
Management of Intelligent Vehicles: Comparison and Analysis
Guilhem Marcillaud
1
, Valerie Camps
1
, St
´
ephanie Combettes
1
, Marie-Pierre Gleizes
1
and Elsy Kaddoum
2
1
Institut de Recherche en Informatique de Toulouse, Universit
´
e Paul Sabatier, Toulouse,France
2
Institut de Recherche en Informatique de Toulouse, Universit
´
e Jean Jaures, Toulouse, France
Keywords:
Connected and Autonomous Vehicles, Cooperative Interaction, Intelligent Transportation System.
Abstract:
The main purpose of Connected and Autonomous Vehicles (CAVs) is to ensure optimal safety while improving
user comfort. Many studies address the problem of CAVs to improve specific driving situations (intersection
management, traffic flow management, etc.). In this paper, we propose both a comparison of these systems
according to a set of criteria and an analysis to assist the development of CAVs fleets. This analysis shows that,
among other, the ad-hoc algorithms use similar data (position, speed, etc.) and that the decisions for vehicles
are based on cooperative processing for specific situations. The objective of this paper is to provide a guide
for the design of CAVs fleet capable of managing all traffic situations.
1 INTRODUCTION
Over the past years, the population of large urban ar-
eas has increased significantly. The resulting traffic
jams cause stress, considerable time loss and harm-
ful pollution (Pulter et al., 2011). In addition, the
majority of road accidents are due to human error
such as inattention or drunk driving (French govern-
ment, 2019). Level 3 to 5 Autonomous Driving Sys-
tem (ADS) equipped vehicles (SAE On-Road Auto-
mated Vehicle Standards Committee, 2018) are useful
to prevent accidents related to those errors.
Vehicles have now the ability to send specific
messages to other vehicles and road infrastructures
(Sharif et al., 2018); V2V (Vehicle To Vehicle) and
V2I (Vehicle To Infrastructure) communications are
called ”connected”. Such a vehicle controlled by
a computer system is called a Connected and Au-
tonomous Vehicle (CAV).
Although many CAVs fleet have been developed
in recent years, it is difficult to obtain an artificial
system that can efficiently address all situations en-
countered during a journey. This problem is increased
by the necessary use of simulators to test these CAV
fleet. Road traffic encompasses many different situa-
tions. It is then very complicated to find a simulator
able to model all encountered situations including a
large number of vehicles, with characteristics close to
reality (Sobieraj et al., 2017). In this paper, different
CAVs fleets are first compared. Then based on this
analysis, a guideline for a CAVs fleet capable of man-
aging all road situations is proposed.
The paper is organised as follow: section 2 defines
the requirements and criteria required. Then, sections
3 to 5 describe existing CAV fleet dedicated to each
traffic situation and analyse them based on the previ-
ously defined criteria. section 6 presents the synthesis
of all the studied system. Before concluding, section
7 proposes a guideline for designing a robust CAV
fleet.
2 REQUIREMENTS OF A CAVs
FLEET
As a driver, a human or an ADS, has the duty to ensure
safety of all passengers. We assume that this point is
covered in all the studied systems. The comparison
is based on the situations addressed in these systems.
Multiple criteria such as the purpose of the system,
the traffic mix, and the volume of communications are
used to study them.
2.1 Focus on the Addressed Situations
During a journey, a vehicle can encounter many dif-
ferent situations such as: (i) traffic congestion, (ii)
intersections and (iii) lane merging. These three
situations are focused in the current research works.
258
Marcillaud, G., Camps, V., Combettes, S., Gleizes, M. and Kaddoum, E.
Management of Intelligent Vehicles: Comparison and Analysis.
DOI: 10.5220/0009117802580265
In Proceedings of the 12th International Conference on Agents and Artificial Intelligence (ICAART 2020) - Volume 1, pages 258-265
ISBN: 978-989-758-395-7; ISSN: 2184-433X
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Whatever the encountered situation, a vehicle has the
objective of taking the best decision in coordination
with other vehicles to manage the situation in an opti-
mal and safe manner. During the experimentation of
a system, scenarios are designed; their consideration
is detailed during the analysis.
2.2 Criteria of Comparison
For highlighting the strengths and weaknesses of the
studied systems, we propose eight relevant criteria
identified in the literature.
1 - System Objectives: among the compared
systems, three main purposes stand out: minimising
travel time (Agarwal and Paruchuri, 2016), reducing
energy consumption and pollution (Pulter et al., 2011)
and smooth driving (Di Vaio et al., 2019). It should
be noted, that these issues are not independent.
2 - Locality of the Decision: (Barthelemy and
Carletti, 2017) being in the context of a CAVs fleet,
the implementation of the control process is studied:
distributed or centralised.
