
A First-person Database for Detecting Barriers for Pedestrians
Zenonas Theodosiou
1
, Harris Partaourides
1
, Tolga Atun
1
, Simoni Panayi
1
and Andreas Lanitis
1,2
1
Research Centre on Interactive Media Smart Systems and Emerging Technologies, Nicosia, Cyprus
2
Department of Multimedia and Graphic Arts, Cyprus University of Technology, Limassol, Cyprus
Keywords:
Pedestrians, Safety, Visual Lifelogging, Egocentric Vision, First-person View, Dataset.
Abstract:
Egocentric vision, which relates to the continuous interpretation of images captured by wearable cameras, is
increasingly being utilized in several applications to enhance the quality of citizens life, especially for those
with visual or motion impairments. The development of sophisticated egocentric computer vision techniques
requires automatic analysis of large databases of first-person point of view visual data collected through wear-
able devices. In this paper, we present our initial findings regarding the use of wearable cameras for enhancing
the pedestrians safety while walking in city sidewalks. For this purpose, we create a first-person database that
entails annotations on common barriers that may put pedestrians in danger. Furthermore, we derive a frame-
work for collecting visual lifelogging data and define 24 different categories of sidewalk barriers. Our dataset
consists of 1796 annotated images covering 1969 instances of barriers. The analysis of the dataset by means
of object classification algorithms, depict encouraging results for further study.
1 INTRODUCTION
Walking is the most basic and highly popular form of
transportation and it is evident today that it is getting
more dangerous. According to the World Health Or-
ganization (WHO, 2019), 270K pedestrians per year
lose their lives around the world. Contemporary cities
have to deal with the various problems caused by the
increasing amount of technical barriers and damages
that occur on the footpaths which endanger the lives
of pedestrians (Sas-Bojarska and Rembeza, 2016).
Guaranteeing everyday urban safety has always been
a central theme for local authorities, addressing re-
markable human, social, and economic aspects. The
need for clear paths in urban sidewalks, free of bar-
riers, continuous, and in a well-maintained condition
is of great importance. Thus, the automatic detection
of obstructions and damages can have a positive im-
pact on the sustainability and safety of citizens’ com-
munities. The pedestrian detection (Szarvas et al.,
2005) is one of the main research areas as an ultimate
aim to develop efficient systems to eliminate deaths
in traffic accidents. The safety in roads has attracted
a large interest in the last years and a number of stud-
ies have been presented for both pedestrians (Nesoff
et al., 2018; Wang et al., 2012) and drivers (Timmer-
mans et al., 2019). A study on pothole detection was
presented by Prathiba el al. (Prathiba et al., 2015) for
the identification of different types of cracks on road
pavements. Wang et al. (Wang et al., 2012) developed
the WalkSafe, a smartphone application for vehicles
recognition to help pedestrians cross safely roads.
Jain et al.(Jain and Gruteser, 2017) presented an ap-
proach based on smartphone images for recognizing
the texture of the surfaces in pedestrians routes to be
used for safety purposes. A mobile application which
uses phone sensors was also presented to enhance the
safety of the distracted pedestrians (Tung and Shin,
2018). On the other hand, Maeda et al (Maeda et al.,
2018) proposed an approach for the detection of sev-
eral road damages in smartphones using convolution
networks.
In the realm of safety, the practicality and efficient
use of wearable cameras can effectively help increase
the safety of pedestrians. The continuous visual data
acquisition can lead to the real-time detection of ob-
structions, warning the wearers of the potential dan-
gers and alerting the authorities for taking mainte-
nance or corrective actions for ensuring the elimina-
tion of dangerous spots for pedestrians. Due to the
broad use of deep learning algorithms in analysing
visual lifelogging data, the existence of large anno-
tated datasets are more essential than ever before. Al-
though there are available datasets created by wear-
able or smartphone cameras refer to road safety, none
of them is dedicated specifically for the safety of
660
Theodosiou, Z., Partaourides, H., Atun, T., Panayi, S. and Lanitis, A.
A First-person Database for Detecting Barriers for Pedestrians.
DOI: 10.5220/0009107506600666
In Proceedings of the 15th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2020) - Volume 5: VISAPP, pages
660-666
ISBN: 978-989-758-402-2; ISSN: 2184-4321
Copyright
c
2022 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

pedestrians in sidewalks. This work outlines a first-
person database, which can be used for the develop-
ment of techniques for automatic detection of barri-
ers and other damages that pose safety issues to the
pedestrians. In addition, we present initial results
on the performance of the dataset in a classification
scheme using a well-known deep Convolutional Neu-
ral Network (CNNs) as a baseline and elaborate on
the promising outcomes.
