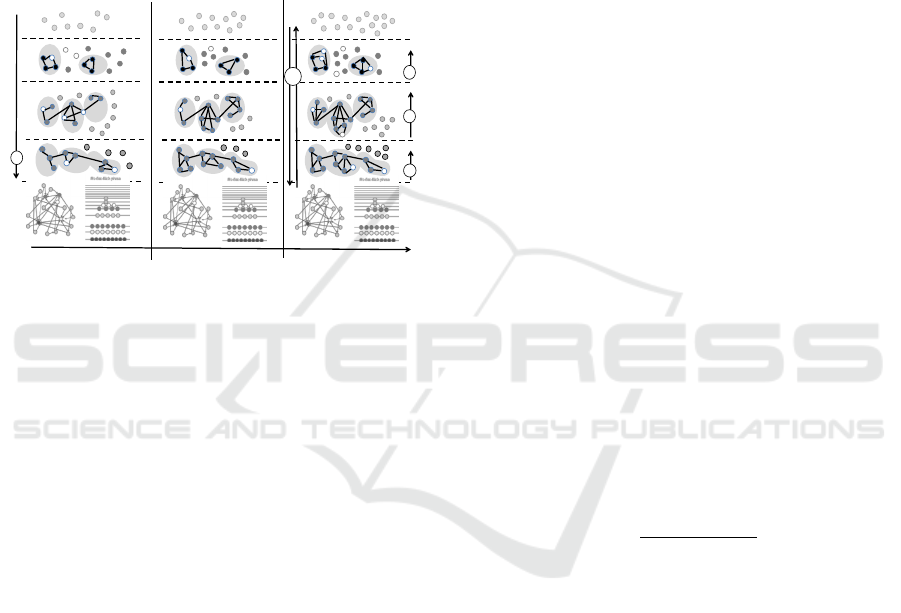
However, in non-identifiable cases, as depicted in
Fig. 1, actions are more dynamic and remain in active
workspace of the individual as they “wait” – the
Voronoi region – for more signals in transactional
data to make the connection for action (best matching
nearest-neighborhood action cells). For these non-
identifiable cases of actions, a new set of information
is required, as new cell, ∁ , and a local counter
variable 𝜏
∁
that constrains the number of input
signals for which the action has best-matching unit
(Fukushima, 2013). Further, introduction of a new
signal data, as a new cell, ∁, with a local counter
variable 𝜏
∁
and since the cells are slightly moving
around, more recent signals may be weighted
stronger than previous ones. An adaptation step, for
example, may be formulated as: a) choose an input
signal data according to the probability distribution
𝑃(𝜉), b) locate the best matching unit 𝑐=∅
(
𝜉
)
; c)
increase matching for 𝑐 and its direct topological
neighbors ∆𝑤
=𝜀
(𝜉− 𝑤
) ; d) Increment the
signal counter of 𝑐, as new signal data gets added,
either via another activity, e.g., a call from a friend,
or an ‘autonomous’ message: “how about going out
for lunch” : ∆𝜏
=1; e) decrease all signal counters
by a fraction 𝛼 : ∆𝜏
∁
=−𝛼𝜏
∁
(not shown in the
diagram) which is uniquely determines the change in
action due to new signal data that influenced its state
),2( ∝∈
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
840
and/or cognitive behavior. The relative signal
frequency of a cell ∁ is: ℎ
=𝜏
/
∑
𝜏
∈
. A high
value of ℎ
, therefore, indicates a good position to
insert a new latent variable, as cell, because the new
latent variable, cell, is likely to reduce this high value
of action to a certain degree. The insertion of new
cells leads to a new Voronoi region, F, in the input
space. At the same time, the Voronoi regions of the
topological neighbors of ∁ are diminished. This
change is reflected by an according redistribution of
the counter variables 𝜏
∁
.
Figure 2: Self-Organized Cognitive Algebraic Neural
Network (SCANN) With Voronoi Region.