3 - Communication Volume: (Sharif et al., 2018)
connected vehicles have the ability to receive and pro-
vide data through increasingly efficient communica-
tion. The amount of data flow can become very large
and be a problem.
4 - System Robustness: (Ioannou and Zhang,
2018) robust system can react to unexpected events.
The ability of CAVs to act in the event of disruptions
is assessed.
5 - Knowledge of the Scenario: the experimenta-
tion of a system takes place within the framework of
a specific scenario that CAVs might know in advance.
This knowledge influences the reaction of a CAV after
it has detected unexpected events in the scenarios.
6 - Mixed Traffic: (Rios-Torres and Malikopou-
los, 2016) the possibility of the presence of non ADS-
equipped vehicles and other types of users (pedestri-
ans, cyclists, ...) must be taken into account.
7 - Scaling: the number of vehicles influences the
reliability of the system and may reveal specific prob-
lems that need to be considered.
8 - Simulation Model: (Sobieraj et al., 2017) to
know its effectiveness, a system is evaluated under
certain conditions. Microscopic models are used to
observe a situation with a few numbers of vehicles
with a close representation of the vehicles’ dynamics.
Macroscopic models aim at observing a large number
of vehicles (the traffic in a big city).
The following section presents and evaluates 16
CAVs systems identified in the literature that address
a solution to a road problematic. The purpose is to
extract a guideline and the requirements for a system
capable of managing all road situations. Each sys-
tem is studied according to the eight criteria defined
in section 2.2.
3 PANORAMA OF CAV FLEET
FOR TRAFFIC FLOW
The objective of these CAVs fleet is to maintain a
smooth traffic in the 8 following situations.
3.1 Learning the Best Path based on
Congestion
Large urban areas experience congestion problems on
major roads can be mitigated by the use of CAVs
and learning mechanisms (Barthelemy and Carletti,
2017). The authors present a Multi-Agent System
(MAS) with CAV agents. Some CAV agents are
called strategic and choose the best path to improve
travel time using a neural network. Each agent uses its
knowledge on nearby roads to take its decision. The
experiment focuses on the Chicago city network, by
varying the proportion of strategic CAV agents in the
system. The authors observe that an increase of the
strategic CAV agents also increases the traffic flow.
Using local data only provides a low volume of com-
munications and agents do not need to know the sce-
nario to learn and choose the best route. In this exper-
iment, Matlab is used to simulate at the macroscopic
level a large number of vehicles and therefore to suc-
cessfully scale up.
3.2 Choosing the Best Path using
Pheromone Deposit
(Mouhcine et al., 2018) propose a MAS in which
agents follow a pheromone based strategy to in-
dicate congestion on an axis. In their MAS
called ”Distributed Vehicle Traffic Routing System”
(DVTRS), pheromones are dropped by stopped ve-
hicles. Through communicating infrastructures, non
grounded vehicles are aware of the densest roads and
can therefore choose a more fluid road. The advan-
tage of this system is that vehicles require few knowl-
edge and communication to take their decisions. On
the other hand, this MAS is not defined in a hybrid
context: the CAVs will then lack information about
non connected vehicles. In this DVTRS, each vehi-
cle is an agent with a total control over its own de-
cisions/actions and can be abstracted from the par-
ticularities of each scenario through the use of lo-
cal knowledge only. The DVTRS experiment at the
Management of Intelligent Vehicles: Comparison and Analysis
259

macroscopic level is located in the road network of a
large city.
3.3 Reduce Shock Waves using
Communications
A shock wave is often the result of intense actions
such as emergency braking and it results in slow-
downs and an increase of traffic density. (Di Vaio
et al., 2019) propose a control strategy with MAS in
which CAVs coexist with non autonomous vehicles,
both being connected. CAV agents use the exchanged
data to adapt their speed and to be informed as quickly
as possible about the actions of others. A better antici-
pation before the shock wave, prevents vehicles to act
urgently: vehicles thus have a more fluid and more
ecological driving behaviour. CAVs make local de-
cisions using certain data (velocity, direction, target)
obtained every 20 ms. The experiment simulates vehi-
cles dynamics in a microscopic simulation and shows
that this strategy goes to scale with a high number
of vehicles.
3.4 Reduction of Consumption by
Anticipation
In the case of CAVs, communications can provide
and process many more information than a human
driver. The use of a predictive control model provides
to the vehicle anticipation capabilities. This type of
model proposed by (Kamal et al., 2015) combines
lane change, acceleration and braking data. In a con-
text of perfect communications, CAVs accelerate op-
timally and predict the best time to change lane: they
save fuel while reducing travel time. But as commu-
nications must be perfect and data up to date, it re-
quires a large volume of communications and in case
of incorrect or missing communications, the system
cannot work. A CAV does not have any knowledge of
the scenario used for the experiment. This one simu-
lates six vehicles, on two lanes using a microscopic
simulator, the scaling has not been proved.