The structure of the rest of the paper is as follows:
Section 2 presents the current state of the art focus-
ing on visual lifelogging, datasets and image inter-
pretation techniques. Section 3 is dedicated on the
created dataset explaining the method we have fol-
lowed to collect and annotate the lifelogging data.
The methodology we used to evaluate the perfor-
mance along with the initial results are shown in Sec-
tion 4. Finally, conclusions and future work are drawn
in Section 5.
2 BACKGROUND
2.1 Visual Lifelogging
Visual lifelogging has been broadly used nowadays
due to the advances in wearable and sensing tech-
nologies (Theodosiou and Lanitis, 2019). The small
size and light weight of wearable cameras in addi-
tion to the broad use of smartphone devices allow
the 24/7 uninterrupted acquisition of the carriers daily
life (Bola
˜
nos et al., 2015). The interpretation of lifel-
ogs can lead to useful results which can be exploited
to enhance health, protection, security, and to analyze
lifestyle and daily habits. The automatic analysis of
visual lifelogging data combining both computer vi-
sion and machine learning techniques, is known as
Egocentric or First-person camera Vision.
Several image analysis methodologies have been
proposed dedicated on visual lifelogging for both
indoor and outdoor applications. In (Bolaos and
Radeva, 2016) a two-step method is presented for
food detection and recognition in lifelogging images.
A recognition of personal locations in daily activi-
ties of the wearer is studied in (Furnari et al., 2017)
while social interactions and lifestyle patterns are ana-
lyzed in (Bano et al., 2018) and (Herruzo et al., 2017)
respectively. Visual lifelogging has also been used
in ambient assisted living applications (Climent-Prez
et al., 2020) such as fall detection, monitoring, etc.
Wearable cameras can play the role of a digi-
tal memory helping people with memory problems
to improve the quality of their daily life (Oliveira-
Barra et al., 2019). Thus, the recording, storage
and retrieval of inaccessible memories through vi-
sual lifelogging has been extensively studied the last
years (Silva et al., 2016). In addition, navigation
and safety applications have also been developed us-
ing wearable cameras, enhancing the quality of liv-
ing for several groups of people. Jiang et al. (Jiang
et al., 2019) proposed a vision sensors based system
for assisting people with vision impairments while
in (Maeda et al., 2018) a smartphone application
of road damages detection is presented for drivers
protection. A variation of the latter system can be
adopted to detect and recognize the barriers in side-
walks for pedestrians safety.
2.2 Egocentric Databases
The creation of annotated databases is a crucial step
for the development of new egocentric vision tech-
niques. The current trends in automatic analysis
and interpretation of lifelogs collected from wear-
able camera devices relate with deep learning meth-
ods that perform better when are trained and tested
on qualitative and quantitative data. Mayor and Mur-
ray (Mayol and Murray, 2005) created the first ego-
centric vision dataset with 600 frames captured by a
wearable camera installed on the left shoulder of the
wearer. The dataset was used for training systems to
recognize hand actions. The abundance and availabil-
ity of wearable cameras and smartphones have led to
the creation of several first person datasets the last
years (Bola
˜
nos et al., 2015) including datasets for ob-
ject recognition (Bullock et al., 2015), activity recog-
nition (Gurrin et al., 2016), social interaction analy-
sis (Bano et al., 2018), etc. However, not all datasets
are publicly available to the academic community.
Epic-kitchens (Damen et al., 2018) is the largest
publicly available egocentric dataset with a total of
55 hours of recordings collected by a head-mounted
high-definition camera. The dataset consists of
11.5 million frames covering daily activities in 32
kitchens. KrishnaCam (Singh et al., 2016) is an-
other example of a large available egocentric dataset
dedicated on daily outdoor activities captured using
Google Glass. It consists of 460 unique video record-
ings, each ranging in length from a few minutes to
about a half hour of video, making up 7.6 million
frames in total.