There are also many conditions where the
individual and/or individuals in a group choose
actions without fully knowing with whom they will
interact and what would be their response. Instead of
a fixed network, individuals are now unsure about the
network that will be in place in the future, but have
some idea of the number of interactions that they will
have. To fix ideas, the individual and/or a group
where individual is a member and their action data
may choose to find expected response that is only
useful in interactions with other individuals who has
the same product as well, but without being sure of
with whom one will interact in the future. In
particular, the set of individuals N is fixed, but the
network (N; g) is unknown when individuals choose
their actions. An individual i knows his or her own
degree d
i
, when choosing an action, but does not yet
know the realized network. Individuals choose
actions in {0,1}, individual i has a cost of choosing
action
1
, denoted c
i
. Individual i’s payoff from action
1
when i has d
i
neighbors and expects them each
independently to choose 1 with a probability x is:
𝑣
(
𝑑
,𝑥
)
−𝑐
and so action
1
is an expected response
for individual i if and only if 𝑐
≤ 𝑣(𝑑
,𝑥). The
payoff to the individual from taking action
1
compared
to action
0
depends on the number of neighbors who
choose action
1
, so that
𝑠𝑖𝑔𝑛
𝑢
1,𝑎
(
g
)
−𝑢
0,𝑎
(
g
)
=
𝑠𝑖𝑔𝑛
∑
𝑎
∈
(
g
)
−
∑
1−𝑎
∈
(
g
)
(7)
If more than one half of i's neighbors choose
action
1
, for example, then it is best for individual i to
choose 1, and if fewer than one half of i’s neighbors
choose action
1
then it is best for individual i to choose
action
0
. There may be multiple equilibria in this
situation. In non-identifiable cases of expected
response may be dynamic and/or in active workspace,
as the expected response data of the individual
“wait” for more signal data or action data to make
connection for expected response or lack of
confidence (best matching neighborhood action cells)
on the existing signal data. The prospect probability
may be defined as: 𝑝𝜋
,𝜏=Τ𝑟
(
𝜏
)
𝑃
(𝜋
).
The interaction of the decision maker with the group
may ensure that the individual keeps distinct identity
and personality while, at the same time, possibly
changing state of mind. In other words, the
surrounding group does influence the individual’s
state, but does so in a way that does not suppress the
person making own decisions. This corresponds to
the behavior of a subsystem that is part of a larger
system that changes the subsystem properties, while
the subsystem is not destroyed and retains its typical
features.
Introduction of a new signal data, as in Fig 2, or
action data as a “new” cell, ∁, with a local counter
variable 𝜏
∁
and since the cells are slightly moving
around, more recent signals may be weighted
stronger than previous ones. Here, the changes of the
signal and action counters as redistribution of the
counter variables may be seen as ascribing to the new
cell. This new cell is connected to the existing
expected response cells in such a way that may again
a structure consisting only of k-dimensional
simplices:
∆𝜏
∁
=
𝐹
∁
−𝐹
∁
𝐹
∁
(8)
A new Voronoi region exists now. As much input
signals and/or actions as it would have received if it
had existed since the beginning of the process. In the
same way the reduction of the counter variables of its
neighbors may be motivated by making more
information available to all. In such network
interactions the possible outcomes of the D and C to
two basis vectors
|
𝐷
⟩
and
|
𝐶
⟩
in the space of a two-
state condition, e.g., either coffee (A) or juice (B), the
state of the situation may be described by a vector in
the product space which could be spanned by the
basis
|
𝐶𝐶
⟩
,
|
𝐶𝐷
⟩
,
|
𝐷𝐶
⟩
and
|
𝐷𝐷
⟩
, where the first and
second entries refer to A’s and B’s states,
respectively. This may denote the responses initial
state by
|
𝜓
⟩
= 𝐽
|
𝐶𝐶
⟩
, where 𝐽
is a unitary operator
which may be known to both individuals. For fair
response, 𝐽
must be symmetric with respect to the
Reward
Response
Action
State
2
3
4
Time Horizon
6
State
Signals
1
Self-organized Cognitive Algebraic Neural Network
841

interchange of the two individuals. The strategies are
executed on the distributed pair of state situations in
the state
|
𝜓
⟩
. Strategic moves of two individuals,
for example, A and B are associated with unitary
operators 𝑈
and 𝑈
, respectively, which are chosen
from a strategic space S. The independence of the
individuals dictates that 𝑈
and 𝑈
operate
exclusively on the states in A’s and B’s possession,
respectively. The strategic space S may therefore be
identified with some subset of the group of unitary 2
x 2 matrices. Having executed their moves, which
leaves the situation in a state 𝑈
⨂𝑈
𝐽
|
𝐶𝐶
⟩
, A and
B forward their states for the final measurement
which determines their payoff. The only strategic
notion of a payoff may be the expected payoff. A’s
expected payoff may be given by
$
=𝑟𝑃
+𝑝𝑃
+𝑡𝑃
+𝑠𝑃
(9)
where 𝑃
=
⟨
𝜎𝜎′𝜓
is the joint probability
that the channels 𝜎 and 𝜎′. A’s expected payoff $
A
not only depends on her choice of strategy 𝑈
, but
also on B’s choice 𝑈
.