3.5 Selection of the Least Congested
Intersections
The distribution of vehicles at intersections can be un-
even and result in traffic congestion. Through the
use of intelligent communications and infrastructure
controlling intersections, CAV agents can decide to
change the route as shown by (Lin and Ho, 2019).
This MAS approach allows a better distribution of
CAV agents between intersections, leading to a re-
duction of intersection congestion. Each agent de-
cides locally even if a server may ask it to change its
route. Although communication is essential for the
proper functioning of the system, the volume of in-
formation exchanged is not high. The CAV agent
has knowledge about the scenario through the graph
representing all the intersections given as an input at
the entrance of the system. The presented experimen-
tation concerns the macro level and is scalable.
3.6 Cooperation of CAVs in Squads
Platooning is a squad based vehicle formation in
which the front vehicle is the leader. The advantage of
such a strategy is the fast and secure information shar-
ing between the vehicles of the squad (Llatser et al.,
2015). Thus, the vehicles follow the leader and their
speed is aligned its. Vehicles have the possibility to be
closer than usual and do not risk collisions as they all
act in coordinated way, the driving is smooth. This
type of training was experimented with real vehicles
as part of the ”Grand Cooperative Driving Challenge
2016” (Englund et al., 2016) in which two CAVs
squads aimed to merge into a single squad. The merg-
ing action is initiated by leaders of each squad, and
from that moment each vehicle wishing to join the
squad binds by communication to one of the present
vehicles. Vehicles then insert themselves one behind
the other. The platooning method centralises deci-
sions (speed and travel) at the leader’s level but each
vehicle has autonomy for some actions, such as de-
ciding to leave the squad when desired.
3.7 Emergency Vehicle in Heavy Traffic
Driving emergency vehicles (EV) in heavy or con-
gested traffic is often problematic, as they are slowed
down even if vehicles trapped in traffic try to clear the
way for the EV. (Agarwal and Paruchuri, 2016) pro-
pose a strategy for the EV that consists in choosing the
fastest lane at one time and sticking to it, while asking
other Connected Vehicles (CV) to clear that lane. This
strategy, constraining other CVs, is not efficient when
the traffic density is too high. Another strategy con-
sists in choosing the best lane according to the number
of vehicles visible by the EV and the possible speed
on the lane. It thus allows EVs to reduce their travel
time. As only one message is exchanged between the
EV and each vehicle, the volume of communication is
low. The experiment of both strategies is carried out
on a two kilometres road with the SUMO simulator
(Behrisch et al., 2011) allowing microscopic simula-
tion of vehicles.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
260

3.8 Anticipation of Lane Change in the
Event of an Incident
When a vehicle has an incident that brings to a stand-
still on a lane, the reduction of available lan might
lead to a traffic congestion. As a consequence, in-
tense braking and lane changes at lower speeds may
arise. That is why (Ioannou and Zhang, 2018) pro-
pose to inform the CAVs of the lane impracticability
in advance. The CAV agent, the incident initiator or
one CV receiving the message, can in turn dissem-
inate the information. Although lane reduction still
has an impact on traffic, congestion is reduced. Each
CAV agent takes its own decision based on the infor-
mation received and can communicate with other ve-
hicles, ADS-equipped or not. As only the presence of
the incident is exchanged, the communication volume
is low. A microscopic digital experiment is presented
and this system succeeds in scaling up.
This study highlights the contribution of commu-
nications, and the use of a local control for a CAV in
order to take a better decision.
4 PANORAMA OF CAVs FLEET
FOR INTERSECTION
MANAGEMENT
Until now, the road code and traffic signs were suf-
ficient to guarantee the safety of users to manage in-
tersection when all the rules are respected. An inter-
section may be seen as a dangerous area. In this sec-
tion, the studied CAVs systems addressing this issue
are using two different approaches: the centralised
approach with an agent in charge of the intersection,
Infrastructure Management Agent (IMA), which con-
centrates decisions, and the decentralised approach in
which CAV agents cooperate with each other to find
a consensus, with an IMA possibly helping this coop-
eration.