Concerning the road safety, several datasets have
been created for road and pavement cracks detec-
tion (Gopalakrishnan, 2018). The dataset presented
by Zhang et al. (Zhang et al., 2016) was created using
a low-cost smartphone. The dataset consists of 500
images and was used to detect cracks on pavements
with the aid of deep convolutional networks. A large-
A First-person Database for Detecting Barriers for Pedestrians
661

scale dataset focused on road damages was created by
Maeda et al. (Maeda et al., 2018). This dataset was
made up of 9,053 road damage images captured with
a smartphone installed on a car. A large dataset was
created by merging recordings captured by 8 pedestri-
ans while walking in 4 large cities (Jain and Gruteser,
2017). The dataset used to detect different surfaces in
daily walking paths. Although the dataset has many
possibilities to be used in several applications, its not
annotated according to the relevant barriers and its not
publicly available yet.
2.3 Image Interpretation
The interpretation of visual lifelogs requires flexi-
ble algorithms that can address their specific features
such as, large number of objects, blurring, motion ar-
tifacts, lighting variations, etc. Due to the difficulties
of the traditional algorithms to cope with these limi-
tations, deep learning algorithms have been success-
fully used the last years to analyze the visual content
of data collected through wearable devices.
CNNs have been established as the most promi-
nent strain of neural networks within the field of com-
puter vision due to their efficiency in capturing spa-
tial dependencies in images. They have achieved
great strides in fundamental tasks for image inter-
pretation such as classification, localization and ob-
ject detection. The radical advancements in CNNs
has been possible by the abundance of large pub-
lic image repositories in the likes of ImageNet, Pas-
cal VOC and MS COCO (Russakovsky et al., 2015;
Lin et al., 2014; Everingham et al., 2007) which
serve as platforms for enhancing generations of ar-
chitectures in a bid to achieve state-of-the-art perfor-
mances (Krizhevsky et al., 2012; Simonyan and Zis-
serman, 2014; He et al., 2016).
Since their conception (LeCun et al., 1998), CNNs
have evolved into numerous different architectures
with allow for an increased network depth and com-
plexity but, at their core, their basic components have
remained very similar. Even though ResNet is ap-
proximately 20 times deeper than AlexNet and 8
times deeper than VGGNet (Gu et al., 2018), all three
architectures consist of three types of core layers:
convolutional, pooling and fully connected layers.
In general, a CNN is considered as a hierarchi-
cal feature extractor where the convolutional layers
are responsible for creating feature maps, the pooling
layers are used for reducing the resolution of the fea-
ture maps and the fully connected layers perform the
high-level feature learning, i.e. image interpretation
tasks.
3 BARRIER DETECTION
DATASET
Based on our background research, we observed that
there is no available dataset to effectively tackle is-
sues regarding the safety of pedestrians on city side-
walks. The detection and identification of barriers
that may endanger pedestrians’ lives are facing sev-
eral challenges such as: the barriers type (i.e. cracks,
objects, etc.), the small differences between the harm-
less and dangerous barriers a pedestrian encounters
in sidewalks, the fact that a harmless object can be-
come dangerous in the case of pedestrians, and the
fact that a barrier is considered dangerous when it
is in the vicinity of the pedestrian. To this end, we
design a methodology for collecting and annotating
such data which then utilize to populate our dataset.
In this section, we present in more detail the proposed
methodology, the data acquisition and annotation pro-
cess, followed by an overview of the created dataset.
3.1 Proposed Methodology
Our approach for populating the pedestrians’ barriers
dataset consists of three core tasks. Initially, a person
walks around the city limits sidewalks collecting in
frequent time intervals snapshots with the rear camera
of a mid-range smartphone. The smartphone is placed
on the chest of the wearer with a slight downwards an-
gle to accommodate our target area which is near the
pedestrian’s feet. Our approach considers a mid-range
smartphone which is used by the majority of pedes-
trians. This is followed, by a pre-processing step that
blurs faces, license plates, and brands to solve privacy
issues and comply with the EU General Data Protec-
tion Regulation (GDPR).