Individual i’s reward or payoff function may be
denoted u
i
: 𝐴× 𝐺(𝑁) → ℝ. A given individual's
payoff depends on the group where the individual is
a member or other individuals' actions, but only on
those to whom the individual is (directly) linked in
the network. In fact, without loss of generality the
network may be taken to indicate the payoff
interactions in the group. More formally, individual’s
payoff may depend on a
i
and {𝑎
}
∈
(g)
so that for
any i, a
i
, and g: 𝑢
(𝑎
,a
,g) = 𝑢
(𝑎
,á
,g) whenever
a
= á
for all 𝑗 𝜖 𝑁
(g). Unless otherwise indicated
the equilibrium, may be a pure strategy Nash
equilibrium: a profile of actions a ∈ 𝐴 = 𝐴
×
…𝐴
, such that 𝑢
(𝑎
,a
,g) ≥ 𝑢
(𝑎
́ ,a
,g) for all
𝑎́
∈𝐴
. In the case with large fluctuations in input of
expected response with large-scale networks,
however, the weights increase without limits due to
the diffusion effect if weight constraints are absent.
Nevertheless, the choice probability of a network
with diverging weights asymptotically approaches
matching behavior. A weight-normalization
constraint may be imposed for the diffusion effect to
become more evident than in cases without
normalization.
However, in non-identifiable cases of reward
may be in dynamic and/or active workspace, as the
reward data of the individual “waits” for more signal
data or action data or expected response data to make
connection for reward or lack of confidence (best
matching neighborhood action cells) on the existing
signal data.
Introduction of a new signal data, or action data
or expected response data as a new cell, ∁, with a
local counter variable 𝜏
∁
and since the cells are
slightly moving around, more recent signals may be
weighted stronger than previous ones. Here the main
characteristic of the model could be that several
adaptation steps may sometimes be followed by a
single insertion. One may note the following
feedback relation between the two types of action: a)
every adaptation step may increase the signal, action
and response counters of the best-matching unit and
thereby increases the chance that another cell will be
inserted near this cell; b) insertion near a cell ∁
decreases both the size of its Voronoi field 𝐹
∁
and the
value of the signal or action or expected response
counter. The reduction of the Voronoi field makes it
less probable that ∁ will be best-matching unit for
future input signals.
Networks are then analyzed in terms of groups of
nodes that are all-to-all connected, termed as cliques.
The number of neurons in a clique determines its size,
or more formally, its dimension. In directed graphs it
is natural to consider directed cliques, which are
cliques containing a single source neuron and a single
sink neuron and reflecting a specific motif of
connectivity (Song, Sjöström, Reigl, Nelson and
Chklovskii, 2005), wherein the flow of information
through a group of neurons has an unambiguous
direction. The manner in which directed cliques bind
together can be represented geometrically. When
directed cliques bind appropriately by sharing
neurons, and without forming a larger clique due to
missing connections, they form, termed as, cavities
(“gaps,” “voids” or “unknowns”) in this geometric
representation, with high-dimensional cavities
forming when high-dimensional (large) cliques bind
together. Directed cliques describe the flow of
information in the network at the local level, while
cavities provide a global measure of information flow
in the whole network. Using these naturally arising
structures, we established a direct relationship
between the structural graph and the emergent flow
of information in response to stimuli, as captured
through time series of functional graphs (Reimann,
Nolte, Scolamiero, Turner, Perin, Chindemi, Dlotko,
Levi, Hess and Markram, 2017).