4.1 Coordination of Vehicles by
Reservation in an Intersection
In the centralised approach, an IMA communicates
with vehicles wishing to cross the intersection by in-
dicating how to proceed, and uses the notion of reser-
vation (Jin et al., 2012; Dresner and Stone, 2008; Pul-
ter et al., 2011). (Jin et al., 2012) propose a Multi-
Agent Intersection Management System (MAIMS)
using reservations. A CAV agent approaching the
intersection has to request a reservation by sending
its objective. The IMA reserves a slot that allows
the CAV to cross the intersection without being in
conflict with other vehicles. The particularity of the
MAIMS is that it uses a vehicle scheduling approach
instead of a FIFO one. All the near CAV agents re-
port their speed, position and destination to the IMA,
then it organises their crossing order. Authors have
noticed that with a large number of CAVs, the volume
of communications becomes problematic. The ex-
periments carried out on SUMO with MAIMS show
a clear improvement of the vehicle flow compared
to the FIFO-based approach. However, this system
shows no improvement in fuel consumption: the au-
thors suggest that it comes from vehicle trajectories.
The presented experimentation uses a large number of
vehicles: the scaling for this scenario is validated.
4.2 Optimisation of Trajectories in an
Intersection
(Kamal et al., 2014) propose a Vehicle-Intersection
Coordination Scheme (VICS) to obtain a more fluid
traffic at an intersection and a reduced fuel consump-
tion. To reach these objectives, they optimise the
trajectory of each vehicle agent using an IMA lo-
cated in the intersection, which schedules the CAVs.
The authors experiment VICS on Matlab, which is
distant from real vehicle conditions and show that
VICS eliminates almost all the stops at the intersec-
tion: this significantly improves traffic flow and
fuel consumption for each vehicle. An experiment
with a large number of CAVs shows the transition to
system-wide. However, VICS operates in the context
of a traffic composed solely of CAVs that are coop-
erative with the IMA and the volume of communica-
tions may become too large.
A centralised approach leads to significant data
exchange and to possible congestion of communica-
tion flow. CAVs, equipped with V2X perception and
communication devices, can also negotiate to facili-
tate the resolution of non-cooperative situations.
4.3 Negotiations between CAVs in an
Intersection
(Gaciarz et al., 2015) propose a negotiation mecha-
nism between CAV agents wishing to cross an inter-
section. In this mechanism, the intersection is divided
into cells and CAV agents communicate in order to
obtain a coherent configuration. The IMA of this sys-
tem has a greater knowledge than CAV agents and
has the ability to propose configurations that improve
the overall fluidity without impacting local agent sat-
isfaction. Each agent is free to accept or refuse the
Management of Intelligent Vehicles: Comparison and Analysis
261

IMA proposition according to its preferences and ob-
jectives. Negotiation includes all the agents present
in the intersection at the current time and it does not
generate a high volume of communications; however
the presence of non-cooperative vehicles is not con-
sidered. Experimentation with this mechanism shows
that the length of queues in the intersection is reduced.
The simulation using threads does not allow to have
a simulation close to reality but the number of vehi-
cles is sufficient to validate the scalability.
These studies underline that the CAVs can negoti-
ate together the appropriate time to cross an intersec-
tion with a low volume of communications. Cooper-
ation between CAVs and infrastructure improves the
smoothness of the crossing.
5 PANORAMA OF CAVs FLEET
FOR THE MANAGEMENT OF
LANE MERGING
The third situation that a CAVs must be able to handle
is the lanes merging. It is difficult because a vehicle
that wants to join a lane has to adapt its speed to the
other vehicles in that lane and to find the best place to
insert into it with a minimum of discomfort for other
vehicles.
5.1 Coordination of CAVs at Merging
Point
The merging zone of the two lanes may be man-
aged by an agent present in a connected infrastruc-
ture. (Rios-Torres and Malikopoulos, 2016) propose a
controller that organises vehicles in FIFO for this area
by giving each of them an identifier to organise them.
This system seeks to optimise fuel consumption by
calculating the most appropriate time and speed to in-
sert smoothly and safely at the merging point. A con-
troller ordering the insertion allows the management
of CVs but not CAVs. Experiments with this system,
carried out under Matlab, have shown a reduction in
fuel consumption and a more fluid merging regard-
less of the number of vehicles. However, the authors
highlight a limit when the vehicle speed is too high.
5.2 Cooperation Upstream of the
Merging Point
(Wang et al., 2018b) propose a protocol for cooper-
ation between vehicles before reaching the merging
point of the lanes. Each CAV agent sends its data
(acceleration, speed and position) to an infrastructure
agent which sequences the vehicles and indicates to
each of them which vehicle is in front of it. A CAV
agent receives data from the vehicle in front of it in or-
der to adapt its speed to reach the merging point at the
optimal time, even if both are on two different lanes.
A large volume of data is required to build this sys-
tem. An agent-based simulation made of six vehicles
in Unity (Wang et al., 2018a) compares the use of this
system to human conductors; it results in a reduction
of travel time and energy savings for CAV agents.