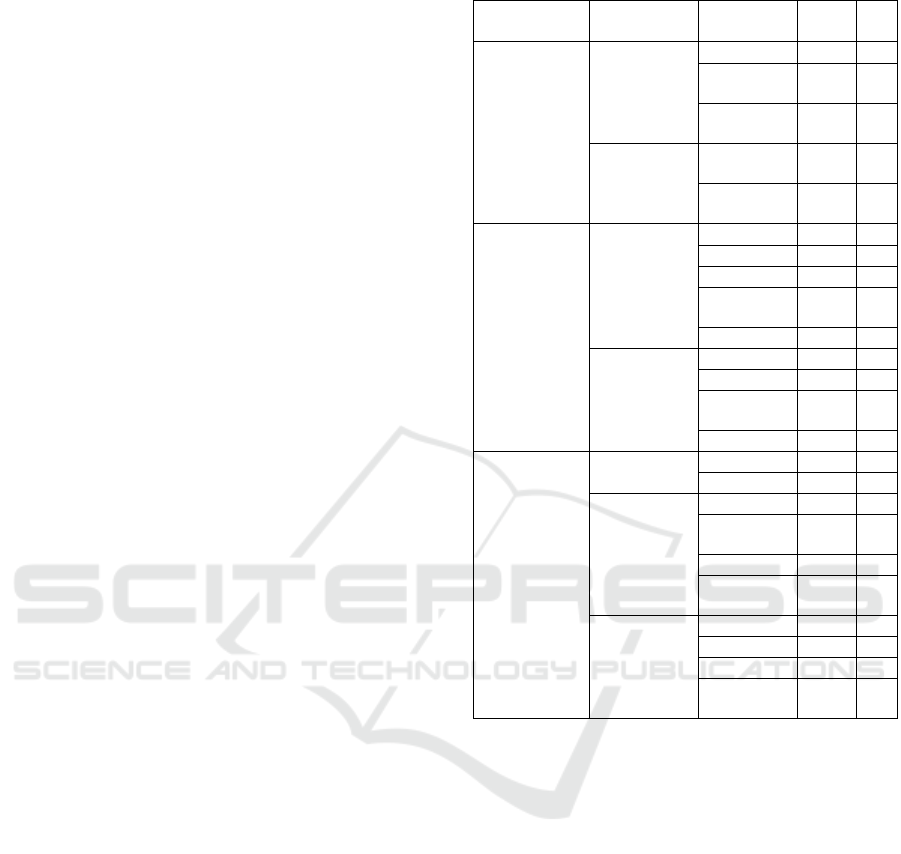
Finally, the annotation process consists of plac-
ing bounding boxes around the categories derived by
our analysis of the common barriers existing in ur-
ban areas. Specifically, the annotator must consider
the danger area around a pedestrian. This translates
to a region of 2m around the pedestrian. Considering
the downwards angle of the camera this is broadly de-
fined in the lower half of the collected images. Addi-
tionally, the annotation process considers up to three
(most imminent) barriers which are placed up to the
middle of the image. The barriers are categorized in
24 classes spanning in 3 main categories and 7 barrier
types covering a broad range of possible barriers on
the city sidewalks that affect pedestrians’ safety. See
Table 1 for more details.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
662
3.2 Dataset
During the first stage of the acquisition process, an in-
dividual collected 1796 first-person images by walk-
ing 12.3Km in the city center of Nicosia, Cyprus. The
smartphone used was an iPhone 7 with snapshot res-
olution of 1512x2016 pixels . The collected images
were manually annotated using the VGG Image An-
notator tool (Dutta and Zisserman, 2019) into the 24
different classes. A total of 1969 bounding boxes
were found. 472 of the bounding boxes are related
to barriers of the Infrastructure, 909 are related to
barriers of Physical Condition and the remaining 588
to the category indicating Temporary barriers. Tree
was the most popular Barrier class with 360 bound-
ing boxes while Boulder, Chair, Table, Mail Box and
Bench were the less popular classes (1). Examples of
the annotation on different types of barriers are de-
picted in Fig. 1.
Looking at the confusion matrix, we can observe
that there is a general trend which suggests that as
the number of examples within a class increases so
do its performance metrics. This is because the more
examples a classifier is given, the more robust it can
become in identifying the features of a specific class.
It can also be seen that for some classes, our baseline
model has difficulty distinguishing them and conse-
quently mislabels most of their examples. For exam-
ple, class B64 has most of its images misclassified in
B01 which suggests that either there are not enough
B64 examples or that the two barriers have very simi-
lar features. Similarly, B63 has approximately half of
its examples classified in B01.
4 EXPERIMENTAL RESULTS
To evaluate our dataset, we deploy a typical CNN
deep network using using Tensorflow (Chollet et al.,
2015) and train in an end-to-end manner using
stochastic gradient descent.
Specifically, we utilize a variant of the VGG-16
model architecture with 13 convolutional layers, 5
max pooling layers followed by two dense layers and
a dropout with a ratio set to 0.5, initialized with the
pretrained weights of ImageNet.