These structural graphs are analyzed at different
timepoints. As time progresses, for example, the
parameters in rules associated with active experience
or historical or neither may change and/or eliminated,
and thereby change prediction and prescription that
determine the action data for the action indicator. As
time progresses, at each step of determining the state
data, the action data, the expected response data, and
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
842
the reward data also change optimal controls for the
individual and groups. The Voronoi region 𝐹
∁
, for
example, by an n-dimensional hypercube with a side
length equal to the mean length 𝑙
̅
∁
of the edges
emanating from ∁ with 𝑙
̅
∁
computed by
𝑙
̅
∁
=
1
𝑐𝑎𝑟𝑑 (𝑁
∁
)
‖
𝑤
∁
−𝑤
‖
∈
∁
(10)
From the above, it is evident that it would be very
helpful to know the true dimensionality of the data,
meaning the smallest dimensionality t, such, that a t-
dimensional sub-manifold of V may be found
containing all (or most) input data. Then t-
dimensional hyper-cubes may be used to estimate the
size of the Voronoi regions. However, to figure out
the value of t, especially because the mentioned sub-
manifold may not have to be linear but could be
randomly twisted. Therefore, even analyses of the
signal, state, expected response and reward data may
not, in general, reveal their true dimensionality and
remain “unaided”, but gives only (or at least) an
upper bound. However, the method of training for
machine to learn and, therefore, gives some general
rules for choosing such an estimate that do work well
for all activities that may be encountered
subsequently.
Moreover, as time progresses, the learning
system may accelerate or decelerate the speed of
information flow between signal and state and action,
and expected response and reward. This may support
the two structural update operations: a) insertion of a
cell, as a neuron; b) deletion of a cell, as a neuron.
These operations may be performed such that the
resulting structure consists exclusively of multi-
dimensional structure ℋ . Although such a data
structure may already be sufficient in this example, a
considerable search effort may be needed to make
consistent update operations. The removal of a cell
may also require other neurons and connections are
removed to make the structure consistent again.
Simple heuristics as, for example, to remove a node
remove all neighboring connections and the node
itself may not work properly. For this purpose, a
tracking mechanism of all the ℋ may be introduced
in the current network. Technically, a new data type
simplex may be created, an instance of which
contains the set of all nodes belonging to a certain ℋ.
Furthermore, with every node associated to the set of
those ℋ the node may be part of. The two update
operations can now be formulated as: a) a new node
r may be inserted by splitting an existing edge qf. The
node r may be connected with q, f, and with all
common neighbors of q and f. Each ℋ containing
both q and f (in other words, the edge being split) may
be replaced by two ℋ each containing the same set
of nodes as ℋ except that q respectively f may be
replaced by the new node r. Finally, the original edge
qf may be removed. The new ℋ may be inserted in
the sets associated with their participating nodes. b)
to delete a node, it may be necessary and sufficient to
delete all ℋ the node may be part of. This may be
done by removing the ℋ from the sets associated
with their nodes. The same may be done with nodes
having no more edges. This strategy may lead to
structures with every edge belonging to at least one
ℋ and every node to at least one edge. Therefore, the
resulting k-dimensional structures may be consistent,
that is, contain only k-dimensional ℋ.