Although the previous approach presents very in-
teresting results, it requires the presence of a con-
troller and therefore an infrastructure to host it. Some
decentralised approaches avoiding infrastructures are
presented.
5.3 Decentralised Cooperation before
the Merging Point
(Mosebach et al., 2016) propose a decentralised lane
merging control algorithm in which CAVs use com-
munications to determine if a vehicle is present in the
area preceding the lane merging. If a CAV has de-
tected vehicles, it slows down and calculates a tra-
jectory to cross the merging point without collision.
When the CAV considers that this trajectory is cor-
rect, it follows it by re-accelerating. The required
communications concern the other vehicles as well
as their speed. The CAVs know the road typology
and cross the merging zone in FIFO. The simulation
of two lanes merging with 40 vehicles shows that the
CAVs are inserted smoothly while maintaining a safe
distance.
5.4 Decentralised Merging in Mixed
Traffic
(Sobieraj, 2018) proposes a cooperation protocol be-
tween CAVs. In an area, known by the CAV agents
and close to the merging point, the CAVs of two dif-
ferent lanes communicate to form pairs. Then, the
CAV agents of each couple coordinate their accelera-
tion to position themselves at a safe distance one be-
hind the other. The resulting communication vol-
ume is low and acceleration calculations are based
on models that allow fluid insertion. The experi-
mentation consists in merging two lanes crossed by
a dense vehicles flow. The presence of CAV agents
improves traffic flow and waiting times have almost
disappeared. This approach can be used in a mixed
traffic despite lower performance.
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
262

5.5 Change of Cooperative Path with
Confidence Index
(Monteil et al., 2013) have designed a mechanism for
cooperation between CAVs agents by considering un-
reliable communications. This method is based on
a confidence index that each CAV agent calculates
for each vehicle communicating with it, thus it may
evaluate the quality of the communications. In the
case of missing or unreliable communications, the
CAV can only use its own perceptions to make deci-
sions: the presence of unconnected vehicles is con-
sidered. The local control and the ability to use
only its perceptions validate the robustness of this
method. Adding to this mechanism a connected in-
frastructure (Gu
´
eriau et al., 2016), provides access to
additional information to the CAV agents with an in-
crease of the volume of communications. The sim-
ulation of a flow of a large number of vehicles shows
that the presence of CAVs and infrastructure smooths
the merging zone.
6 SYNTHESIS AND ANALYSIS
Table 1 summarises and synthesises the results (with
ratings ranging from - - to ++; - - means not at all and
++ totally, while NA means not addressed).
We note that the majority of systems only work in
a fully connected and cooperative environment. The
presence of unconnected, so eventually uncoopera-
tive vehicles, makes difficult for CAVs to determine
their behaviour. Nevertheless, CAVs and non ADS-
equipped Vehicles will very probably have to coexist
before the traffic becomes fully autonomous.
First of all, only the system of (Wang et al., 2018b)
has an explicit influence on the travel time, the pol-
lution emitted and the fluidity of the traffic flow.
However, it only concerns the insertion in a lane
merging. Systems that aim to find the best route
mainly influence travel time even if it is not clearly
stated.
Managing an intersection requires a substantial
volume of communications when a large number of
vehicles are present. The studied systems need that ei-
ther IMA or CAV agents have some scenario knowl-
edge. Thus, each intersection must be specified and
the modification structure of an intersection requires
a new specification.
Only systems whose objective is to find the best
path are robust because it does not require to make a
quick decision. This is due to the complexity of the
real vehicles and all the factors that need to be con-
sidered when decisions are made within a very short
time frame.
In all three situations, the fact that a CAV agent
shares its objectives, speed and position allows other
vehicles to have a better anticipation and understand-
ing of this vehicle. Most of the conflict situations that
a vehicle may encounter in these systems involve the
sharing of space.
The presence of unconnected entities is often not
considered in the studied systems (see Table 1). If we
consider that a not connected entity in a traffic is a
mobile or an unpredictable obstacle, then a CAV will
only have to avoid that entity.
A CAV that only needs local information and a
small amount of knowledge can adapt to unexpected
situations. As shown in Table 1, only systems with a
positive assessment for these two criteria also have a
positive assessment for robustness.
Among the 16 systems presented, 12 are MAS in
which CAV agents use a cooperative process when
confronted with one of the three situations.
7 A GUIDELINE TO SATISFY
THE REQUIREMENTS OF A
CAVs FLEET
From the requirements (Section 2) and the analysis of
the different systems, we propose a guideline to de-
sign CAVs fleet, which consists in high level design
principles concerning decentralisation, communica-
tion, robustness, knowledge of the scenario, mixed
traffic and scalability.