As part of the classification process, image regions
containing barriers, as indicated in the annotation pro-
cess, were cropped in order to isolate the objects as
individual images. We then perform a simple clas-
sification on each individual object found within our
dataset using the VGG network.
Before the images are passed through the network,
we perform preprocessing steps to avoid overfitting
Table 1: Barrier types in our dataset.
Category Barrier
Type
Detail Class #
Condition
Damage
Crack B00 28
Physical Hole/
Pot-hole
B01 323
Paver
(broken)
B02 27
Layout
Narrow
Pavement
B10 54
No
Pavement
B11 40
Infrastructure
Furniture
Bench B20 2
Street Light B21 80
Bin B22 70
Parking
Meter
B23 53
Plant Pot B24 88
Street Decor
Tree B30 360
Shrub B31 52
Parking
Prevention
B32 2
Mail Box B33 202
Temporary
Vehicles
4-wheels B50 85
2-wheels B51 61
Construction
Boulder B61 8
Safety
Sign
B62 74
Fence B63 161
Traffic
Cone
B64 151
Other
Litter B70 16
Chair B71 6
Table B72 9
Advert.
Sign
B73 17
during training. The preprocessing steps include sub-
sampling to the fixed-size of 256x256 pixels, shuf-
fling the training examples, normalize the images in
the range [0, 1], varying the brightness of images as
well as some image geometric transformations such
as random rotations, width and height shifts, horizon-
tal flips and image magnifications.
In order to balance our dataset, we conducted
training and evaluation using a reduced version of our
dataset where we removed any class which contained
30 examples or less. Our revised dataset included
15 out of the original 24 barrier classes which subse-
quently yielded a more balanced class representation.
Additionally, we randomly divided our data in a ratio
of 70% training data (1297 images) and 30% valida-
tion data (557 images).
For this experiment, our classifier was trained for
200 epochs with a batch size of 64. During train-
ing the model achieved an accuracy of 65% and a
weighted average of 59% whereas during validation
it reached 55% for both accuracy and weighted av-
A First-person Database for Detecting Barriers for Pedestrians
663

(a) (b) (c) (d)
Figure 1: Sample images from the created dataset: (a) No Pavement, (b) Parking Meter, (c) 2-Wheels, (d) 4-Wheels.
Table 2: The table represents the confusion matrix produced when the baseline model is used make predictions on the valida-
tion set.
B01 B10 B11 B21 B22 B23 B24 B30 B31 B33 B50 B51 B62 B63 B64 Recall
B01 105 0 0 0 0 0 0 33 0 10 1 2 3 24 52 0.46
B10 0 5 1 0 0 0 0 11 0 2 0 0 0 18 0 0.14
B11 0 0 18 0 0 0 0 2 0 0 8 0 0 0 0 0.64
B21 0 0 0 16 0 0 0 12 1 0 14 3 4 0 0 0.32
B22 2 0 0 1 20 0 0 12 0 1 8 1 2 0 0 0.43
B23 0 0 0 1 0 18 0 5 1 3 0 0 6 0 0 0.53
B24 0 0 4 1 0 1 16 19 0 9 1 11 4 0 0 0.24
B30 2 0 0 1 12 8 0 214 0 6 2 1 1 0 0 0.87
B31 0 0 0 3 0 0 0 12 12 1 0 1 5 0 0 0.35
B33 10 0 1 0 1 0 0 20 0 100 4 3 0 1 0 0.71
B50 0 0 3 0 0 0 0 8 0 0 45 3 0 0 0 0.76
B51 0 0 0 0 0 0 0 7 0 0 3 32 3 0 0 0.71
B62 1 0 3 1 0 0 0 13 0 0 0 5 26 0 2 0.51
B63 26 1 0 0 0 0 0 6 0 1 1 0 3 66 11 0.57
B64 55 0 0 0 0 0 0 4 0 0 0 0 0 3 52 0.46
Precision 0.52 0.83 0.60 0.67 0.61 0.67 1.00 0.57 0.86 0.75 0.52 0.52 0.46 0.59 0.44
erage. Table 2 depicts the confusion matrix on the
training data. We enhance the matrix by including the
precision and recall for each class.
5 CONCLUSIONS & FUTURE
WORK
This work presents the preliminary results of our on
going study on creating a new first-person dataset on
pedestrians barriers while walking on sidewalks. To
the best of our knowledge, this is the first dataset ded-
icated on sidewalks barriers. Currently the dataset
consists of 1796 images including 3156 instances of
barriers categorized into 24 different classes. The per-
formance of the dataset was evaluated using convolu-
tional networks for object classification. The VGG-
16 architecture was used as a baseline classifier for
15 barriers objects.