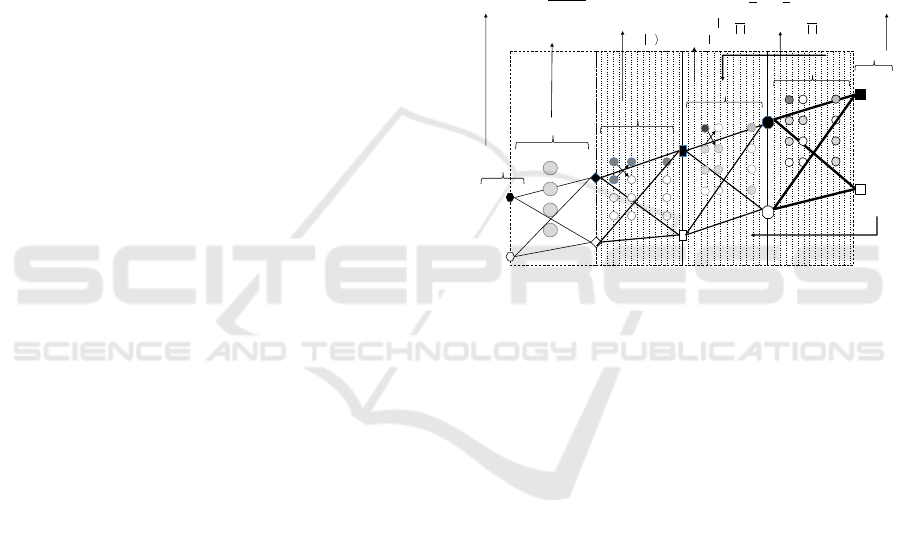
Figure 3: Optimal Learning of SCANN With Voronoi
Regions Derive Choice-sets.
Fig. 3 above illustrates an optimization method of
multiple-layered multi-dimensional with dynamic
expansion and contraction of SCANN structure – the
plasticity – where the individual activity content, as
structured in the learning system, are optimized with
dynamic programming method to minimize statistical
errors. A relational clique is constructed of a
clique over all activities at various locations on a
trajectory, which has an activity of one or more
individuals. Each clique C is associated with a
potential function 𝜙
(
𝑣
)
that maps a tuple (values
of decisions or aggregations). These evolutionary
structures may establish a relationship between the
structural graph and the emergent flow of information
in response to activity content, as captured over time
of functional graphs. The activity content and
likelihood of (K-1) dimensional simplex 𝑆
in the
network structure may find multi-nomial distribution,
which could be denoted as Mult(𝑝
,… 𝑝
; 𝑛), in a
discrete distribution over K dimensional non-
negative integer vectors 𝐱∈ℤ
where
∑
𝑥
= 𝑛.
Here, 𝒑 = (𝑝
;…;𝑝
) in an element of 𝑆
and 𝑛 >
1. Together they may provide a) activity-content, b)
probability mass function as expressed,
…
Signal (k)
Signals Group (K)
Signals in activity (ξ
t
)
Individual (i)
…
Individuals Group (l)
Actions in activity ( )
Hidden factors(g
t
)
Response in activity(sr)
…
Individuals in
activity (I
t
)
…
u= 1…A
Reward in activity(u
t
)
…
State in activity (s
t
)
…
Latent features (a
f
)
State (Z)
Action (A)
…
Latent attributes (w
i
)
Response (B)
State in Group (Z’)
Action in Group (A’)
Response in Group (B’)
Reward (U)
Reward in
Group (U’)
Group in
activity (I’
t
)
f (x
1
,..., x
k
; p
1
,..., p
k
, n) =
Γ(n+1)
Γ(x
i
+1)
i=1
K
∏
p
i
x
i
i=1
K
∏
ξ
(t) = c
j
0
,k
s
k=0
2
j
0
−1
φ
j
0
,k
(t) + d
j, k
s
k=0
2
j
−1
j= j
0
∞
ψ
j, k
(t)
Z
t
=
d
∈
g
(
∈
)
dt
0
1
t
e
−
β
∈
i
k
(
∈
,
t
,
t
0
)
ψ
f
=
ˆ
J
(
ˆ
U
A
⊗
ˆ
U
B
)
ˆ
JCC
sr
i
T
(
Ba
)
1
A
i
B
P
i
T
(
x
,
a
)
dx
+
(1
−
1
A
i
A
i
P
i
T
(
x
,
a
)
dx
)1
a
i
(
B
)
u
a,i
E
(t +Δt) = 1−
Δt
τ
E
u
a,i
E
(t) +
1
τ
E
J
ij
a
x
j
a
(t) +
ω
EE
s
a, j
E
+
ω
EI
s
a, j
I
(t)
j
j≠i
j
ψ
cc ∈
Self-organized Cognitive Algebraic Neural Network
843

𝑓
(
𝑥
,…,𝑥
; 𝑝
,…𝑝
,𝑛
)
=
Γ(𝑛 +1)
∏
Γ(𝑥
+1)
𝑝
(11)
to optimize activity content for the individual with
minimized errors. For example, the buyer’s system in
a buyer-seller-trader network optimizes the product
information workspace that may wait for additional
information to formalize specific rules, say “predict”,
and minimize errors.