All the CAVs in the studied systems have the
same design and consequently the same behaviour
in a given situation. However, in real life they have
several designs leading to different behaviours in the
same situation. Thus, the results given in these studies
have to be taken with hindsight.
Because centralised systems use a lot of informa-
tion considered as safe, regardless of uncooperative
behaviour or incidents, a local control of the CAV
using partial perceptions and able to adapt to unex-
pected situations is mandatory.
In order to avoid bottlenecks of communications,
the use of a centralised system for communications
should be avoided. However, each CAV should not
share all its data to all other CAVs because the volume
of communications will explode. It is required for a
CAV to learn which information is useful to share
for a situation in order to limit their amount and to
facilitate the decision process.
Even faced to unknown situation, a robust CAV
must be able to take a correct decision. Moreover,
Management of Intelligent Vehicles: Comparison and Analysis
263
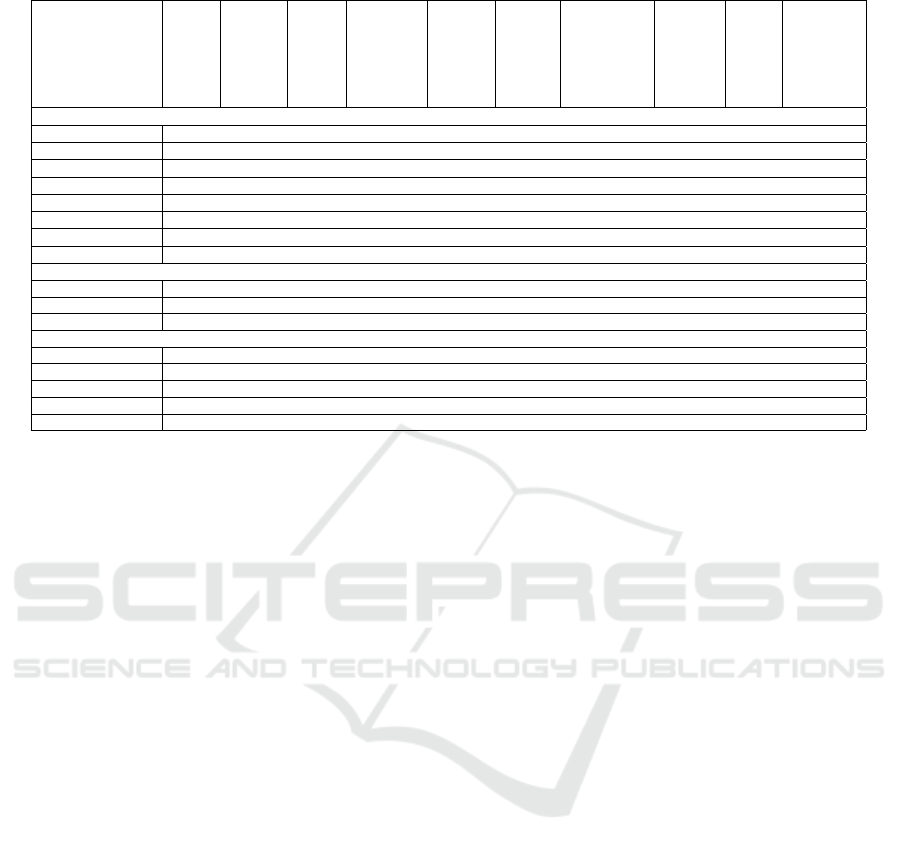
Table 1: Synthesis of Connected and Autonomous vehicles Systems.
System
Locality
Travel Time
Pollution
Smooth Driving
Data volume
Robustness
Scenario Knowledge
Mixed Traffic
Scaling
Simulation Model
Traffic flow : Choose the best path
1
or Smooth driving
2
Barthelemy et al.
1
++ + NA NA + + + + - + Macro
Mouhcine et al.
1
+ + NA NA + - + - + Macro
Di Vaio et al.
2
++ NA + + - + + + + - Micro
Taguchi et al.
2
++ NA + + - - + - - Micro
Lin et al.
1
+ + NA NA + - - - + Micro
Englund et al.
2
+ - NA NA + + - + - + - - Real
Agarwal et al.
2
- - + NA + + + - - - - Micro
Ioannou et al.