Future work involves collecting more images es-
pecially for classes with small number of instances
and repeating the annotation process by two different
annotators, as well as, using segmentation masks to
finalize the dataset. Additionally, more experiments
will be conducted to evaluate the performance of the
final dataset as a training set in deep learning schemes
for both detection and recognition tasks. Last but not
least, the future work includes the preparation of the
dataset to become publicly available and its dissemi-
nation to the research community.
The ultimate aim of this work is to develop an
accurate real time pedestrian barrier detection sys-
tem that will be incorporated in an integrated smart
city platform that aims to provide services and en-
hanced safety for pedestrians. Our belief is that this
system can be adopted by Municipalities and can be
used as an immediate report system that can commu-
nicate any safety concerns for pedestrians for them to
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
664

be repaired, thus working towards achieving the goals
set by the World Health Organization on reducing the
deaths of pedestrians.
ACKNOWLEDGEMENTS
This project has received funding from the European
Unions Horizon 2020 research and innovation pro-
gramme under grant agreement No 739578 comple-
mented by the Government of the Republic of Cyprus
through the Directorate General for European Pro-
grammes, Coordination and Development.
REFERENCES
Bano, S., Suveges, T., Zhang, J., and McKenna, S. (2018).
Multimodal egocentric analysis of focused interac-
tions. IEEE Access, 6:1–13.
Bola
˜
nos, M., Dimiccoli, M., and Radeva, P. (2015).
Toward storytelling from visual lifelogging: An
overview. IEEE Transactions on Human-Machine
Systems, 47:77–90.
Bolaos, M. and Radeva, P. (2016). Simultaneous food lo-
calization and recognition. In 23rd International Con-
ference on Pattern Recognition (ICPR), pages 3140–
3145.
Bullock, I. M., Feix, T., and Dollar, A. M. (2015). The yale
human grasping dataset: Grasp, object, and task data
in household and machine shop environments. The In-
ternational Journal of Robotics Research, 34(3):251–
255.
Chollet, F. et al. (2015). Keras. https://keras.io.
Climent-Prez, P., Spinsante, S., Michailidis, A., and Flrez-
Revuelta, F. (2020). A review on video-based active
and assisted living technologies for automated lifelog-
ging. Expert Systems with Applications, 139:112847.
Damen, D., Doughty, H., Farinella, G. M., Fidler, S.,
Furnari, A., Kazakos, E., Moltisanti, D., Munro, J.,
Perrett, T., Price, W., and Wray, M. (2018). Scaling
egocentric vision: The epic-kitchens dataset. In Euro-
pean Conference on Computer Vision (ECCV).
Dutta, A. and Zisserman, A. (2019). The VIA annotation
software for images, audio and video. arXiv preprint
arXiv:1904.10699.
Everingham, M., Van Gool, L., Williams, C. K., Winn, J.,
and Zisserman, A. (2007). The pascal visual object
classes challenge 2007 (voc2007) results.
Furnari, A., Farinella, G. M., and Battiato, S. (2017). Rec-
ognizing personal locations from egocentric videos.
IEEE Transactions on Human-Machine Systems,
47(1):6–18.
Gopalakrishnan, K. (2018). Deep learning in data-driven
pavement image analysis and automated distress de-
tection: A review. Data, 3(3):28.
Gu, J., Wang, Z., Kuen, J., Ma, L., Shahroudy, A., Shuai, B.,
Liu, T., Wang, X., Wang, G., Cai, J., et al. (2018). Re-
cent advances in convolutional neural networks. Pat-
tern Recognition, 77:354–377.
Gurrin, C., Joho, H., Hopfgartner, F., Zhou, L., and Albatal,
R. (2016). Overview of ntcir-12 lifelog task.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Herruzo, P., Portell, L., Soto, A., and Remeseiro, B.
(2017). Analyzing first-person stories based on so-
cializing, eating and sedentary patterns. In Battiato,
S., Farinella, G. M., Leo, M., and Gallo, G., edi-
tors, New Trends in Image Analysis and Processing
– ICIAP 2017.
Jain, S. and Gruteser, M. (2017). Recognizing textures
with mobile cameras for pedestrian safety applica-
tions. IEEE Transactions on Mobile Computing, PP.