Any new or update on activity content may
initiate signals in activity, which may form the
maximum likelihood estimate (“MLE”) of the signal
and noise (e.g. data not immediate relevance) for
imperfect or incomplete information condition
parameters may train machine to learn as a signal, as
well as the MLE of the noise parameters may be
trained to be learned as noise. The ratio of these two
quantities may be taken and compared with upper and
lower thresholds until a decision may be made, based
on two properties desirable in a continuous sequential
detection which may have no analogue in fixed-
sample detection, or even in sequential detection, and
optimized content as in
𝜉
(
𝑡
)
=𝑐
,
∅
,
(
𝑡
)
+𝑑
,
𝜓
,
(𝑡)
(12)
First, the likelihood ratio could be a continuous
function of the length of the observation interval for
fixed parameter estimates; second, the MLEs could
also be continuous functions of the observation
interval.
Each individual signal data, as quantum
candidate, are aggregated into groups as a function of
one or more of attributes and features including time,
location, transition and constraints. The grouping
included an aggregation of each individual’s
decisions into groups, based on sheafing methods
used earlier for the aggregation into groups for
systematically tracking each individual’s signal data,
with various attributes and features, attached to open
sets of a topological space. We fix a set Λ of values
for a latent variable. A latent-variable model ℎ over
Λ assigns, for each 𝜆∈Λ and ∁ ∈ ℳ, a distribution
ℎ
∁
∈ 𝒟
ℛ
ℰ(∁). It also assigns a distribution ℎ
∈
𝒟
ℛ
(Λ) on the latent variables. This may obtain the
map ℰ
(
𝑋
)
⟶∏
∁∈ℳ
𝒫(ℰ
(
∁
)
) . We may use the
isomorphism
𝒫(𝑋
)≅
𝒫
(𝑋
)
(13)
which may take the limit of the cohomology
groups of the neural network system as
𝐻
(
{
𝑈
→𝑈
}
,𝐹
)
= ker (Hom
⨁
𝑍
,𝐹⇉
Hom
⨁
,
𝑍
,
,𝐹
= HomZ
{
}
,𝐹 (14)
The groups determined by grouping methods use
prediction activities and optimization of content
operation for the groups. Based on the predictions for
the group, an optimal set of choices may be
determined for the group. For example, in the trading
system of buyer-seller-trader network optimizes the
product information workspace for the aggregated
group to “forecast” price of nearest-neighbor, predict
maximum likelihood of forecasted price of the
nearest-neighbor and minimize errors to formalize
specific rules and optimal policies for various
features and attributes that drive forecast.
This abstraction of dynamic and active
workspace, as layer, created for each optimized
signal data including “wait” data and “new cell”
data, as explained above, parallel connections
between any cliques and cavities as described above,
as sigma cell in the layer (l) and the output of any
data, as neuron, in the layer (l
-1
) may be generated.
The number of these parallel connections is equal to
the number of activation functions in the layer (l).
Therefore, in the layer (l) an activation function along
with all sigma cells or equivalently the sigma blocks
are considered as a single multi-dimensional data or
neuron, as shown by dashed line in Fig. 3.