2
++ + + NA + + + - + Micro
Intersection
Jin et al. - - NA - + + - - + - + Micro
Kamal et al. - - NA + + + - - + - + Micro
Gaciarz et al. + + NA + + - + + - - + Macro
Lane merging
Rios-Torres et al. + - NA + + + - - + - - Micro
Wang et al. + - + + + - - - + - - Micro
Mosebach et al. ++ NA NA + ++ + - - + - Micro
Sobieraj et al. ++ NA NA + + - + ++ + Micro
Gueriau et al. ++ + NA + + - + - ++ + Micro
it should be able to learn which behaviour is better
for the next time a similar situation will be encoun-
tered. Because the amount of information available is
continuously evolving and it seems unlikely that the
same data would be expressed in the same way by
two different vehicles, a CAV should learn continu-
ously the usefulness of information without seman-
tic. At first, the CAV would drive safely, like a new
driver, and it will gradually acquire experience while
driving, improving its behaviour. A CAV that aims at
managing every road situation needs to be able to ex-
change its data and to negotiate with other vehicles.
Moreover, it needs to be able to cooperate with other
connected entities to refine its knowledge of the con-
text and thus, it will lead to have a better behaviour
(Di Vaio et al., 2019; Barthelemy and Carletti, 2017).
It seems that situation awareness can be a barrier
because it is impossible to model all the possible sit-
uations in beforehand. It is desirable for a CAV to
be able to understand the current situation so that it
can adapt its behaviour to it. Coordination between
vehicles will make it possible to solve many traffic
situations. So, cooperation and negotiation must
be implemented in each CAV (Llatser et al., 2015;
Gaciarz et al., 2015; Wang et al., 2018b).
The presence of non CAV could be addressed by
considering them as non cooperative entities with un-
predictable behaviour. The CAV must be able to iden-
tify them and learn how to interact with them, with
avoidance strategy (Degas et al., 2019) and the ex-
change of information without communication.
In the validation step, the evaluation of the CAVs
fleet must be done simultaneously at the micro and
macro levels. The first one is necessary to observe
how a CAVs fleet manages a precise situation while
the second one would be used to observe the result at
a larger scale.
If the CAVs fleet design follows the guideline, an
improvement of the road traffic (pollution, travel time
and smooth driving) will be observed.
8 CONCLUSION
This paper proposes a state of the art of CAVs sys-
tems. An analysis of the papers is made according
to a set of criteria that are presented beforehand. It
is shown that communication exchange and coordina-
tion between vehicles allows them to better manage
the situations they encounter. After comparing and
analysing different systems, a guideline is proposed,
mainly: local control and interactions, cooperation
and negotiation between CAVs and lifelong learning.
ACKNOWLEDGEMENTS
This work is part of the neOCampus opera-
tion of the Universit
´
e Toulouse III Paul Sabatier.
www.neocampus.org
ICAART 2020 - 12th International Conference on Agents and Artificial Intelligence
264

REFERENCES
Agarwal, A. and Paruchuri, P. (2016). V2V communica-
tion for analysis of lane level dynamics for better ev
traversal. In 2016 IEEE Intelligent Vehicles Sympo-
sium (IV), pages 368–375. IEEE.
Barthelemy, J. and Carletti, T. (2017). A dynamic
behavioural traffic assignment model with strategic
agents. Transportation Research Part C: Emerging
Technologies, 85:23–46.
Behrisch, M., Bieker, L., Erdmann, J., and Krajzewicz,
D. (2011). Sumo–simulation of urban mobility: an
overview. In Proceedings of SIMUL 2011, The Third
International Conference on Advances in System Sim-
ulation. ThinkMind.
Degas, A., Rantrua, A., Kaddoum, E., Gleizes, M.-P., and
Adreit, F. (2019). Dynamic collision avoidance using
local cooperative airplanes decisions. CEAS Aeronau-
tical Journal, pages 1–12.
Di Vaio, M., Fiengo, G., Petrillo, A., Salvi, A., Santini, S.,
and Tufo, M. (2019). Cooperative shock waves miti-
gation in mixed traffic flow environment. IEEE Trans-
actions on Intelligent Transportation Systems.
Dresner, K. and Stone, P. (2008). A multiagent approach
to autonomous intersection management. Journal of
artificial intelligence research, 31:591–656.
Englund, C., Chen, L., Ploeg, J., Semsar-Kazerooni, E.,
Voronov, A., Bengtsson, H. H., and Didoff, J. (2016).
The grand cooperative driving challenge 2016: boost-
ing the introduction of cooperative automated vehi-
cles. IEEE Wireless Communications, 23(4):146–152.
French government (2019). Key figures for french
road traffic. https://www.statistiques.developpement-
durable.gouv.fr/. Accessed: 2019-02-18.
Gaciarz, M., Aknine, S., and Bhouri, N. (2015). Automated
negotiation for traffic regulation. Advances in Social
Computing and Multiagent Systems, pages 1–18.