Jiang, B., Yang, J., Lv, Z., and Song, H. (2019). Wearable
vision assistance system based on binocular sensors
for visually impaired users. IEEE Internet of Things
Journal, 6(2):1375–1383.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012). Im-
agenet classification with deep convolutional neural
networks. In Advances in neural information process-
ing systems, pages 1097–1105.
LeCun, Y., Bottou, L., Bengio, Y., Haffner, P., et al. (1998).
Gradient-based learning applied to document recogni-
tion. Proceedings of the IEEE, 86(11):2278–2324.
Lin, T.-Y., Maire, M., Belongie, S., Hays, J., Perona, P.,
Ramanan, D., Doll
´
ar, P., and Zitnick, C. L. (2014).
Microsoft coco: Common objects in context. In Euro-
pean conference on computer vision, pages 740–755.
Maeda, H., Sekimoto, Y., Seto, T., Kashiyama, T., and
Omata, H. (2018). Road damage detection and classi-
fication using deep neural networks with smartphone
images: Road damage detection and classification.
Computer-Aided Civil and Infrastructure Engineer-
ing, 33.
Mayol, W. W. and Murray, D. W. (2005). Wearable hand
activity recognition for event summarization. In Ninth
IEEE International Symposium on Wearable Comput-
ers (ISWC’05), pages 122–129.
Nesoff, E., Porter, K., Bailey, M., and Gielen, A. (2018).
Knowledge and beliefs about pedestrian safety in an
urban community: Implications for promoting safe
walking. Journal of Community Health, 44.
Oliveira-Barra, G., Bolaos, M., Talavera, E., Gelonch, O.,
Garolera, M., and Radeva, P. (2019). Lifelog retrieval
for memory stimulation of people with memory im-
pairment, pages 135–158.
Prathiba, T., Thamaraiselvi, M., Mohanasundari, M., and
Veerelakshmi, R. (2015). Pothole detection in road us-
ing image processing. International Journal of Man-
agement, Information Technology and Engineering,
3(4):13–20.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
A First-person Database for Detecting Barriers for Pedestrians
665

recognition challenge. International journal of com-
puter vision, 115(3):211–252.
Sas-Bojarska, A. and Rembeza, M. (2016). Planning the
city against barriers. enhancing the role of public
spaces. Procedia Engineering, 161:1556 – 1562.
Silva, A. R., Pinho, M., Macedo, L., and Moulin, C. (2016).
A critical review of the effects of wearable cameras on
memory. Neuropsychological rehabilitation, 28:1–25.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Singh, K. K., Fatahalian, K., and Efros, A. A. (2016). Kr-
ishnacam: Using a longitudinal, single-person, ego-
centric dataset for scene understanding tasks. In 2016
IEEE Winter Conference on Applications of Computer
Vision (WACV), pages 1–9.
Szarvas, M., Yoshizawa, A., Yamamoto, M., and Ogata, J.
(2005). Pedestrian detection with convolutional neural
networks. pages 224 – 229.
Theodosiou, Z. and Lanitis, A. (2019). Visual lifelogs re-
trieval: State of the art and future challenges. In 2019
14th International Workshop on Semantic and Social
Media Adaptation and Personalization (SMAP).
Timmermans, C., Alhajyaseen, W., Reinolsmann, N., Naka-
mura, H., and Suzuki, K. (2019). Traffic safety culture
of professional drivers in the state of qatar. IATSS Re-
search.
Tung, Y. and Shin, K. G. (2018). Use of phone sensors to
enhance distracted pedestrians safety. IEEE Transac-
tions on Mobile Computing, 17(6):1469–1482.
Wang, T., Cardone, G., Corradi, A., Torresani, L., and
Campbell, A. T. (2012). Walksafe: A pedestrian safety
app for mobile phone users who walk and talk while
crossing roads. In Proceedings of the Twelfth Work-
shop on Mobile Computing Systems & Applica-
tions, HotMobile ’12, pages 5:1–5:6.
WHO (2019). Pedestrian safety: a road safety manual
for decision-makers and practitioners. https://www.
who.int/roadsafety/projects/manuals/pedestrian/en/.
Accessed: 2019-07-30.
Zhang, L., Yang, F., Zhang, Y., and Zhu, Y. (2016). Road
crack detection using deep convolutional neural net-
work.
VISAPP 2020 - 15th International Conference on Computer Vision Theory and Applications
666