6 CONCLUSIONS
Multi-layered and multi-dimensional SCANN
networks explicitly incorporate multiple channels of
connectivity and constitute the natural environment to
describe decision-making system interconnected
through different categories of connections: each
channel (relationship, activity, category) is
represented by a layer and the same node or entity
may have different kinds of interactions (different set
of neighbors in each layer).
In addition, when SCANN is used, a smaller error
rate of about 0.32% can be acquired with a much
smaller number of reference vectors, if the SCANN is
combined with tune-up Voronoi region (Vr). The
computational cost of this method is smaller not only
for deep learning but also for the pattern recognition
due to smaller number of reference vectors.
The future research will study the interaction
structures of economic or knowledge networks
accounts for cognitive intelligence, if any, that require
SCANN methods. The study will emphasize the
properties of perfect and complete information; the
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
844

interaction of potential use of SCANN; and the
exponentiality of the deeper neural network.
REFERENCES
Edwards, Ashley; Isbell, Charles; Takanishi, Atsuo (2016):
Perceptual Reward Functions; Frontiers and Challenges
Workshop, IJCAI 2016.
Barnett, Samuel A (2018): Convergence Problems with
Generative Adversarial Networks; A dissertation
presented for CCD Dissertations on a Mathematical
Topic, Mathematical Institute, University of Oxford
2018.
Aamodt, Sandra and Wang, Sam (2008): Welcome to Your
Brain: Why You Lose Your Car Keys But Never Forget
How to Drive and Other Puzzles of Everyday Life; New
York, USA.2008.
Sen, Prabir (2017): Data Analysis and Rendering, Patent
Application No. 15/789,216 Publication No. US-2019-
0122140-A1.
Bachleda, Amelia R. and Thompson, Ross A. (2018): How
Babies Think; Zero to Three, January 2018.
Skoe, Erika and Kraus, Nina (2012): A Little Goes a Long
Way: How the Adult Brain Is Shaped by Musical
Training in Childhood; The Journal of Neuroscience,
August 22; 32(34):11507–11510.
Kenji Amaya, Masakazu Endo, Shigeru Aoki (1999):
Construction of Neural Network using Cluster Analysis
and Voronoi Diagram; Transactions of the Japan
Society of Mechanical Engineers Series C, 1999;
Volume 65 , Issue 638.
Polianskii, Vladislav and Pokorny, Florian T. (2019):
Voronoi Boundary Classification: A High-Dimensional
Geometric Approach via Weighted Monte Carlo
Integration; Proceedings of the 36th International
Conference on Machine Learning, Long Beach,
California, PMLR 97, 2019.
Tennison, B.R (2011): Sheaf Theory; Cambridge
University Press 1975.
Erdo¨s, P. & Renyi, A (1960). On the evolution of random
graphs. Publ. Math. Inst. Hung. Acad. Sci. 5.
Sen, Prabir (2015): Location-based Cognitive and
Predictive Communication System; US Patent
9,026,139.
Bianconi, G., and Barabási, A.L., (2001): Bose-Einstein
Condensation in Complex Networks; Phys. Rev. Lett.
86, 5632 – Published 11 June 2001.
Fukushima, K (2013): Artificial Vision by Multi-Layered
Neural Networks: Neocognitron And Its Advances;
Neural Networks, 37, pp. 103-119 (Jan. 2013).
Song, S., Sjöström, P. J., Reigl, M., Nelson, S., and
Chklovskii, D. B. (2005). Highly Nonrandom Features
of Synaptic Connectivity In Local Cortical
Circuits. PLoS Biol. 3:e68.
Reimann, Michael W., Nolte, Max, Scolamiero, Martina,
Turner, Katharine, Perin, Rodrigo, Chindemi,
Giuseppe, Dlotko, Pawel, Levi, Ran, Hess, Kathryn and
Markram, Henry (2017): Cliques of Neurons Bound
into Cavities Provide A Missing Link Between
Structure and Function; Frontiers in Computational.
Neuroscience, 12 June 2017.
Self-organized Cognitive Algebraic Neural Network
845