Gu
´
eriau, M., Billot, R., El Faouzi, N.-E., Monteil, J.,
Armetta, F., and Hassas, S. (2016). How to assess the
benefits of connected vehicles? a simulation frame-
work for the design of cooperative traffic management
strategies. Transportation research part C: emerging
technologies, 67:266–279.
Ioannou, P. and Zhang, Y. (2018). Reducing truck emis-
sions and improving truck fuel economy via intelli-
gent transportation system technologies. Retrieved
from https://escholarship.org/uc/item/2rr3b8mz.
Jin, Q., Wu, G., Boriboonsomsin, K., and Barth, M. (2012).
Multi-agent intersection management for connected
vehicles using an optimal scheduling approach. In
2012 International Conference on Connected Vehicles
and Expo (ICCVE), pages 185–190. IEEE.
Kamal, M. A. S., Imura, J.-i., Hayakawa, T., Ohata, A., and
Aihara, K. (2014). A vehicle-intersection coordina-
tion scheme for smooth flows of traffic without using
traffic lights. IEEE Transactions on Intelligent Trans-
portation Systems, 16(3):1136–1147.
Kamal, M. A. S., Taguchi, S., and Yoshimura, T. (2015).
Efficient vehicle driving on multi-lane roads using
model predictive control under a connected vehicle
environment. In 2015 IEEE Intelligent Vehicles Sym-
posium (IV), pages 736–741. IEEE.
Lin, S.-H. and Ho, T.-Y. (2019). Autonomous vehicle rout-
ing in multiple intersections. In Proceedings of the
24th Asia and South Pacific Design Automation Con-
ference, pages 585–590. ACM.
Llatser, I., K
¨
uhlmorgen, S., Festag, A., and Fettweis, G.
(2015). Greedy algorithms for information dissem-
ination within groups of autonomous vehicles. In
2015 IEEE Intelligent Vehicles Symposium (IV), pages
1322–1327. IEEE.
Monteil, J., Billot, R., Sau, J., Armetta, F., Hassas, S.,
and Faouzi, N.-E. E. (2013). Cooperative highway
traffic: Multiagent modeling and robustness assess-
ment of local perturbations. Transportation research
record, 2391(1):1–10.
Mosebach, A., R
¨
ochner, S., and Lunze, J. (2016). Merging
control of cooperative vehicles. IFAC-PapersOnLine,
49(11):168–174.
Mouhcine, E., Mansouri, K., and Mohamed, Y. (2018).
Solving traffic routing system using VANet strategy
combined with a distributed swarm intelligence opti-
mization. Journal of Computer Science, page 14.
Pulter, N., Schepperle, H., and B
¨
ohm, K. (2011). How
agents can help curbing fuel combustion: a perfor-
mance study of intersection control for fuel-operated
vehicles. In The 10th International Conference on
Autonomous Agents and Multiagent Systems-Volume
2, pages 795–802. International Foundation for Au-
tonomous Agents and Multiagent Systems.
Rios-Torres, J. and Malikopoulos, A. A. (2016). Auto-
mated and cooperative vehicle merging at highway
on-ramps. IEEE Transactions on Intelligent Trans-
portation Systems, 18(4):780–789.
SAE On-Road Automated Vehicle Standards Committee
(2018). Taxonomy and definitions for terms related
to on-road motor vehicle automated driving systems.
SAE Standard J, 3016:1–16.
Sharif, A., Li, J. P., and Saleem, M. A. (2018). Internet
of things enabled vehicular and ad hoc networks for
smart city traffic monitoring and controlling: a re-
view. International Journal of Advanced Networking
and Applications, 10(3):3833–3842.
Sobieraj, J. (2018). Methodes et outils pour la concep-
tion de Syst
`
emes de Transport Intelligents Cooperat-
ifs. PhD thesis, Universite Paris-Saclay.
Sobieraj, J., Hutzler, G., and Klaudel, H. (2017).
Mod
´
elisation et simulation de la coop
´
eration dans les
Syst
`
emes de Transport Intelligents : un comparatif. In
Journ
´
ees Francophones sur les Syst
`
emes Multi-Agents
(JFSMA 2017), Caen, France.
Wang, Z., Kim, B., Kobayashi, H., Wu, G., and Barth,
M. J. (2018a). Agent-based modeling and simulation
of connected and automated vehicles using game en-
gine: A cooperative on-ramp merging study. arXiv
preprint arXiv:1810.09952.
Wang, Z., Wu, G., and Barth, M. (2018b). Distributed
consensus-based cooperative highway on-ramp merg-
ing using v2x communications. Technical report, SAE
Technical Paper.
Management of Intelligent Vehicles: Comparison and Analysis
265
